Нейронечеткая сеть для проектирования ремонтно-обслуживающих баз

Автор: Побединский Владимир Викторович, Ляхов Сергей Владимирович, Салихова Марина Николаевна, Иовлев Григорий Александрович
Журнал: Resources and Technology @rt-petrsu
Рубрика: Полная статья
Статья в выпуске: 4 т.18, 2021 года.
Бесплатный доступ
Статья посвящена проблеме совершенствования технической эксплуатации автомобилей и транспортно-технологических машин (ТТМ), в частности проектированию ремонтно-обслуживающих баз (РОБ) автомобилей. Как известно, в технической эксплуатации машин важнейшей задачей была и остается задача правильной организации и проектирования РОБ. Для ее решения используется общепринятая методика, в которой завершающим результатом является расчет площади производственного корпуса, а также площади зоны постов и различных производственных подразделений. Но решение является достаточно сложной, что вызвано, главным образом, свойствами неопределенностей данных в задаче. Условия неопределенностей учитывается различными коэффициентами, делениями на категории, рекомендациями, что не добавляет точности решению задачи. По этой причине вновь созданные предприятия по ТО и Р автомобилей дорабатываются в процессе их эксплуатации. Для более обоснованного принятия проектных решений в задачах такого класса могут использоваться интеллектуальные системы и нейросети. Таким образом, была определена цель исследований, которая заключалась в создании нейронной сети для определения проектной площади в производственном корпусе зоны технологических постов для ТО и Р. Результатами работы являются разработанная нейронечеткая сеть для определения площади зоны технологических постов для ТО и Р. Для практического использования результаты рекомендуются для проектирования РОБ парка автомобилей.
Техническая эксплуатация автомобилей, проектирование ремонтно-обслуживающих баз, площадь зоны технологических постов, интеллектуальная система, нейро-нечеткая сеть
Короткий адрес: https://sciup.org/147236119
IDR: 147236119 | УДК: 004.891.3 | DOI: 10.15393/j2.art.2021.5883
Neuro-fuzzy network for the design of repair and maintenance bases
The article is dedicated to the problem of improving the technical operation of cars and transport and technological machines (TTM), in particular the design of repair and maintenance bases (RMB) of cars. As it is known, in the technical operation of machines, the most important task was and remains the task of the correct organization and design of RMB. To solve it, a generally accepted technique is used, in which the final result is the calculation of the area of the production building, as well as the area of the zone of posts and various production units. But the solution is quite complex, which is mainly caused by the data uncertainties in the problem. Uncertainty conditions are taken into account by various coefficients, division into categories, recommendations, which does not add accuracy to the solution of the problem. For this reason, the newly created enterprises for maintenance and repair of cars are being finalized during their operation. Intelligent systems and neural networks can be used to make more informed design decisions in problems of this class. Thus, the goal of the research was determined, which was to create a neural network to determine the design area in the production building of the zone of technological posts for repair and maintenance. The results of the work are a developed neural fuzzy network for determining the area of the zone of technological posts for maintenance and repair. For practical use, the results are recommended for the design of the RMB of the car park.
Текст научной статьи Нейронечеткая сеть для проектирования ремонтно-обслуживающих баз
В настоящее время парк автомобилей в мире составляет более 1,3 млрд единиц. И это без учёта технологических машин строительной техники. По некоторым прогнозам, до 2035 г. на планете будет около 2 млрд официально зарегистрированых автомобилей. Этот огромный парк требует на своё техническое обслуживание колоссальные финансовые затраты. Как известно, затраты на техническую эксплуатацию во много раз превосходят затраты на покупку техники, поэтому совершенствование процессов технической эксплуатации остаётся задачей актуальной и при этом её актуальность с увеличением парка техники всё возрастает. Большую часть эксплуатационных расходов составляют капитальные затраты на создание ремонтно-обслуживающей базы (РОБ), и в первую очередь на производственные здания для проведения ТО и Р. В этой части наибольшая ответственность возлагается на качественное выполнение проектной документации и обоснованность технических решений в проектах.
