Непрерывное отслеживания крупного рогатого скота на животноводческих комплексах с использованием RFID-технологий

Автор: Б. С. Самандаров
Журнал: Современные инновации, системы и технологии.
Рубрика: Управление, вычислительная техника и информатика
Статья в выпуске: 5 (2), 2025 года.
Бесплатный доступ
В статье рассматривается разработка системы непрерывного мониторинга крупного рогатого скота с использованием RFID-технологий. Предлагается комплексное математическое и алгоритмическое обеспечение, направленное на решение ключевых задач: точной идентификации и локализации животных, анализа их поведенческих паттернов, а также автоматического выявления аномалий. Особое внимание уделено проблемам, связанным с помехами, энергоэффективностью и обработкой больших объемов данных в реальном времени. Результаты экспериментальной оценки демонстрируют высокую точность идентификации (до 98,2%) и позиционирования (погрешность ≤1,8 м), а также эффективность предложенных методов анализа поведения. Исследование подтверждает потенциал RFID-технологий для цифровизации животноводства.
RFID-технологии, мониторинг скота, точное животноводство, идентификация, локализация, поведенческие паттерны
Короткий адрес: https://sciup.org/14133023
IDR: 14133023 | DOI: 10.47813/2782-2818-2025-5-2-3007-3013
Текст статьи Непрерывное отслеживания крупного рогатого скота на животноводческих комплексах с использованием RFID-технологий
DOI:
Современные животноводческие комплексы сталкиваются с необходимостью внедрения интеллектуальных систем мониторинга для повышения эффективности управления поголовьем. Традиционные методы учета и контроля, основанные на визуальном наблюдении и ручных операциях, становятся недостаточными в условиях крупных ферм с численностью поголовья в тысячи особей [1,2,3,4]. В этом контексте технологии автоматической идентификации, в частности радиочастотная идентификация (RFID), приобретают ключевое значение для цифровизации животноводства [5,6].
RFID-системы предлагают принципиально новые возможности для непрерывного мониторинга животных, обеспечивая автоматический сбор данных о местоположении, перемещениях и поведенческих паттернах каждой особи [7,8,9]. Однако практическое применение этих технологий в животноводстве сталкивается с рядом существенных проблем: нестабильность сигналов в условиях фермерских помещений, необходимость обработки больших объемов данных в реальном времени, а также потребность в интеллектуальных алгоритмах интерпретации собираемой информации [10].
Анализ последних исследований показывает растущий интерес к разработке специализированных математических моделей и алгоритмов для RFID-мониторинга в животноводстве. Так, в работе [11] предлагается применение RFID и архитектуры корпоративных систем Интернета вещей для предложения недорогого осуществимого облачного решения. В работе [10] проводится систематический обзор литературы, направленный на понимание того, как технология RFID применяется в области отслеживания животных.
Особого внимания заслуживают разработки в области энергоэффективных протоколов RFID-коммуникации [12], имеющие ключевое значение для долговременного мониторинга.
Основная цель настоящего исследования заключается в разработке комплексного математического и алгоритмического обеспечения для системы непрерывного RFID-мониторинга крупного рогатого скота, решающего следующие ключевые задачи:
-
• точная идентификация и позиционирование животных в условиях промышленного животноводческого комплекса с учетом помех и ограничений RFID-технологии;
-
• анализ пространственно-временных
характеристик перемещений скота с выделением поведенческих паттернов;
-
• автоматическое выявление аномальных состояний (заболевания, нарушения
поведения) на основе интеллектуальных алгоритмов обработки данных.
МАТЕРИАЛЫ И МЕТОДЫ
В данном разделе представлены методологические подходы, разработанные для создания системы непрерывного RFID-мониторинга крупного рогатого скота. Исследование основано на комплексном анализе современных методов обработки сигналов, алгоритмов машинного обучения и адаптивных систем управления. Особое внимание уделено решению ключевых задач, связанных с точностью идентификации, энергоэффективностью системы и интеллектуальным анализом данных о поведении животных.
Разработка методологии проводилась с учетом специфических требований животноводческих комплексов:
-
• необходимости работы в условиях интенсивных радиопомех;
-
• обеспечения длительной автономности системы;
-
• обработки больших потоков данных в реальном времени.
