Навигация пешехода с использованием бесплатформенной инерциальной навигационной системы (БИНС), установленной на стопе
, установленной на стопе")
Автор: Болотин Ю.В., Фатехрад М.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (67) т.19, 2015 года.
Бесплатный доступ
Целью работы является исследование метода определения местоположения пешехода в пространстве с использованием бесплатформенной инерциальной навигационной системы (БИНС) на микроэлектронных механических сенсорах. Данный метод эффективен для применения в помещениях и в других местах, где отсутствует сигнал GPS. Координаты вычисляются интегрированием модельных уравнений БИНС. Основная проблема метода - «уход» координат из-за низкой точности используемых в БИНС микромеханических акселерометров и датчиков угловой скорости. Чтобы компенсировать накопление ошибок, метод интегрирования дополняется технологией коррекции по нулевой скорости ( zero velocity update ). Для этого БИНС крепится на стопе. Движение стопы можно разделить на две фазы: фаза опоры и фаза переноса. На фазе опоры, где БИНС считается неподвижной, можно уточнить координаты и ориентацию, используя информацию о равенстве нулю линейной скорости чувствительной массы БИНС. Особенностью данной работы является применение при коррекции «сигма-точечного» (« unscented ») варианта фильтра Калмана, что способствует повышению точности при выходе ошибок навигации из линейной зоны. Приведены результаты моделирования и обработки экспериментов. Траектория стопы в имитационной модели и в экспериментах представляет собой квадрат. В экспериментах используется блок инерциальных датчиков ADIS 16405 производства компании Analog Devices. Результаты можно оценить как обнадеживающие. Возможно, использование описанной технологии позволит строить кинограммы движения стопы человека без использования системы видеоанализа.
Навигация пешехода, бесплатформенные инерциальные навигационные системы, коррекция по нулевой скорости
Короткий адрес: https://sciup.org/146216162
IDR: 146216162 | УДК: 531.391:612.76
Текст научной статьи Навигация пешехода с использованием бесплатформенной инерциальной навигационной системы (БИНС), установленной на стопе
Задача навигации пешехода с помощью бесплатформенных инерциальных навигационных систем (БИНС) в настоящее время активно исследуется [5, 6]. Данный метод эффективен для применения в помещениях и в местах, где отсутствует сигнал GPS . Основная проблема метода – «уход» координат из-за низкой точности используемых микроэлектронных механических сенсоров. Поэтому при навигации необходима дополнительная коррекция, например, с применением магнитометров, сигналов Wi-Fi , и т.п. Целью данной работы является исследование метода определения местоположения пешехода в пространстве с использованием БИНС, установленной на
Болотин Юрий Владимирович, д.ф.-м.н., профессор кафедры прикладной механики и управления, Москва
Фатехрад Мохаммад, магистрант кафедры прикладной механики и управления, Москва стопе. Координаты вычисляются интегрированием модельных уравнений. Чтобы компенсировать накопление ошибок, в опоре проводится коррекция с использованием информации о нулевой скорости стопы в фазе опоры. Определение фазы опоры – самостоятельная задача, требующая внимания. Особенностью данной работы в сравнении с [5, 6] является применение коррекции для коррекции сигма-точечного алгоритма фильтра Калмана – в английском варианте Unscented Kalman Filter (UKF) [7], что способствует повышению точности при выходе ошибок навигации из линейной зоны [2].
Постановка задачи
Пусть БИНС крепится на теле человека и с ее помощью требуется определить его координаты. Метод инерциальной навигации [2] используется там, где GPS не работает, например, в помещении. Для низкоточной БИНС свойственны большие ошибки в интегрировании модельных уравнений [2]; чтобы уменьшить ошибки, предлагается использовать специальный алгоритм коррекции. Для этого БИНС крепится на стопе. Движение стопы можно разделить на две фазы: фаза опоры и фаза переноса. На фазе опоры, где БИНС считается неподвижной, можно уточнить координаты и ориентацию, используя технологию коррекции по нулевой скорости ( zero velocity update ) [6].