В настоящее время имеется много исследований, посвящённых изучению технической эксплуатации транспортных машин. Но вопросы проектирования РОБ, и в частности обоснования количества технологических постов и производственных площадей, рассмотрены более ограничено [1], [2], [3]. Между тем количество постов является основной характеристикой сервисных предприятий технического сервиса и от них зависят размеры площади здания, а следовательно, капитальные затраты. Уточнение таких данных позволит повысить эффективность технической эксплуатации за счёт правильно назначенных превентивных обслуживаний, а значит, сократить затраты на ремонт. Главной причиной тому будет большое количество неопределённых факторов и их взаимной связи с другими параметрами, а для такого класса задач предназначены методы интеллектуальных систем и нейросетей. Использование интеллектуальных систем для совершенствования технической эксплуатации машин в последнее время привлекает внимание многих исследователей, и уже предлагаются подобные решения [3], [4]. Но их особенность в том, что первоначально такие задачи решаются индивидуально для каждого конкретного случая. Такая же ситуация складывается и рассматриваемом случае для расчёта производственных площадей РОБ. При этом наиболее достоверным будет использовать подход на основе интеллектуальных экспертных систем или нейросетей.
Таким образом, на основе вышесказанного определилась цель настоящих исследований, которая заключается в создании нейронной сети для определения площади зоны технологических постов для ТО и Р.
В работе решались следующие задачи:
1) Изучение опыта использования интеллектуальных систем в технической эксплуатации автомобилей и в смежных областях знаний.
2) Постановка задачи определения площади зоны постов для ТО и Р с использованием нейросети.
3) Обоснование входных и выходной переменных задачи проектирования РОБ.
4) Подготовка данных для формирования обучающих выборок нейронной сети.
5) Разработка нейронной сети.
6) Настройка (обучение) нейронной сети.
7) Тестирование нейронной сети и проверка её адекватности.
2. Материалы и методы
3. Результаты
3.1. Анализ обзора работ по теме исследований
В работе использованы методы технической эксплуатации автомобилей и транспортнотехнологических машин [5]. Задача решалась с учётом неопределённостей в данных, для формализации этих условий применялись методы теории нечётких множеств [6]. Для разработки интеллектуальной системы в виде нейронной сети использовались продукционные нейронечёткие сети гибридного типа ANFIS (Adaptive Neuro-Fuzzy Inference System) [7], [8], [9].
Совершенствованию в области технической эксплуатации машин посвящены работы ряда учёных. В их числе можно назвать профессоров, докторов технических наук Кузнецова Е. С., Крамаренко Г. В., Абрамова С. И., Баловнева В. И., Волкова С. А., Воронкина И. И., Грифа М. И., Евтюкова С. А., Зорина В. А., Рейша А. К., исследовавших проблему проектирования, а также вопросы, касающиеся технического перевооружения и реконструкции РОБ, — Бабусенко С. М., Бледных В. В., Курчаткина В. В., Левитского И. С., Тельнова Н. Ф., Черноиванова В. И., Шабашова А. А., в области технологии и организации обслуживания техники — Кравченко И. Н.,
Коломейченкова А. В., Чепурина А. В. и др.
Ремонтно-обслуживающие предприятия являются сложными техническими системами. Решению проблем ТО и Р с помощью разработки моделей на основе управления сложными техническими системами уделялось внимание в научных работах Алябьева В. И., Камусина А. А., Леонова Л. В., Митрофанова А. А., Овчинникова М. М., Серова А. В., Фильчакова В. В., Юркова Н. К. и других учёных, выдвигающих научные идеи для решения этих задач.
При проектировании РОБ такими авторами, как Грундиг К. Г., Евтюков С. А., Курчаткин В. В., Черноиванов В. И., прорабатывается детальный прогноз использования техники на перспективу, который закладывается при составлении производственной программы. Производственная программа является основой проектирования, а её разработка вызывает сложности, т. к. большинство параметров процесса ТО и Р носят стохастический характер. Отличительной чертой проектирования РОБ является наличие большого объёма вариативной входящей информации, также, как правило, имеющей случайный характер. Поэтому предмет и методика проектирования РОБ подвержены изменениям под действием различных факторов и параметров.
При проектировании РОБ наибольшую проблему составляет неопределённость используемых данных. Традиционно эта проблема решается статистическими методами, но в условиях недостаточности данных и не репрезентативности статистических выборок, необоснованности назначения статистических распределений выбор решений остаётся не решённой в полной мере проблемой.
Для учёта неопределённостей давно и успешно применяются методы нечёткой логики, интеллектуальных систем, которые могут быть реализованы в виде нейронных сетей или экспертных систем.
