Numerical Implementation of Nonlinear Implicit Iterative Method for Solving Ill-posed Problems

Author: Jianjun Liu, Zhe Wang, Guoqiang He, Chuangang Kang
Journal: International Journal of Information Technology and Computer Science(IJITCS) @ijitcs
Article in issue: 4 Vol. 3, 2011.
Free access
Many nonlinear regularization methods may converge to local minima in numerical implementation for the complexity of nonlinear operator. Under some not very strict assumptions, we implement our proposed nonlinear implicit iterative method and have a global convergence results. Using the convexity property of the modified Tikhonov functional, it combines nonlinear implicit iterative method with a gradient method for solving ill-posed problems. Finally we present two numerical results for integral equation and parameter identification.
Nonlinear, gradient method, regularization, implicit iterative
Short address: https://sciup.org/15011629
IDR: 15011629
Text of the scientific article Numerical Implementation of Nonlinear Implicit Iterative Method for Solving Ill-posed Problems
Published Online August 2011 in MECS
This paper is dedicated to the computation of an approximation to a nonlinear operator equation
F(x) = y, (1)
where F:D(F) X ^ Y is a nonlinear operator between two real Hilbert spaces X and Y. If only noisy data yδ with
II y5-y II < 5 (2)
are available, then the problem of solving (1) has to be regularized. Nonlinear ill-posed problems are more different to solve than linear. Due to the importance for technical applications, many of the known linear regularization methods have been generalized to nonlinear equations[1,2].
In [3], we extend the implicit iterative method for linear ill-posed operator equations to solve nonlinear ill-posed problems, named nonlinear implicit iterative
Footnotes: 8-point Times New Roman font;
Manuscript received January 1, 2008; revised June 1, 2008; accepted July 1, 2008.
Copyright credit, project number, corresponding author, etc.
method. Under some conditions, the error sequence of solutions of the nonlinear implicit iterative method is monotonically decreasing. And with this monotonicity, we prove the convergence of our method for both the exact and perturbed equations. In this paper, we focus on the numerical implementation of nonlinear implicit iterative method. The main part in the numerical implementation is how to minimize the Tikhonov functional in each iteration. When regularization parameter is fixed, how to minimize the Tikhonov functional (3) is a well-posed optimization problem. In principle, all of nonlinear optimization methods can be implied to implement the nonlinear implicit iterative method. But, the convergence may not be hold since the local convergence of some methods and the non-strictly convex of the Tikhonov functional.
J a (x)= II y 5 - F(x) II 2 +a II x- x o II 2 (3)
In the numerical implementation of nonlinear implicit iterative method, we combine this method with the steepest descent method and develop an iterative algorithm for solving nonlinear ill-posed problems. It maintains the advantage of iteration methods in numerical realization and get a convergence result under some not very strict assumptions. In every iteration, we modify Tikhonov functional by idea of nonlinear implicit iterative method, replacing x+ with xδ n :
J a (x, x5)= II y 5 - F(x) II 2 + a II x- x II 2 (4)
The resulting method will be defined by x5,k+1 = x . + ek▽ Ja(x ., x ) (5)
Here, βk denotes a scaling parameter. Since it is based on the interaction of nonlinear implicit iterative method with the gradient method, we feel that 'Implicit Iterative-GRAdient method ' (IIGRA) is an appropriate name for the iteration.
The structure of the paper will be as follows. In section II, it will be shown that the modified Tikhonov functional (4) has a convexity property in the neighbourhood of a global minimizer of the functional. A convergence analysis for the steepest descent algorithm for minimizing (4) is given in section III. It is shown that the algorithm converges to a global minimizer of (4) if a starting value for the iteration within the abovementioned neighbourhood is known. Finally, in section IV, we will give two applications. Conclusion is in section V.
-
II. Results On The Convexity Property Of Modified Tikhonov Functional
Throughout this paper we have the following assumption:
Assumption 1 Suppose there is a ball B(x+, r) ⊂ D(F) with radius r around x+ and in the ball operator F satisfies:
-
(i) F is twice Fréchet differentiable with a continuous second derivative;
-
(ii) local Lipschitz condition: for x1, x2 ∈ B(x+, r) there holds
‖ F'(x 1 )- F'(x 2 ) ‖ ≤ L ‖ x 1 -x 2 ‖ ; (6)
-
(iii) ∃ some const η > 0, for all x 1 , x 2 ∈ B(x+, r) there holds
‖ F(x 1 )-F(x 2 )-F'(x 2 )(x 1 -x 2 ) ‖ ≤η ‖ x 1 -x 2 ‖‖ F(x 1 )-F(x 2 ) ‖ ;
As a deduction, we can conclude that F' is local bounded in B(x+, r) from assumption 1 (i), i.e.
