Нелинейно-упругая деформация подводного трубопровода в процессе укладки

Автор: Елисеев Владимир Васильевич, Зиновьева Татьяна Владимировна
Журнал: Вычислительная механика сплошных сред @journal-icmm
Статья в выпуске: 1 т.5, 2012 года.
Бесплатный доступ
Поставлена и численно решена контактная задача, возникающая при укладке подводного трубопровода как нелинейно-упругого стержня. Рассмотрено влияние различных факторов: растяжения, сдвига, физической нелинейности материла, начального угла укладки, глубины погружения. Получено и использовано в расчетах новое выражение гидростатической нагрузки, действующей на свободный участок. Определены напряжения в трубе, нагрузка на судно, форма свободного участка и контактное давление.
Нелинейно-упругий стержень, контактная задача, гидростатическая нагрузка, численное моделирование, метод конечных разностей
Короткий адрес: https://sciup.org/14320599
IDR: 14320599 | УДК: 539.3
Nonlinear-elastic strain of underwater pipeline in laying process
The contact problem of laying of an underwater pipeline as a nonlinear-elastic rod is formulated and numerically solved. Influence of various factors, i.e., tension, shear, physical nonlinearity of the material, initial angle and depth, is considered. A new formula for hydrostatic loading is derived and used in calculations. Stresses in the pipe, loading on a vessel, form of the sagging part, and contact pressure are determined.
Текст научной статьи Нелинейно-упругая деформация подводного трубопровода в процессе укладки
Высокие стандарты безопасности подводных трубопроводов обуславливают актуальность математического моделирования их напряженно-деформированного состояния (НДС) [1–7]. Повреждение трубопровода может возникнуть уже в процессе его укладки с судна на дно. Расчет возникающего НДС с учетом различных факторов и нелинейностей — цель данного исследования. Линеаризованная задача поставлена и решена в [7].
Вследствие малости относительной толщины рассматриваемого участка трубопровода (порядка 10 - 3 ) можно использовать одномерные модели стержней как материальных линий Эйлера–Кирхгофа–Коссера [8–13]. Расчеты показали, что на свободном участке достаточно ограничиться использованием классической нелинейной модели без растяжения и сдвига, а на дне, при определении контактного давления, необходимо учитывать влияние поперечного сдвига [14]. Дно, как основание, считается горизонтальной плоскостью, жесткой и гладкой. Граница участка контакта устанавливается из соответствующих условий сопряжения. Для значительных глубин становится обязательным учет не только геометрической, но и физической нелинейности, поскольку бетон внешнего слоя трубопровода не подчиняется закону Гука. Особого внимания требует расчет гидростатической нагрузки на трубу. Встречающиеся упрощенные представления [2, 4, 5, 15] могут изменить решение и количественно, и качественно.
Предлагаемые в работе теория и методика расчета позволят оптимизировать процесс укладки подводных трубопроводов без перенапряжения на начальной стадии.
1. Постановка задачи и система уравнений
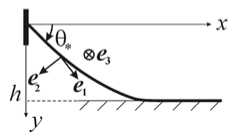
Трубопровод, представляющий собой двухслойную искривленную трубу из стали и бетона, моделируется полубесконечным стержнем, жестко закрепленным на левом конце (Рис. 1). Стержень, обладающий податливостью на изгиб, растяжение и сдвиг, нагружен собственным весом и внешним давлением жидкости. Расстояние h между закреплением и дном считается заданным; длина свободно провисающего участка l неизвестна и должна быть найдена. За отсчетную конфигурацию трубопровода принимается распрямленная форма стержня в ненапряженном состоянии.
Геометрическая форма стержня как материальной линии определяется зависимостью r ( 5 ) радиус-вектора r образующих эту линию точек от лагранжевой координаты 5 ; в начальном состоянии это r 0 ( 5 ) .