Так, например, в работе [10] рассмотрен вопрос использования свёрточной нейронной сети для интеллектуального мониторинга состояния дизельных двигателей. Также новый подход для двигателей с искровым зажиганием с использованием нейронных сетей изложен работе [11], которые реализованы в среде SIMULINK.
Краткий анализ опыта использования методов на основе нечёткой логики [3], [4] и нейронных сетей [8], [9], [10], 11] показывает их эффективность, но в российской науке в области технической эксплуатации, с целью проектирования РОБ такие работы практически отсутствуют.
Таким образом, создание способов проектирования РОБ, в которых учитываются факторы неопределённости, является значимой научно-практической проблемой, однако недостаток работ по этой теме не позволяет эффективно решать проблему, что не способствует дальнейшему совершенствованию технической эксплуатации парка машин.
-
3.2. Постановка задачи определения площади зоны постов для ТО и Р с использованием нейросети
При технологическом проектировании РОБ определяются основные параметры. В их числе следует указать расчёты количества технологических постов для выполнения ТО и Р и площади производственного корпуса, в первую очередь зоны постов, S . Площадь определяется на основе данных о величине численности парка N , годового пробега (наработки) парка машин, L. Может учитываться класс машин, т. к. от класса машин зависит их трудоёмкость ТО и Р. Трудоёмкость в различных условиях эксплуатации также будет различной.
Расчётно-справочные данные по годовой трудоёмкости содержания парка рассчитываются по нормативным показателям. Особенности эксплуатации определяются дорожными условиями, Д, климатическими условиями, КЛ. Для их учёта используются соответствующие коэффициенты корректирования данных. Общая площадь производственного корпуса в первую очередь зависит от количества технологических постов для ТО и Р. Эта численность определяется исходя из численности персонала, одновременно работающего на посту. Также площадь зон постов ТО и Р зависит от габаритов, т. е. от класса машин.
Описанные параметры и принимаются исходными для известных методик проектирования РОБ, поэтому из них должны формироваться обучающие выборки в случае использования нейросетей.
Таким образом, формально постановку задачи можно записать следующим образом:
S = f (N, L, Д, КЛ) . (1)
Чтобы решать задачу, формализованную в уравнении (1) с использованием нейронных сетей, необходимо сформировать соответствующие обучающие выборки, которые будут содержать значения входных N, L, Д, КЛ и выходного S параметров.
В работе [9] количество примеров обучающего множества M в зависимости от количества входных переменных X рассчитывается по формуле
M = 7 X + 15 . (2)
Но автором рекомендуется определённое, эмпирически достаточное количество примеров в 2—4 раза меньше. В дальнейшем для рассматриваемой сети обучение, т. е. обеспечение приемлемой точности, было достигнуто на 24 примерах.
Все основные параметры РОБ проектируются в зависимости от условий эксплуатации парка. В известных методиках [5] эти условия подразделяются на категории. Анализ категорий приведён в таблицах 1—3.
Таблица 1. Категории климатических условий эксплуатации [5]
Table 1. Climatic operating conditions categories [5]
|
Категория климатических условий эксплуатации |
||
|
1. Очень холодный |
4. Умеренно тёплый |
7. Жаркий сухой |
|
2. Холодный |
5. Умеренно тёплый влажный |
8. Очень жаркий сухой |
|
3. Умеренно холодный |
6. Тёплый влажный |
9. Умеренный |
Учитывая, что характеристики «жаркий сухой», «очень жаркий сухой» и «умереннохолодный» имеют одинаковые значения коэффициентов корректирования, то они могут быть объединены в одну категорию. Следовательно, можно выделить пять категорий природноклиматических условий эксплуатации техники, которые обозначим в дальнейшем как I, II, III, IV, V.
Категория дорожных условий эксплуатации имеет аналогичную градацию: I, II, III, IV, V.
В настоящей работе принята пятая группа технологически совместимых машин, т. е. однотипный парк техники. Численность персонала постов также принята фиксированной — четверо рабочих на посту. При изменении этой численности в практике имеется возможность пересчитать количество технологических постов, следовательно, площадь зоны постов.
