Некоторые задачи экономико-математического моделирования

Автор: Максимов В.П., Поносов Д.А., Чадов А.Л.
Журнал: Вестник Пермского университета. Серия: Экономика @economics-psu
Рубрика: Математические и инструментальные методы в экономике
Статья в выпуске: 2 (5), 2010 года.
Бесплатный доступ
Рассматриваются некоторые задачи экономико-математического моделирования - задачи управления и задачи корректной разрешимости для динамических моделей в виде систем с запаздыванием - как для непрерывного, так и для дискретного времени. Для систем с непрерывным временем рассматривается влияние последействия в канале управления на общие затраты по целевому управлению системой. Для систем с дискретным временем рассматривается возможность коррекции противоречивых задач динамического планирования на основе подхода, предложенного для статических моделей акад. И.И. Ереминым.
Экономико-математические модели, системы с последействием, задачи управления
Короткий адрес: https://sciup.org/147201198
IDR: 147201198 | УДК: 517.9:
Текст научной статьи Некоторые задачи экономико-математического моделирования
Исследование задач управления конкретными социально-экономическими системами (регион, крупное предприятие, коммерческая структура, отрасль и т.п.) предполагает наличие специального модельного, математического и компьютерного инструментария. Подходы, использующие адекватные экономико-математические модели и современные методы их исследования (см., например, [1,6]), дают возможность найти пути и методы достижения целей, сбалансировать цели и средства их достижения.
Напомним необходимую для дальнейшего постановку классической задачи управления для системы с непрерывным временем. Для дифференциальной системы (Lx)(t) ^ x(t) + A(t)x(t) = F(t)u(t) + f (t), t e [0, T]
требуется найти управление u , переводящее систему из заданного начального состояния x (0) = а в заданное конечное состояние x(T) = в . Задачам управления для обыкновенных дифференциальных систем и систем с запаздыванием посвящена обширная литература (см., например, [2] и приводимый там библиографический список). В экономической динамике возникает более общая задача управления, в которой цель управления задается системой линейных функционалов, а динамика описывается функционально-дифференциальными уравнениями [5].
Сначала мы приводим необходимые сведения из теории функционально дифференциальных уравнений (ФДУ) и формулируем условия разрешимости общей задачи управления. На основе этих результатов предлагаются соотношения для оценки влияния запаздывания в канале управления на величину ресурса управления, необходимого для решения поставленной задачи.
Для систем с дискретным временем рассматривается возможность коррекции противоречивых задач динамического планирования на основе подхода, предложенного для статистических моделей акад. И.И.Ереминым.
Пусть D и B – банаховы пространства и D изоморфно прямому произведению B× Rn .
Уравнение
L x = f (1)
с линейным ограниченным оператором L : D ^ B называется линейным абстрактным функционально-дифференциальным уравнением (АФДУ). Теория уравнения (1) систематически изложена в [1,6,7]. Зафиксируем изоморфизм J = {Л, Y}: B х Rn ^ D и обозначим через J-1 = [3, r ] обратного оператора. Здесь Л: B ^ D, Y: Rn ^ D и
-
3 : D ^ B , r : D ^ Rn - соответствующие
компоненты операторов J и
J { z , а } = Л z + Y a g D, z g B , a g Rn , J - 1 x = { 3 x , rx } g B х Rn , x g D .
Система
3x = z, rx = a(2)
называется главной краевой задачей. Таким образом, для любого {z, a} g B х Rn x = Λz + Yα(3)
является решением системы (2). Равенство (3) дает представление оператора L :
Lx = L( Лz + Ya) = Qz + Aa, где так называемая главная часть оператора L , - оператор Q: B ^ B и конечномерный оператор A: Rn ^ B определены равенства-ми Q = LΛ и A = LY . В рамках общей теории уравнения (1) оператор Q предполагается фредгольмовым (представимым в виде суммы компактного и обратимого операторов).
