Наведение и управление космическим роботом при визуальной инспекции состояния геостационарного спутника

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович, Сомов Сергей Евгеньевич, Сомова Татьяна Евгеньевна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 2 т.22, 2020 года.
Бесплатный доступ
Рассматриваются вопросы наведения и управления космическим роботом при визуальной инспекции состояния информационного геостационарного спутника. В системе управления движением робота применяются двигательная установка с 8 реактивными двигателями при широтно-импульсной модуляции их тяги и силовой гироскопический кластер на основе 4 гиродинов с цифровым управлением. Приводятся численные результаты, демонстрирующие эффективность разработанных алгоритмов наведения и управления.
Космический робот, геостационарный спутник, мониторинг состояния, наведение, управление
Короткий адрес: https://sciup.org/148312633
IDR: 148312633 | УДК: 629.78 | DOI: 10.37313/1990-5378-2020-22-2-132-137
Guidance and control of a space robot during visual inspection of the geostationary satellite state
We are considering the problems on guidance and control for a space robot during visual checking the state of an information geostationary satellite. The robot motion control system uses a propulsion unit with 8 jet engines and pulse-width modulation of their thrust, and also a gyro moment cluster based on 4 gyrodines with digital control. Numerical results are presented that demonstrate the effectiveness of the developed guidance and control algorithms.
Текст научной статьи Наведение и управление космическим роботом при визуальной инспекции состояния геостационарного спутника
Информационные спутники на геостационарной орбите (ГСО) имеют потребную длительность службы до 25 лет при наличии технического обслуживания с помощью космических роботов-манипуляторов (КРМ), в частности дозаправки топливом их электрореактивных двигательных установок. Предшествующая статья авторов [1] в этом же выпуске журнала содержит выбор отечественных реактивных двигательных установок (РДУ) для выведения КРМ по комбинированной схеме на ГСО и электромеханических приводов системы управления движением (СУД) КРМ для его сближения с целью (геостационарным спутником) от расстояния 500 м до дальности 100 м на интервале времени t e [1637,2185] с, синтезированные алгоритмы наведения и управления, а также результаты нелинейного анализа динамики СУД при таком сближении.
В данной статье рассматривается маневрирование КРМ в окрестности цели на расстоянии 80-120 м при визуальной инспекции её состояния с последовательным наблюдением из 6 точек в порядке возрастания их номеров с зависанием в каждой точке относительно цели на 5 минут, рис. 1 a .
ПОСТАНОВКА ЗАДАЧИ
Модели движения КРМ, состав СУД, ис- пользуемые алгоритмы наведения и управления детально представлены в [1], поэтому здесь приводятся только необходимая информация.
Применяется геоцентрическая инерциальная система координат (ИСК) I е с началом в цен тре Земли Оф {•} = col(-), 0t
и общепринятые обозначения и °,"~ для векторов, матриц и
кватернионов, а также матрицы [a] i элементарного поворота вокруг i -ой оси на угол a , i = 1,2,3 = 1 ^ 3. Используются Гринвичская система координат (ГСК) G@, связанная с Землей, орбитальные системы координат (ОСК)
Or x 0 y 0 z 0 КРМ с началом в его полюсе Or и цели O t x t0 y t0 z t 0 с началом в её полюсе Ot , а также связанная с корпусом КРМ система координат (ССК) O r xyz .
Предполагается, что на борту КРМ имеется наблюдательный инструмент (телескоп), ось визирования которого параллельна оси O ry ССК робота, см. рис. 1. Как и в статье [1], приводами СУД являются: 1) РДУ на основе восьми реактив-
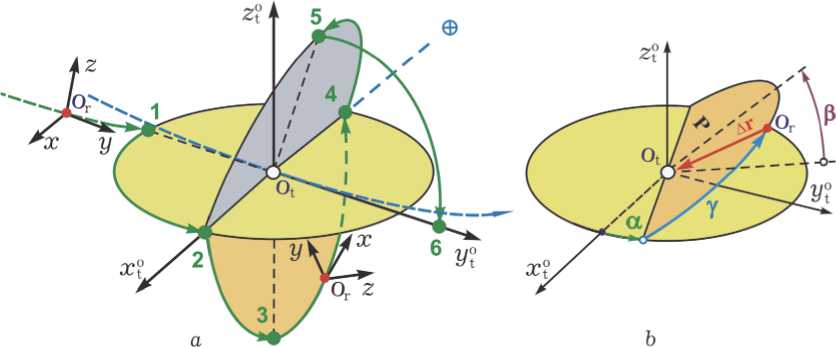
Рис. 1. Схема перелётов КРМ при визуальной инспекции состояния геостационарного спутника
ных двигателей по симметричной схеме при широтно-импульсной модуляции значений тяги 25 Н каждого двигателя с периодом T U = 4 с, что позволяет одновременно создавать векторы импульсов силы и момента произвольного направления в ССК робота; 2) силовой гироскопический кластер (СГК) на основе четырёх гиро-динов с собственным кинетическим моментом (КМ) h g = 100 Нмс и цифровым управлением с периодом Tu = 0.25 с.