Таблица 2. Коэффициент корректирования нормативов в зависимости от природноклиматических условий эксплуатации К усл [5]
Table 2. Estimated coefficient of standards adjustment depending on natural and climatic conditions of operation Cest [5]
|
Характеристика климата района |
Значение коэффициента для норматива |
|||
|
Периодичность ТО, К усл. то |
Удельная трудоёмкость, к усл. тр |
Пробег до КР, К усл. кр |
Расход запчастей, К усл. зп |
|
|
Умеренный |
1,0 |
1,0 |
1,0 |
1,0 |
|
Умеренно-тёплый, умеренно-тёплый влажный, тёплый влажный |
1,0 |
0,9 |
1,1 |
0,9 |
|
Жаркий сухой, очень жаркий сухой |
0,9 |
1,1 |
0,9 |
1,1 |
|
Умеренно-холодный |
0,9 |
1,1 |
0,9 |
1,1 |
|
Холодный |
0,9 |
1,2 |
0,8 |
1,25 |
|
Очень холодный |
0,8 |
1,3 |
0,7 |
1,4 |
Таблица 3. Группы технологически совместимых автомобилей для ТО и Р [5]
Table 3. Groups of technologically compatible vehicles for maintenance and repair [5]
|
Группа |
Базовые модели групп |
|
I |
АЗЛК, ИЖ. ВАЗ, ЗАЗ, ЛуАЗ |
|
II |
«Волга», РАФ, УАЗ, ЕрАЗ |
|
III |
ПАЗ, КАвЗ, ГАЗ, ЗИЛ, КАЗ |
|
IV |
ЛАЗ, ЛиАЗ, «Икарус» |
|
V |
Урал, МАЗ, КамАЗ, КрАЗ |
В зоне ТО и Р количество постов К П рассчитывается по формуле [5]
К П
Т Т • Б • F
Д г • Р • t cM • В • С ’
где ТТ — годовая трудоёмкость данного вида ТО, чел.-ч; Б — коэффициент неравномерности поступления машин; F — коэффициент, учитывающий объём работ, выполняемых на производственных участках; ДГ — число рабочих смен поста в год; Р — число рабочих, одновременно работающих на посту; tсм — продолжительность рабочей смены; В — коэффициент, учитывающий занятость на посту; С — коэффициент использования времени поста.
Следует отметить, что почти все исходные данные в формуле (3) предварительно рассчитываются в зависимости от численности парка, пробега и условий эксплуатации. В этом смысле такие проектные процедуры являются промежуточными при использовании нейронной сети, которая позволяет напрямую найти выходную величину.
С учётом постановки задачи, данных таблиц 1—3 входными и выходными данными были определены следующие:
-
— численность парка, N (от 10 до 200 ед.);
— годовой пробег парка, L (от 500 до 8200 тыс. км);
-
— категория климатических условий, КЛ (от I до V);
-
— категория дорожных условий, Д (от I до V).
-
2.4. Разработка нейронной сети
Выходной переменной является площадь, S , зоны постов для ТО и ремонта S (от 100 до 2400 м2).
В существующей методике проектирования РОБ площадь зоны постов рассчитывается с учётом габаритных размеров машин (в данном случае принимая данные лесовозного автомобиля КамАЗ длиной 10,5 м и шириной 2,5 м) и минимально допустимых расстояний от элементов здания и между машинами.
Сформированные по результатам известных проектных расчётов обучающие выборки приведены в таблице 4.
Для создания интеллектуальной системы используем адаптивную продукционную нейронечёткую сеть ANFIS (Adaptive Network-based Fuzzy Inference System). Существенным преимуществом сети этого типа является включение свойств нейронных сетей и нечётких систем. Схема построения нейронечёткой сети в среде Matlab приведена на рисунке 1.
