Нечеткий регулятор со скользящим режимом на основе мягких вычислений: сравнение с инструментарием FIS и ANFIS

Автор: Нефдов Никита Юрьевич, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 1, 2013 года.
Бесплатный доступ
В статье проводится исследование управления со скользящим режимом для неустойчивой динамической системы каретка-маятник с использованием инструментария оптимизатора баз знаний на основе мягких вычислениях. Рассматривается сравнение качества баз знаний, созданных с помощью эксперта и интеллектуальных систем управления: оптимизатора баз знаний и инструментария МАТЛАБ FIS и ANFIS на основе моделирования управления неустойчивого динамического объекта.
Интеллектуальные системы управления, робастность, мягкие вычисления, база знаний, скользящий режим управления, нечеткая логика
Короткий адрес: https://sciup.org/14123224
IDR: 14123224
Fuzzy sliding mode control system of unstable dynamic system cart-pole based on soft computing: comparison with FIS and ANFIS toolkits
In this paper we study sliding mode control for unstable dynamic system cart-pole using soft computing optimizer. Comparison of knowledge bases quality by intelligent control systems designed by expert FIS, soft computing optimizer and ANFIS toolkits are considered.
Текст научной статьи Нечеткий регулятор со скользящим режимом на основе мягких вычислений: сравнение с инструментарием FIS и ANFIS
Метод управления со скользящим режимом (СР) был разработан в конце 1950-х годов [1], а к концу 1970-х годов, был признан одним из наиболее перспективных надежных методов управления [2]. Тем не менее, первые реализации управления на основе СР показали, что реальный СР порождает колебания, устранение которых является наиболее проблемным вопросом в приложениях, использующих данную технику управления [3].
Следующие три основных подхода по устранению колебаний в системе СР были предложены в середине 1980-х годов:
-
- Использование насыщенности управления вместо разрывного управления [4]. Такой подход позволяет управлять непрерывно, но не может удерживать динамику системы в пределах на поверхности переключения. Этот подход обеспечивает только сходимость к пограничному слою скользящего многообразия, размер которых определяется по наклону характеристики насыщения.
-
- Наблюдательный подход [5]. Такой подход сводит проблему робастного управления к проблеме точной робастной оценке и, следовательно, может привести к ухудшению робастности по отношению к объекту управления, в связи с несоответствием наблюдателя и динамики объекта [3].
-
- Скользящий режим высокого порядка [6]. Позволяет за конечное время обеспечить сходимость к нулю не только по скользящей переменной, но и по её производным. Теоретически, скользящие режимы n -го порядка могут полностью подавлять колебания в модели системы; но не могут в реальной физической системе, когда в модели объекта присутствуют исполнительные устройства и датчики.
Следовательно, данным способом эффект колебаний не может быть предотвращен [7].
Отмеченная проблема может быть решена с помощью технологии интеллектуальных вычислений на основе технологии мягких вычислений с использованием ряда важных термодинамических, информационно-энтропийных и динамических критериев управления.
Целью данной работы является разработка нечеткого регулятора (НР) с помощью нового разработанного интеллектуального инструментария Оптимизатора баз знаний (Soft Computing Optimizer Toolkit of Knowledge Bases) [8], который позволит устранить возникающие при управлении СР колебания, используя технологию мягких вычислений.
Скользящий режим управления
Динамическое поведение НР характеризуется множеством лингвистических правил, составленных экспертом. Пользуясь этим множеством, механизм нечеткого вывода выдает соответствующее управляющие воздействие [9]. Для двухмерного случая нечеткое управление может использовать: ошибку (е) и скорость изменения ошибки (ё) как входные лингвистические переменные нечеткого правила. Таблица нечётких правил приведена ниже [10].
Таблица 1. Нечеткие правила
|
Δ u |
e |
||||||
|
NB |
NM |
NS |
Z |
PS |
PM |
PB |
|
|
e ̇ PB |
Z |
NZ |
NS |
NM |
NB |
NB |
NB |
|
PM |
PZ |
Z |
NZ |
NS |
NM |
NB |
NB |
|
PS |
PS |
PZ |
Z |
NZ |
NS |
NM |
NB |
|
Z |
PM |
PS |
PZ |
Z |
NZ |
NS |
NM |
|
NS |
PB |
PM |
PS |
PZ |
Z |
NZ |
NS |
|
NM |
PB |
PB |
PM |
PS |
PZ |
Z |
NZ |
|
NB |
PB |
PB |
PB |
PM |
PS |
PZ |
Z |
P – positive (положительный), N – negative (отрицательный), Z – zero (ноль), B – big (большой), S – small (малый), M – medium (среднее).
Другой способ рассмотрения правил таблицы – это фазовая траектория, показанная на рис. 1, стрелки показывают направление усиления.
На рис. 1 Z – поверхность переключения.
Из табл. 1 можно заключить, что если и близки к поверхности, то нечеткое управляющие воздействие усиленное, и чем дальше оно от поверхности, тем оно слабее. Поэтому, поверхность скольжения принимает вид: . (где – положительная переменная и определяет скорость схо димости для и ).
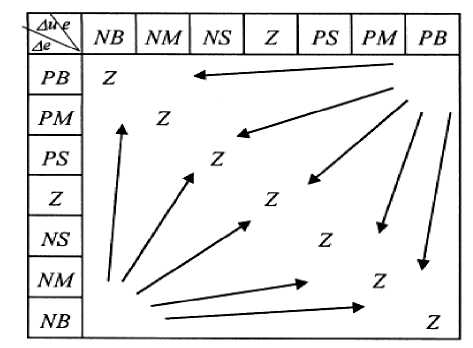
Рис. 1. Фазовая траектория НР
Структура ИСУ
На рис. 2 показана структура ИСУ для регулятора со СР.