Рассмотрим общую краевую задачу
Lx = f , £x = в (4)
с линейным ограниченным вектор- функционалом £ = p^,...,^]: D ^ RN. Крае-задача (4) как объект исследования находится в центре внимания общей теории АФДУ. В случае, когда N= n и задача (4) однозначно разрешима для любого {f, в} g B х Rn, справедливо представление ее решения в виде x = Gf + X в.(5)
Оператор G: B ^ D называется оператором Грина, оператор X: Rn ^ D,- фундаментальным вектором. Пусть главная краевая задача
Lx = f , rx = α(6)
однозначно разрешима. В таком случае, обозначая через G оператор Грина этой задачи, имеем представление x=G f +Xα(7)
общего решения уравнения Lx = f , считая, что α – произвольный элемент пространства Rn . Из представления (7) следует, что однозначная разрешимость задачи (4) эквивалентна однозначной разрешимости алгебраической системы XX a = в - £Grf. Таким образом, краевая задача однозначно разрешима тогда и только тогда, когда обратима матрица XX .
Рассмотрим абстрактную задачу управления
Lx = Fu + f , rx = a , £x = в , (8)
где управление u принадлежит гильбертову пространству H , F : H ^ B - линейный ограниченный оператор, £ = [£^...,£N] - целевой вектор-функционал, определяющий цель управления: x = β . Приведем здесь теорему о разрешимости задачи (8).
Определим линейный ограниченный функционал A .: H ^ R , i = 1,..., N , равенством A , u = £ i GrFu . Очевидно, что можно представить этот функционал в виде скалярного произведения: A , u = ^ i ,,u , где iz g H -элемент, порождающий A : H ^ R .
ТЕОРЕМА 1 ([6]). Задача управления (8) разрешима для любых f g B , aG Rn, в g R n тогда и только тогда, когда обратима матрица
M = {(i, i } .
И i j Di,j =1,..., N
N
Управление u0 = ^ Y h ■, i =1
где col ( y ,..., у N) = M -1[ в — Grf — X a ], решает задачу (8).
В качестве основной реализации пространства D мы будем рассматривать пространство D =AC - пространство абсолютно непрерывных функций
-
x : [0, T ] ^ Rn . В этом случае имеем:
x(t ) = J x ( s ) ds + x (0), B = L -пространство суммируемых по Лебегу функций
T z :[0,T] ^ Rn ,|| z ||L =£ ||z(s)||R„ds,
( Л z)(t ) = f z(s ) ds , Y = E , 6 x = x , rx = x (0). ' ' ' J о ' '
Здесь и всюду ниже E – единичная матрица. Изоморфизм между пространством AC и прямым произведением L× Rn играет основополагающую роль в теории функционально-дифференциальных уравнений и дает возможность сводить задачи в пространстве AC к задачам в пространстве L . Систематическое изложение теории краевых задач и задач управления в пространстве AC дано в [1].
Рассмотрим функционально-дифференциальную систему
(L )( t ) = f ( t ), t e [0, T ], (9)
где L : AC ^ L - линейный ограниченный оператор с главной частью вида
( Qz )( t ) = z ( t ) - [ K(t , s ) z ( s ) ds. J 0
Здесь элементы klj (t, s) ядра K(t, s) измеримы на множестве {(t,s) :0
| klJ (t,s)| < k(t), i, j = 1,...,n, где функция к(-) суммируема на [0, T]. Заметим, что системы вида (9) охватывают многие классы динамических моделей, включая дифференциальные системы с сосредоточенным и/или распределенным запаздыванием и интегро-дифференциальные системы.
Пространство всех решений однородной системы (Lx )( t ) = 0, t e [0, T ], имеет размерность n .
Пусть { x 1 ,..., xn } - базис в этом пространстве.
t x (t) = X (t )a + j C (t, s) f (s) ds, (10)
где C ( t , s ) - матрица Коши.
Пусть £ : AC ^ RN - линейный ограниченный вектор-функционал. Имеет место
T
представление
£ x = j Ф ( s ) x ( s ) ds + T x (0)
, где
элементы измеримой N× n- матрицы Φ ограничены в существенном, а Ψ –
N × n - матрица с вещественными элементами. Рассмотрим задачу управления
Lx = Fu + f , x (0) = a , £ x = в .
Здесь F: L2 ^ L - линейный ограниченный оператор, L – пространство суммируемых с квадратом функций u : [0, T] ^ Rr , в котором скалярное произведение определено
T
Uu , v) = j u 1 ( t ) v ( t ) dt , где
⊥
⋅ -
транспонирования. В задаче равенством сим- вол
(11) цель
управления задается вектор-функционалом
£ : AC ^ R N , который на траектории системы
Lx = Fu + f под действием управления должен принимать заданное значение β . Критерий разрешимости такой задачи управления дает приводимая ниже теорема. Для ее формулировки введем обозначения:
T
0 ( s ) = Ф ( s ) + | ф ( ^ > C ^ ( £ , s ) d ^ ,
s
W = j [ F * 0 ]( s )[ F * 0 ] 1 ( s ) ds , 0
F * : L * ^ L 2 - оператор, сопряженный к F .