M = sup{ ‖ F'(x)|x ∈ B(x+, r) ‖ } < ∞ (7)
Our aim is to use the steepest descent method for minimizing J α (x, x n δ ). It is well known that the steepest descent method will converge to (the global) minimizer of a functional, if it is convex. So we will prove that the modified Tikhonov functional has a convexity property in the neighbourhood of a global minimizer of the functional. Since limited by pages, we only give the convergence results without proof in the following, detail seen in [4].
From now on we will set
C x (t)(h, h):=∫1 0 (1-τ) F''(x + tτh)(h, h)dτ. (8)
By Taylor formula in integral form
F(x + th)=F(x) + tF'(x)h+∫1 0 (1-τ) F''(x + tτh)(h, h)dτ, we have
F(x+th)=F(x)+tF'(x)h+t2C x (t)(h,h). (9)
Let
φ α,h (t)= J α (x n δ +1 +th, x n δ ),t ∈ R, h ∈ X, ‖ h ‖ =1 , using (9) we get
J α (x+th, x n δ )=J α (x, x n δ )-2t( 〈 yδ-F(x),F'(x)h 〉 -α 〈 x-x n δ , 〉 ) +t2( ‖ F'(x)h ‖ 2-2 〈 yδ-F(x), C x (t)(h, h) 〉 +α ‖ h ‖ 2) +2t3 〈 F'(x)h, C x (t)(h, h) 〉 +t4 ‖ C x (t)(h, h) ‖ 2 (10)
Proposition 2 Let C x (t)(h, h) be defined as in (8), and define g(t):R + →Y by
g(t):= t2C x (t)(h,h) (11)
Then g(t) is twice differentiable and the following properties hold:
-
(i) g(t)= ∫t 0 (t-τ) F''(x + τh)(h, h)dτ.
-
(ii) g'(t)= ∫t 0 F''(x + τh)(h, h)dτ=t ∫1 0 F''(x + tτh)(h, h)dτ.
-
(iii) g''(t)= F''(x + τh)(h, h)
-
(iv) [ ‖ g(t) ‖ 2]''=2( 〈 g''(t), g(t) 〉 + ‖ g'(t) ‖ 2).
Proposition 3 Let C x (t)(h, h) be as in (8) and Ĉ x δ n+1(t)(h, h) be defined by
Ĉ x + δ 1n (t)(h, h):= ∫1 0 F''(x n δ +1 +tτh)(h, h)dτ, (12)
Then we obtain for the second derivative of φα,h(t) with ‖ h ‖ =1
φ' α ' ,h (t)=2 ‖ F'(x n δ +1 )h ‖ 2+2α+2 t2 ‖ Ĉ x n δ +1 (t)(h, h) ‖ 2
-
-2 〈 yδ- F(x n δ +1 ), F''(x n δ +1 +th) (h, h) 〉
+t 〈 F'(x n δ +1 )h,4 Ĉ x n δ +1 (t)(h, h)+2 F''(x n δ +1 +th) (h, h) 〉
+2t2〈F''(xnδ+1+th) (h, h), Ĉxnδ+1(t)(h, h)〉.(13)
To simplify the notation, we will define a(t,h):= 2 〈 F''(x n δ +1 +th)(h,h),Ĉ x δ n+1 (t)(h,h) 〉
+2‖Ĉx+δ1n(t)(h,h)‖2,(14)
b(t,h):= 〈 F'(x n δ +1 )h,4 Ĉ x + δ n1 (t)(h, h)
+ 2 F''(xnδ+1+th) (h, h)〉,(15)
c(t,h):=2α-2 〈 yδ-F(x n δ +1 ),F''(x n δ +1 +th)(h, h) 〉
+ 2‖F'(xnδ+1)h‖2(16)
and have therefore
φ'α',h(t) = c(t, h) + tb(t, h) + t2a(t, h)(17)
Proposition 4 Let a(t, h), b(t, h) and c(t, h) be defined as in (13)-(15). If 1-L ‖ yδ-F(xδ 0 ) ‖/ α > 0, then there must be some γ> 0 such that
γ + L‖yδ-F(xδ0)‖/α < 1(18)
holds. Then a(t, h), b(t, h) and c(t, h) can be estimated independently of t, h:
| a(t, h) | ≤ 3L2(19)
|b(t, h) | ≤ 6LM(20)
c(t, h) > 2γα,(21)
where L and M are defined as (6) and (7).