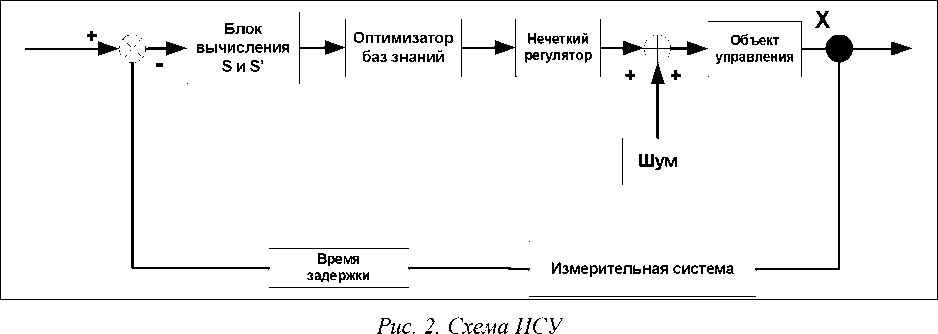
На вход блока вычислений зи s подается текущая ошибка управления (вычисляется как разность состояния ОУ и задающего сигнала) и скорость ошибки управления, после оптимизации параметров функций принадлежности в блоке Оптимизатора баз знаний, полученные значения поступают на вход НР, который выдает управляющее воздействие на ОУ.
Математическая модель системы
В качестве примера применения оптимизатора баз знаний (БЗ) рассмотрим задачу управления неустойчивой динамической системой «движущаяся каретка – перевернутый маятник» (рис. 3).
Динамическое поведение этой системы при воздействии силы управления u описывается системой дифференциальных уравнений второго порядка:
<
g sin 9 + cos 9
u + £ ( t ) + a 1 z + a 2 z — ml9 sin 9
— k9
••
9 =
к
mc + m
• • z =
l f4
—
2 л к m cos 9
к 3 mc+m j u + §(t) — a1 z — a2z + ml(92 sin 9 — 9 cos 9)
.
;
m c + m
В системе уравнений (1) z и θ – обобщенные координаты; g – ускорение свободного падения (9.8 m / sec2 ), mc – масса оси вращения (аналог массы подвижной каретки), m – масса перевернутого маятника (называемого «шест»), l – половина эффективной длины маятника, k и a 1 коэффициенты трения о поверхность горизонтального перемещения вдоль оси z и в оси вращения θ , соответственно, a 2 – сила упругости, препятствующая перемещению тележки, ξ ( t ) – внешний стохастический шум, а u – сила управления.
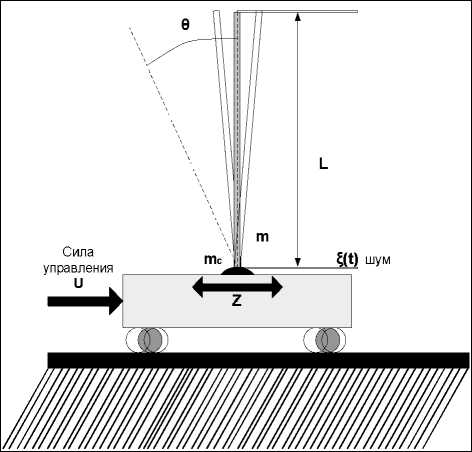
Рис. 3. Динамическая система «движущаяся каретка – перевернутый маятник»
Без управления маятник не может быть удержан в вертикальном положении.
Цель управления – сбалансировать положение маятника в условиях существенных ограничений на скорость и положение тележки, а также в условиях ограниченной силы управления. В этом случае для стабилизации необходимо выполнения условия θ = 0.
Рассмотрим модель динамической системы с параметрами:
Построим Matlab-модель для выбранных систем управления.
Проектирование регулятора со скользящим режимом в Fuzzy inference system (FIS)
В качестве данных (выбор количества и формы функций принадлежности) используем данные эксперта из [10] (см. табл. 2).
Таблица 2. Обучающая ситуация управления
|
Δ u |
s |
||||||
|
NB |
NM |
NS |
Z |
PS |
PM |
PB |
|
|
d s PB |
Z |
NZ |
NS |
NM |
NB |
NB |
NB |
|
PM |
PZ |
Z |
NZ |
NS |
NM |
NB |
NB |
|
PS |
PS |
PZ |
Z |
NZ |
NS |
NM |
NB |
|
Z |
PM |
PS |
PZ |
Z |
NZ |
NS |
NM |
|
NS |
PB |
PM |
PS |
PZ |
Z |
NZ |
NS |
|
NM |
PB |
PB |
PM |
PS |
PZ |
Z |
NZ |
|
NB |
PB |
PB |
PB |
PM |
PS |
PZ |
Z |
На рис. 4. показана Matlab-модель для нечеткого регулятора со скользящим режимом. Красной рамкой обозначен блок нечеткого вывода ( fuzzy inference system - FIS ), желтым – ОУ.
