Нахождение импульсных управлений для многозвенных манипуляционных роботов

Автор: Чупин И.А.
Журнал: Вестник Бурятского государственного университета. Математика, информатика @vestnik-bsu-maths
Рубрика: Математическое моделирование и обработка данных
Статья в выпуске: 4, 2023 года.
Бесплатный доступ
Механическая модель манипуляционного робота состоит из конечного набора абсолютно твердых тел, соединения которых описываются идеальными стационарными геометрическими связями. Силовые взаимодействия в системе определяются потенциальными и управляющими силами. Рассматривается нелинейная задача управления движениями манипуляционного робота. Импульсные управления в начальный момент времени сообщают необходимую энергию роботу для выхода на траекторию, соединяющую его начальное и конечное положения в пространстве конфигураций. Для гашения скоростей робота в конечном положении также используются импульсные управления. При движении по траектории управления выключаются. Для нахождения траектории и времени движения по траектории используется теорема Якоби для канонической системы дифференциальных уравнений. Вычисляется энергия, необходимая для перевода манипуляционного робота из начального положения равновесия в конечное положение равновесия. Рассматривается задача параметрической оптимизации движений робота.
Оптимальное управление, манипуляционный робот, импульсное управление, уравнение гамильтона - якоби, первые интегралы, оптимизация, быстродействие, энергозатратность
Короткий адрес: https://sciup.org/148327596
IDR: 148327596 | УДК: 51-7 | DOI: 10.18101/2304-5728-2023-4-53-65
Finding impulse control for multi-link manipulation robots
The mechanical model of a manipulative robot consists of a finite set of absolutely rigid bodies, the connections of which are described by ideal stationary geometric connections. Force interactions in the system are determined by potential and controlling forces. The nonlinear problem of controlling the movements of a manipulation robot is considered. Impulse controls at the initial moment of time provide the necessary energy to the robot to enter the trajectory connecting its initial and final positions in the configuration space. Impulse controls are also used to dampen the robot's speeds in the final position. When moving along the trajectory, the controls are turned off. To find the trajectory and the time of movement along the trajectory, the Jacobi theorem for the canonical system of differential equations is used. The energy required to transfer the manipulating robot from the initial equilibrium position to the final equilibrium position is calculated. The problem of parametric optimization of robot movements is considered.
Текст научной статьи Нахождение импульсных управлений для многозвенных манипуляционных роботов
Рассматривается механическая модель манипуляционного робота, состоящая из конечного набора абсолютно твердых тел, соединения которых описываются идеальными стационарными геометрическими связями. Силовые взаимодействия в системе определяются потенциальными и управляющими силами.
Считаем, что система имеет n степеней свободы и положения манипулятора описываются обобщенными координатами q i ,...,q n . В координатном пространстве R n вектора положений q = (q i ,..., q n )T принадлежат рабочей зоне D , которая является открытым связанным множеством D ⊆ R n .
Кинетическая энергия манипулятора определяется формулой:
T = 2 52 a ij (q^q i q j = 2 (A(q)q,q) , i,j =1
в которой элементы матричной функции A(q) = (aij(q)')'nj=i являются непрерывнымо дифференцируемыми функциями в области D, в каждой точке которой матрица A(q) является симметричной и положи- тельно определенной.
Потенциальное взаимодействие описывается потенциальной энергией П(q) = П(q 1 ,..., q n ), непрерывно дифференцируемой функцией, а управляющие взаимодействия обобщенными силами U i (t), i = 1,n.
Движения манипулятора будем описывать системой канонических дифференциальных уравнений. Обобщенные импульсы определяются формулами:
∂T pi = , i = 1, n.
dq i
Вводя вектор обобщенных импульсов p = (pi, ...,pn)T, имеем p = A(q)q, q = A Hq^.
Функция Лагранжа определяется формулой L(q, q) = T(q, q) — П(q), а функция Гамильтона формулой
H ( q,p) = [(q,p) — L(q,q)] q ^ p = 2 ( A -^ qMp ) + П (q).
Канонические уравнения движения имеют вид [1]:
- dH (q,p) . dH (q,p) . --- qi = 5-----, Pi =----+ Ui(t), i = 1,n. (1)
∂p i ∂q i
Требуется найти управления U i (t),i = 1,n, которые позволяют перевести манипулятор из заданного начального положения равновесия q(0) = q 0 , p(0) = 0 в заданное конечное положение равновесия q(T k ) = q T , P(T k ) = 0 .
Время перевода T k манипулятора из начального положения в конечное является неизвестным.