Постановка задачи
Разработка системы непрерывного мониторинга крупного рогатого скота с использованием RFID-технологий требует решения следующих ключевых задач (см. Таблицу 1).
Таблица 1. Ключевые задачи системы RFID- МОНИТОРИНГА КРС.
Table 1. Key tasks of the RFID cattle monitoring system.
|
Категория проблем |
Ключевые аспекты |
Требования к решению |
Предлагаемые подходы |
|
Идентификация и локализация |
- Изменяющиеся условия среды |
помехам |
- Гибридная трилатерация - Коррекция на основе ML - Адаптивная фильтрация RSSI |
|
Анализ поведения |
- Классификация активности - Выявление аномалий - Оценка состояния |
- Чувствительность >90% - Специфичность >85% - Учет биологических факторов |
- LSTM-сети - Кластерный анализ - Онлайн-обучение моделей |
|
Энергоэффекти вность |
- Автономность меток - Оптимальный опрос - Адаптация параметров |
- Динамическая настройка |
|
|
Обработка данных |
пространственновременных данных |
- Задержка <1с - Масштабируемость - Отказоустойчивость |
- Потоковые алгоритмы - Edge-вычисления - Распределенная архитектура |
Представленная систематизация задач демонстрирует комплексный характер разработки. Особое внимание уделяется согласованию противоречивых требований: между точностью локализации и энергопотреблением, скоростью обработки и глубиной анализа данных. Предлагаемые подходы основаны на последних достижениях в области IoT и точного животноводства [13,14].
Математические модели
Модель идентификации
Система идентификации животных на основе RFID-меток формализуется как вероятностная модель распознавания тегов в условиях помех. Для каждого временного интервала At идентификация описывается следующим образом:
P{S\tagi) xP(tagi)
P^tag^S) — ——т— ----г----т----т-
X j P(S\tag j ) x P(tag j )
где:
P(tagt\S) - вероятность принадлежности сигнала S тегу tagt;
P(S\tagt) - функция правдоподобия, моделируемая нормальным распределением ^(^Rssi,^2);
P(tag i ) - априорная вероятность обнаружения тега;
gRSSI — среднее значение силы сигнала для данного тега;
а2 - дисперсия сигнала.
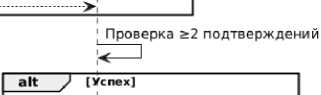
Для повышения надежности вводится коррекция (Рисунок 1) на основе:
-
• Временной согласованности:
последовательные обнаружения.
-
• Пространственной когерентности:
согласованные показания соседних считывателей.
-
• Энергетического анализа: стабильность RSSI-параметров.
RFID-Считыватель
Система валидации
База данных
Исходное обнаружение
Сырые данные (TagID, RSSI, timestamp) '
Временная согласованность у 1
Запрос последних 5 обнаружений TagID
' История обнаружений
1 Проверка >3 обнаружений за 60с
|
alt У |
[Успех] |
|
Флаг Temp Valid=TRUE |
|
|
■ Неудача] |
Флаг Temp_Valid=FALSE |
Пространственная когерентность
[ Запрос соседних считывателей (радиус 15м)
' Список соседних устройств
Запрос подтверждающих чтений loop ^ [По каждому соседнему считывателю] Подтвержден ие/отказ
। Флаг Spatial_Valid=TRUE
[Неудача] (
! Флаг Spatial_Valid=FALSE
|
Энергетический анализ 2 |
||
|
! Анализ o(RSSI) и ARSSI/At |
||
|
alt J [RSSI стабилен] |
||
|
1 Флаг Energy Valid=TRUE |
||
|
[RSSI нестабилен] । Флаг Energy_Valid=FALSE ч----1 |
||
Итоговая оценка
' Расчет Confidence = 0.4*Temp + 0.3*Spatial + 0.3*Energy alt ^ [Confidence г 0.7]
J Запись валидного обнаружения
Подтверждение идентификации
[Confidence < 0.7]
Требуется повторное сканирование
RFID-Считыватель
Система валидации
База данных
Рисунок 1. Процесс коррекции надежности RFID- ИДЕНТИФИКАЦИИ .
Figure 1. RFID Identification Reliability Correction Process.