Введем две системы координат: Cx – неподвижная относительно Земли и Mz – жестко связанная с чувствительным элементом БИНС, установленной на стопе. Ось x вертикальна; оси x 1 , x привязаны к ориентирам на местности (рис. 1).
Относительную ориентацию Cx , Mz определим углами Эйлера–Крылова:
Cx ——> ——■ — —^ Mz . (1)
Пусть ω – угловая скорость БИНС; f – кажущееся ускорение чувствительной массы M БИНС. Под кажущимся ускорением здесь и ниже понимается удельная сила, создаваемая акселерометром и действующая со стороны корпуса БИНС на чувствительную массу. Обозначим toz , f проекции to , f на оси системы Mz ; tox , f - проекции to , f на оси системы Cx .
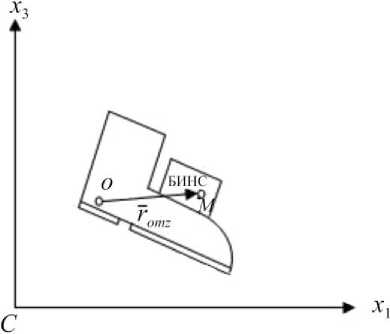
Рис. 1. Примерное положение систем координат и блока БИНС. Чувствительная масса БИНС смещена относительно каблука ботинка
Введем модель погрешности датчиков угловой скорости и акселерометров в виде toZ =ю z +v z + 5to z, f' = fZ +5f,. (2)
Здесь го ' - измеренная угловая скорость; f 'z - измеренное кажущееся ускорение; vz - дрейф датчиков угловой скорости; 5toz - шум датчиков угловой скорости; 5 fz - шум акселерометров.
Требуется определить координаты x чувствительной массы навигационной системы в системе координат Cx на некотором отрезке ходьбы [ t0 , tm rf], используя измерения to '( t ), f z( t ) и начальные условия. Длина отрезка - от долей минут до нескольких минут.
Алгоритм навигации
При решении поставленной задачи примем следующие упрощающие предположения, допустимые при использовании низкоточной инерциальной навигационной системы: угловой скоростью вращения Земли можно пренебречь; вектор силы тяжести постоянен в пространстве.
Алгоритм состоит из следующих блоков: решение модельных уравнений, выставка, определение фазы опоры, коррекция.
Модельное уравнение. Модельное уравнение описывает движение модельной точки и модельную ориентацию приборного трехгранника. Запишем модельные уравнения в виде [2, 3]:
q = - q О\, x = v x , v = B lI f Z + g , , B l, = B ( q ) . (3)
Здесь q e R4 - кватернион поворота от Cx к модельному трехграннику Mz '; vx - модельная линейная скорость чувствительной массы относительно Земли; B'zx -матрица преобразования от системы Cx к Mz' ; О обозначает умножение кватернионов [4];

0 Л to Z у
e R4 .
В дискретном времени tm = m A t , m = 0, 1, 2,-•• уравнение Пуассона записывается в виде q(tm + 1) = A q(tm ) О q(tm ) , где введены обозначения
A q = [ a p о, a p Г ,
A p 0 = cos
k
2 ,
A p = sin
k
k
k = to 'z A t .
С использованием известных измерений to z( t ), f z'( t ); [ t 0< t < ten rf] и известных начальных условий x '( t 0), v '( t 0), 6'( t 0), Y'( t 0), ^\t0 ) можно решить модельное уравнение и получить модельные координаты, скорости и углы x '( t ), v '( t ), 0'( t ), Y'( t ), Y'( t ) относительно системы координат Cx как функции времени.