а
б
Рис. 1. Схема трубопровода ( а ) и его сечение ( б )
Поскольку 5 является дуговой координатой, то производная r0' ( 5 ) равна орту касательной t 0. В то же время с каждой частицей стержня как линии Коссера связана тройка ортов e i ( 5 ) ; в начальном состоянии обычно e i 0 = t 0 ( 5 ) . Вектор кривизны и кручения стержня Q ( 5 ) определяется равенствами e '= Q x e i . Тензор поворота P = e i e i 0 (по повторяющимся индексам производится суммирование) связывает направляющие орты до и после деформации: e i = P ■ e i 0.
Система уравнений нелинейной статики упругих стержней имеет вид [10, 11]
Q'+ q = 0, M' + r'x Q + m = 0,
к = Q - P ■ Q 0 = A ■ M + C ■ Q , Г = r '- P ■ r 0 = B ■ Q + M ■ C .
Здесь Q , M — векторы силы и момента в сечении с координатой s . Два первых уравнения описывают баланс сил и моментов при распределенных нагрузках q , m (силовой и моментной), другие соотношения вводят векторы деформации к , Г и связывают их с силовыми факторами посредством тензоров податливости A , B , C i . Вся система уравнений (1) может быть выведена из принципа виртуальной работы [10–13]. Соотношения упругости в (1) соответствуют физически линейной модели с квадратичной зависимостью энергии деформации П ( к i , Г i ) от своих аргументов. В случае физической нелинейности M = e i дП/дк i , Q = e i дП/дГ i , где к i = к e i , Г i = Г - e i , что также следует из принципа виртуальной работы.
Тензор А характеризует податливость на изгиб и кручение, тензор B — на растяжение и сдвиг, тензор C i выражает перекрестные связи. Вычисление тензоров податливости требует рассмотрения трехмерной модели стержня. При этом используются решения Сен-Венана, асимптотический метод и вариационный подход с аппроксимациями по сечению [10–13]. Простейшим вариантом представления тензоров является следующий: А = £ A i e i e i , B = ^ B i e i e i , C i = 0 ; здесь отличны от нуля шесть податливостей: на кручение — A 1 ; на изгиб — A 2 , A 3 ; на растяжение — B 1 ; на сдвиг — B 2 , B 3 .
Далее рассмотрим деформацию трубопровода в вертикальной плоскости xy при m = 0 с простейшим вариантом тензоров податливости. В плоскости xy (Рис. 1, а ) лежат векторы Q , q , r , Γ , e 1 , e 2 . Перпендикулярны плоскости (то есть параллельны декартовой оси z с ортом k = e 3) векторы M , к . Вместо тензора поворота достаточно взять 9 ( 5 ) — угол между осью x и ортом e 1 . С учетом сделанных допущений уравнения (1) упрощаются: Q ' + q = 0, M ' + k ■ r ' x Q = 0, 0 ' = AM , ( A = A 3 , M = A '9' = A -1к ), r ' = e 1 + B ■ Q , e 1 = i cos0 + j sinO, B = B 1 e 1 e 1 + B 2 e 2 e 2 , e 2 =- i sin0 + j cos0. В проекциях на декартовы оси x , y имеем систему
Qx+ qx = 0, Qy+ qy = 0, M' + x'Qy -y'Qx = 0, 9' = AM, x' = cos 9 + BQ + BxyQy, У' = sin 9 + BO + BQ,
xx x xy y yx x yy y
BTx = B , cos2 9 + B , sin2 9 , B,„ = B. sin2 9 + B , cos2 9 , B =( B. - B ,) sin 9 cos 9 .
xx 1 2 yy 1 2 xy 12
2. Контактная задача с упрощенной нагрузкой
Сначала полагаем, что гидростатическая нагрузка постоянна. Тогда
A * (0, 5 < 1 ,
qx = 0, qy = w + {-p (5 ) , 5 > 1,
где w = const — погонный вес трубопровода в воде [15]. Контактное давление p ( 5 ) и координата 5 = 1 конца свободного (провисающего) участка не известны. Очевидно, что в системе уравнений (2) Q x = 0 .