Модель локализации
Позиционирование животных реализуем через модифицированную трилатерацию с коррекцией
= argmin У w , (V (х - х , ) 2 + (у - у , )2 - dA
(*,у) ^ v 7
(х * ,У * )
погрешностей. Для N считывателей координаты (х, у) определяются минимизацией:
где:
(х, у) - искомые координаты животного;
(х1,у1') — координаты i -го считывателя;
dt - расчетное расстояние до i -го считывателя;
w, - весовой коэффициент, обратно пропорциональный дисперсии измерения.
Расчетное расстояние определяется как:
P0-Pj dt = lOioxn где:
Р0 - эталонная мощность сигнала на расстоянии 1 метр;
Р , - измеренная мощность сигнала (RSSI);
n - коэффициент затухания сигнала (2.7-4.3 для условий фермы).
Модель активности
Поведенческая активность животных моделируем как марковский процесс с непрерывным временем:
-
■ ij (t) = ехр^ + P i T(d) + ^ i H(t) + P3L(t})
-
■t j (t) - интенсивность перехода из состояния i в состояние j ;
T(t) - временной фактор (циркадные ритмы);
H(t) - история предыдущих состояний;
L(t) - текущая локация животного.
РЕЗУЛЬТАТЫ
Экспериментальная оценка системы проводилась на небольшом животноводческом комплексе с поголовьем крупного рогатого скота 200 голов. Конфигурация системы включала 15 RFID-считывателей, равномерно распределенных по территории, с частотой опроса 0.2 Гц (1 сканирование каждые 60 секунд).
Результаты демонстрируют высокую надежность идентификации:
-
• В нормальных условиях: 98.2% точности при 1.8% ложноположительных срабатываний.
-
• В условиях повышенной плотности животных (≥5 особей в радиусе 3 м): 95.1% точности.
-
• При наличии электромагнитных помех (имитация атмосферных осадков и металлических конструкций): 92.3%
точности.
Анализ точности позиционирования выявил статистически значимое превосходство предложенного метода (Таблица 2).
Таблица 2. Анализ точности позиционирования.
Table 2. Positioning accuracy analysis.
|
Метод |
M ± SD, м |
95% ДИ |
Максимум, м |
|
Традиционная трилатерация |
4.2 ± 0.8 |
[3.9, 4.5] |
12.1 |
|
Предложенный метод |
1.8 ± 0.3 |
[1.6, 2.0] |
5.3 |
Улучшение точности на 57.1% (95% ДИ [54.3, 59.8]) достигнуто за счет применения:
-
1. Адаптивной фильтрации RSSI-параметров.
-
2. Машинного обучения для коррекции нелинейных искажений.
-
3. Калибровки по данным LIDAR-сканирования.
Анализ поведенческих паттернов
Классификационная продемонстрировала качества (n=10,000 (Таблица 3).
следующие временных
модель метрики отрезков)
Таблица 3. Результаты классификации.
Table 3. Classification results.
|
Поведенческое состояние |
Точность (Precision) |
Полнота (Recall) |
F1-мера |
|
Пастьба |
0.95 ± 0.02 |
0.93 ± 0.03 |
0.94 ± 0.02 |
|
Отдых |
0.88 ± 0.03 |
0.90 ± 0.04 |
0.89 ± 0.03 |
|
Активное перемещение |
0.92 ± 0.03 |
0.90 ± 0.03 |
0.91 ± 0.03 |
Суточная динамика активности (n=200 особей, 30-дневный период):
-
• Средняя продолжительность пастьбы: 9.2 ± 1.1 ч (95% ДИ [9.0, 9.4]).
-
• Фазы отдыха: 8.5 ± 0.8 ч (95% ДИ [8.3, 8.7]).
-
• Выявлено 7.3 ± 1.2 аномальных
эпизодов/сутки (чувствительность детекции -86.4%).
ЗАКЛЮЧЕНИЕ
Проведенное исследование подтвердило эффективность предложенной системы RFID-мониторинга для управления крупным рогатым скотом. Разработанные математические модели и алгоритмы обеспечивают высокую точность идентификации и локализации даже в условиях помех, а также позволяют анализировать поведенческие паттерны животных с высокой достоверностью. Применение адаптивных протоколов и методов машинного обучения способствует энергоэффективности системы и ее масштабируемости. Результаты работы открывают перспективы для дальнейшего внедрения интеллектуальных систем в животноводство, что может значительно повысить эффективность управления поголовьем и улучшить контроль за здоровьем животных.