Алгоритм выставки. Рассмотрим задачу определения начальных условий x '(t0), v '(t0), 0'(t0), Y'(t0), V'(t0) для модельных уравнений, называемую задачей начальной выставки. Во время начальной выставки инерциальная система предполагается неподвижной. Без ограничения общности предполагаем, что во время выставки истинные значения координат x(t0) и скоростей v(t0) равны нулю, и, так как начальное положение системы считается известным, можно утверждать, что x'(t0) = 0, v'(t0) = 0. Поскольку для грубых датчиков угловой скорости, не чувствующих угловую скорость Земли, угол курса у не определяется, считаем у'(to) = 0. Ищем начальные значения углов крена и тангажа 0'(t0), у'(t0), используя соотношения
Разрешая последние уравнения относительно 0 '( t 0), у '( t 0), получим
0 '( t 0) = arc sin
g 0 ,
Y '( t 0) = arc sin
f ' z
V g 0 cos 0 ' ( t 0 ) J
Нахождение фазы опоры. Предположим, что определен момент t начала ( k - 1 )-й опорной фазы и найдены модельные переменные x '( t k - 1 ), v '( t k - 1 ), 0 '( t k - 1 ),
Y'(tkч), V'(tk-1) в этот момент. Рассмотрим алгоритм поиска следующего момента начала опоры tk. Решая модельное уравнение на отрезке [tk_,< t < t. ], где t, взято заведомо больше, чем tk, найдем матрицу B^(t) = B^T (t) преобразования от трехгранника Mz' к Cx и проекции кажущегося ускорения на оси Cx:
f x ' ( t ) = ^ xz ( t ) • f z ' ( t ), [ t k - 1 < t < t * ]
Введем некоторые пороговые значения to mx и A f max . Определим фазу опоры как интервал [ tk , t ®], на котором выполнены неравенства
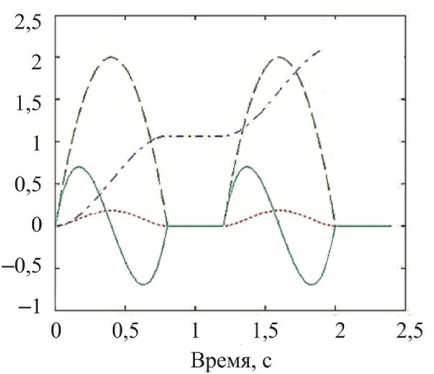
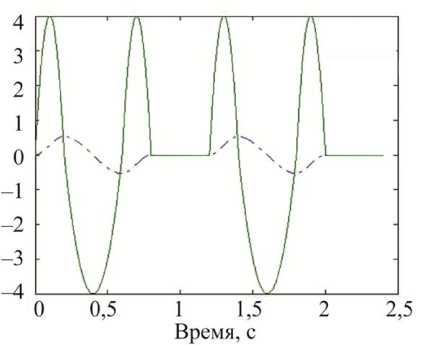
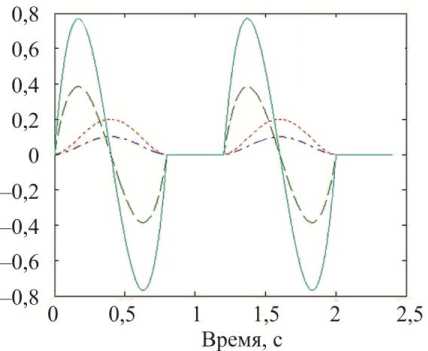
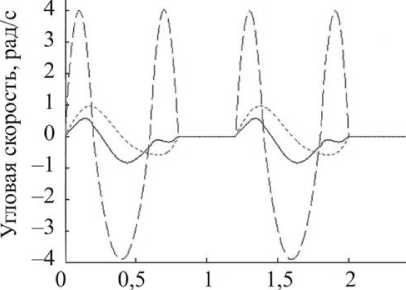
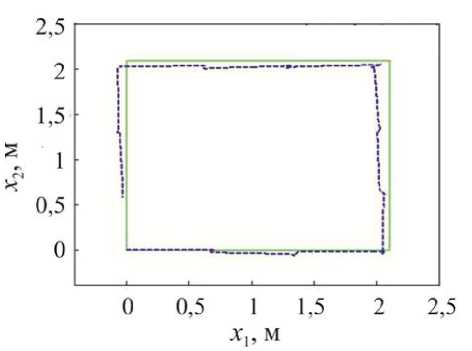
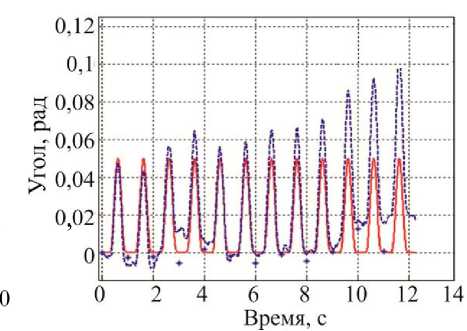
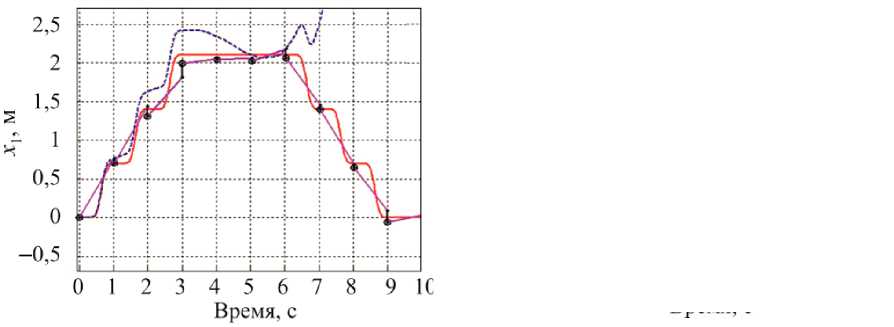
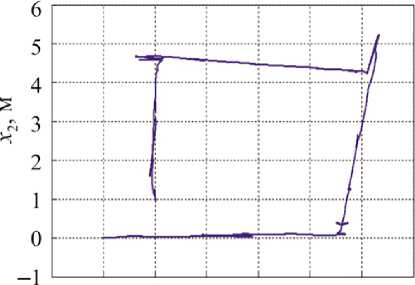
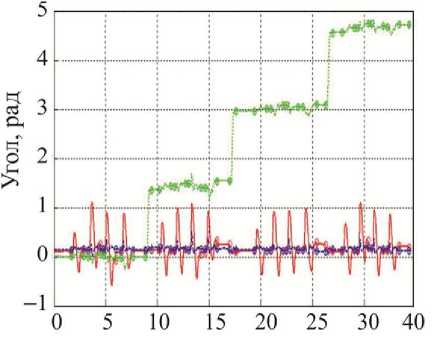
„ ' кА mm max f'(t)-gx toz(t) < to , Алгоритм коррекции в форме UKF. Сигма-точечная форма фильтра Калмана – «Unscented Kalman Filter» (UKF) – является распространением линейной фильтрации Калмана на случай, когда уравнения динамики и наблюдения системы нелинейны и не могут быть адекватно линеаризованы. Этот алгоритм использует подход «сигматочечного преобразования» – «unscented transform» (UT), который подразумевает выбор некоего минимального набора точек (сигма-точек) для задания математического ожидания и ковариации искомого вектора с наложенными на него случайными помехами. По сигма-точкам строятся нелинейные функции прогноза, которые затем используются для вычисления матрицы ковариации. Основная идея UT в предположении, что легче аппроксимировать функцию распределения вероятности случайной величины с