ТЕОРЕМА 2 ([6]). Задача управления (11) разрешима тогда и только тогда, когда линейная алгебраическая система
T
W . Y = в - j 0 ( s ) f ( s ) ds -T- a (12)
разрешима относительно N - вектора
-
Y . Каждое решение / 0 системы (12) определяет управление, решающее задачу (11):
-
3. Зависимость управляющей
u ( t ) = [ F W ( t ) - / 0 . (13)
программы от запаздывания
Опишем зависимость управления и расходов на него (по норме пространства L ) от запаздывания для случая классической задачи управления (перевод из начального состояния x (0) = 0 в конечное состояние x(T ) = в ), считая запаздывание τ в цепи управления постоянным:
Lx = F u ; x (0) = 0; x(T ) = в , (14)
где ( F u )( t ) = F(t )(T u )( t ), (Т мл Z u ( t-T), t e [ T , T ],
( T u )( t ) = i n ( m ,
I 0, t e [0, т ].
Для задачи (14) матрица 0(s) = C(T, s), и для построения управления (13) остается найти сопряженныи оператор F : L ^ L2.
Используя равенство
_ х ( 1 Отсюда C (3, s ) =
I 0
J ( s ) ] es — 3 J ,
т получаем
J z 1 ( t ) F ( t ) и ( t — т ) dt = J x [0> t _ , ] ( s )[ z 1 ( s + т ) F ( s + т )] и ( s ) ds ,
W ( т ) = 2 Г f J 2( s + т )
{ ^ J ( s + т ) es + т
J(s + т)es+т—3 [ , 2 2 ds + e 2( s+т -3) I
( F *z )( s ) = X [0, Tт ( s ) F 1 ( s + т ) z ( s + т ).
Отсюда для «матрицы управления»
3— т
+J
2 —т
к , ds — 0 e 2( s + т " 3) J
|
W = W ( т ) имеем представление |
f 3 — т + 2 e — 2 — 1 e "'— 2) |
1 e -1 +1 e 2т 5" |
|
T |
2 2 |
2 2 |
|
W = J Z p, T т] ( s ) C (T , s + т ) F ( s + т ) F 1 ( s + т )С 1 ( T , s + т ) ds = = 0 |
1 1 + 1 ^2 т —5 — e + — e |
1[1 — e2(r — 3)] |
|
T —т |
I 2 2 |
2 J |
,
= J C(T , s + т )F ( s + т )F 1 ( s + т ) C 1 (T , s + т )ds • 0
Таким
разрешима для det W( т ) ^ 0 .
образом, всех таких
Управляющая
задача (14)
т е [0, T ] , что
программа
определяется равенством (13):
J F 1 ( t + т ) C 1 ( T , t + т ) W -1 ( т ) Д , t е [0, T — т ]; U (t ) = 1
т I 0, t е ( T — т , T ].
«Расходы на управление» S ( т ), как функцию
параметра т , оцениваемые по норме
пространства L , можно вычислить:
S ( т ) = | Ы1 4 J и 1 ( t ) и т ( t ) dt I
•
Очевидно, характер этой зависимости определяется конкретными особенностями системы управления - матрицей Коши C ( t , s ), матрицей F ( t ) и целевыми значениями компонент требуемого финального состояния в .
Рассмотрим систему управления с запаздыванием по состоянию и по управлению
X ( t ) = x 2 ( t — 1);
x 2( t ) = — x 2( t ) + и ( t — т ), t е [0,3];
X 1 (0) = 0; x 2 (0) = 0; X 1 (3) = Д ; x 2 (3) = Д 2 ;
x 2 ( £ ) = 0, и ( £ ) = 0, если £ < 0.
Для этого случая имеем F(t ) = col (0,1),
r = 1, матрица Коши определяется равенством [7]
t' 3
J Z [1,3j ( £ ) Z [0^ —1] ( s ) exP(1 — - + s ) d £
•
s exp( s — t) j
C ( t , s ) =
Вычисляя интеграл, определяющий элемент c2 (t, s) , для J(s) = c2 (3, s) получаем
1 — es — 2, s е [0,2],
0, s е (2,3].