На участке контакта имеем y ^ h ^ sin 9 + B yy Q y = 0 ^ Q y =- sin 9/ B yy ; p = w + Q y ; М ' + x’Qy = 0 ^ 9" + A ( cos 9 + B xy Q y ) Qy = 0 ^9" = ( AB 2/ B yy ) sin 9 cos 9 . Здесь уравнение для 9 ( 5 ) допускает понижение порядка до первого:
9’ 2 + AB 2/ [ ( B i - B 2 ) B yy ] = const = A /( B - B 2 ) ^ 9' = - JA/b; sin 9 j (3)
при этом используется условие 9 ( » ) = 0.
Уравнение (3) может быть проинтегрировано в квадратурах, но более простым является его численное интегрирование. В начале контактного участка
9 = 9 , , М = М , ^ - sin 9 AB . ( 9 , ) , Q y = Q y, ^ - sin 9 ,/ B ( 9 , ) . (4)
Угол 9, — одна из неизвестных величин рассматриваемой контактной задачи.
На свободном участке выполняется условие Qy = Qy 0 - w5 ( Qy 0 = const). Тогда из (2) получается система обыкновенных дифференциальных уравнений (ОДУ) для М , 9 , x , y ; ее общее решение содержит четыре произвольных константы. Граничные условия имеют вид: в заделке (при 5 = 0) — x = y = 0, 9 = 9 , ( 9 , — заданный угол закрепления); на конце свободного участка (при 5 = I ) — условия (4) и y = h . Итого, для отыскания семи неизвестных (среди которых Qy 0, l , 9,) задается семь граничных условий.
При введении новой координаты ^ = I - 1 5 е ( 0,1 ) и записи разрешающих уравнений и граничных условий с ее использованием задача может быть решена численно методом конечных разностей. Для этого стержень делится на N отрезков с равномерным шагом 5 = 1/N . Дифференциальные уравнения и граничные условия записываются в разностном виде; функциям М , 9 , x , y непрерывного аргумента £ ставятся в соответствие сеточные функции M i , 9 i , x, , y i ( i = 0,..., N ). По найденным приближенным значениям функций в узлах затем посредством интерполяции восстанавливаются сами функции [18–21].
Система ОДУ задачи представляется в операторном виде: dY/d £ = G ( £ , 1 , Y ) , где функция Y = ( М , 9 , x , y ) T . Для аппроксимации системы используется неявная симметричная одношаговая разностная схема, имеющая второй порядок точности [18, 20, 21]: ( У, + 1 - У, )/ 5 = ( G i + Gi + 1 )/2, ( i = 0,..., N - 1). В результате преобразований получается система 4 N разностных нелинейных алгебраических уравнений. Общее количество неизвестных задачи складывается из значений четырех искомых функций в узлах 4 ( N + 1 ) и трех дополнительных неизвестных Qy 0, 1 , 9 1 . Система уравнений дополняется разностными аналогами семи граничных условий: x 0 = y 0 = 0, 9 0 =9 , , yN = h , 9 N =9 1 , MN = М , , Qy 0 = Qy1 + w . Далее применяется итерационный метод Ньютона [18, 19, 21], начальным приближением служит решение линейной задачи для стержневой модели в классической постановке.
Изложенный алгоритм был реализован в пакете MATHEMATICA. Также задача решалась методом стрельбы в пакете MATHCAD (с использованием встроенных функций “sbval” и “rkfixed”). Результаты вычислений совпали.
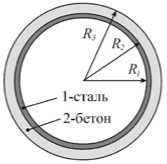
Расчеты проводились для трубопровода, сечение которого образуют два кольца, внутреннее стальное и внешнее бетонное, с радиусами R 1 = 0,565 м, R 2 = 0,6 м, R 3 = 0,7 м (Рис. 1, б) . Эти (и следующие) параметры соответствуют реальному трубопроводу компании Nord Stream [17]. Сталь имеет модуль упругости E 1 = 210 ГПа, коэффициент Пуассона V 1 = 0,28, объемную плотность р 1 = 7800 кг/м3. В данном расчете бетон считается физически линейным материалом со свойствами: E 2 = 27,5 ГПа, v 2 = 0,2, р 2 = 2450 кг/м3 [16]. Плотность морской воды составляет р H = 1028 кг/м3.