При решении задачи будем рассматривать следующее множество импульсных управлений
U i (t) = S 0 5(t)+ S T 5(t — T k ), i = 1n t E [0,T k ], (2)
где J(-) — функция Дирака.
Импульсные управления генерируемые в начальный момент времени t = 0 служат для перевода манипулятора из начального положения равновесия на специальную траекторию движения в фазовом пространстве R 2 n , проекция которой на координатное пространство R n соединяет точки q 0 и q T . При движении по траектории управления выключаются. Импульсные управления генерируемые в конечный момент времени t = T k служат для гашения скорости в конечном положении.
Для решения задачи необходимо определить траекторию движения, соединяющую точки q 0 и q T в координатном пространстве, время T k движения по траектории из начального положения в конечное положение и силовые импульсы S 0 , S T , i = 1,n.
1 Нахождение траектории в координатном пространстве
При движении по траектории управления отсутствуют. При решении задачи используем первые интегралы канонических уравнений
. dH (q,p) . dH (q,p) . — qi = —я---, Pi =--^—, i = 1,n, dpi d^li которые определяются теоремой Якоби [1]
dW (q,a,h) . .-----
-----------= b i , i = 1, n — ∂a i
1, a = (a i ,...,a n- i )T,
dW (q,a,h) . -—
-----------= pi, i = l,n, ∂qi dW (q,a,h)
-----.----- = t + t o . ∂h
Здесь a i , b i , i = 1,n — 1, h, to — произвольные вещественные постоянные, W(q, a, h) — полный интеграл уравнения Гамильтона — Якоби для консервативной системы [1]
H
∂W q, , ∂q 1
∂W
= h ∂q n
Будем полагать, что известен полный интеграл уравнения Гамильтона — Якоби. Например, полный интеграл уравнения Гамильтона — Якоби может быть найден при выполнении условий теоремы Лиувилля [2].
Теорема 1. Пусть векторы начальных положений q 0 и конечных положений q T (q 0 = q T ) принадлежат рабочей зоне D, существует единственное решение a i = a i (h),i = 1, n — 1 системы уравнений
∂
da (W(q0,a, h) - W(q ,a, h)) = 0, i = 1,n — 1, и траектория, соединяющая начальное и конечное положения, принадлежит рабочей зоне D , она неявно определяется системой уравнений
∂ da: (W(q,a,h) - W(q ,a,h)a=a(h) = 0, i = 1,n - 1, (7)
и время движения по траектории из точки q 0 в qT определяется формулой:
T k = T k (h) = dhh ( W (q , a, h) — W(q , a, h)) a = a(h ) . (8)
Доказательство. Из (3) следует необходимость выполнения усло- вий
dW (q, a, h) ∂a i
dW (q°,a,h) , . .------T
-------------- = b i , i = 1, n — 1. ∂a i
Тогда из (9) следует необходимость выполнения равенств (6), которые неявно определяют ai = ai(h),i = 1,n — 1. Из равенств (9) с учетом ai = ai(h),i = 1,n — 1 получим уравнения (7) для траектории. Также из равенств (9) находим произвольные постоянные bi и dW(q°,a(K),K)
i = 1, n — 1.
b i b i ( h ) da i ,
Из формулы (5) в начальный момент времени t = 0 находим постоянную t 0
, 8W (q°,a(h),h)
t 0 =------ dh ------'
и время движения по траектории (7) из начального положения в конечное определяется формулой (8). Теорема доказана.
2 Нахождение силовых импульсов
Для множества допустимых импул ьс ных управлений (2) требуется найти силовые импульсы S 0 , S T , i = 1,n, реализующие перевод манипулятора из начального в конечное положения.
Теорема 2. Пусть выполнены условия теоремы 1. Тогда для перевода манипулятора из начального положения равновесия в конечное положение равновесия используются силовые импульсы, определяемые формулами:
0 dW (q 0 ,a(h),h) , dW (q T ,a(h),h) —
S i =----dq----- S i = 8i -----1 ’ ^n (10)
Доказательство. Интегрируя вторую группу дифференциальных уравнений (1) на отрезках [0, e], [T k — e, T k ], где e > 0, при учете формы управлений (2) и начальных условий, имеем
[e dH(q(s),p(s)) , Гe я—
P i (e) = — ------------—ds + S i 5(s)ds, i = 1,n,
0 ∂q i 0
A ГTk dH (q(s),p(s)) д , Tk сТ;( т\д • i
— p i ( T k — e) = — д ds + / S i o ( s — T k ) ds, i = 1 ,n-
T k - ε ∂q i T k - ε
При e ^ 0, имеем p,(+0) = S0, i = 1,n, (11)
P i (T k — 0) = —S i , i = 1^. (12)
Из равенств (4) с учетом равенств (11), (12) находим силовые импульсы (10). Теорема доказана.
