Наведение и управление свободнолетающим роботом при завершении сближения с пассивным объектом в дальнем космосе

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4-1 т.19, 2017 года.
Бесплатный доступ
Рассматривается задача пространственного наведения и управления космическим роботом-манипулятором при завершении его сближения с пассивным объектом в дальнем космосе. Представляются результаты компьютерной имитации и оценки потребных характеристик системы управления для прецизионной стабилизации движения свободнолетающего робота.
Космический робот-манипулятор, сближение с целью, наведение, управление
Короткий адрес: https://sciup.org/148205292
IDR: 148205292 | УДК: 629.78
Guidance and control of free-flying robot during completion of the rendezvous with a passive object in deep space
We have considered the problem on spatial guidance and control of a space robot-manipulator during completion of its rendezvous with a passive object in deep space. We present results of a computer simulation and estimations of the required characteristics of control system for precise motion stabilization of the free-flying robot.
Текст научной статьи Наведение и управление свободнолетающим роботом при завершении сближения с пассивным объектом в дальнем космосе
Разработка методов управления движением космических роботов-манипуляторов (КРМ), рис. 1, для механического захвата, транспортировки и сервисного обслуживания орбитальных пассивных космических объектов (ПКО) в условиях неопределенности и неполноты измерения состояния является актуальной научной проблемой. Решение данной проблемы позволит на регулярной основе продлевать сроки активного существования информационных спутников с уникальными техническими характеристиками и при необходимости перемещать такие спутники для технологической модернизации на борту орбитальной станции либо в наземных условиях. Здесь выделяются три ключевые задачи: 1) разработка бесконтактных методов идентификации кинематических параметров движения ПКО с помощью оптико-электронных камер и лазерных дальномеров КРМ; 2) разработка методов наведения и управления пространственным движением КРМ при завершении его сближения с ПКО; 3) подготовка к механическому захвату и исследование нелинейной динамики механического сцепления ПКО с КРМ. В обзорных статьях [1, 2] авторы провели анализ 55 научных работ и выделили проблемы теории систем управления движением свободнолетающих КМР. В статье [3] выполнен аналитический обор современных методов и технологий, связанных с кинематикой, динамикой, управлением и анализом воз можностей КРМ для пилотируемых и беспи-
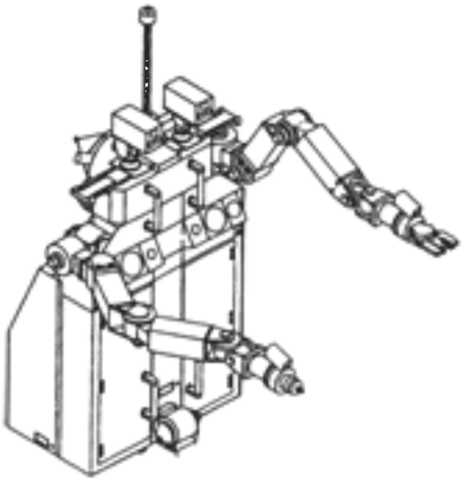
Рис. 1. Космический робот-манипулятор лотных орбитальных миссий обслуживания. В этой статье выполнен анализ 370 публикаций по указанной тематике и кратко представлен предложенный в монографии [4] многоэтапный процесс захвата и транспортировки цели (target).
При орбитальном движении ПКО в околоземном пространстве весьма непросто решение первых двух из указанных выше ключевых задач. Здесь идентификация кинематических параметров движения ПКО выполняется на основе информации, накопленной при последовательных наблюдениях за его движением с помощью бортовых оптико-электронных средств КРМ с различными ракурсами, и с учетом законов механики космического полета твердого тела в гравитационном поле Земли, Луны и Солнца, а также влияния сил солнечного давления, определяется положение центра масс ПКО, оценива- ются изменения углового положения и векторов скорости его поступательного и вращательного движений. Полученная в результате информация используется при синтезе закона наведения и формировании управления пространственным движением КРМ при завершении его сближения с целью. Целью данной статьи является разработка стратегии наведения и управления КРМ, а также оценка потребных ресурсов исполнительных органов его системы управления. Поэтому здесь рассматриваются первоочередные задачи наведения и управления движением КРМ при завершении его сближения с вращающимся ПКО в дальнем космосе, когда можно пренебречь внешними возмущениями, которые влияют на пространственные движения ПКО и КРМ. При этом регулярно используются инерциальная система координат (ИСК) и система координат, связанная с корпусом КРМ, которую обычно называют связанной системой координат (ССК), а также стандартные обозначения col(-) = {•}, HneQ = [•], (.)t, [ax] и о,~ для векторов, матриц и кватернионов.