Proof. For a Lipschitz-continuous first Fréchet derivative with (6), the second derivative can be globally estimated using
‖ F''(x)(h, h) ‖ ≤ L ‖ h ‖ 2 (22)
According to the definition of Cx(t)(h, h) as in (8) and Ĉ x δ n+1(t)(h, h) as in (12) we have with ‖ h ‖ =1 ‖ C x δ n+1 (t)(h, h) ‖ ≤ ∫1 0 (1-τ) ‖ F''(x n δ +1 + tτh)(h, h) ‖ dτ≤ L 2 , ‖ Ĉ x n δ +1 (t)(h, h) ‖ ≤ ∫1 0 ‖ F''(x n δ +1 + tτh)(h, h) ‖ dτ ≤ L. and thus
| a(t, h) | ≤ 2 ‖ F''(x n δ +1 + th)(h, h) ‖‖ C x n δ +1 (t)(h, h) ‖
+ 2 ‖ Ĉ x + δ 1n (t)(h, h) ‖2 ≤ 3L2. (23)
Similarly
| b(t, h) | ≤ ‖ F'(x n δ +1 ) ‖ (4 ‖ Ĉ x n δ +1 (t)(h, h) ‖
+2 ‖ F''(x n δ +1 + th)(h, h) ‖)
≤ 6L ‖ F'(x + δ 1 n) ‖ ≤ 6LM. (24)
c(t,h) can be estimated as follows: c(t,h) - 2γα = 2 ‖ F'(x n δ +1 )h ‖ 2+2α
-
-2 〈 yδ- F(x n δ +1 ), F''(x n δ +1 +th) (h, h) 〉 -2γα
≥ 2α-2L ‖ yδ-F(x n δ +1 ) ‖ -2γα
≥ 2α-2L ‖ yδ-F(x 0 δ ) ‖ -2γα
= 2α(1-L‖yδ-F(xδ0)‖/α-γ) > 0.(25)
Theorem 5 Under assumption (18) and ‖ h ‖ =1, the functional φ α,h (t) is a convex function for all
-
1 2κα 2κα
|t| ≤ L(1+ 2) min{ 2 3 ,3M }:= r(α),(26)
where κ=1-L ‖ yδ-F(x 0 δ ) ‖/ α-γ. Particularly, it holds
φ'α',h(t) ≥ 2γα(27)
for |t| ≤ r(α).
Proof . We have
φ' α ' ,h (t)=c(t, h)+tb(t, h)+t2a(t, h)
We have to consider two cases:
-
(1) Let t>0. Then
φ' α ' ,h (t) ≥ c(t, h) - t| b(t, h) | - t2| a(t, h) | for b(t, h) ≤ 0 (28) φ' α ' ,h (t) ≥ c(t, h) - t2| a(t, h) | for b(t, h) > 0 (29)
-
(2) Let t≤0. Then we have
φ' α ' ,h (t) ≥ c(t, h) -t2| a(t, h) | for b(t, h) ≤ 0
φ' α ' ,h (t) ≥ c(t, h)-t| b(t, h) |-t2| a(t, h) | for b(t, h) > 0
Thus it is sufficient to consider the first case only. Setting k=1-L II y8-F(x0) II /a—Y, then κ>0 because of (18).
From (29) it follows, with (19) and (25), that φ' α ' ,h (t) - 2γα ≥ 2κα - 3L2t2 =: p 1 (t).
p1(t) has the zeros t1,2=
α
and because p1(0) > 0, it holds that φ'α',h(t)≥2γα for | t |≤| t1,2 |.
From (28) it follows, with (19) and (20) that Ф8,^ )- -2Ya > 2Ka-3LMt-3L 2 t2 =:p2(t).
and p 2 (t) has the zeros 1
t 1,2 = L

2κα M2+ 3 ].