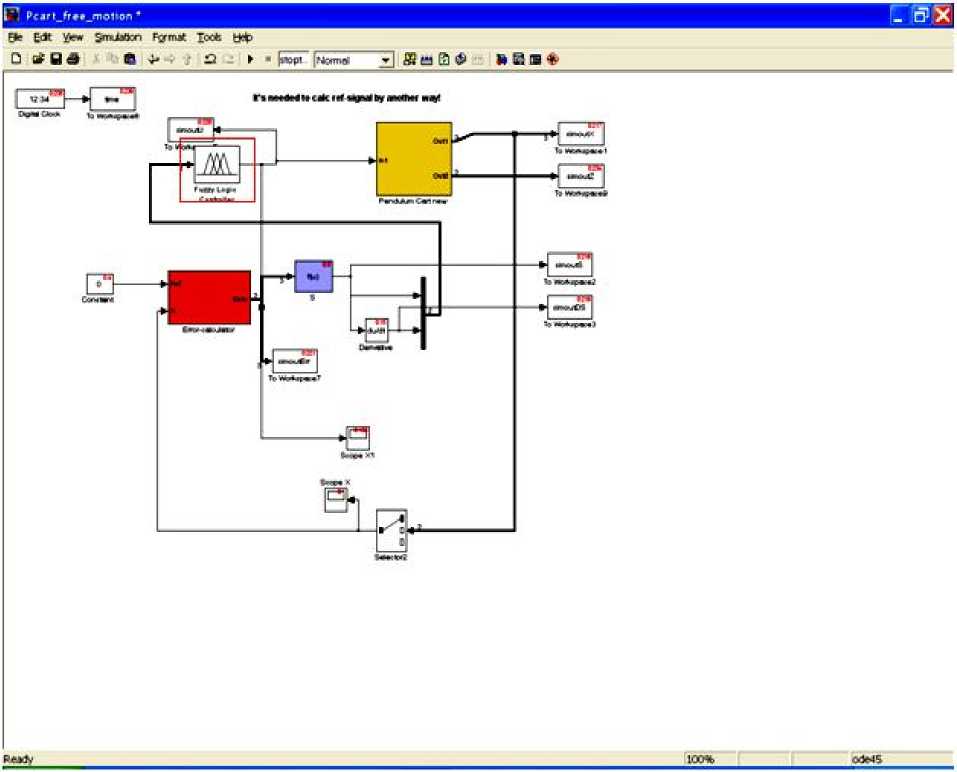
Рис. 4. Matlab-модель динамической системы
Создадим БЗ на основе экспертных данных из табл. 2, применив инструментарий Matlab – FIS editor [11].
На рис. 5-7 показаны результаты формирования функций принадлежности для функций поверхности переключения скользящего режима S , d S и управляющей силы U соответственно .
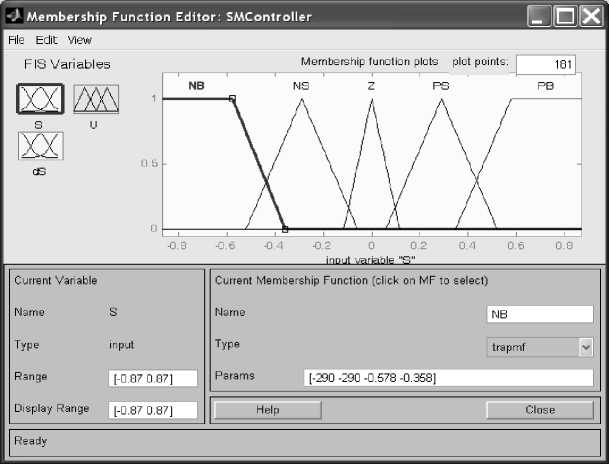
Рис. 5. Функции принадлежности для функции S
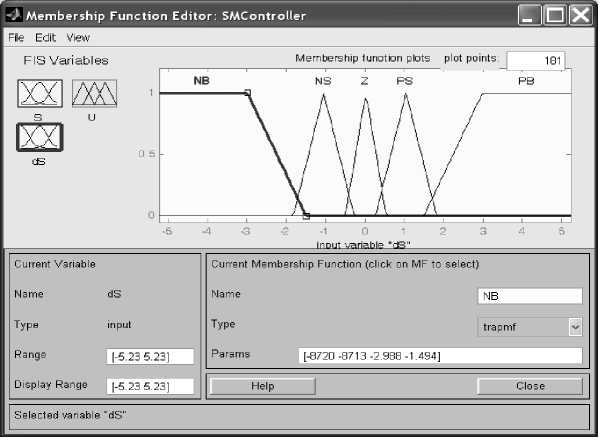
Рис. 6. Функции принадлежности для функции dS
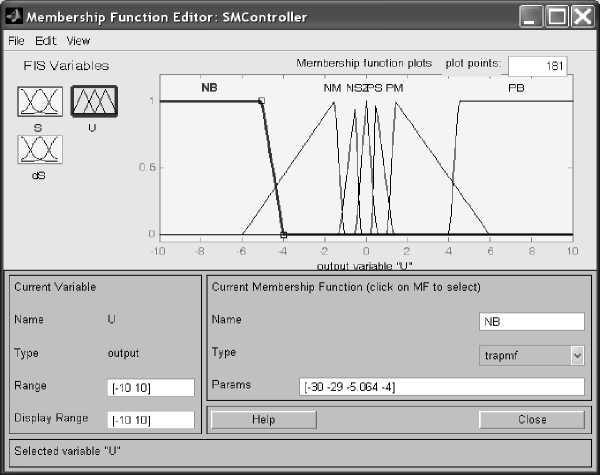
Рис. 7. Функции принадлежности для U
Создадим БЗ для системы в среде инструментария МАТЛАБ ANFIS [11, 12].