ПРИВОДЫ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КРМ
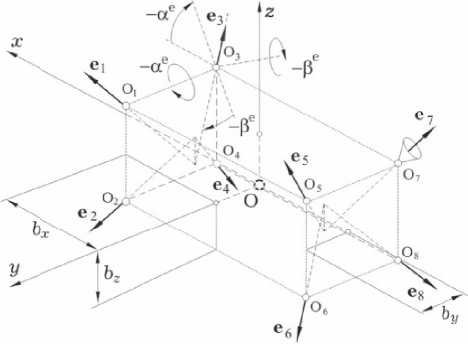
Рис. 2. Схема ДУ на основе 8 РД
p7 =
bx
— b y b z
’ р 8
^^^^^^^в
b
^^^^^^^в
x
b y
^^^^^^^в
b z
Пусть каждый РД имеет широтно-импульсную модуляцию (ШИМ) тяги, что описывается нелинейными непрерывно-дискретными соот-
Предполагается совпадение положений центра масс КРМ и полюса O в ССК O xyz . На рис. 2 представлена симметричная схема двигательной установки (ДУ) на основе 8 реактивных двигателей (РД). Орты e p , p = 1,...8 = 1 g 8 , осей сопел РД имеют в ССК представления в виде
ношениями P p ( t ) = pm PWM( t-T ^ .t , T ,v p , ) V t e [ tr , tr + 1) с периодом T и временным запаздыванием T u . Здесь v pr является входным сигналом и функции
PWM( t,tr, T m ,v pr ) ^
' signv pr 0
t e [ t r t r + T pr ) ; t e [ t r + T pr , t r +1 )’
T (^ ) = pr m
. sat(T U ,|v p
I)
|v pr 1 < T m
|v pr 1 > T m ’
e з
— e
e 4
,
где 5x = sinx, Cx = cosx, x = ae, Pe. Векторы
Р p , P = 1 + 8 , точек O p ра тяги РД в ССК (см. рис. 2) представляются
приложения векто-
столбцами
bx
bx
bx
Р1 =
b y
’ p 2 =
b y
’ p 3 =
b y
tr = rT tr+1 = tr + T. r e No ^ [0,1,2,3...), , ;
P m
- номинальное значение тяги, одинаковое для всех РД. В ССК вектор тяги p -го РД вычисляется по формуле p p ( t ) = — pp ( t ) e p , а векторы силы P e и момента M e ДУ - по соотношениям P e = S p p ( t ) = P = { Pv P 2, Д} и M e = S [ p p x ] p p ( t ) . Орты r p векторов p p вычисляются как r p =p p /р, где скаляр p = ( b x + b y + b 2) 1/2 является единым модулем точек O p приложения векторов тяги РД в ССК. При обозначениях
p(t) = РЧt)/Pm; m(t) = Me(t)/(Pmp}; тr = {тpr};
De = {[ep],[rp xep]}, tp = {pp,mp},
;
Р4 =
bz
b x
^^^^^^^B
b y
^^^^^^^^
b z
bz
bz
bx
bx
’ p 5 =
b y
bz
; Рб =
b y
bz
;
где векторы p p и m p представляют импульсы нормированных векторов сил p ( t ) и моментов m( t ) ДУ, заданные в ССК, принципиальная проблема заключается в решении векторного уравнения D e т r = t r ’, т r e R 8 , t r 1 e R 6 при условии 0 < т pr < T U V p = 1 ^ 8 относительно
компонентов вектора-столбца т r = { т pr } , когда прямоугольная матрица D e и вектор-столбец t p е R 6 заданы. При использовании псевдо-обратной матрицы ( D e) # ^ ( D e)t( D e( D e)t) - 1 закон распределения длительностей т pr тяги всех 8 РД на полуинтервале времени t е [ t r , t r + 1) с ШИМ их тяги с периодом T U имеет простую алгоритмическую форму
— r ^ : — pr} = (De)# tpg; тpr =: т pr - min (т pr), (1) if q = max (Tpr) > TU then Tpr = тpr-T,eTpr i q, а векторы тяги Pe и момента Me определяются формулами Pe(t) = Pmp(t) и Me(t) = Pmp m(t).
При цифровом управлении ДУ каждый РД имеет кусочно-постоянное значение тяги p p ( t ) е [0,P m ] V t е [ t r , t r + 1) с постоянным периодом T и временным запаздыванием T Zu , где P m > 0 - максимальное значение тяги, одинаковое для всех РД. При отсутствии квантования по уровню формирование такого цифрового управления описывается соотношением P p ( t ) = Zh( t -TA , TApr ) V t e [ tr , tr J, где функция y r ( t ) = Zh( t,t r , A X r ) = X r V t e [ t r , t r +J описывает процесс фиксации сигнала xr на полуинтервале [ t r , t r + 1) . Здесь при обозначениях p r = { ppr } - вектор-столбец, составленный из значений тяги всех 8 РД; t e = { P r e , м e } – столбец, составленный из заданных в ССК векторов силы P r и момента M r ДУ; D e = {[ e p ],[ p p x e p ]} – прямоугольная матрица, проблема заключается в решении уравнения D e p r = t r , p r е R 8 , t r е R 6 при условии 0 < ppr < P m V p = 1 ^ 8 относительно компонентов вектора-столбца p r = { ppr } . В этом варианте закон распределения цифровых значений тяги всех 8 РД на каждом полуинтервале времени t е [ t r , t r + 1) с периодом T U имеет такую алгоритмическую форму:
.. . .. .