3 Нахождение затрат энергии на переход из начального положения в конечное
При движении по траектории управляющие воздействия не действуют и энергия не расходуется. При выходе на траекторию работа импульсных сил определяется формулой [3]
Ao = 2 pT (+0) A-1 (q0 )p(+0), а при сходе с траектории – определяется формулой [3]:
A T = — ^p T (T k — 0)A 1 (q T )p(T k — 0).
Используя интеграл энергии
h(q,p) = 2 (A-1(q)p,p) + n(q) = h, находим работу импульсных сил при выходе на траекторию
A 0 = h - П (q 0 )
и работу импульсных сил при сходе с траектории
A t = -h + П(q T ).
Тогда энергия, необходимая для перевода манипулятора из начального положения равновесия в конечное, определяется формулой
E = E (h) = A o + |A t | = 2h - П(q 0 ) - П(q T ). (13)
Энергия зависит от произвольного параметра h .
Выбор произвольного параметра h определяет траекторию движения, время движения по траектории, силовые импульсы и затраты энергии на движения. Сформулируем три критериальные задачи выбора оптимального значения параметра h .
Задача 1. Заданы вектор начальных положений q 0 и вектор конечных положений q T (q 0 = q T ), принадлежащие рабочей зоне D. Найти значение параметра h 1 , которое удовлетворяет заданному условию ограничения затрат энергии E (h) < E и соответствует минимальному времени движения манипулятора по траектории при условии принадлежности ее рабочей зоне D :
T k = T k (h i ) = min T k (h).
h ∈ R
Задача 2. Заданы вектор начальных положений q 0 и вектор конечных положений q T (q 0 = q T ), принадлежащие рабочей зоне D. Найти значение параметра h 2 , которое удовлетворяет заданному условию быстродействия T k (h) < T k и соответствует минимальным энергозатратам для перехода манипулятора по траектории при условии принадлежности ее рабочей зоне D:
E = E (h 2 ) = min E(h).
h ∈ R
Задача 3. Заданы вектор начальных положений q 0 и вектор конечных положений q T (q 0 = q T ), принадлежащие рабочей зоне D. Найти значение параметра h 3 , которое минимизирует комбинированный функционал J , учитывающий время движения манипулятора по траектории, принадлежащей рабочей зоне D, и затраты энергии на это движение:
J(h3) = min J(h) = min (k Tk(h) + E(h)) , h∈R h∈R где k — задаваемый весовой коэффициент.
4 Пример применения методики нахождения импульсных управлений
Рассмотрим метод нахождения импульсных управлений на примере двухзвенного манипулятора, условно изображенного на рис. 1, состоящего из двух абсолютных твердых тел и совершающих плоскопараллельное движение в вертикальной плоскости. Первое тело совершает поступательное движение вдоль горизонтальной прямой, а второе тело вращается в вертикальной плоскости относительно первого тела. Второе тело цилиндрическим шарниром O 1 связано с первым телом. На конце второго тела укреплен схват, в котором находится перемещаемый объект (груз). Будем предполагать, что линейные размеры схвата и груза много меньше длины второго тела манипулятора и при исследовании движения считать схват с грузом материальной точкой.
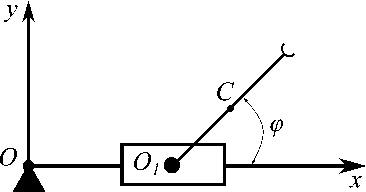
Рис. 1. Двухзвенный манипуляционный робот
Управление плоским движением манипулятора осуществляется при помощи момента M , приложенного ко второму телу, и горизонтальной силы F , приложенной к первому телу. Сила F и момент M создаются двумя независимыми приводами.
Кинетическая энергия определяется формулой:
T = ^( m 1 + m 2 ) x 2 — m 2 lie p sinp + ^ J^d 2 .
Потенциальная энергия определяется формулой:
П = — m 2 glsinp.
Здесь x — координата, определяющая поступательное перемещение точки O 1 первого тела; угол ϕ — угол поворота второго тела относительно первого тела; l — расстояние от оси шарнира O 1 до центра масс C второго тела со схватом и грузом; m 1 — масса первого тела; m 2 — масса второго тела со схватом и грузом; J — момент инерции второго тела со схватом и грузом относительно оси цилиндрического шарнира O 1 .