При определении жесткостей трубопровода как составного стержня считалось, что стальной и бетонный слои работают параллельно, и потому их жесткости складываются:
A-1 = £ EnIn, B- = £ EnSn, B2-1 = K £цnSn ,(5) n =1,2 n=1,2 n=1, где площади кольцевых поперечных сечений, их моменты инерции и модули сдвига вычисляются по формулам: Sn - n(Rt -Rn), In - n(R4+1 -R4)/4, Цn - En/[2 (1 + vn)]. Здесь n = 1, 2 (индекс 1 относится к стали, 2 — к бетону), K = 0,5 — коэффициент сдвига для тонкого кольца, который обуславливается геометрической формой сечения; значение коэффициента установлено в результате исследования краевых задач, проведенного в работе [12].
Расчет позволил оценить влияние растяжения и
Рис. 2. Распределение контактного давления ( Z = 5 - l )
сдвига. Сравнение полученных результатов с результатами по модели Кирхгофа показало, что роль
растяжения ничтожна и, следовательно, податливостью B1 можно пренебречь. Влияние сдвига невелико на свободном участке трубопровода: так координата точки контакта в модели Кирхгофа x(l) = 265,4 м, а в модели со сдвигом — 264,5 м; значения силы в сечении, отвечающие этим моделям, отличаются на доли процента. Но сдвиг заметно влияет на контактное давление (Рис. 2) — оно сводится к сосредоточенной силе при B2 ^ 0. Влияние сдвига на изгибающий момент показано на рисунке 3 для случая, когда глубина и угол закрепления составляют: h = 100 м, 9, = 30°. Как видно из графиков, расхождение моментов мало,
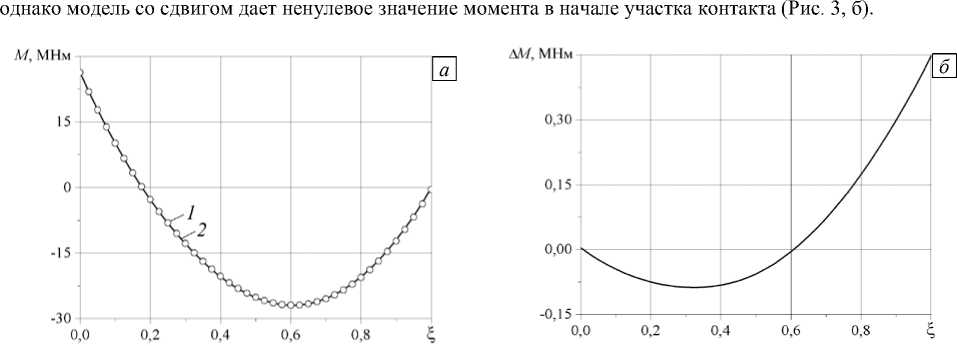
Рис. 3. Сравнение значений изгибающего момента, вычисленных по двум моделям ( а ): модель Кирхгофа (кривая 1 ) и модель со сдвигом ( 2 ); разность этих моментов ( б )
Далее решается задача с B = 0 (то есть задача для стержневой модели в классической постановке). С помощью этой, более простой, модели изучается влияние угла 9 , на НДС, при этом используется точное выражение гидростатической нагрузки.
3. Гидростатическая нагрузка
Рассмотрим провисающую часть трубопровода как трубку с осью L и сечением F (Рис. 4).
Радиус-вектор точек на оси r = r (5) — функция дуговой координаты. Орт j направлен по оси у вертикально вниз (как и выше). Давление в произвольной точке поверхности трубки, имеющей радиус-вектор R , равно p = p0 + yj ■ R, где p0 — давление при у = 0 (Рис. 1), у = рHg — удельный вес воды.
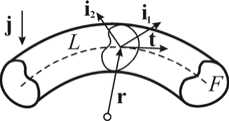
Рис. 4. Трубка в воде
На отрезок трубки 51 < 5 < 52 действуют гидростатические силы с главным вектором s2
- J p N dO = J q H d5 .
Os 1
Здесь O — боковая поверхность, N — орт внешней нормали к ней; выражение гидростатической нагрузки на единицу длины трубки q H предстоит вывести.
Вектор площадки N dO определим известными средствами дифференциальной геометрии.