Если считать КРМ твёрдым телом с массой m и тензором инерции J , то при стандартных обозначениях модель его пространственного движения в проекции на оси ССК O r xyz имеет вид r * + ® х r = v ; m ( v * + ю х v ) = P e + F d;
Л = Л о ю/2; J bo + ®x G = Mg + Me + Td.
Здесь кватернион Л = ( X0 , X ) с вектором X = { X i } представляет ориентацию КРМ в ИСК; G = J to + H является вектором КМ механической системы, где H - вектор кинетического момента СГК; векторы P e , M e и M g = — H * представляют соответственно управляющие силы РДУ, моменты РДУ и СГК, векторы F d и T d
-
- внешние возмущающие силы и моменты, а также используется символ ( • ) * локальной производной по времени. Применяемые дискретные алгоритмы широтно-импульсного и цифрового управления детально представлены в [1].
В статье решаются две задачи: 1) синтез алгоритмов наведения КРМ в процессе инспекционного облёта геостационарного спутника с последовательным наблюдением его состоя-
2185 2485 2885 31853585
|наблюдение 1| переход 1-2 I наблюдение 2] переход 2-3
300 400 300400
3585 3885 4285 45854925
I наблюдение 3 I переход 3-4 I наблюдение 41 переход 4-5
4985 5285 5685 5985
I наблюдение 5 I переход 5-6 I наблюдение 61
300 400 300
Рис. 2. Временная ди а грамма пе р елётов КР М и наблюдений состояния сп у тника
ния из 6 точек с заданных расстояний; 2) анализ динамики СУД робота с массой m ® 3000 кг при таком облёте.
ЗАКОНЫ НАВЕДЕНИЯ РОБОТА ПРИ ПОСЛЕДОВАТЕЛЬНОМ ОБЗОРЕ ЦЕЛИ
В ОСК цели перемещение КРМ между наблюдениями задаётся плоскостью P , положение которой назначается фиксированными углами а и р на рис. 1 b , и расположением полюса O r КРМ в этой плоскости, которое определяется углом у( t ) и модулем 5 ( t ) = A r ( t ) вектора s ( t ) = —A r ( t ) . рис. 1 b . Задача пространственного наведения КРМ состоит в программном расположении s p ( t ) = —A r p ( t ) полюса O r КРМ в плоскости P ОСК цели и в программной ориентации оси O ry по орту вектора A r p , когда ось O rz ССК робота направлена по нормали к плоскости перемещения его полюса O r .
Пусть номер j = 1 ^ 5 перелёта (перехода) между точками инспекции соответствует точке завершения предыдущего наблюдения, см. рис. 1 a. Временная диаграмма перелётов КРМ приведена на рис. 2, где переходы КРМ между точками наблюдения отмечены синим цветом, а участки наблюдения, где КРМ стабилизируется в ОСК цели, - зеленым цветом. В верхней части диаграммы указано текущее время, а в нижней части - длительности наблюдения. Здесь длительность j -го перелёта принята одинаковой Tj = 400 с V j = 1 ^ 5, также как и длительность 300 с (5 минут) наблюдения геостационарного спутника из каждой точки, см. рис. 1 a и 2.
Таблица 1. Параметры перелётов КРМ
|
j |
α j , град |
β j , град |
Y Р , град |
Y p , град |
s P , м |
s P , м |
|
1 |
0 |
0 |
- 90 |
0 |
100 |
100 |
|
2 |
0 |
- 90 |
0 |
90 |
100 |
100 |
|
3 |
0 |
- 90 |
90 |
180 |
100 |
100 |
|
4 |
0 |
70 |
180 |
90 |
100 |
80 |
|
5 |
90 |
90 |
70 |
0 |
80 |
120 |
Заданные кинематические параметры для имитации перелётов КРМ при последовательной визуальной инспекции состояния спутника на ГСО приведены в таб. 1.