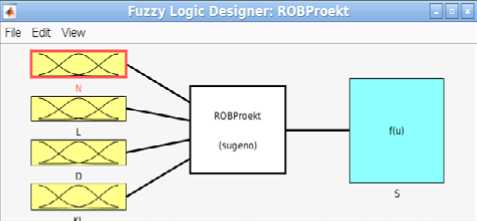
Рисунок 1. Схема нейронечёткой сети
Figure 1. Scheme of a neural fuzzy network
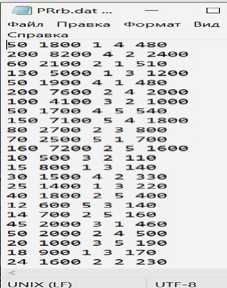
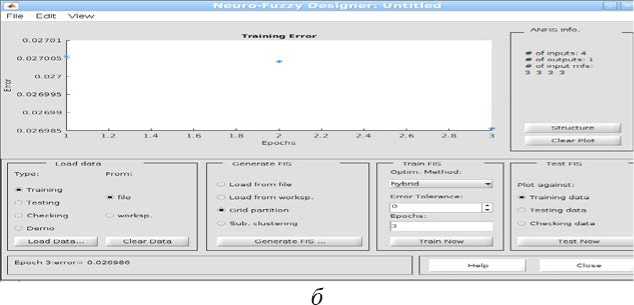
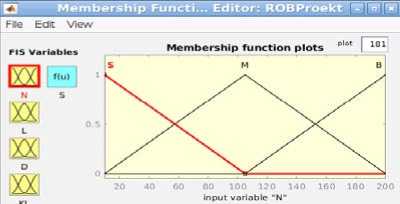
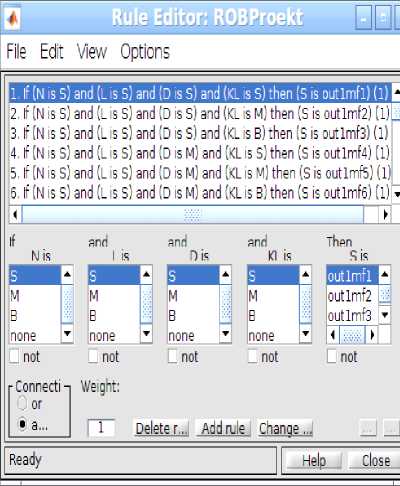
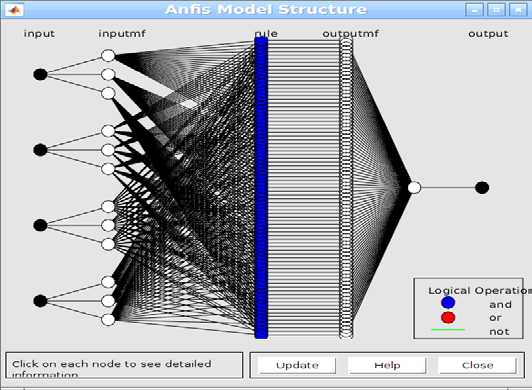
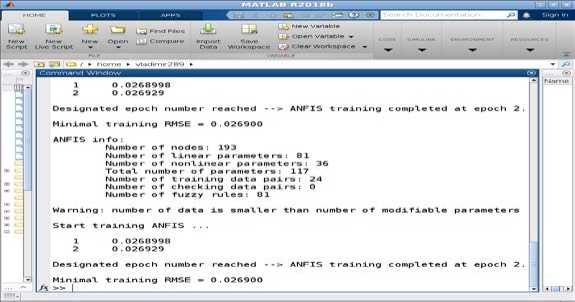
Для реализации модели использовано приложение anfisedit — один из Toolbox системы MATLAB [6]. Процесс создания сети ANFIS показан на рисунках 2 а—е . Сформированный в виде матрицы файл исходных данных в формате *.dat (рисунок 2 а ) загружается в Matlab (рисунок 2 б ). Задаются тип нечёткого вывода, в данном случае по методу Сугено, и входные переменные в виде лингвистических переменных (рисунок 2 в ). После генерации структуры сети (рисунок 2 г ) создаётся база правил (рисунок 2 д ). Результаты обучения по каждой эпохе выводятся в рабочую область программы (рисунок 2 е ). В данном случае после второй эпохи обеспечивается точность до второго знака после запятой, что соответствует расчёту площади с точностью до 1 м2.