Р г = { P pr } = (De) # t r ; P pr =: P pr - min ( pp r ), (2) if q = max (P pr ) > Pm then p pr = pp, / q •
Последняя строка в алгоритме (2) явно указывает на ограниченность управляющих векторов силы P e и момента M e двигательной установки, постоянных на полуинтервале времени t е [ t r , t r +1 ) .
Для управления ориентацией КРМ применяется силовой гироскопический кластер (СГК) четырех гиродинов (ГД). На рис. 3 представлена каноническая схема 2-SPE (система 2 ножничных пар – 2 Scissored Pair Ensemble), состоящая из двух пар ГД с ортами кинетических моментов (КМ) hp (вp ), p = 1 ^ 4, область вариации нормированного вектора КМ такого кластера h(P) = Shp(вp), где столбец P = {Pp}, и ее проекции на плоскости симметрии гироскопического базиса Oxgygzg.

Рис. 3. Схема СГК и область вариации его КМ
Все внутренние сингулярные состояния схемы 2-SPE являются проходимыми [5], применяемый [6] явный аналитический закон настройки СГК (распределения трехмерного вектора его управляющего момента M g между четырьмя ГД) позволяет исключить избыточность данного кластера с вектором кинетического момента H = h g h ( P ) , где h g - одинаковое для всех четырех ГД постоянное значение модуля собственного КМ. При цифровом управлении “ I ( t ) = {^ рк ( t )} с периодом T , где u^( t ) = u^ V t е [ tk , tk + 1 ) , tk + 1 = tk + T и k е N o , СГК формирует управляющий момент ■
M g ( t ) = - h g A h ( P ( t ) u g ( t ) ; P ( t ) = u k ( t ) , (3) где прямоугольная матрица A h ( P ) = d h ( P ) /3P .
МОДЕЛИ ДВИЖЕНИЯ И ПОСТАНОВКА ЗАДАЧИ
Пусть в ССК, вращающейся относительно ИСК c вектором угловой скорости to (t) ^ {to i(t)} , i = 1 ^3, задан вектор a(t) = {ai(t)}. В ИСК этот вектор отображается в виде а'(t) = {ai(t)}. Угловое положение ССК относительно ИСК определяется кватернионом Л = <Хо,Х) , X = {XJ , который изменяется согласно кинематическому уравнению Л = Л ° ю/2 . Далее применяется также вектор модифицированных параметров Родрига (МПР) О = {оi} = e 1!(Ф / 4) с обозначениями орта Эйлера e и угла Ф собственного поворота. Вектор о взаимно-однозначно связан с кватернионом Л прямыми О = X/ (1+ Х0) и обратными X 0 = (1 -О 2)/(1 + О2), Х = 2о /(1 + о2) соотношениями. Отображения вектора a(t) в ССК и a'(t) в ИСК связаны соотношениями a(t) = Л(t) ° a'(t) ° Л(t) и a' (t) = Л(t) ° a(t) ° Л(t), а производные по вре- мени этих отображений – классической формулой Эйлера a I (t) = d a I / dt = a* (t) + to(t) x a(t) для дифференцирования вектора в подвижной системе координат, где a*(t) = d a / d t является локальной производной вектора a(t) по времени в ССК.
Будем считать, что КРМ массой m оснащён двигательной установкой на основе 8 РД, которая создает только вектор силы P = { Pt } , и СГК на основе 4 ГД с вектором управляющего момента M g = {Mg} . Предполагая отсутствие всех внешних возмущений в дальнем космосе, модель пространственного движения КРМ при отображении на оси ССК принимается в виде
Г , * + tox r r = V r ; v , + to x v r = w , (4)
Л = Л о ю/2 ; J to । ШХ G 0 = M g . (5)
Здесь уравнения (4) с векторами положения r r и скорости v r описывают поступательное движение КРМ ( robot , нижний индекс r ), где вектор w = {w i } = P /m является управляющим ускорением, а уравнения (5) представляют управляемое вращательное движение КРМ с тензором инерции J , где G 0 = J to + H является вектором кинетического момента системы твердых тел.
Будет для простоты считать, что в ИСК поступательное движение ПКО с векторами положения r t 1 и скорости v | ( target , нижний индекс t ) является прямолинейным и равномерным, а его вращательное движение происходит вокруг фиксированного в ИСК орта e t ω вектора угловой скорости. В ССК векторы дальности Δ r до цели и рассогласования Δ v между скоростями КРМ и ПКО вычисляются по соотношениям Δ r = r t - r r и Δ v = v t - v r соответственно.