При j -ом перелёте КРМ вектор его требуемого расположения s p (t) определяется углом Yj (t) в плоскости, заданной фиксированными углами aj и р j, и расстоянием sj (t) от цели. Угол Yj (t) изменяется от начального (initial) значения yjj = Y j (tij) до конечного (final) значения yP j = Yj (ti j + Tj), где Tj — длительность p j -го перелёта. При этом расстояние sj (t) изменяется от начального значения sij. = sj (tij) до конечного sp = sj (ti. + T.). На рис. 3 представлена пространственная программная траектория перелётов КРМ в ОСК цели, полученная в компьютерной среде MatLab.
Для каждого j -го перелёта столбец s p ( t ) координат центра масс КРМ с модулем s p ( t ) определяется в ОСК O t xt0yjz j цели с помощью ортогональной матрицы Q y = WWW t )] ; . При заданных краевых условиях
.,Р ~р • мР -мР -П- ^р -уР -о-Y i j , Y f j ; Y i j = Y i j = 0 ; Y f j = Y f j = 0;
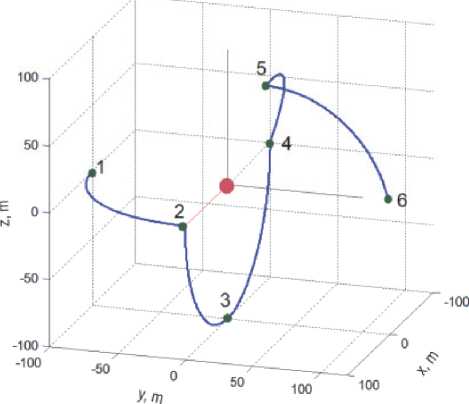
Рис. 3. Программная траектория перелётов КРМ движении, а также программных изменений кватерниона Лp, вектора модифицированных параметров Родрига с= {сi}, векторов угловой скорости top = {toj} и углового ускорения £p = {еj } робота.
Изменения вектора s p ( t ) = { s i ( t )} дальности полюса КРМ O r от цели и его модуля s j ( t ) приведены на рис. 4. Здесь легко убедиться, что наблюдение геостационарного спутника из пятой точки выполняется при дальности 80 м, а наблюдение из шестой точки – с расстояния 120 м.
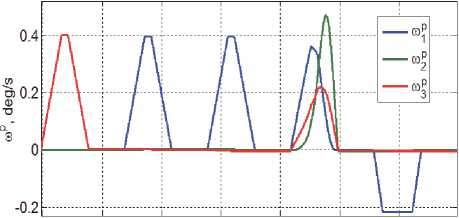
Рис. 5 представляет изменения вектора A v p = { A v j } программной скорости поступательного движения КРМ, где компоненты A v j этого вектора по оси O x ССК робота ( i = 1 ) отмечены синим цветом, по оси O ry ( i = 2 ) - зелёным и по оси O rz ( i = 3 ) - красным цветом. С применением такой же цветовой разметки на рис. 6 и 7 представлены изменения программных значений вектора модифицированных параметров Родрига ст = { сt } и вектора угловой скорости to p = { to p } .