Функция Гамильтона имеет следующий вид:
H = H(x, y,p x ,p ^ ) =
Jp X + 2m 2 lp x p ^ siny + m s p ^ 2(Jm s — m 2 ^sin ^ y)
+ m 2 glsiny,
где m s = m i + m2 — масса первого и второго тела со схватом и грузом. Система канонических уравнений Гамильтона имеет вид:
Jpx + m2lsinypv . m2lsinypx + mspv px = F (t),
Jm s - m 2 2 l 2 sin 2 ϕ , ϕ Jm s - m 2 2 l 2 sin 2 ϕ ,
—m 2 lcosy^m 2 lsiny(Jp2 + m s p ^ ) + p x p ^ Jm s + m 2 l 2 sin 2 y))
-
P ^ (Jm s - m 2 l 2 sin 2 y) 2
— m 2 glcosy + M (t).
Задача управления состоит в нахождении импульсных законов изменения управляющей силы F (t) и управляющего момента M (t) из множества импульсных управлений (2)
F (t) = S 0 5(t) + S T T — t),
M (t) = S 2 0 5(t)+ S 2 T 5(T k — t), обеспечивающих приведение манипулятора из заданного начального положения x(0) = x o , y(0) = y o , rx(0) = 0, yb(0) = 0 в заданное конечное положение x(T k ) = x T > x o , y(T k ) = y T > y o , x^ (T k ) = 0, y)(T k ) = 0 за конечное время T k .
При отсутствии управлений каноническая система допускает два независимых первых интеграла. Интеграл энергии
H ( x,y,P x ,p v ) =
Jp X + 2m 2 lp x P v siny + m s P ^ 2( J m s — m 2 2 l 2 sin 2 y )
+ m 2 glsiny = h
и циклический интеграл px = ai.
Имеем два первых независимых интеграла: интеграл энергии и циклический интеграл. Эти интегралы находятся в инволюции и согласно теореме Лиувилля система канонических уравнений интегрируема.
Для нахождения полного интеграла уравнения Гамильтона — Якоби используем методику, изложенную в [2]. В результате получим
W (x, y, a 1 ,h) = (x + — cosy)a 1 + m s
+ у Jmnb
— m 2 l 2 sin 2 y )(2 m s ( h — m 2 glsiny ) — a 2 )
2 1 dϕ.
m s
Используя теорему Якоби, находим два дополнительных первых интеграла канонической системы уравнений m2l x +--cosy — ms
ar / 7
m s ϕ 0
Jm s - m 2 2 l 2 sin 2 ϕ 2m s (h — m 2 glsiny) —
a 2 1
dy = b i .
11 ϕ 0
Jm s - m 2 l 2 sin 2 ϕ
-—-----——dy = t + to.
2m s (h — m 2 glsiny) — a i
Пусть в начальный момент времени t = 0 свободная каноническая система имеет начальные условия x(0) = x o , y(0) = y o , p x (0) = p X , p ^ = p 0 ϕ . Тогда из начальных условий находим произвольные постоянные a 1 , b 1 , t 0 .
a i = p 0 , b i = x o +-- cosy o , t o = 0.
x m s
Из первого дополнительного интеграла находим уравнение траектории
ϕ Jms - m2l2sin2ϕ ms(xxo) + m2l(c°sy — C°8yo)= px ^ 2m-(h _ m2gUiny) _ (PX)2 dy.
Условие прохождения траектории движения через конечное положение имеет вид:
ϕT Jms - m2l2sin2ϕ m.txT—Xo)+m2«cosyT—co,yo) = px y^0 у 2ms(h — m2glsin., 2 dy.
Это уравнение неявно определяет p X = p X (h).
Если выполнено условие, то время движения груза до конечной точки определяется формулой:
T k
ϕ T
= Л., V
Jm s - m 2 2 l 2 sin 2 ϕ 2m s (h — m 2 glsiny) — (p X ) 2
dϕ.
Используя условие прохождения траектории через конечное положение, преобразуем формулу для нахождения T k . Формулу для закона движения груза по траектории можно преобразовать к виду:
T k = T k (h) =
1 p X (h)
m s (x T — x o ) + m 2 l(cosy T — cosy o ) .
Значения S10 , S1T , S20 , S2T в соответствии с теоремой 2 определяются следующими формулами so = IpXI = —sT , о (Jms — m2l2sin2^o)(2ms(h — m2glsin^o) — (pX)2) — S°m2lsin^o
S2 = , ms
S 2 T
^ (Jm s — m^sin^ T )(2m s (h — m 2 glsin^ T ) — (p X ) 2 ) — S 0 m 2 lsin^ T m s
При нахождении энергии, необходимой для перехода манипулятора из начального положения равновесия в конечное, используется формула (13), в результате получаем следующее значение энергии
E = E(h) = 2h — m 2 gl(sin^ o + svnp T ).