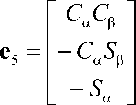
Завершение сближения КРМ с ПКО начинается при дальности Ari ~ 500 м, когда КРМ располагается внутри конуса с началом в центре масс ПКО, осью симметрии по отрицательному направлению орта скорости vt цели и углом полу-раствора 60 град. Задача состоит в синтезе законов пространственного наведения и управления движением КРМ, при которых робот за заданное время сближается с целью до дальности Arf « 30 м, когда орт ex его бортовой видеока-ω меры становится параллельным орту et вектора угловой скорости ПКО, и стабилизации такого положения КРМ относительно подвижной цели с точностью ® 0.3 м. Последующие действия робота-манипулятора (разведение телескопических «рук», финальное сближение с ПКО при одновременной «закрутке» относительно орта ex для синхронизации вращений корпуса КРМ и цели, зависание с вращением и др.) связаны с третьей ключевой задачей захвата ПКО и здесь не рассматриваются.
ЗАКОНЫ НАВЕДЕНИЯ
В ИСК модель (4) поступательного движения КРМ принимает простой классический вид r,= v,; V, = w1, (6)
где вектор ускорения w 1 = w ’ ( t ) = Л ( t ) о w о Л ( t ) представлен в ИСК с помощью кватерниона Л ( t ) . При отсутствии вращения ( to = 0 ) ориентация КРМ в ИСК определяется постоянным кватернионом Λ ∗ , модели движения (4) и (6) совпадают и вектор ускорения w 1 = Л , о w о Л , определяется в ССК, которая имеет фиксированное угловое положение в исходной ИСК, и, следовательно, по существу является локальной ИСК, развернутой относительно исходной.
С целью упрощения реализации требуемого вектора ускорения w с помощью ДУ в ССК принимается следующая стратегия построения законов наведения КРМ, состоящая из трех этапов: 1) разгон робота с постоянным вектором линейного ускорения w в ССК при фиксированной ориентации КРМ в исходной ИСК в процессе его поступательного движения; 2) прямолинейное равномерное движение центра масс КРМ с одновременным разворотом его корпуса для ориентации орта e x бортовой видеокамеры в ИСК параллельно известному орту e t ω вектора угловой скорости ПКО; 3) поступательное движение центра масс КРМ в локальной ИСК по траектории векторного сплайна соответствующего порядка с точным выполнением заданных краевых условий.
Синтез закона пространственного углового наведения КРМ (поворотного маневра) на некотором интервале времени t е [ t i p , t p ] с заданными краевыми условиями
Л( 1 1 p ) = Л _ ; to( 1 1 p ) = to _ ; e( t p ) = e _ ; (7)
Л(tf) = Лf; to(tf) = tof; e(tf) = ef; e(tf) = ef выполняется при ограничениях на модули векторов его угловой скорости to (t), углового ускорения £ (t) и производной £ (t) по времени. При балансе системы управления КРМ по вектору КМ G0 с условием G0 = 0 модель динамики его углового движения принимает вид to = £ с вектором углового ускорения £ = J-1Mg, а модель углового движения (5) – кинематическое представление тЛ = Л о to /2; (О = £; £ = £*= v. (8)
Разработанный закон углового наведения КРМ основывается на необходимом и достаточном условии разрешимости классической задачи Дарбу. Здесь решение представляется как результат сложения трех одновременно происходящих элементарных поворотов «вло- женных» базисов Ek вокруг ортов ek, k = 1 ^ 3 осей Эйлера, положение которых определяется по краевым условиям (7) модели (8). При этом искомый кватернион Л(t) определяется произведением Л (t) = Л i о Л1( t) о Л 2( t) о Л з( t), где Лk (t) = (cos(фk (t)/2), ek sin(фk (tУ2)), Функция фk (t) определяет угол k -го поворота, k = 1 ^ 3. В силу неподвижности орта ek в базисе Ek-1 имеем соотношения to k(t) = фk (t)ek , 6k(t) = фk(t)ek, 6*k (t) = 6k (t) =фk (t)ek. Введем обозначения to(k\ £(k), £(k), k = 1 ^ 3 векторов to, £ и £ в базисе Ek, оператор aw = ф(аk-i,Лk ) = Лk о ak-i о Лk преобразования вектора ak-1 из базиса Ek-1 в базис Ek и назначим to 1(t) = ф 1(t)е 1, £ 1(t) = ф 1(t)е 1 и £ 1(t) = ф1(t)е 1. Векторы to, £ и £*=£ в ССК определяются значениями этих же векторов в базисе E3, которые формируются по рекуррентным формулам, k = 2,3 :
to(k) =ФГю Л V £(k) = Ф(£ Л V tok-1 Ф(tok—1,лk ^ьk—1 ф(£k—1,Лk),
£k = ф(£k_1, Лk); to(k) = to + tok;
( k ) — р( k ) ( k ) ( k ) _ р( k ) I р I
£ = £k-1 + £к + tok-1 X tok ; £ = £k-1 + £k +
+ to(^ X £t + ^ + to(^ Xtok)Xtok .
k 1 k k 1 k 1 k k
.
В результате при назначении набора скалярных сплайнов ф k ( t ) по явным аналитическим соотношениям получаются векторные функции to ( t ) = to (3) ( t ) , £ ( t ) = £ (3) ( t ) и £ * ( t ) = £ ( t ) = £ (3) ( t ) .