Now let tmin=min{| t1 |,|t2 |}. Then 1 2 2κα tmin = L [-M M + 3 ]
= 2 κα
M M2+ 2 3 κα
2κα 3M
if 3 κα ≤ M
≥ l(1+ 2 )
3 κα
if 2 3 κα > M2
Combining (31), (33) we have shown that φ' α ' ,h (t) ≥ 2γα for
| t | ≤ L 1 min{
2κα
, 3m ( 1+ 2 )
}
1 2κα 2κα
=L(1+ 2) min{ 3 , 3M }. (34)
-
III. A Steepest Descent Method
The steepest descent method is a widely used iteration method for minimizing a functional. Although it is sometimes slow to converge, it seldom fails to converge to a minimum of the functional. The method is defined by x^,k+1= x . + P V Ja(x8n,k, xp) k=0,1,2,, where Vja(x8n,k, xn6) denotes the direction of steepest descent of Ja(x, xn6) at point x8n,k, and Pk e R+ is a step size or scaling parameter which has to be chosen according to
P k = arg min Щх8 пЛ +0 V Ja(x8n ,k , x 8 ), х П )}. (35)
p > 0
According to (10) we find
V ja(x8k, x^^FXx^n y8- F(x8 ,k ))-a(x8 ,k - x8)).
For the following, we might use the notation
K
r(a)
(
х
П+1
):={хe
X
|
x= x
n+i
+th, t
e
R, h
E
X,
II
th
I
(36) Define hk: = xn+1- xδn,k,(37)
and functions φ1, φ2 by
Ф1(t) = Ja(x8n,k+th, x8)(38)
Ф2(t) = Ja(x8n,k-th, x8)(39)
φ1 and φ2 can be rewritten as ф1(€)=ф1(0)+2 (V Ja(x8k, x8 ) ,|k t + ci(t, hk)t2
+ b1(t, hk)t3+a1(t, hk)t4(40)
ф
2
(t)=ф
2
(0)-2
+ b2(t, hk)t3+a2(t, hk)t4(41)
where the coefficients c1(t, hk), b1(t, hk), a1(t, hk), c2(t, hk), b 2 (t, h k ), a 2 (t, h k ) can be determined as in (10), eg.
c i (t,h k ) = I F’^) h k I 2 -2 ( y8-F(x n S k ), C x .‘k (t) h k , h k M , b i (t,h k )= 2 < F'(xnSk) h k , C x .‘k (t) h k , h k )
a i (t,h k ) = | C „; (t) h k , h k ) I2
Ф 1 ' (t) < 0 for t E [0,1], φ 1 '(t) = 0 for t = 1.
and
Ф 1 '' (t) > 2Ya | h k I 2, t E [0,1]. (41) Proposition 7 Assume that x 8,k E Kr ( a ) ( x 8+i ). Then an interval I=( 0, β 0 ],
_VJA_.^J,h k— 82.
P o I V ja(x8n ,k , x 8 ) 1 2 * ,Xn) 1 ).
exists such that the iterate x 8,k+i = x^—P k V ja(x5 „ t, x 8 ) is closer to х П+1 than x 8,k for P k e I:
II х П+1 - х Пл+1 II < II х П+1 - х П* II .
In particular, х Пл+1 e K r(a) ( х П+1 ).
Proposition 8 Let the assumptions of theorem 3 hold, and x n,j , j=0,…,k be the steepest descent iterates for minimizing Jα(x, x n ), and hk be defined as in (37) Moreover assume x n,j E Kr ( a ) ( х П+i ) j=0,.k. Then
<-Vja(x8nk, хП), hk> > Ya I hk II 2(43)
Define
4γα
X=4M2+4a+4L II ys-F(x0) II +4LM+L2 +L ).(44)
Proposition 9 Let the assumptions of theorem 5 hold, and x n,j , j=0,…,k be the steepest descent iterates for minimizing Ja(x, х П ). If x n,j e K r( a ) ( х П+i ), j=0,.k, and the scaling parameter βk is chosen such that
Pk< min{ I V ja(X nk , х П ) i 2 □ 6 n ) I 2) ,
Jα(xn,k, xn )-θmin k
A |V ja(x8 k , x n 6 ) | 2 nk
, x 8 ) I 2) }
holds, then the new iterate x n,k+1 is closer to x n+1 than x n,k
Here,
9 min,k =min{Ja(x 8,k -t V ja(x 8,k , x 8 ), x 8 ): t E R+}. (45)
In particular, x 8,k+i E K r( a ) (x 8+i ).