В каждом сечении s = const введем декартовы оси x а с ортами i а . На контуре д F сечения имеем x а = x а ( ю ) — функции дуговой координаты. Поверхность трубки задается зависимостью радиус-вектора от двух координат R ( ю , s ) = r ( s ) + x , x = x „ ( ю ) i a ( s ) . По касательным к координатным линиям ( ю , s )
Д дR , / X . Д Д dR О направлены векторы производных Rю =— = x1юу ia = т, Rs = — = t + Q x x
Список литературы Нелинейно-упругая деформация подводного трубопровода в процессе укладки
- Kyriakides S., Corona E. Mechanics of offshore pipelines. Vol. 1: Buckling and collapse. -Slovenia, Elsevier, 2007. -400 p.
- Lenci S., Callegari M. Simple analytical models for the J-lay problem//Acta Mechanica. -2005. -V. 178, N. 1-2. -P. 23-39.
- Pedersen P.T. Equilibrium of offshore cables and pipelines during laying//Int. Shipbuilding Progress. -1975.-V. 22, N. 256. -P. 399-408.
- Raman-Nair W., Baddour R.E. Three-dimensional dynamics of a flexible marine riser undergoing large elastic deformations//Multibody System Dynamics. -2003. -V. 10, N. 4. -P. 393-423.
- Rienstra S.W. Analytical approximations for offshore pipelaying problems//Proc. of the First Int. Conf. on Industrial and Applied Mathematics. ICIAM 87. -Amsterdam, CWI Tracts, 1987. -P. 99-108.
- Stump D.M., van der Heijden G.H.M. Matched asymptotic expansions for bent and twisted rods: applications for cable and pipeline laying//J. Eng. Math., 2000. -V. 38, N. 1. -P. 13-31.
- Зиновьева Т.В. Анализ напряженно-деформированного состояния трубопровода при укладке на морское дно//Нефтегазовое дело. -2011. -№ 1. -С. 220-236. -URL: http://www.ogbus.ru/authors/Zinovieva/Zinovieva_1.pdf (дата обращения: 16.01.2012).
- Antman St. Nonlinear problems of elasticity. -Springer, 1995. -751 p.
- Попов Е.П. Теория и расчет гибких упругих стержней. -М.: Наука, 1986. -296 с.
- Елисеев В.В. Механика упругих тел. -СПб.: Изд-во СПбГПУ, 2003. -336 с.
- Елисеев В.В., Зиновьева Т.В. Механика тонкостенных конструкций. Теория стержней: Учеб. пособие. -СПб.: Изд-во СПбГПУ, 2008. -96 с.
- Елисеев В.В. Механика деформируемого твердого тела. -СПб.: Изд-во СПбГПУ, 2006. -231 с.
- Ветюков Ю.М., Елисеев В.В. Моделирование каркасов зданий как пространственных стержневых систем с геометрической и физической нелинейностью//Вычисл. мех. сплош. сред. -2010. -Т. 3, № 3. -С. 32-45.
- Моссаковский В.И., Гудрамович В.С., Макеев Е.М. Контактные задачи теории оболочек и стержней. -М.: Машиностроение, 1978. -247 с.
- Svetlitsky V.A. Dynamics of rods. -Springer, 2005. -448 p.
- Карпенко Н.И. Общие модели механики железобетона. -М.: Стройиздат, 1996. -416 с.
- Nord Stream: строительство. URL: http://www.nord-stream.com/ru/gazoprovod/cozdanie/(дата обращения: 11.03.2012).
- Бахвалов Н.С., Жидков Н.П., Кобельков Г.Г. Численные методы. -М.: Бином. Лаборатория знаний, 2003. -630 с.
- Каханер Д., Моулер К., Нэш С. Численные методы и программное обеспечение. -М.: Мир, 1998. -576 с.
- Кирьянов Д.В., Кирьянова Е.Н. Вычислительная физика. -М.: Полибук Мультимедиа, 2006. -352 с.
- Самарский А.А., Гулин А.В. Численные методы. -М.: Наука, 1989. -432 с.
- Качанов Л.М. Основы теории пластичности. -М: Наука, 1969.-421 с.