Пусть кватернион Л * = ( 1 0 , X * ) = Л i о Л f имеет орт оси Эйлера e 3 = X * / sin( ф * /2) третьего поворота, где угол ф * = 2arccos( X 0 ) . Для 1-го и 2-го поворотов позиционные краевые условия принимаются в виде Л 1 ( t ip ) = Л 1 ( t f ) = 1 , Л 2 ( t i p ) = Л 2 ( t f ) = 1 , а для 3-го поворота назначаются как
Лз(tip) = 1, Лз(tfp) = (cos(фf/2),e3 sin(ф3/2)), где ф!, = ф* и 1 - единичный кватернион. Орт e 1 оси Эйлера 1-го поворота назначается из условия его ортогональности орту e3, а орт e2 = e3 х e1. Векторы to (t), е(t), 6* (t) = 6(t) представляются в аналитическом виде при задании сплайнов ф k(t) различных порядков с использованием в общем случае трех участков заданного интервала ПМ [7]: 1) участок разгона с оптимизацией по быстродействию при ограничениях, где КРМ из заданных краевых условий на левом конце траектории переводится на движение с постоянным вектором угловой скорости по орту e3; 2) участок движения с указанным вектором угловой скорости по орту e3; 3) завершающий участок движения КРМ с гарантированным выполнением заданных краевых условий на правом конце траектории при использовании сплайнов 6-го порядка и соотношений (9). При этом все параметры скалярных сплайнов ф k (t) вычисляются по явным аналитическим соотношениям.
ЗАКОНЫ УПРАВЛЕНИЯ
Пусть задан закон углового наведения КРМ Л p ( t ), to p ( t ), (b p ( t ) = £ p ( t ) в ИСК. Кватерниону E = ( e 0, е ) = Л p ° Л с вектором e = { e i } соответствует вектор параметров Эйлера E = { e o , e } и матрица угловой погрешности C e = I 3 - 2[ e x ] Q e , где Q e = 1 3 e 0 + [ e x ] . После дискретной фильтрации измеренных с периодом Tq значений вектора углового рассогласования 6 l =- 2 e 0 l e l , l e N o , формируются значения вектора 6 k , k e N o , цифрового закона управления СГК с периодом Tu :
gk+1 = Bgk + C£k; mk = Kgk + P£k;
Mk = tok X G: + J(Ck £ p + [Cktop X]to k + mk).
Здесь Ср = Ce(E), G0 = J to H и ис- k k k kk пользуются диагональные матрицы K, B, С и P. Далее вектор Mg с помощью явного закона распределения команд между 4 ГД «пересчитывается» в столбец uk = {ugp } сигналов управления ГД, которые фиксируются на полуинтервалах цифрового управления СГК с периодом Tu для формирования его управляющего момента Mk (t) (3).
При законе наведения A r p ( t ), A v p ( t ), w p ( t ) в поступательном движении КРМ выполняется фильтрации измеренных с периодом Tp значений вектора позиционного рассогласования 6 s = ( A r S - A r s ) , s e N o , и с периодом T U формируются значения вектора 6 f , r e N o , которые применяются в законе управления вектором P тяги двигательной установки
gk+1 = Bg k + C£ I;w k = Kg k+P£ k;
Pk = {Р»} ^ Pk = m(wp + w k).
Далее вектор P k тяги ДУ распределяется между 8 реактивными двигателями по соотношениям (1) либо (2) при их широтно-импульсном или цифровом управлении с периодом T U соответственно.
РЕЗУЛЬТАТЫ ИМИТАЦИИ
При компьютерной имитации рассматривался космический робот-манипулятор с массой m = 1000 кг и тензором инерции J = diag{812; 587; 910} кг м2. Было принято,
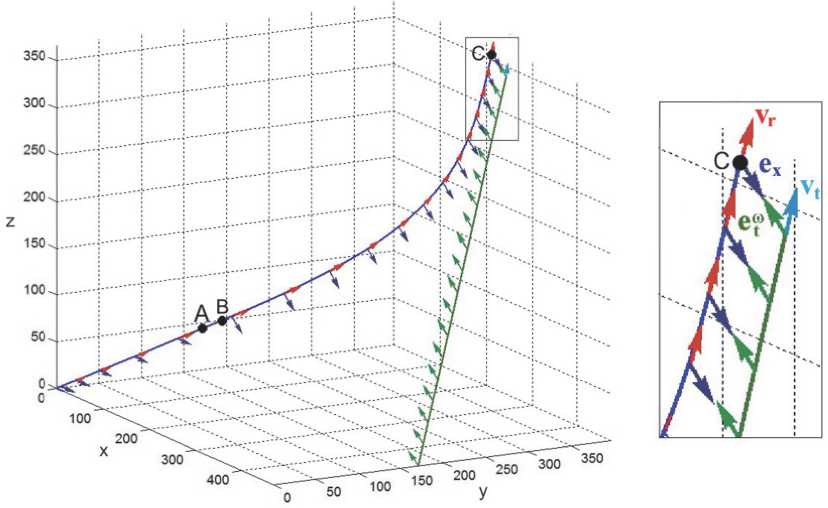
Рис. 4. Сцена пространственного сближения КРМ (синий цвет) с ПКО (зеленый цвет)