ненулевым математическим ожиданием, чем аппроксимировать произвольную нелинейную функцию преобразования. Данная методика подразумевает выбор специальным методом набора точек (сигма-точек) в пространстве параметров, который с достаточной точностью описывает статистические характеристики (математическое ожидание, дисперсию и отчасти моменты более высоких порядков) искомого случайного вектора [7]. Перейдем к описанию алгоритма Unscented Kalman Filter. Рассматривается следующая нелинейная система: Ук+1 = f(Ук)+wk. zk = h(Ук) + 5zk. Здесь f – закон движения; yk – вектор состояния; wk – шум в динамике; zk - измерение; h - функция измерений; 5zk - шум в измерениях; к - номер фазы опоры. Пусть у - оценка y; P - ковариационная матрица ошибок оценки; % - сигма-точки вокруг y ; L – размерность вектора состояния y ; λ – масштабный коэффициент; W - вес; у - - априорная оценка состояния; K - коэффициент обратной связи; ук -апостериорная оценка состояния. Инициализация фильтра имеет вид у0 = ПУо ]. Р0 = Д(Уо - у0 )(Уо - y0)T ]. Сигма-точки в некоторый момент к — 1 определены формулами хк—1 = [ Ук—1. Ук—1 + V (L+X) Pk—1 . Ук—1—4 (L+X) Р—1 ], к €{1 • • •.^. Априорные оценки в следующий момент k определены формулами прогноза 2 L 2 L х,.- = f(хкл. .у Wi'-1 хм,—,. рг=^wu,,—, —y- ] [Xi,„—,—у-]т. i=0 i=0 Здесь веса задаются формулами W(m) = W(c) = 0x+x, 0 X X + L + (1 — a2). W(c) = W(m) =----1----. i i 2(X + L) где a ~ 10-3. X = a2L—L - настроечные параметры [7]. Априорные оценки измерения и ковариации их ошибок определены формулами 2 L 2 L2 Pzkzk = ^ Wi( )[Zi.к—-1 — zk ] [Zi.к—-1 — zk ] , РУ^к = ^ Wi [Xi.к——1 — Ук ] [Zi.к-—1 — zk ] i=0 Апостериорные оценки в момент k вычисляются по формулам коррекции: K = PzP—1. Ук = Ук-+ K (zk — zk—). P = P-— KPZZKT. ykzk zkzk k k k k k k zkzk Применительно к рассматриваемой задаче навигации f – результат интегрирования уравнений (3) на интервале переноса [tГ.tk+1] или опоры [tk,t^1)]; размерность вектора состояния L = 9; у = [x. v. 6. у. y]T; h = [x3. v1. v2. v3]T. что соответствует предположению о движении по ровной местности. В качестве моментов коррекции рассматриваются как моменты tk начала опорной фазы, так и моменты t(1) конца опорной фазы. Имитационное моделирование Целью имитационного моделирования является проверка потенциальной точности метода. Для изучения особенностей показаний БИНС, укрепленной на стопе в процессе ходьбы, необходимо сымитировать движения стопы. Здесь строится весьма упрощенная имитационная модель, не претендующая на биомеханическую достоверность. Рассмотрим один шаг пешехода, предполагая все шаги правой и левой ноги одинаковыми и рассматривая для определенности движение правой стопы. Шаг состоит из четырех участков: Γ – состояние статической опоры. В этом положении скорость и угловая скорость стопы равны нулю. Γ – процесс отрыва стопы: пятка отрывается от поверхности земли, а носок продолжает касаться земной поверхности. Γ – процесс переноса: стопа полностью оторвана от земли. Γ – процесс прислоения стопы: пятка касается земной поверхности, и носок постепенно опускается. Обозначим T , T , T , T длительности участков Γ , Γ , Γ , Γ . Моменты начала соответствующих участков обозначим tk, t®, tР, t(^ (рис. 2). В данной модели предполагается, что, когда правая нога находится в состоянии Γ , левая нога находится в состоянии Γ . Таким образом, длительности Γ и Γ равны. Отсюда следует, что, когда левая нога находится в состоянии Γ , правая нога находится в состоянии Γ и T и T равны. Описанные основные участки движения стопы циклично повторяются при ходьбе. В имитационной модели задаются значения x, v, 0, у, V в точках опоры tk и точках максимальной высоты подъема стопы (t(2)+1^3)) / 2, данные точки соединяются сплайном третьего порядка, с помощью которого вычисляются значения координат, углов, скорости и ускорения в промежуточных точках (рис. 3–5). Примерное положение блока БИНС на стопе показано на рис. 1, где O – пятка. Координаты чувствительного элемента M БИНС в системе координат Oz предполагаются постоянными. Пусть romz - радиус-вектор OM в системе отсчета Oz; x, vx, ax - координаты, абсолютная скорость и абсолютное ускорение точки M относительно системы координат Cx; r – радиус-вектор CO в системе отсчета Cx; Oz – система координат жестко связана со стопой. Рис. 2. Участки и длительность участков одного шага Рис. 3. Графики координат и скоростей точки O при имитации: Рис. 4. Графики зависимости угла и угловой скорости тангажа от времени: x ; dx / dt ; x ; dx / dt О; d О / dt Рис. 5. Графики зависимости углов крена и тангажа (пунктир) и соответствующих угловых скоростей (сплошная линия) от времени Время, c Рис. 6. Графики зависимости показаний датчиков угловой скорости от времени: ю — zx; — to — z2; to - z3 при имитации: у ; — d у / dt; v ; — d V / dt Bx = B (Y) B (О) B (v), юz = B(у) B(О) V(t) 0 + B (Y) 0( t) 1 + у (t) 0 Введем матрицы элементарных поворотов (1) "1 0 0 " cos 0 0 —sin 0 cos v sin v 0 " B (Y) = 0 cos y sin у , B(0) = 0 1 0 , B(V) = — sin v cos V 0 _0 — sin у cos у sin 0 0 cos 0 _ 0 0 1 _ Тогда имеют место формулы 0 0 Координаты, скорость и ускорение точки M в системе отсчета Cx определены формулами x = Bzx Гтz + Гоx , Vx = Bz1 (®z XГтz) + Гоx , ^ = B- (ч X^-XГотz + Ч X Гmz^ + Гоx . zx omz cox x zx z omz cox x zx z z omz z omz cox Ускорение точки M в проекции на оси Oz определено формулами a = B a ; gz = Bzxgx • Кажущееся ускорение fz от удельной