и т ( t ) = (0,1) 1
[ J ( t + т )
e
0 3 , Г Д
, W ( т )
+ т — 3 J I в
•
Приведем точное описание S 2( т ) для
Д = ^2 = 4:
S 2( т ) = 18( — 10 + 14 т — 20 тe2 т — 6 + 6 e — 2 — 4 e4 т — 10 — 3 e4 т — 1
—
— 28 в т — 2 — 9 e ' : — 4 + 2 e - l + 16 e2т — 5 + 6 e2т — 6 + 4 в т — 5 — 4 e -‘т —
— 22 e 4 т — 11
+ 8 т е 3 т — 9
—
2 e -3 — 2 e4 т — 9 + 8 т e т — 4 — e2 т — 8
— e4т 8 + 16 e 2 т + 4 e:
—
4 e 2 т — 4 т + 4 e 3 т — 10 +
— 4 т 2 + 20 e т — 3 + 8 e 3
—
— 8 e ! — 3 т — 12 e ! — 4 + 2 e4 т — 12 т + 2 e4 г — 10 т + 4 e 2 т — 7 т + 4 e 4 т —" т
—
— 4 e2 т — 5 т — 12 e 3 т — 9 — 8 e2 т — 7 + 28 e 3 т — 8 + 4 т2 e 2 т — 6 — 2 e ~2т —
— 8 т e 3 т — 8)/( — 9 + 12 т — 32 т e2 т — 6 + 6 e "2 + 22 e 4 т — 10
— 24 e т — 2 — 10 e 2 т — 4 + 28 e2т — 6 — e — 4 — 10 e 2 т — 8
— 4 e 2 т — 4 т — 8 eЗ г — 10
—
16 e6т — 16
—
e4т - 8
—
—
25 e 4 т — 12
—
—
4 т2 e4т — 12
—
40 e 5 т — 14 + 16 e т — 2 т
—
■4 т 2 + 8 e 3 т — 6 + 8 e r — 4 + 20 e 4 т ^г + 4 e, т — |0 т + 4 т в 2 т — 8 +
+ 64 eЗ т — 8 + 16 тe5 т — 14 + 8 т2 e2 т — 6 — 4 e — 2 т — 8 e5 т — 12 — 32 тeЗ т — 8)
Вид зависимости S ( т ) представлен на рис. 1.
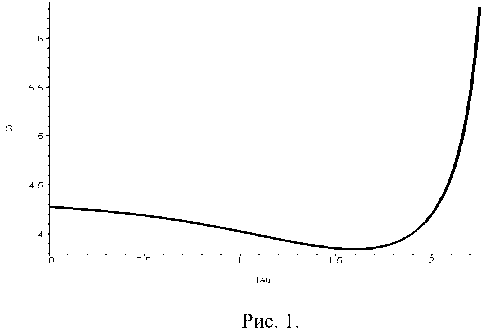
Заметим, что в точке т 0 е [2,390; 2,391] det W ( т ) = 0 и задача управления решения не имеет.
При экономико-математическом моделиро-вании динамические модели с дискретным временем часто возникают как
результат эконометрического моделирования на базе реальной статистической информации.
Рассмотрим неавтономную систему x (t +1) = ^ A(t, i) x (i) + f (t +1), t = 0,..., T -1, i=0
(15) где x(t ) g Rn, t = 0,..., T , A ( t , i ) - n x n - матрицы.
Данная система, дополненная начальными условиями x (0) = a , имеет единственное решение. В частном случае A(t , i ) = A (i ) V t коэффициенты системы (15) могут быть результатом стандартных процедур эконометрического моделирования.
В составе экономико-математической модели система (15) учитывает лишь динамические связи переменных, не включая в себя статические ограничения, такие, например, как балансовые ограничения.
Добавление в модель даже линейных статических ограничений вида
Bx < d , (16) где B - матрица размерности m x nT , d -вектор-столбец размерности m , а x = col ( xT ( 0 ) , xT ( 1 ) ,..., xT ( T ) ) , может привести к тому, что система (15)-(16) окажется несовместной.