Проектирование регулятора со скользящим режимом в ANFIS
Для создания нечеткого регулятора в инструментарии ANFIS получен обучающий сигнал (ОС) на ситуации с внешними воздействиями (шум Гаусса).
Процесс проектирования нечеткого регулятора в ANFIS [11, 12] отражен на рис. 8.
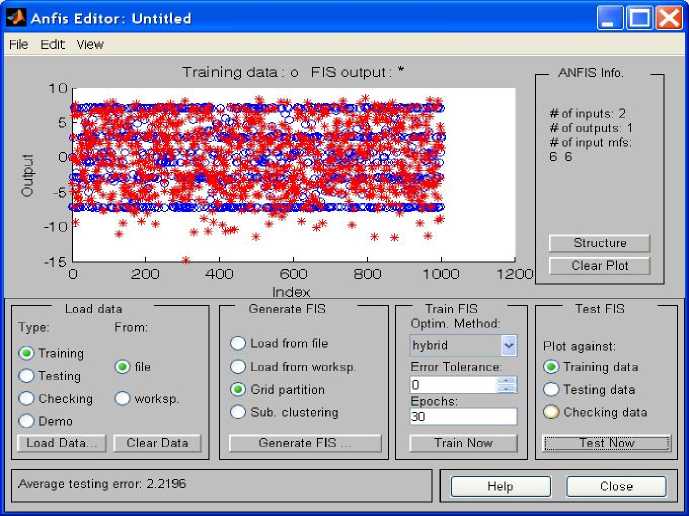
Рис. 8. Проектирование НР в ANFIS
Выбор количества и тип функций принадлежностей в ANFIS показан рис. 9.
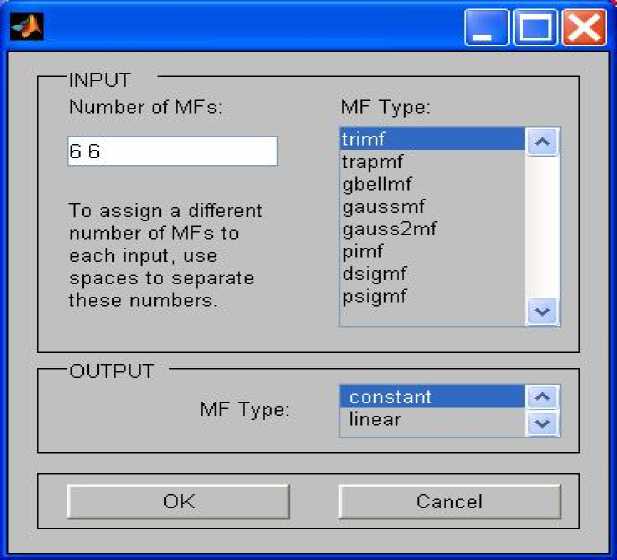
Рис. 9. Проектирование нечеткого регулятора в ANFIS
Структура нечеткой нейронной сети регулятора в ANFIS представлена рис. 10.
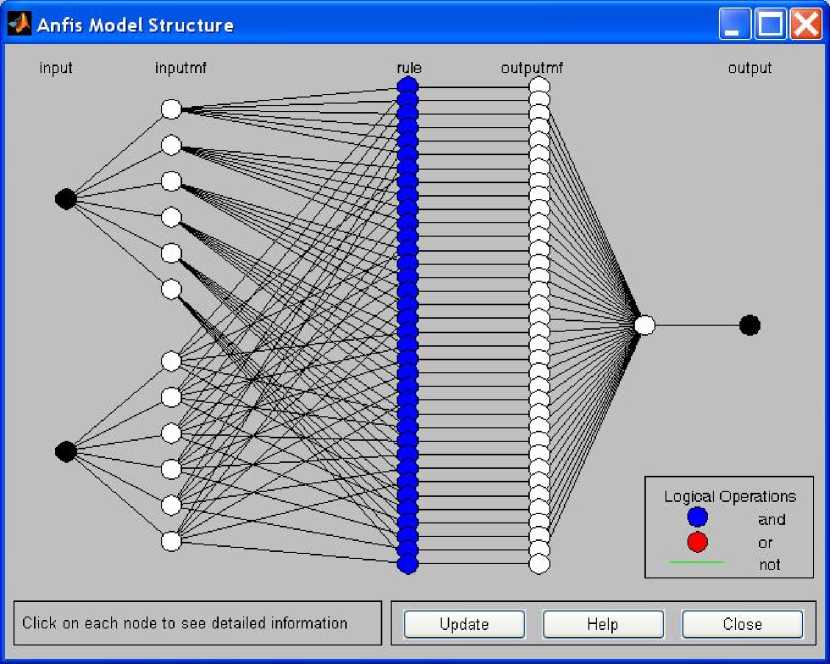
Рис. 10. Структура сети ANFIS
Построим БЗ в интеллектуальном инструментарии ОБЗ.
Проектирование регулятора со скользящим режимом в инструментарии Soft Computing Optimizer (ОБЗ)
Для создания НР в ОБЗ получен ОС на ситуации с внешними воздействиями (шум с распределением Гаусса).
На рис. 11-13 показаны спроектированные с помощью ОБЗ функции принадлежности.