силы, действующей на чувствительную массу БИНС, определяется формулой f =a-g. При вычислении показаний датчиков (2) δf , δω моделируются как белые шумы со средними квадратами (СКО) d[8f. ], o[dw ], а vz - как случайные величины, постоянные в течение шага, со средними квадратами c[5v. ]. Модельная траектория стопы представляет собой квадрат. Приняты следующие значения параметров: At = 0,01 с, а[5®z] = 0,05рад, a[5vz] = 0,02рад, q[5fz] = 0,1 -м. с с с В табл. 1 приведена зависимость среднеквадратического отклонения ошибок навигации от длины шага. При ходьбе короткими шагами погрешность навигации уменьшается, что может объясняться большим числом точек коррекции. В табл. 2 показана зависимость ошибок навигации от параметров погрешностей акселерометров (м/с2). При увеличении погрешностей датчиков, как и следовало ожидать, точность уменьшается. На рис. 7 представлены графики истинной траектории и ее оценки. Таблица 1 Зависимость СКО погрешностей определения координат и углов тангажа, крена и курса стопы от длины шага Параметр Длина шага 0,5 м 1 м a[dx ] 0,064 0,071 о[5в] 0,047 0,051 o[5y] 0,048 0,052 o[5v] 0,011 0,012 Таблица 2 Зависимость СКО погрешностей определения координат и углов тангажа, крена и курса стопы от величины СКО шума акселерометров a[f ] Параметр Величина СКО шума акселерометров а[5f ] = 0,1 м/с2 о[5f ] = 0,2 м/с2 g[5fz ] = 1,0 м/с2 о[5x ] 0,071 0,075 0,240 а[50] 0,051 0,053 0,056 o[5y ] 0,052 0,054 0,061 45^] 0,012 0,013 0,031 Навигация при реальных данных В этом эксперименте используется блок инерциальных датчиков с микроэлектронными механическими сенсорами ADIS16405 производства компании Analog Devices. Прибор включает три магнетометра, три акселерометра и три гироскопа. Частота съема переменная, порядка 270 Гц. Данные записываются в компьютер через USB-кабель. Прибор был закреплен на деревянной дощечке, примотанной скотчем к стопе испытуемого. В эксперименте испытуемый прошел по квадрату размером 4,7×4,7 м и вернулся в исходную точку. Угол курса, координаты и скорости в начальный момент t примем, как указывалось выше, равными нулю, а углы крена и тангажа определяются начальной выставкой. x'(10) = 0, v'(10) = 0, 9'(10) = 0,10, Y'(10) = 0,13, V'(tо) = 0. Для того чтобы найти фазы опоры [ 1к, 1^ ], примем следующие пороговые значения параметров на интервале [ 1к, 1* ]: wmx < 0,039 рад, f max < 0,15 м. с с2 Рис. 7. График траектории движения стопы при имитации: истинная; модельная Рис. 9. Зависимость угла тангажа стопы от времени: истинная; модельная; скорректированная Рис. 8. Зависимость продольной координаты стопы от времени: истинная; модельная; скорректированная Используем корректирующие измерения в начале и в конце фазы опоры: x3( tk ) = 0 • v1( tk ) = 0 • v2( tk ) = 0 • v3( tk ) = 0, x,( tk") = 0 • v,(tf) = 0 • v2( tk") = 0 • Уз( О = 0. Для навигации необходима предварительная калибровка БИНС, т.