В этом случае возникает задача коррекции построенной модели. Систематическая теория таких задач изложена в [3,4]. Одной из причин корректировки может служить тот факт, что коэффициентами системы (15), построенной в результате эконометрического моделирования, являются не точные фактические коэффициенты, а их оценки, полученные по статистической информации. Поэтому задачу коррекции можно поставить в форме отыскания таких поправок h к данным коэффициентам, которые приведут к совместности системы (15)–(16) в целом. При этом имеет смысл следить за тем, чтобы измененные коэффициенты попали в доверительные интервалы, построенные для фактических значений коэффициентов модели по исходным оценкам.
Коррекцию ограничений (16) можно проводить также в виде введения штрафа за их нарушение.
Приведем систему (15) к виду, удобному для коррекции, – запишем ее в виде:
x = Px + F , (17)
где
P =
E n
A ( 0,0 )
A ( 1,0 )
A ( 1,1 ) 0
1 A ( T - 1,0 ) A ( T - 1,1 )
0 0
A (T -1, T -1) 0
F = col 0,...,0, fT ( 1 ) ,..., fT ( T )
I
Введя обозначение
K = ( E nT +»" P ) =
' En - En 0 0 00 '
- A (0,0) En 0 00
= - A (1,0) - A (1,1) En 00
cA ( T - 1,0 ) - A ( T - 1,1 ) - A ( T - 1, T - 1 )
запишем (17) в виде
Kx = F.
В результате приходим к системе (18),(16), для которой в качестве коррекции может быть применен метод параметризации, разработанный И.И. Ереминым и
А.А. Ватолиным [3,4]. Параметризованная система, соответствующая системе (18),(16), запишется в следующем виде:
'( K + H , ) x = F - p ,
( B + H 2) x < d - p2
где H. = hiA ,
1 № ) nT,nT p1 = col (hj,nT-1, • • • , hnT,nT+1 ) ,
Hl ={ h J , j = nT + 1,..., nT + m, i = 1,..., nT ,
P 2 = col ( h nT + 1, nT + 1 , • • • , h nT + m , nT + 1 ) .
Количество параметров системы (19) составит ( nT + m )( nT + 1 ) . Так как для системы (16) коэффициенты матрицы B строго определены, коррекцию, как уже говорилось выше, можно проводить лишь в форме штрафов за отклонения от выполнения ограничений, т.е.
корректируя параметры р 2, при этом матрица
H будет нулевой. В силу специфического вида матрицы K число параметров будет совпадать с общим числом элементов матриц
A ( t , i ) .
Таким образом, вектор рассматриваемой модели размерность m + -—^— n 2.
параметров h будет иметь
Для системы (19) ставится следующая задача аппроксимации:
inf { Ф ( h )| h e M о S } , где S -допустимое множество параметров, M – множество параметров, для которых параметризованная система (19) имеет решение, Ф ( h ) - функция качества аппроксимации. Решение этой задачи дает оптимальный с точки зрения критерия Ф ( h ) вектор коррекции h.
Список литературы Некоторые задачи экономико-математического моделирования
- Азбелев Н.В., Максимов В.П., Рахматуллина Л.Ф. Введение в теорию функционально-дифференциальных уравнений. М.: Наука, 1991. 280 с.
- Андреева Е.А., Колмановский В.Б., Шайхет Л.Е. Управление системами с последействием. М.: Наука, 1992. 240c.
- Ватолин А.А. О симметрической аппроксимации несобственных задач линейного программирования//Несобственные задачи оптимизации. Свердловск, 1982. С. 67-74.
- Еремин И.И. Противоречивые модели оптимального планирования. М.: Наука, 1988.
- Максимов В.П., Румянцев А.Н. Краевые задачи и задачи импульсного управления в экономической динамике. Конструктивное исследование//Известия вузов. Математика. 1993. № 5. С. 56-71.
- Azbelev N.V., Maksimov V.P., Rakhmatullina L.F. Introduction to the theory of functional differential equations: methods and applications. N. Y: Hindawi Publishing Corporation, 2007. 314p.
- Azbelev N.V., Rakhmatullina L.F. Theory of linear abstract functional differential equations and applications//Memoirs on Diff. Equations and Math. Phys. 1996.v. 8. P. 1-102.
- Maksimov V.P. Theory of functional differential equations and some problems in economic dynamics//Proceedings of the Conference on Differential and Difference Equations and Applications. N. Y: Hindawi Publishing Corporation. 2006. P. 74-82.
- Maksimov V.P. On the property of controllability with respect to a family of linear functionals//Functional Differential Equations. 2009. v. 16 (dedicated to the memory of Michael Drakhlin), № 3. P. 517-527.