Proof. Let φ1(t), φ2(t) be defined as in (38)-(41). We will first estimate II hk II from below by Ф1(0)- Ф1(1). Keeping in mind that Ф1(1)= ф1(1-t) and Vja(x8+i, x8) = 0 hold, we get from (41)
φ 1 (0)- φ 1 (1) = φ 2 (1)- φ 2 (0)
= c 2 (t, h k )+ b 2 (t, h k )+ a 2 (t, h k ). (46)
On setting
C k,x δn+1 (t)( h k , h k )= ∫1 0 (1-τ) F''(xδ n+1 + tτh k )( h k , h k )dτ, (47) the coefficients in (46) can be determined from
C 2 (t,h k ) = H F'(x n 6 + 1) h k H 2 < ys-F(x n 6 +, ), C k, xn„ (t)( h k , h k ) > , b 2 (t,h k ) = 2 < F*(x^ 1 ) h k , C k, xn„ (t)( h k , h k ) )
a 2 (t,h k ) = H C k,xn„ (t)( h k , h k ) H2
Using
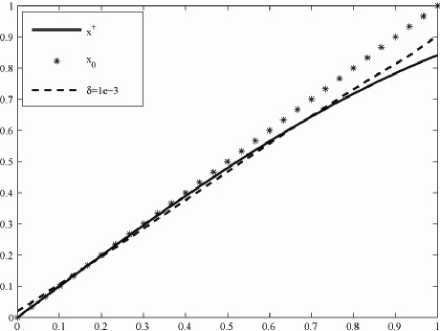
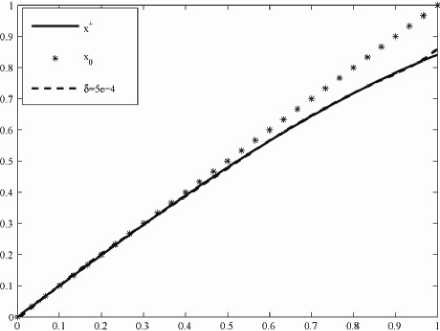
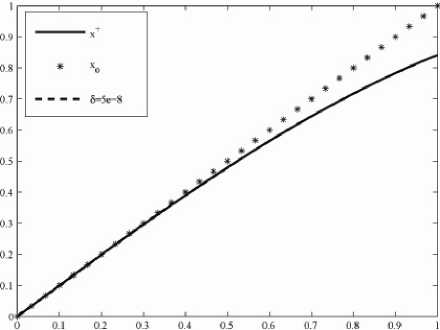
H C k,x)., (t)( hk, hk) H |c2(t,hk)| < (M2+a+L II y5-F(xoS) II ) HM2 =:^7 H hk H 2,(48) |b2(t,hk)| < LM H hk H HM3,(49) L2 |a2(t,hk)| < -y h. 4 : a2 H hk H 4.(50) Altogether this yields Ф1(0)- Ф1(1) < ~ HhkH2+X HhkH3+^r HMI4 The minimal value of Jo(xn+,, xn6)= ф1(1) is usually unknown, but θmin,k , defined in (45), can be computable. In the case of H hkH <1 we find φ1(0)- θmin,k ≤ φ1(0)- φ1(1) < (M2+a+L H ys-F(xoS) H ) H hk H2 + lm H hk H 3+L4 H hk H4 < (M2+a+L H ys-F(xoS) H + LM+L )HMI2- (51) Thus it follows by using () for H hkH <1 that <-VJa(x^k, Xn$, hk)) > Х(ф1(0)- 0mln,k) = /J.l„.(x .. X„S)- 0mm,k). In the case of HhkH>1 we get from () -Vji;(\ xn6, hk)) >Ya. Inserting the above estimates for <-Vj„(xn.., xn6, hk)) in (42) shows that вк<в0, and, by proposition , the new iterate is therefore closer to xδn+1 than the old one. Let κ1:=Lr(α)+M, rδ:= H ys-F(x06) Hα ,α)) , κ23:=α2(r2(α)+(rδ)2), K2:= H ys-F(x06) H 2+Mr(a)+Lr(a)2. Theorem 10 Let the assumptions of theorem 5 hold, Kr(a)(xs+1) be defined as in (36), xn6,0=xn6^ K.„. i\..i. and {x δn,k }k∈N be the iterates of steepest descent for the modified Tikhonov functional with вк chosen according to proposition 9. Then, there exists a constant K:=2κ21 +2Lκ2+2α+6κ1κ*+3L2κ3,(52) κ*:=2(κ1κ2+κ3),(53) such that the second derivative of 0k(t):= Ja(xSx-tVJa(xSx, xn6), xn6) tG[0,1](54) is bounded by 10''(t)| < K!|Vja(4 xn6) H 2. Proof. According to the choice вк all iterates are in Kr(a)(xs+1). The definition of Vja(xn_k, xn6) shows that H VJa(x,. xn6) H is bounded in Kr(a)(xs+1) by a constant κ* defined in (53), we have H VJa(xS,k, x ) < 2( H F'(xSx) H H ys- F'(xSx) H +a H xn,- xsn H ). and H F'(xSx) H < H F'(xSx)- F'(xS+1) H + H F'(xS+1) H < L H x+1n -xS,k H H ys- F'(xSx) H < H ys- F'(xS+1) H H F'(xS+1) - F'(xSx) H < H ys- F'(xs0) H + H F'(xn+1) H H xs+1 -xn, H +L H xs+1 -xs,k H2 < H ys- F'(xs0) H +M r(a)+ L r(a)2=K2,(56) a2Hxsn,k- xsn H2 < a2 (Hxsn,k- xsn+1 H2+ H xsn+1- xsn ≤ α 2 (r(α)2+( rδ)2) = κ23 .