5 Результаты численного моделирования
В качестве численного примера рассмотрен случай следующих значений параметров системы: m i = 1, m 2 = 3, l = 1, J = 6, g = 9.81.
Перевод схвата необходимо произвести из начального положения xo = 1, ^0 = n/24, в конечное положение xT = 2, ^T = n/2.
Рассмотрены три задачи выбора оптимального значения параметра h.
Задача 1. Для заданных начального и конечного положений найти значение параметра h, которое удовлетворяет заданному условию ограничения затрат энергии E (h) < 50 и соответствует минимальному времени движения манипулятора по траектории:
T k = T k (h) = min T k (h).
h ∈ R
Задача 2. Для заданных начального и конечного положений найти значение параметра h, которое удовлетворяет заданному условию быстродействия T (h) < 2 и соответствует минимальным энергозатратам для перехода манипулятора по траектории:
E = E (h) = min E(h).
h ∈ R
Задача 3. Для заданных начального и конечного положений найти значение параметра h, которое минимизирует комбинированный функционал J(h), учитывающий и время движения манипулятора по траектории, и затраты энергии на это движение:
J(h) = min J(h) = min (20 T k (h) + E(h)). h ∈ R h ∈ R
Таблица 1. Результаты численного моделирования
|
№ |
h |
p X ( h ) |
T k ( h ) |
E ( h ) |
J ( h ) |
График |
|
1 |
41.636 |
2.034 |
0.504 |
50 |
60.08 |
Штрих-линия |
|
2 |
29.465 |
0.512 |
2 |
25.659 |
65.659 |
Штрих-пунктирная линия |
|
3 |
31.3447 |
1.215 |
0.8442 |
29.418 |
46.3 |
Сплошная линия |
Основные результаты представлены в таблице 1.
На рисунке 2 представлены начальное положение манипулятора (толстой линией) и конечное положения манипулятора (пунктирной линией).
На рисунке 3 представлена трактория движения схвата манипулятора в декартовой системе координат.
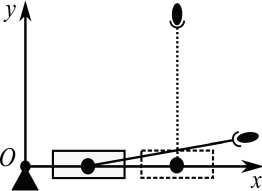
Рис. 2. Начальное и конечное положения манипулятора
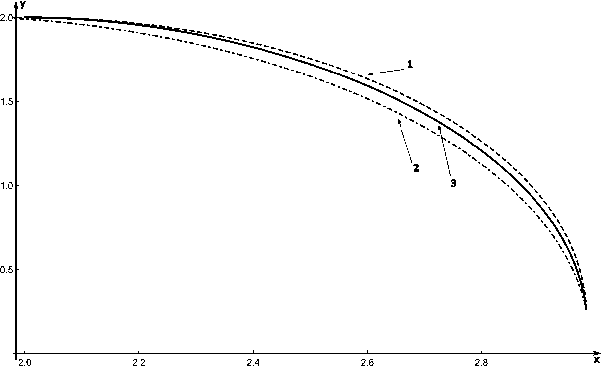
Рис. 3. Траектория движения схвата манипулятора
Заключение
Предложенный метод позволяет построить импульсные управления для многозвенного манипуляционного робота с идеальными стационарными связями. Данная методика была применена при построении импульсных управления для безынерционного [4] и инерционного [5]
двухзвенника, совершающего движение в горизонтальной плоскости. Переход к описанию движения двухзвенника в вертикальной плоскости усложняет задачу.
Список литературы Нахождение импульсных управлений для многозвенных манипуляционных роботов
- Маркеев А. П. Теоретическая механика. Москва: Наука, 1990. 416 с. EDN: TTDTZT
- Архангельский Ю. А. Аналитическая динамика твердого тела. Москва: Наука, 1977. 328 с.
- Раус Э. Дж. Динамика системы твердых тел. Москва: Наука, 1983. 463 с.
- Долгий Ю. Ф., Чупин И. А. Импульсные управления двухзвенным манипуляционным роботом // Известия Института математики и информатики Удмуртского государственного университета. 2021. № 57. С. 77-90. DOI: 10.35634/2226-3594-2021-57-02 EDN: GDUJRJ
- Dolgii Y., Chupin I. Impulse control of the inertial manipulation robot // Proceedings of 16th International Conference on Stability and Oscillations of Nonlinear Control Systems (Pyatnitsky's Conference). STAB 2022. Institute of Electrical and Electronics Engineers Inc. DOI: 10.1109/STAB54858.2022.9807496