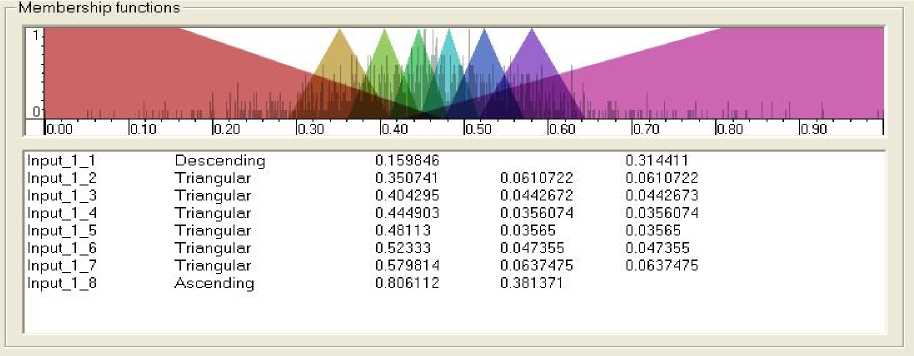
Рис. 11. Функции принадлежности для входной переменной S
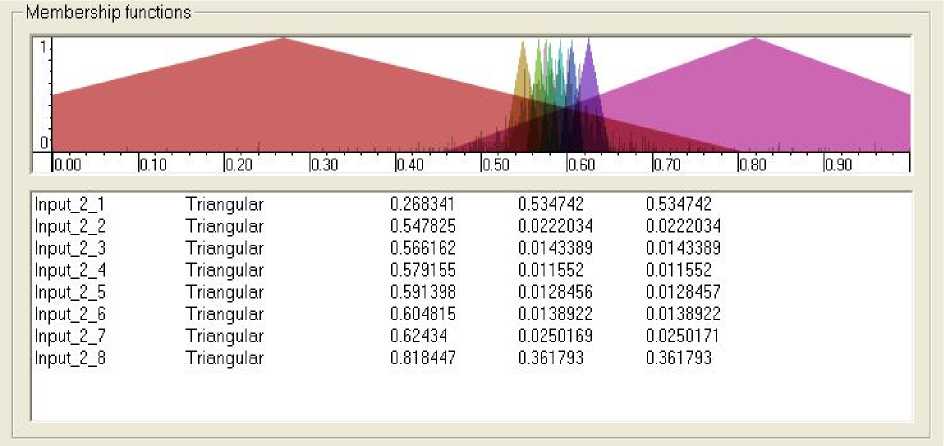
Рис. 12. Функции принадлежности для входной переменной dS
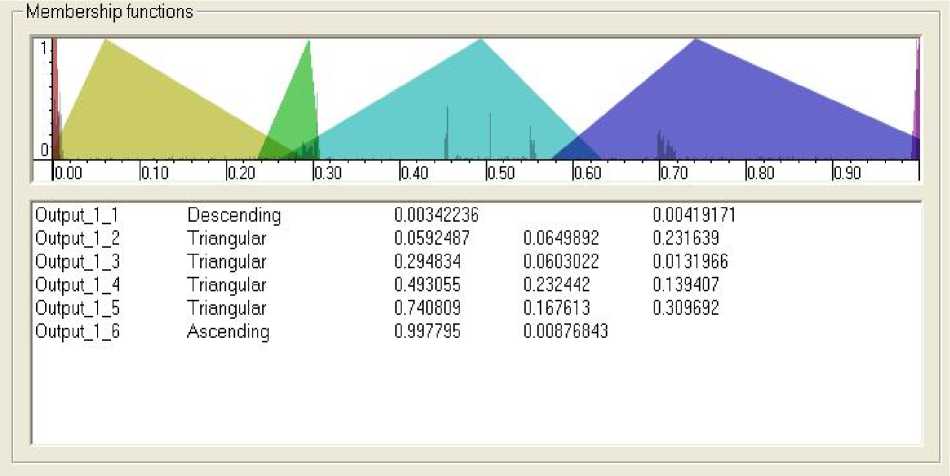
Рис. 13. Функции принадлежности для выходной переменной U
С помощью ОБЗ было спроектировано 6 баз знаний (все базы полные по 64 правила):
-
- Алгоритм Optimized;
-
- Алгоритм Optimized+алгоритм back propagation;
-
- Алгоритм Complete;
-
- Алгоритм Complete+алгоритм back propagation;
-
- Алгоритм Matlab;
-
- Алгоритм Matlab +алгоритм back propagation.
В результате моделирования на непредвиденных ситуациях (шум с распределением Гаусса) лучший результат показала база с алгоритмом Complete – номер 3.
Результат аппроксимации сигнала показан на рис. 14.

Maximal rule activation level
Average 0.52437 Dispersion 0.154669

O' ' ' ' |50 " ' |1OO" ' |15O" ' |200' ' ' |250 ' ' |300' ' ' |350' ' ' кбо' ' ' |45Ci' ' ' |500' ' ' |550' ' ' |б00' ' ' |б50' ' ' |700' ' ' |750 ' ' |S00' ' ' |S50' ' ' |900' ' ' |Э50' ' ' llOOO
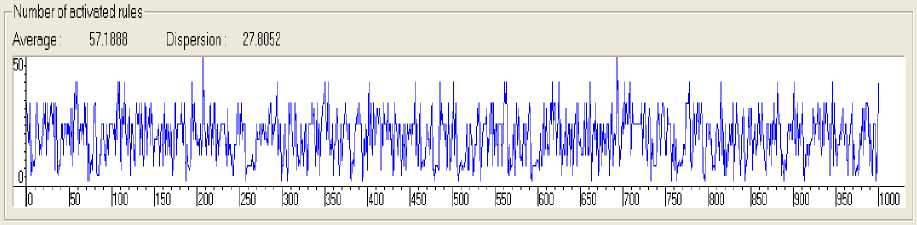
Рис. 14. Результат аппроксимации сигнала (сверху), активация правил (в середине), номера активированных правил (снизу)
Сравнение результатов моделирования
Будем рассматривать модель динамической системы с параметрами:
Обучающая ситуация
Шум Гаусса (максимальная амплитуда = 2); задающий сигнал = 0.