е. определение масштабов, перекосов и смещений показаний датчиков. С учетом ошибок масштабов и перекосов уравнения измерений имеют вид f" = KJ'+ bf • юz = кm«'+ bm. Определение матриц K , K можно проводить один раз за время жизни БИНС. Для определения K , K применен метод [1] с использованием грубого поворотного стенда (калибровка проведена А.В. Козловым). После введения масштабных матриц Kj, K уравнения измерений можно переписать в виде fZ = f ”+ bf • ® Z = ®”+ ь • где f", ю" - масштабированные показания датчиков; bf , bm - постоянные векторы. Калибровка смещений нулей ввиду их нестабильности необходима перед каждым экспериментом. Калибровка смещений нулей b акселерометров проведена следующим образом: блок инерциальных датчиков разворачивается в разные положения и фиксируется в течение некоторого времени At (несколько секунд). Далее вычисляется < f" >;- средние показания акселерометров f" в течение времени At.. Для определения b решается нелинейная задача минимизации: X .,2 J(bf)=£[1 d —l< f" >i+ bfll] ^ minbf • i =1 После минимизации значение J уменьшилось в тринадцать раз, т.е. смещения уточнены по крайней мере в три раза. Значения дрейфов датчиков угловой скорости b вычисляются как среднее < ю" > перед началом движения. На рис. 10 приведена траектория чувствительной массы на плоскости. Уход координат за 30 с составил порядка метра. На рис. 11 показана зависимость углов от времени. Углы крена и тангажа имеют практически нулевой дрейф. Дрейф угла курса значительно меньше, чем дрейф соответствующего датчика угловой скорости. Следует отметить, что динамический диапазон используемых датчиков угловой скорости был 6 рад/с, в то время как угловая скорость по тангажу достигала 10 рад/с. Чтобы исправить ситуацию, показания датчиков угловой скорости на участках насыщения экстраполировались посредством полинома пятого порядка, со вторым порядком гладкости в точках склейки. Это позволило значительно улучшить точность навигации, хотя неучтенные угловые скорости, без сомнения, остались. Проблема насыщения, в совокупности с низкой точностью датчиков, привела к ошибке навигации порядка 1 м. Отметим при этом, что без коррекции модельные уравнения «разваливались» в течение двух шагов. Ожидается, что переход к новым датчикам позволит качественно улучшить ситуацию. 