АНАЛИЗ ТОЧНОСТИ СУД РОБОТАПРИ ОБЗОРЕ СОСТОЯНИЯ СПУТНИКА
Как и в [1], при анализе точности поступательного перемещения КРМ используется вектор рассогласования 5 A r ^ { 5 A r } = A r p ( t ) — A r ( t ) между программной разностью A r p ( t ) и фактической разностью A r ( t ) расположений полюсов цели O t и робота O r . При заданном в ИСК программном угловом движении КРМ (законе наведения) Л p ( t ), to p ( t ) погрешность ориентации КРМ определяется кватернионом E = ( e 0 , e ) = Л p ° Л , вектором Эйлера E = {e 0 , e } , где вектор
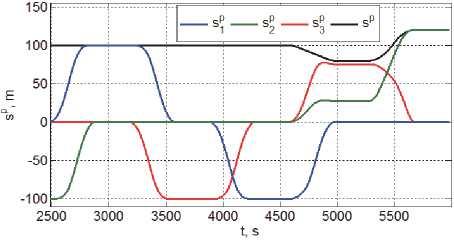
Рис. 4. Программная дальность КРМ от цели
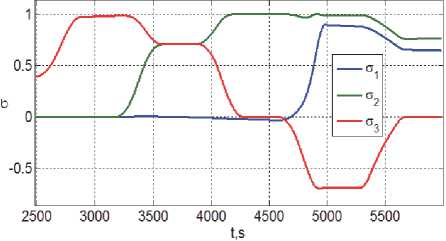
Рис. 6. Модифицированные параметры Родрига
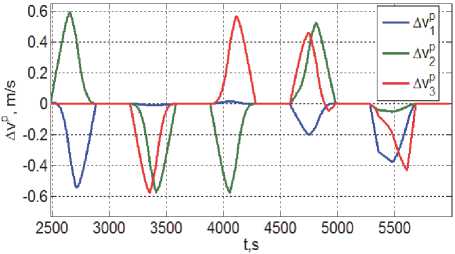
Рис. 5. Вектор программной линейной скорости
2500 3000 3500 4000 4500 5000 5500
t, s
Рис. 7. Вектор программной угловой скорости
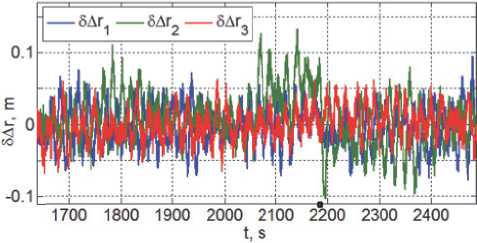
Рис. 8. Рассогласования в р асположе н ии КРМ
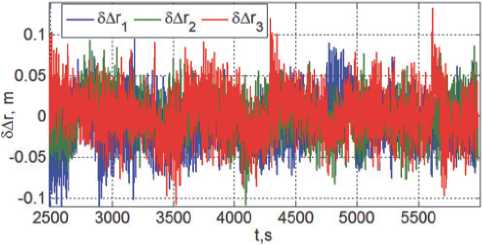
Рис. 10. Рассогласо в ания в расп о ложении КРМ
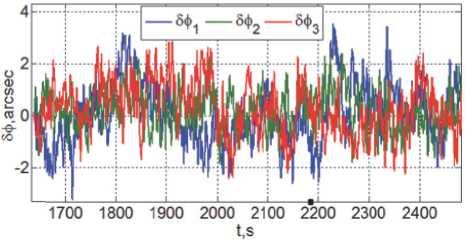
Рис. 9. Ошибки угловой с табилизац и и КРМ
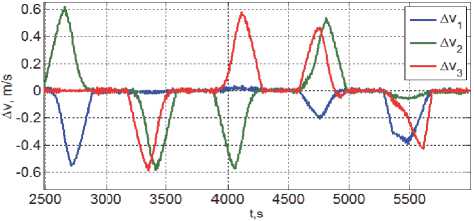
Рис. 11. Вектор ск о рости пере м ещения КРМ
e = { e i } , матрицей С е( Е ) = 1 3 - 2[ e x ] Q ‘ , где Q e = I 3 e 0 + [ e x ] и вектором ошибки ориентации 5 ф = {5ф i } = { 2 e 0 e i } , а погрешность стабилизации угловой скорости вычисляется по формуле 5 ® = { 5® i } = to — С е to p ( t ) .
На последующих рисунках кратко приводятся результаты нелинейного анализа точности системы управления движением КРМ, полученные методами компьютерной имитации.