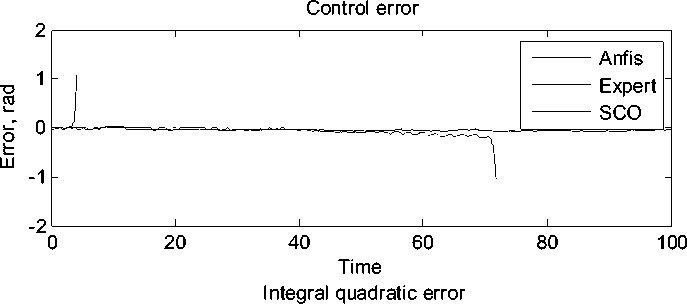
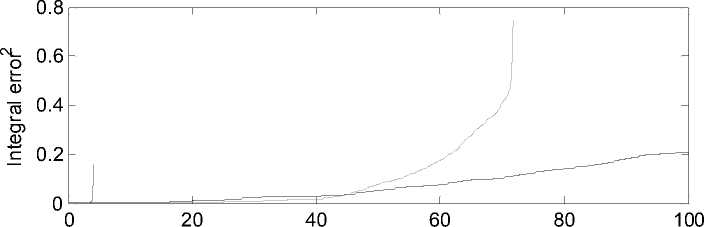
Сравнение работы ANFIS, Expert (FIS) и SCO (ОБЗ) в обучающей ситуации (рис. 15-17):
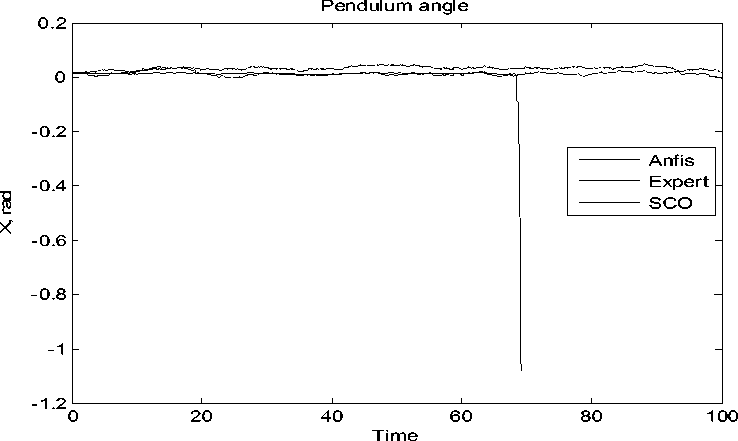
Рис. 15. Изменение угла маятника
z
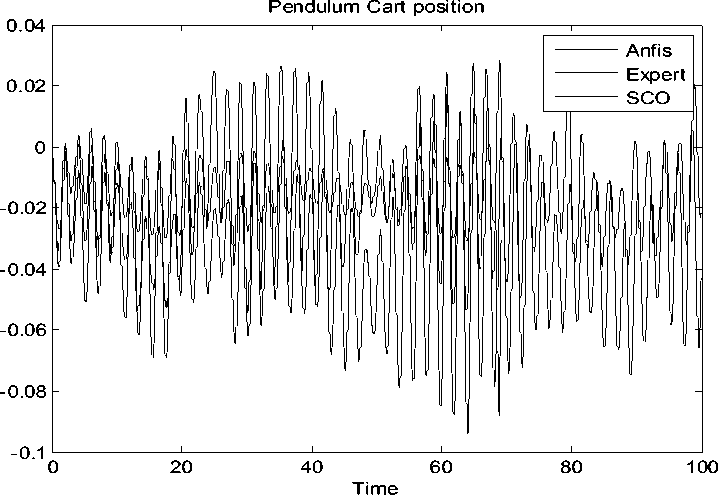
Рис. 16. Изменение положения каретки
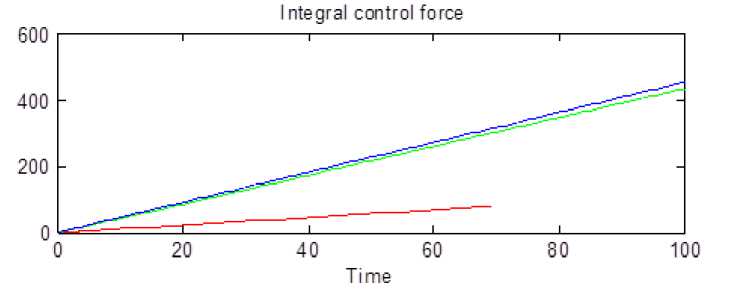
Рис. 17. Интегральная сила управления
Control error
1.5
CD

Ш
Anfis Expert SCO
-0.5
40 60 80 100
Time
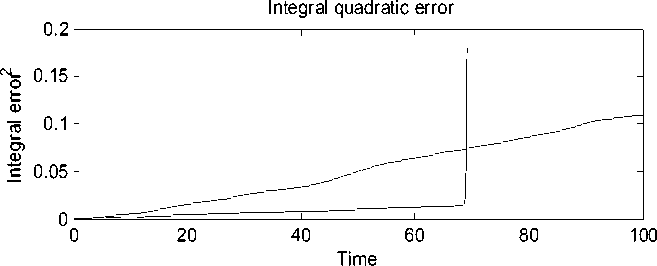
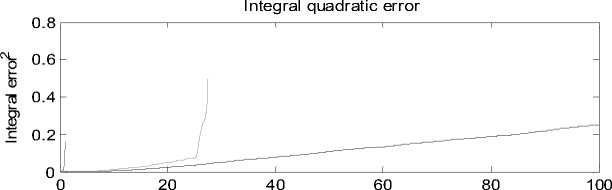
Рис. 18. Изменение ошибки и интегральной квадратичной ошибки управления
Исследуем на робастность спроектированные регуляторов, для этого рассмотрим работу регуляторов в непредвиденных ситуациях управления.