Таблица 4. Перечень обучающих выборок
Table 4. List of training samples
|
№ п/п |
Численность парка N, ед. |
Пробег, L , тыс. км |
Категория дорожных условий, Д |
Категория климатических условий, КЛ |
Площадь зоны постов, S |
|
1 |
50 |
1800 |
I |
IV |
480 |
|
2 |
200 |
8200 |
IV |
II |
2400 |
|
3 |
60 |
2100 |
II |
I |
510 |
|
4 |
130 |
5000 |
I |
III |
1200 |
|
5 |
50 |
1900 |
IV |
I |
480 |
|
6 |
200 |
7600 |
II |
IV |
2000 |
|
7 |
100 |
4100 |
III |
II |
1000 |
|
8 |
50 |
1900 |
IV |
V |
540 |
|
9 |
150 |
7100 |
V |
IV |
1800 |
|
10 |
80 |
2700 |
II |
III |
800 |
|
11 |
70 |
2500 |
V |
I |
700 |
|
12 |
160 |
7200 |
II |
V |
1600 |
|
13 |
10 |
500 |
III |
II |
110 |
|
14 |
15 |
800 |
I |
III |
140 |
|
15 |
30 |
1500 |
IV |
II |
330 |
|
16 |
25 |
1400 |
I |
III |
220 |
|
17 |
40 |
1800 |
II |
V |
400 |
|
18 |
12 |
600 |
V |
III |
140 |
|
19 |
14 |
700 |
II |
V |
160 |
|
20 |
45 |
2000 |
III |
I |
460 |
|
21 |
50 |
2000 |
II |
IV |
500 |
|
22 |
20 |
1000 |
III |
V |
190 |
|
23 |
18 |
900 |
I |
III |
170 |
|
24 |
27 |
1600 |
II |
II |
230 |
а
в
д
г
е
Рисунок 2. Создание нейронной сети: а — задание файла *.dat с исходными данными; б — загрузка обучающих примеров в систему; в — определение лингвистических переменных для исходных переменных (показано для переменной численности парка N ); г — генерация структуры нейронной сети; д — создание базы правил; е — процесс обучения нейросети
Figure 2. Creation of a neural network: a - setting a * .dat file with initial data; b - loading of training examples into the system; c - definition of linguistic variables for the initial variables (shown for the variable number of the park N); d) - generation of the neural network structure; e - rule base creation; e - the process of a neural network training
Resources and Technology 18 (4): 46-60, 2021 ISSN 2307-0048
3. Обсуждение
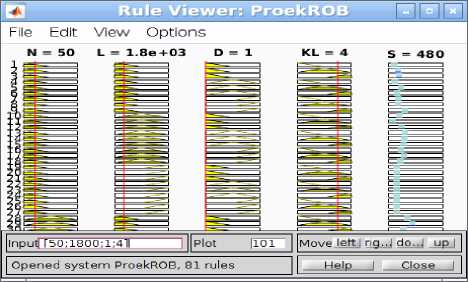
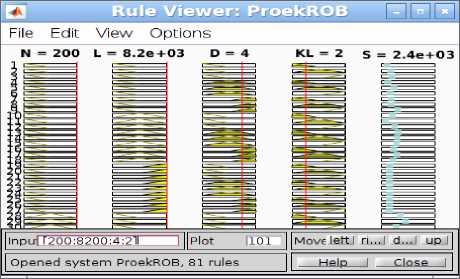
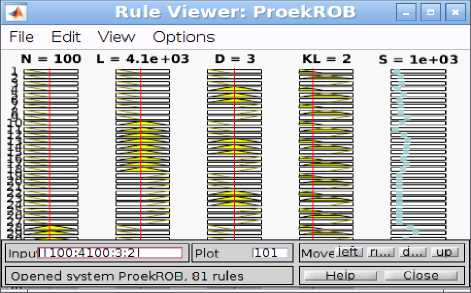
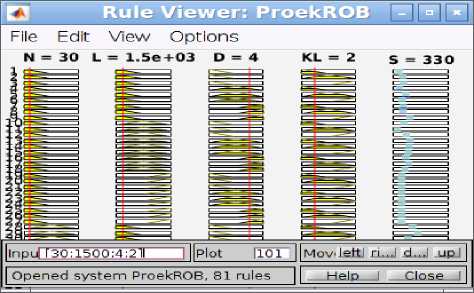
После построения сети была выполнена проверка её адекватности на тестовых выборках. Значения для тестовых наборов задавались в поле Input визуального интерфейса процедуры Rule Viewer пакета MATLAB (рисунки 3 а—г ) (результаты приводятся в верхней строке данных).