что при управлении с периодом T = 4 с каждый из 8 РД в составе ДУ имеет максимальное значение тяги Pm = 0.5 Н, расположение РД в ССК определяется плечами b = 1 м, b = 0.7 м, xy bz = 0.6 м и углами их установки ae = 35.25 град и вe = 45 град, см. рис. 2. При этом максимальная тяга ДУ по каждой из осей ССК одинакова и составляет 1.15 Н. Каждый из 4 ГД в составе СГК (см. рис. 3) имеет модуль собственного КМ hg = 30 Нмс и период цифрового управления Tu = 0.25 с. Пусть в момент времени t = ti = 0 КРМ неподвижен в ИСК (rr (ti) = 0, vr (ti) = 0) и его ССК совпадает с ИСК (Л(ti) = 1, to (ti) = 0 ), орт направления на цель c(ti) = {Cф, Sф ,0} при ф = 20 град и начальная дальность до цели Ar(ti) = Ari = 500 м, рис. 4. Поступательное движение цели в ИСК происходит с постоянным вектором скорости vt = {-0.05, 0.05, 0.075} м/с и ПКО вращается в ИСК вокруг орта e^= {-0.608, - 0.228, 0.760} . В момент времени t = tf = 4250 с («1.2 ч) требуется обеспечить сближение КРМ с целью при заданной дальности Ar(tf) = Arf = 30 м и параллельности орта ex орту eto, а также последующую стабилизацию такого положения КРМ относительно ПКО с точностью « 0.1 м. В соответствии с описанной стратегией выполнен синтез закона наведения КРМ с 3 этапами:
-
1) при t е [0,1420) с производится разгон робота с постоянным вектором ускорения w в ССК, в результате достигаемая им позиция представлена точкой A на рис. 4;
-
2) при t е [1420,1520) с КРМ совершает
равномерное прямолинейное движение с одновременным разворотом его корпуса для ориентации орта e x параллельно орту e to , достигаемая им позиция представлена точкой B на рис. 4, а закон углового наведения - на рис. 5, где 8 = 8 p ( t ) , to = to p ( t ) и G = Q p ( t ) ;
-
3) при t е [1520,4250) с КРМ выполняет поступательное движение по траектории векторного сплайна шестого порядка с точным выполнением краевых условий A r( t f) = 30 м, A v( t f) = 0 и w( t f) = 0 в точке C на рис. 4.
Закон наведения КРМ в поступательном движении с разворотом ССК представлен на рис. 6, где A r = A r p ( t ) , A v = A v p ( t ) , w = w p ( t ) .
На интервале времени t е [4250,5000] с дополнительно предъявляется требование стабилизации положения КРМ относительно ПКО с точностью ® 0.3 м. Отметим, что на рис. 5 и рис. 6 черным цветом отмечены модули соответствующих векторных функций.
Будем считать, что измерение ориентации КРМ выполняется астроинерциальной системой определения углового положения (СОУП), погрешности выходных дискретных сигналов СОУП с периодом T q = 0.125 с содержат центрированный гауссовский шум со среднеквадратичным отклонением (СКО) a a = 1 угл. сек и после дискретной фильтрации измеренных значений вектора углового рассогласования формируются значения вектора 8\ в цифровом законе управления СГК (10) с периодом Tu = 0.25 с. Как показано в [8 -10], для синтезированного закона углового наведения космического аппарата с инерционными параметрами, соответствующими КРМ, достигается точность ста-
Рис. 5. Закон углового наведения КРМ
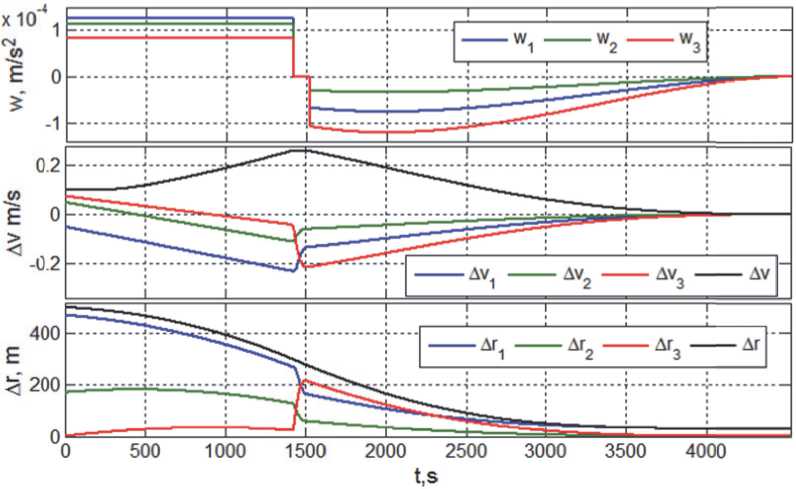
Рис. 6. Закон наведения КРМ в поступательном движении с разворотом его корпуса
билизации не хуже нескольких угловых секунд, что вполне достаточно.