Непредвиденная ситуация 1
Шум Гаусса (максимальная амплитуда = 3,5); задающий сигнал = 0.
Сравнение работы ANFIS, Expert (FIS) и SCO (ОБЗ) в обучающей ситуации (рис. 19-22):
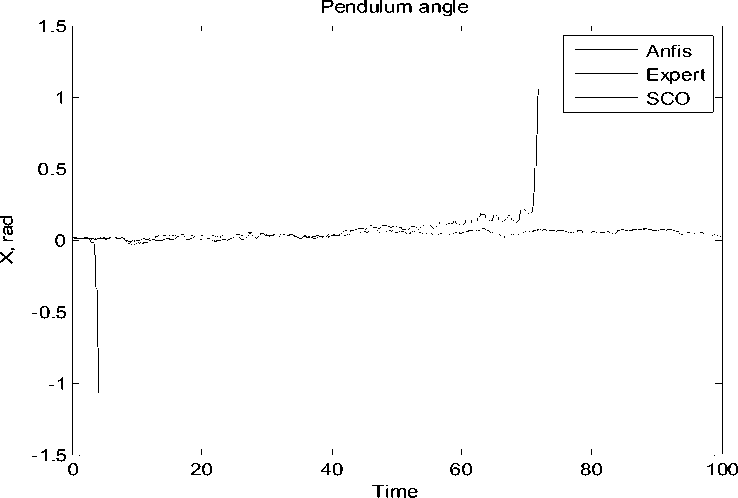
Рис. 19. Изменение угла маятника
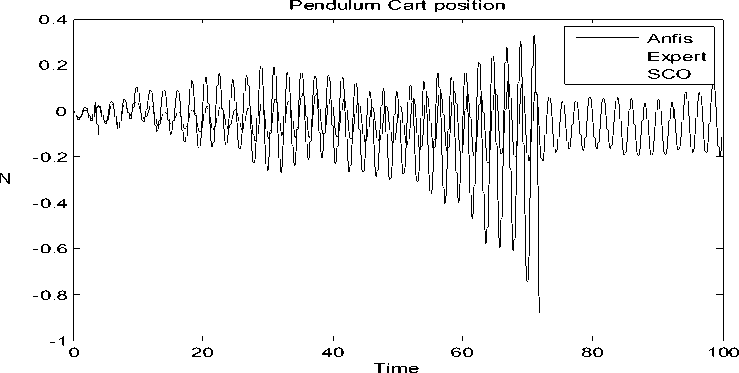
Рис. 20. Изменение положения каретки
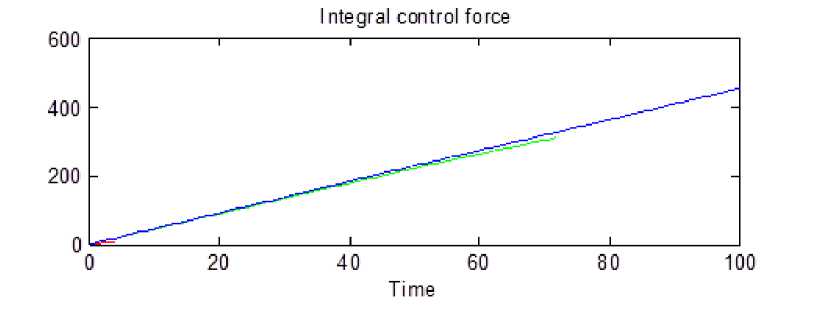
Рис. 21. Интегральная сила управления
Time
Рис. 22. Изменение ошибки управления и интегральной квадратичной ошибки управления
Непредвиденная ситуация 2
Шум Гаусса (максимальная амплитуда = 2,5); задержка в каналах измерения = 0.001; задающий сигнал = 0.