(57) Thus H VJa(xs,k, xn) H holds for all k. Defining C k,xn+1 (t)( hk, hk) as in (47) with hk replaced by -Vja(xsn,k, xn ) and setting C k,xn+, (t)( - V Ja(xs,k, xn ), - V Ja(xs,k, xn )) =j0F"(xs,k- tTVJa(xs,k, xn))( -VJa(xs,k, xn), -VJa^, xn ))dT we find θ'k'(t) = 2 H F'(xs,) VJa(xs„ xn) H -2 <ys- F(xn.k), F''(xs,k-t V Ja(xs,k, xn6))(- VJa(xs,k, xn ),- V Ja(x^, xn6)) ) +2a H VJa(xs,k, xn) H2 - 4t <F'(xs,k) VJa(xs,k, xn), "C k,x.-, (t)(- VJa(xs„ xn), - Vja(xsn,k, xn ))) - 2t <F'(xs,k) VJa(xs,k, xn), F"(xs,k-tVJa(xs„ xn)) • (- VJa(xs,k, xn6),- VJa(xs,k, xn6))) +2t2<F''(xs,k-tVJa(xs,k, xn6))(- VJa(xs,k, xn6),- VJa(xs,k, xn6)), C k,x.), (t) (- VJa(xs„ xn6),- VJa(xs„ xn6))) +2t2 H "C k,xL (t) (- VJa(xs,k, xn),- VJa(xs,k, xn)) H 2. The norm of Ck,xn„ (t) (- Vji;(x .. xn),- Vji;(x .. xn)) and C k,xn„ (t)( -VJa(xs,k, xn6), -VJa(xs,k, xn6)) can be estimated similarly C k,xδn+1 (t)( hk, hk): H C k,xn„ (t) (- VJa(xs,k, xn),- VJa(xs,k, xn)) H <2 H Vja(xs,k, xn6)H 2. HI C k,xn+, (t)( - V Ja(xs,k, xn ), - V Ja(xs,k, xn )) HI < L H VJa(xs„ xn) H 2. Using the above-given estimates, we can finally estimate 10k(t) | for t G[0,1] by 10k(t) | < (2k1 +2LK2+2a) HVja(xnk, xn) H2 + 6tK1L H Vja(x‘t, xn) H 3 + 3t2L2H VJa(xs„ xn) H 4 ≤ (2κ21 +2Lκ2+2α+6κ1κ*L+3L2(κ*)2) •HVja(xn„ xn) H2 = KHVja(xsn,k, xn )H2. (59) Now all ingredients for the final convergence proof of the steepest descent method have been collected: Theorem 11 Let the assumptions of theorem 5 hold, Кг(а)(хП+1) be defined as in (36), xn50=xn5 ^ K. ,ix.. ) and {x δn,k }k∈N be the iterates of steepest descent for the modified Tikhonov functional with вк chosen such that proposition 4 and вk where K is defined as in (52). Then { xδn,k }k∈N converges to a global minimizer of Ja(x, xn5): lim xnk= x arg min Ja(x, xn5) k→∞ x Proof. According to the choice вк and xn50e Kr(a>( xn+1), we have XnSkEKr(a)( xn+i) kEN. The sequence {xn5k } is monotonously decreasing and bounded from below, thus there exists J0, s.t J„(xn.„ x., )J for k^». First we will show that вк are bounded from below в, вк - в for all k. By the definition (33), we have Ok(t) - 0k(0) = -1 iVJa(x=k, xn5) I 2 + t- 0k( t ) 0< t According to theorem , |Ok(t)| Ok(t) - 0k(0) < -1 IIVJaKk, xn5) I 2 + 2 K|VJa(x^k, xn5) I 2 = (-t+2 K) U, X„S)|2. (61) If we set esp. t = K ≤ 1,then 0k(K ) - 0k(0) < - 2K IIVJaKk, xn5) I 2< 0. With the definition of θmin,k in (), we find 2K II VJa(x^,k, xn5) I 2<0k(0)-0k(K )<0k(0)- 0min,k 0k(0)- 0mm,k n,, I VJa(x^k, xn5) I 2 □Sn )I ) - 2K. 2) and from (58) follows I VJa(x=k, xn5) I □n ) I ) -"K* . Inserting (62), (63) in (60) yields вk-min{ "К* ,2^K ,]K ,1}=:в.