На рис. 8 представлены рассогласования 5Аr в расположении КРМ сначала при сбли жении КРМ массой m = 3018 кг с геостационарным спутником с начальной дальности 500 м до расстояния 100 м на интервале времени t е [1637,2185] с длительностью 548 с, а затем в процессе наблюдения цели из первой точки в течение 300 секунд на интервале времени t е [2185,2485] с, см. временную диаграмму перелётов КРМ и наблюдений состояния спутника на рис. 2 и программную траекторию перелётов КРМ на рис. 3, а на рис. 9. приведены ошибки δφi угловой стабилизации КРМ на
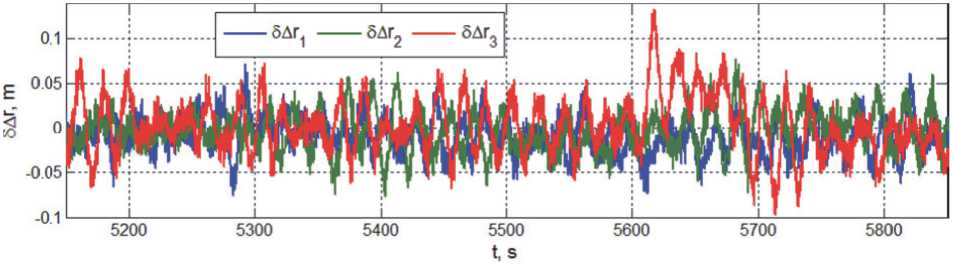
Рис. 12. Рассогласования в расположении КРМ при последнем перелёте и наблюдении
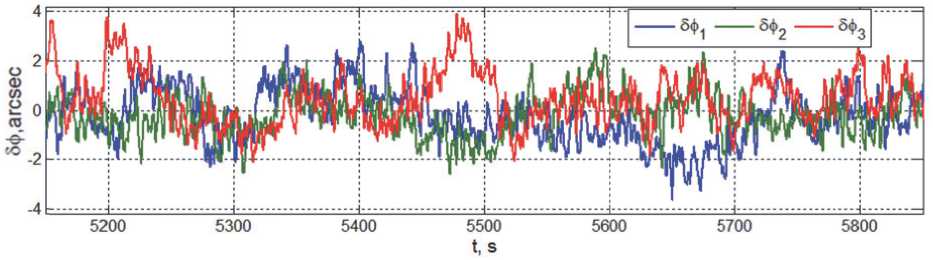
Рис. 13. Погрешности угловой стабилизации КРМ при последнем перелёте и наблюдении
интервале времени t е [1637,2485] с при выполнении тех же манёвров сближения и наблюдения. При этом момент времени t = 2185 с на рис. 8 и 9 отмечен точкой на оси абсцисс.
На рис. 10 и 11 представлены рассогласования в расположении КРМ и компоненты вектора A v = { A v i } фактической скорости его поступательного перемещения при перелётах КРМ и последовательном наблюдении состояния цели из точек 2 ^ 6 , см. также рис. 2 и 3.
Наконец, рис. 12 и 13 в удобном масштабе представляют рассогласования в расположении и погрешности угловой стабилизации КРМ при последнем перелёте и наблюдении состояния геостационарного спутника из шестой точки.
Из представленных результатов следует, что при наблюдениях состояния цели достигается точность не хуже 0.05 м по компонентам вектора расположения КРМ и не хуже 2 угл. сек по компонентам вектора погрешности его ориентации. Расчеты показывают, что на таких участках при частоте съемки 60 кадров/сек, фокусном расстоянии объектива 0.3 м и размере пикселя 9 мкм, изображение будет четким: смаз изображения составит не более 0.023 пикселя в любой точке кадра.
ЗАКЛЮЧЕНИЕ
Представлены разработанные алгоритмы наведения космического робота для облёта геостационарного спутника с последовательным наблюдением его состояния из 6 точек с задан- ного расстояния. В рамках принятого уровня моделирования КРМ выполнен анализ динамики системы управления движением робота при таком облёте, приведены численные результаты, демонстрирующие эффективность разработанных алгоритмов наведения и управления.
Отметим, что в алгоритмах широтно-импульсного управления реактивной двигательной установкой и цифрового управления силовом гироскопическим кластером применяются только позиционные векторные рассогласования, информация о рассогласованиях в скоростях поступательного и вращательного движений робота и геостационарного спутника не используется, этот факт значительно упрощает бортовую реализацию измерительных средств системы управления движением робота. Отмеченные алгоритмы подробно представлены в работах [2, 3].
Список литературы Наведение и управление космическим роботом при визуальной инспекции состояния геостационарного спутника
- Сомов Е.И., Бутырин С.А., Сомов С.Е., Сомова Т.Е. Вывод на орбиту и сближение космического робота с геостационарным спутником // Известия Самарского научного центра РАН. 2020. Том 22. № 2. С. 124 -131.
- Сомов Е.И., Бутырин С.А. Наведение и управление движением свободнолетающего робота при завершении сближения с пассивным объектом в дальнем космосе // Известия Самарского научного центра РАН. 2017. Том 19, № 4. С. 81-90.
- Somov Ye., Butyrin S., Somov S. Guidance, navigation and control of a free-flying robot during its rendezvous with a passive space vehicle // Mathematics in Engineering, Science and Aerospace. 2018. Vol. 9. No 3. P. 387-396.