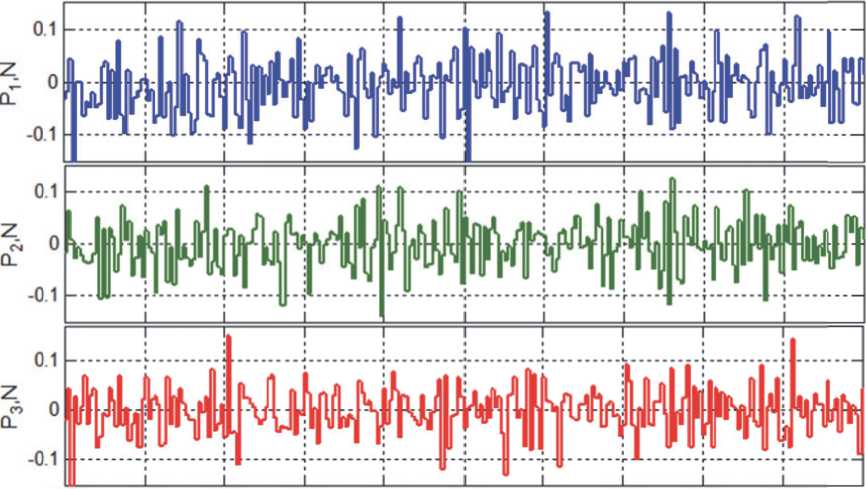
Пусть дальность до цели измеряется лазерными дальномерами с периодом Tp = 1 с. Для оценки точности стабилизации закона наведения КРМ в поступательном движении предположим, что СКО погрешности измерения дальности оb = 0.05 м при Ar(t) > 300 м и по завершению разворота корпуса КРМ при Ar(t) < 300 м СКО такой погрешности измерения оb = 0.01 м. Погрешности стабилизации дальности ЗА ri при реализации указанного закона наведения, полученные при компьютерной имитации, представлены на рис. 7, а на рис. 8 приводятся изменения компонен- тов Pi вектора тяги ДУ при цифровом управлении с дискретностью по уровню de = 0.01 Н. На рис. 9 – 11 детально представлены изменения компонентов вектора погрешности дальности и вектора тяги ДУ, а также тяги всех восьми РД при завершении сближения и стабилизации.
При широтно-импульсном управлении ДУ с ШИМ тяги каждого из 8 РД важное значение имеет параметр T m модуляционной характеристики t pr ( T m ) , который определяет минимальный импульс тяги РД IP pr = T m Pm на полуинтервале времени t е [ t r , t r +1 ) , t r +i = t r + T U . При T = 4 с, Tm = 0.25 с и Pm = 0.5 Н минимальный импульс тяги РД принимает значение IP pr = 0.125
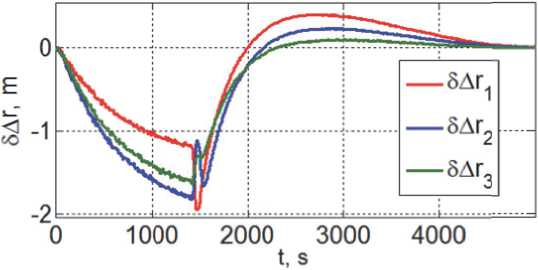
Рис. 7. Погрешности стабилизации дальности
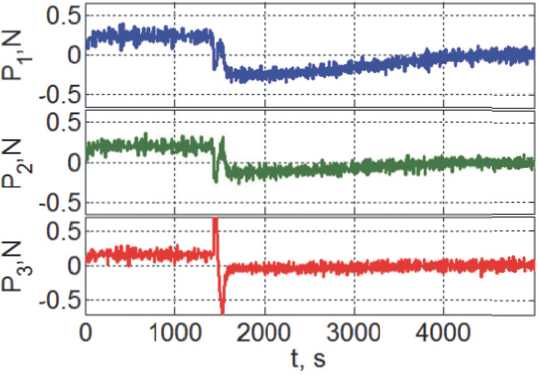
Рис. 8. Компоненты вектора тяги ДУ
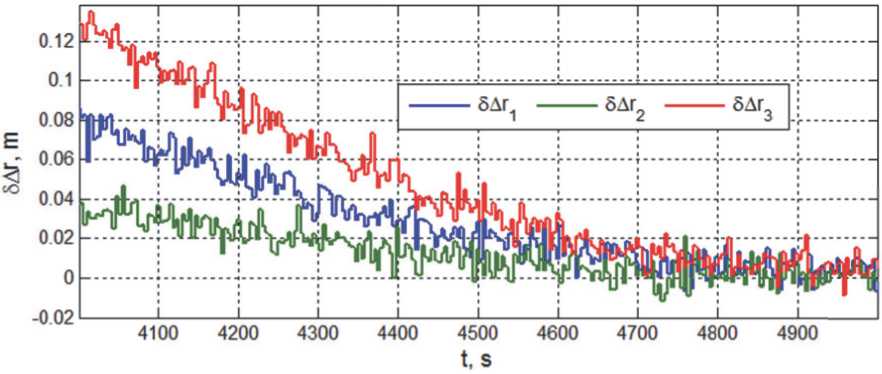
Рис. 9. Изменения погрешностей дальности при завершении сближения и стабилизации
Нс. С другой стороны, такому минимальному импульсу тяги при цифровом управлении РД соответствует расчетная дискретность квантования его тяги по уровню dе = IPpr /TU = 0.03125 Н. Выполненная компьютерная имитация показала близость значений погрешности стабилизации дальности при реализации синтезированного закона наведения КРМ как при широтно-импульсном управлении реактивными двигателями с параметрами TU = 4 с, тт = 0.25 с и Pm = 0.5 Н, так и при цифровом управлении с дискретностью de = 0,03 Н квантования их тяги по уровню. В обоих вариантах на интервале времени t е [4250,5000] с система управления движением КРМ обеспечивает стабилизацию его положения относительно пассивного космического объекта с точностью не хуже 0.3 м.