1 0 1 2 3 4 5 6 х,, м Рис. 10. Траектория стопы на плоскости в эксперименте Рис. 11. Зависимость углов курса, крена и тангажа стопы от времени в эксперименте: θ; γ; ψ Выводы Разработана методика навигации пешехода с использованием установленной на стопе беcплатформенной инерциальной навигационной системы. Для коррекции по нулевой скорости применен алгоритм Unscented Kalman Filter. Методика проверена на модельных данных, проведены эксперименты с БИНС «ADIS16405». Алгоритмы дали ошибку порядка 1 м при движении в течение 30 с. Результаты показали, что угловая скорость стопы по тангажу даже при медленной ходьбе достигает 8 рад/с, что приводило к насыщению показаний датчиков угловой скорости. Поэтому, чтобы добиться хороших результатов, следует использовать датчики угловой скорости с динамическим диапазоном не менее 10 рад/с. По-видимому, для повышения точности навигации в течение длительного времени требуется дополнительная коррекция с использованием, например, информации о прямолинейности движения на каких-то участках. Заметим в заключение, что достоинством инерциальных датчиков в сравнении с системой видеоанализа является высокая точность при измерениях в течение коротких промежутков времени, однако при изменениях в течение длительного времени наблюдаются значительные «уходы» координат. Возможно, использование описанной технологии позволит строить кинограммы движения стопы и других звеньев человека без использования системы видеоанализа. Благодарности Работа выполнена при поддержке РФФИ (грант 13-01-00604A). При экспериментах использовалось оборудование системы панорамной виртуальной реальности лаборатории математического обеспечения имитационных динамических систем (МОИДС).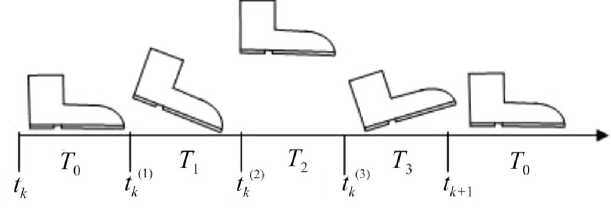
Список литературы Навигация пешехода с использованием бесплатформенной инерциальной навигационной системы (БИНС), установленной на стопе
- Вавилова Н.Б., Парусников Н.А., Сазонов И.Ю. Калибровка бескарданных навигационных систем при помощи грубых одностепенных стендов//Современные проблемы математики и механики. -2009. -Т. 1. -С. 212-223.
- Голован А.А., Парусников Н.А. Математические основы навигационных систем. Ч. I. -М.: Изд-во МГУ им. М.В. Ломоносова, 2010. -132 с.
- Голован А.А., Парусников Н.А. Математические основы навигационных систем. Ч. II. -М.: Изд-во МГУ им. М.В. Ломоносова, 2011. -170 с.
- Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. -М.: Наука, 1976. -672 с.
- Bebek O., Suster M., Rajgopal S., Fu M. Personal navigation via shoe mounted inertial measurement units//IEEE/RAS-EMBS International Conference on Intelligent, Robots and Systems. -Taipei, 2010. -P. 1052-1058.
- Feliz R., Zalama E. Pedestrian tracking using inertial sensors//Journal of Physical Agents. -2009. -Vol. 3, № 1. -P. 35-42.
- Wan E., Merwe R. The unscented kalman filter for nonlinear estimation//IEEE/AS-SPCC Adaptive Systems for Signal Processing, Communications, and Control Symposium. -Alta, 2000. -P. 153-158.