Сравнение работы ANFIS, Expert (FIS) и SCO (ОБЗ) в обучающей ситуации (рис. 23-26):
Pendulum angle
Anfis Expert SCO
-
1.4
-
1.2
0.8
0.6
0.4
0.2
0 20 40 60 80 100
Time
Рис. 23. Изменение угла маятника
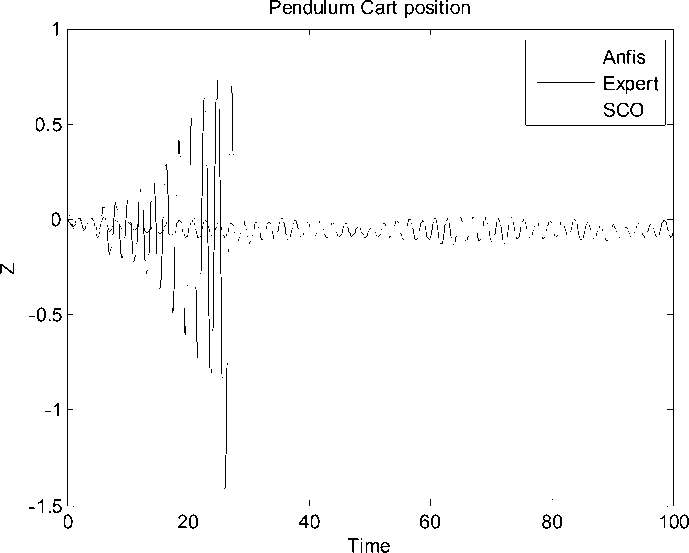
Рис. 24. Изменение положения каретки
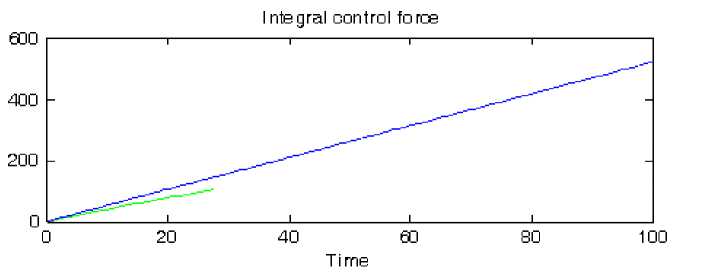
Рис. 25. Интегральная сила управления
Control error
-0.5

Anfis Expert SCO
-1 р
1.5II,---------------------------L
0 20 40 60 80
Time
Time
Рис. 26. Изменение ошибки управления и интегральной квадратичной ошибки управления
На рис. 27 показана диаграмма сравнения интегральной ошибки управления.
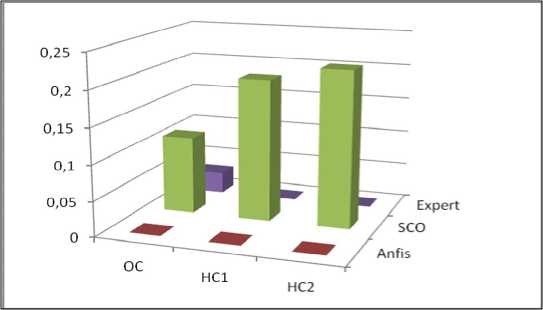
Рис. 27. Диаграмма сравнения интегральной ошибки управления
На рис. 28 показана диаграмма сравнения интегральной силы управления.
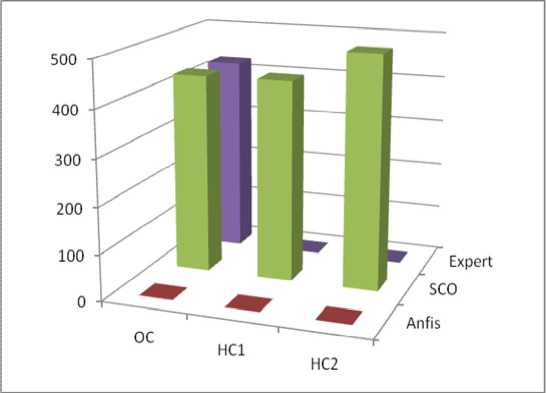
Рис. 28. Диаграмма сравнения интегральной силы управления
Из представленных на рис. 27 и 28 результатов видно, что БЗ построенная в ANFIS не способна достигать цели управления. Нечеткий регулятор, спроектированный с помощью эксперта, справляется с задачей управления только в обучающей ситуации. НР, спроектированный в ОБЗ, справляется во всех ситуациях управления с минимальным расходом полезного ресурса.
Заключение
Рассмотрен скользящий режим управления для неустойчивой динамической системы «каретка – перевернутый маятник» и представлена структура интеллектуальной системы управления со скользящим режимом. Проведено сравнение работы спроектированных регуляторов с помощью эксперта (FIS), системы нечеткого вывода ANFIS и интеллектуального инструментария ОБЗ для неустойчивой динамической системы.
Результаты моделирования динамического поведения рассматриваемого объекта управления «каретка – перевернутый маятник» показали эффективность и робастность спроектированного с помощью ОБЗ нечеткого регулятора даже в непредвиденных условиях управления.
Таким образом, новый разработанный инструментарий ОБЗ может строить робастные интеллектуальные системы управления, способные функционировать на множестве как обучающих (типовых), так и на классе новых (непредвиденных) ситуаций управления для систем, использующих скользящий режим управления.
Список литературы Нечеткий регулятор со скользящим режимом на основе мягких вычислений: сравнение с инструментарием FIS и ANFIS
- Utkin V. I. First Stage of VSS: people and events. Lecture Notes in Control and Information Science // X. Yu and J.-X. Xu, Eds. - London, U.K.: Springer-Verlag, 2002. - Vol. 274. - Pp. 1-33.
- Utkin V. I. Sliding Modes and Their Application in Variable Structure Systems. - Moscow, Russia: Mir Publishers, 1978.
- Young K. D., Utkin V. I., and Ozguner U. A control engineer's guide to sliding mode control // IEEE Trans. Control Syst. Technol. - 1999. - Vol. 7. - №3. - Pp. 328-342.
- EDN: YDHYWZ
- Slotine J. J. and Li W. Applied Nonlinear Control. Englewood Cliffs. - NJ: Prentice-Hall, 1991.
- Bondarev A. G., Bondarev S. A., Kostylyeva N. Y., and Utkin V. I. Sliding modes in systems with asymptotic state observers. // Autom. Remote Control. - 1985. - Vol. 46. - №5. - Pp. 679-684.