ЗАКЛЮЧЕНИЕ
Разработана стратегия пространственного наведения и управления движением КРМ, апробированная в первоочередной задаче заверше-
4000 4100 4200 4300 4400 4500 4600 4700 4800 4900
t, S
Рис. 10. Изменения компонентов вектора тяги ДУ при завершении сближения и стабилизации
0.1
О 1 L........!.........J..........!..........L.........!.........J..........I..........I.........!.........
^ ПЫ#МЫ1^^
, 01L........!.........J.........|..... r-!.........J.........1..... -I.........!........-I
, 0.11-........(.........J..........!..........L.........}.........J..........!..........1.........1.........
^ nj/lMi4lM^>^^
, 0.11—......}.........J-........4......... 1.........).........J..... L 1.........
" o wll^dA|#!lMklil|r^^
4000 4100 4200 4300 4400 4500 4600 4700 4800 4900
t, S
Рис. 11. Изменения тяги восьми РД при завершении сближения и стабилизации ния сближения свободнолетающего робота с вращающимся пассивным объектом (целью) в дальнем космосе, когда можно пренебречь внешними возмущениями. Представлены создан- ные законы наведения и дискретные алгоритмы управления движением, а также результаты компьютерной имитации процессов при завершении сближения КРМ с целью и последующей стабилизации его положения относительно подвижного ПКО. Приведены оценки потребных ресурсов системы управления КРМ в отношении характеристик измерительных подсистем и исполнительных органов – минимально-избыточного кластера силовых гироскопов (гиродинов) с цифровым управлением и двигательной установки на основе восьми реактивных двигателей малой тяги как с широтно-импульсным, так и цифровым управлением, при которых обеспечивается требуемая точность системы управления движением робота-манипулятора.
Список литературы Наведение и управление свободнолетающим роботом при завершении сближения с пассивным объектом в дальнем космосе
- Рутковский В.Ю., Суханов В.М., Глумов В.М. Некоторые задачи управления свободнолетающими космическими манипуляционными роботами. I//Мехатроника, автоматизация, управление. 2010. № 10. С. 52-59.
- Рутковский В.Ю., Суханов В.М., Глумов В.М. Некоторые задачи управления свободнолетающими космическими манипуляционными роботами. II//Мехатроника, автоматизация, управление. 2010. № 12. С. 54-65.
- Flores-Abad A., Ma O., Pham K., Ulrich S. A review of space robotics technologies for on-orbit servicing//Progress in Aerospace Sciences. 2014. Vol. 68. P. 1-26.
- Fehse W. Automated rendezvous and docking of spacecraft. Cambridge University Press. 2003. Vol. 16. 495 p.
- Сомов Е.И. Анализ сингулярных состояний и синтез явных законов настройки гирокомплексов кратных схем//Гироскопия и навигация. 2013. № 1(80). С. 134-148.
- Somov Ye.I., Butyrin S.A., Sorokin A.V., Platonov V.N. Steering the spacecraft control moment gyroscope clusters//Proceedings of 10th Saint-Petersburg International Conference on Integrated Navigation Systems. 2003. P. 403-419.
- Somov Ye., Butyrin S., Somova T. Synthesis of the vector spline guidance laws for a land-survey satellite at scanning observation and rotational maneuvers//Proceedings of International Conference "Stability and Oscillations of Nonlinear Control Systems". Moscow. 2016. P. 1-4.
- Сомов Е.И. Аналитический синтез программного гиросилового управления свободнолетающим космическим роботом//Проблемы управления. 2006. № 6. С. 72-78.
- Somov Ye. Guidance, navigation and control of information satellites: Methods for modeling, synthesis and nonlinear analysis//Mathematics in Engineering, Science and Aerospace. 2016. Vol. 7, no. 2. P. 223-248.
- Somov Ye., Butyrin S., Somov S. Attitude guidance, navigation and robust control of an agile land-survey satellite//Proceedings of 8th International Conference on Recent Advances in Space Technologies. 2017. P. 443-448.