Так, для выборки Х1 = 50, Х2 = 1800, Х3 = 1, Х4 = 4 получено по модели значение S = 480 м2 (рисунок 3 а ), для выборки Х1 = 200, Х2 = 8200, Х3 = 4, Х4 = 2 получено по модели значение S = 2400 м2 (рисунок 3 б ), для выборки Х1 = 100, Х2 = 4100, Х3 = 3, Х4 = 2 получено по модели значение S = 1000 м2 (рисунок 3 в ), для выборки Х1 = 30, Х2 = 1500, Х3 = 4, Х4 = 2 получено по модели значение S = 330 м2 (рисунок 3 г ), что совпадает с выходными значениями выборок. Следует отметить, что такая точность будет наблюдаться для исходных данных, которые близки к значениям обучающих выборок. Возможны случаи больших отклонений результата, когда входные переменные значительно отличаются от обучающих. Но при больших отклонениях можно провести переобучение сети с новыми данными.
а
б
в
Рисунок 3. Проверка настроенной нейросети на тестовых примерах: а—г — тестовые выборки и результаты
г
Figure 3. Checking a tuned neural network using test examples: a—d — test samples and results
Преимуществом предложенной сети является наличие базы правил, которая позволяет вносить различные корректировки без изменения структуры и программного кода модели, также большую гибкость модели обеспечивает использование лингвистических переменных для входных величин, которые также могут корректироваться. Кроме того, при необходимости учёта новых факторов нейросеть можно перенастроить на новый набор обучающих выборок, что делает её более универсальной и адекватной.
4. Заключение
В заключении можно отметить следующее:
-
— при выполнении проектов РОБ парка автомобилей, определении их основных параметров, назначении условий эксплуатации факторы неопределённости вносят значительную погрешность, а это даёт в практике недостаточно обоснованные решения;
— предложенная интеллектуальная система в виде нейронечёткой сети для проектирования РОБ учитывает неопределённости в условиях эксплуатации, отклонения от проектных исходных данных в процессе эксплуатации, поэтому является более адекватной реальным условиям и может быть рекомендована для использования в практике проектирования ремонтно-обслуживающих баз автомобилей.
Список литературы Нейронечеткая сеть для проектирования ремонтно-обслуживающих баз
- Пикалев О. Н., Верхорубов В. В. Методика повышения технической готовности городских автобусов за счёт оптимизации размеров и структуры зоны текущего ремонта пассажирских АТП // Автотранспортное предприятие. 2007. № 10. С. 46—53.
- Сергиенко Е. В. Оптимизация количества постов текущего ремонта с учётом неравномерности поступления автомобилей: Автореф. дис. ... канд. техн. наук. Тюмень, 2004. 20 с.
- Побединский В. В., Побединский Е. В. Интеллектуальная система определения количества постов ТО и ремонта. Ч. 1. Формализация неопределённостей в задаче // Ремонт. Восстановление. Модернизация. М.: ООО «Наука и технологии», 2019. № 4. С. 42—48. DOI: 10.31044 /1684-2561-2019-0-4-42-48.
- Побединский В. В., Рябкова Н. В., Асин К. П. Нечёткий вывод режимов технического обслуживания автомобилей // Автотранспортное предприятие. 2012. № 9. С. 38—42.
- ОНТП 01-91. Общесоюзные нормы технологического проектирования предприятий автомобильного транспорта. М.: Гипроавтотранс РСФСР, 1992. 92 с.
- PiegatA. Fuzzy Modeling and Control. Heidelberg, Physica-Verlag, 2001. 760 p. URL: https://doi.org/10.1007/978-3-7908-1824-6.
- MATLAB Release Notes for R2013a. MathWorks. URL: https://www.mathworks.com/help/simulink/ release-notes. Highlight (дата обращения: 15.02.2019).
- Хултен Дж. Разработка интеллектуальных систем / пер. с англ. В. С. Яценкова. М.: ДМК Пресс, 2019. 284 с.
- Ясницкий Л. Н. Нейронные сети — инструмент для получения новых знаний: успехи, проблемы, перспективы // Нейрокомпьютеры: разработка, применение [Nejrokompyutery: razrabotka, primenenie]. 2015. № 5. С. 48—56.
- WangRuihan, Chen Hui, Guan Cong. Random convolutional neural network structure: An intelligent health monitoring scheme for diesel en-gines // Measurement. 2021. Vol. 171.
- Shamekhi A.-M., Shamekhi A. H. A new approach in improvement of mean value models for spark ignition engines using neural networks // Expert Systems with Applications. 2015. Vol. 42. Issue 12, 15 July. P. 5192—5218.