(64) Next, we show V Ja(x n,k , x n5 ) ^0 for k^0 by contradiction. Let us suppose V Ja(xn_k, xn5) does not converge to zero. Then there exists ε0>0 s.t. for every N0∈N exists k > N0 with I VJaix .. xn5) I -Eg. (65) Because Ja(x5,k, xn5)= 0k(0) converge monotonously from above to J0,, we can moreover assume that |0k(0)- J0, |<4 £2 <4 £0 . holds for k large enough. Setting t=вk Ok(вk) - 0k(0) < вк (-1+^ )IVJa(xnk, xn5) I 2 < - I V.Ux .. xn5)I2< -в £0 or Ja(x=k+1, xn5) - J0. = Ok(вk) - J0. < 0k(0)- Ja"^ £2 pk 2 р^ 2 pk 2 ≤ 4 ε0 - 2 ε0 = - 4 ε0 < 0, which is a contradiction to V Ja(x 5Л, xn5)J,. As a consequence, VJ„(xn„, xn5) converges to zero. Now by the definition of hkin (37), we finally get by using (43) ya I hk I 2< (-VJa(x5,k, xn5), hk) < I VJa(x5,k, xn5) II hk I ^0, and x . >x .. for I hk I ^0. VI. The Iigra Algorithm Theorem 12 For the nonlinear implicit iterative method, so long as x05and a is chosen by (i) I xo5-x+I < (2T-L)a2-2Ta0-T 0) ; 2τ( +η+ )α20 ατ (ii) 1-L I y$-F(xg8) I > Y > 0; (iii) a - min{a0M2aJ|KL(1+^2 ) I y5-F(x0S) I , (3i^2)LM«y‘-F(xaI)fl; τ+ 3τ2-2τ (iv) α0 > 2τ-2 , then, the minima x δn+1 of every functional Jα(x, xn ), n=0,1,…can be given by steepest descent method. The steepest descent method is convergent as xn5 is chosen as iterative value for calculating x δn+1 . When stopping iterative number is determined by discrepancy principle, we have xδn(δ)→x+ δ→0. Proof. The condition (ii) assures theorem holds, the condition (i), (iii) and (iv) assure theorem holds and the condition (iii) assures rδ≤r(α). Therefore, we can always get xδn ∈Krδ( xδn+1)∈Kr(α)( xδn+1) with xδn+1 ∈Krδ( xδn ). The following conclusion can be gotten by theorem and induction. As mentioned earlier, the IIGRA algorithm is a combination of the steepest descent method for the minimization of the modified Tikhonov functional and an optimization routine for finding a regularization parameter α such that Morozov’s discrepancy principle[1] holds. The algorithm is defined as follows: Algorithm 13 IIGRA step(1) choose x05 and a satisfied theorem 7, give т > 1 and ε > 0, let n=0; step(2) let k=0, x8n,k = xns; Figure 1. The numerical effect figure with δ=1e-2. step(3) calculate VJa(x8+i,k, xns); step(4) if II VJa(x8+Lk, xns) || < e, goto step(6); step(5) choose вк by theorem 6 and calculate x n*+t = x n,k+ekVJa(x .. Xn‘), k=k+1, goto step(3); step(6) XnS+i= x ; step(7) if II y5-F(x8+i) II < t8, stop, otherwise let n=n+1 and goto step(2). V. Two Numerical Experiments Within this section we will give two practical relevant examples that meet the requirements of the IIGRA algorithm. Example 1: nonlinear Hammerstein integral equation F(x)s:=J0ф(x(s))ds=y5 D(F):=H1[0,1]→L2[0,1] Figure 2. The numerical effect figure with δ=1e-3. where assumption 1 are satisfied[2]. The first Fréchet derivate and transposition of operator F have the following form: (F'(x)h)(t) = ∫t0 φ' (x(s))h(s)ds, (F'(x)*h)(t) = B-1[φ'(x(s)) ∫s1h(t)dt. ] where (B-1z)(s) = ∫10k(s,t)z(t)dt. cosh(1-s)cosh(t) sinh(1) - k(s,t): = ' cosh(1-t)cosh(s) sinh(1) t > s Therefore, the iterative scheme of IIGRA is: Figure 3. The numerical effect figure with δ=5e-4. B-1[φ'(x(s)) ∫s1h(t)dt. ] = ∫10 k(s,t) φ'(x(t))[ ∫t1 yδ(ξ)dξ-∫t1 ∫ξ0 φ(x(η))dηdξ]dt. Set φ(x)=ex, then true solution x+=sin(t). We use IIGRA algorithm solve example 1 in different error level δ with iteration initial value x0(t)=t, τ=1.1, ε=1e-5, α=50. Table I shows the calculation results of example 1 where eo= II a » -a+ II l2, en= I a П -a+ II L2and n(8) is iteration numbers. We can see that absolute error en decreases with δ minishing. This is consistent of the conclusion in theorem 11. Fig.1-Fig.4 give the figures of x0, x+ and xns in different 8. TABLE I. THE NUMERICAL RESULTS OF EXAMPLE 1 IN DIFFERENT δ δ n(δ) e0 en en/ e0 1e-2 93 6.059e-2 1.808e-2 0.289 5e-3 118 6.059e-2 1.131e-2 0.187 1e-3 233 6.059e-2 3.720e-3 6.159e-2 5e-4 78 6.059e-2 3.281e-3 5.415e-2 1e-5 72 6.059e-2 2.001e-3 3.303e-2 5e-6 84 6.059e-2 9.804e-4 1.618e-2 1e-7 84 6.059e-2 1.205e-4 1.989e-3 5e-8 84 6.059e-2 5.356e-5 8.840e-4 Figure 4. The numerical effect figure with δ=5e-8. Example 2: parameter identification a(x) in BVP -(aux)x=-ex u(0)=1 u(1)=e where a(x)∈H1[0,1] and assumption 1 are satisfied[5]. Indeed, example 2 defines a nonlinear operator F: F(a)=u(a) D(F)={H1[0,1]| a ≥ a* > 0}. TABLE II. THE NUMERICAL RESULTS OF EXAMPLE 2 IN DIFFERENT aδ0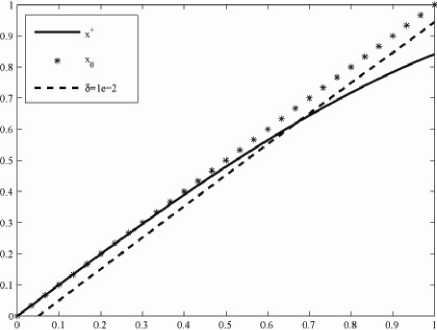
aδ0
n(δ)
e0
en
en/ e0
0.7
67
0.298
0.138
0.463
3
79
1.98
1.243
0.628
7
332
5.953
3.992
0.671
1+0.05sin(10πt)
44
3.532e-2
5.421e-3
0.153
1+0.1sin(10πt)
49
7.067e-2
8.564e-3
0.121
1+0.3sin(10πt)
58
0.212
8.772e-2
0.413
operator in numerical implementation. Results of examples show its convergence and effectivity. In the next work, we will focus on weakening the restrictions on the property of nonlinear operator.
References Numerical Implementation of Nonlinear Implicit Iterative Method for Solving Ill-posed Problems
- A. N. Tikhonov, A. S. Leonov and A. G. Yagola, Nonlinear Ill-posed Problems. Chapman and Hall: London, 1998.
- H. W. Engl, M. Hanke and A. Neubauer, Regularization of Inverse Problems. Kluwer: Dordrecht, 1996.
- L. Jianjun, H. Guoqiang and K.Chuangang, “Nonlinear Implicit Iterative Method for Solving Nonlinear Ill-posed Problems,”. Appl. Math. Mech. –Engl. Ed. Shanghai University Press. ShangHai, vol. 9, pp. 1183-1192, April 2009.
- L. Jianjun, Nonlinear implicit iterative method and regularization GMRES method for solving nonlinear ill-posed problems[D].(in Chinese) Shanghai University, 2008.
- M. Hanke, “A Regularizing Levenberg-Marquardt Scheme with Applications to Inverse Ground-water Filtration Problem,”. Inverse Problems. IOP Publlishing. Bristol, vol. 13, pp. 79-95, 1997
