Numerical Oscillations of Runge-Kutta Methods for Differential Equations with Piecewise Constant Arguments of Alternately Advanced and Retarded Type

Author: Qi Wang, FengLian Fu
Journal: International Journal of Intelligent Systems and Applications(IJISA) @ijisa
Article in issue: 4 vol.3, 2011.
Free access
The purpose of this paper is to study the numerical oscillations of Runge-Kutta methods for the solution of alternately advanced and retarded differential equations with piecewise constant arguments. The conditions of oscillations for the Runge-Kutta methods are obtained. It is proven that the Runge-Kutta methods preserve the oscillations of the analytic solution. In addition, the relationship between stability and oscillations are shown. Some numerical examples are given to confirm the theoretical results.
Runge-Kutta methods, numerical solution, piecewise constant arguments, oscillation
Short address: https://sciup.org/15010203
IDR: 15010203
Text of the scientific article Numerical Oscillations of Runge-Kutta Methods for Differential Equations with Piecewise Constant Arguments of Alternately Advanced and Retarded Type
Published Online June 2011 in MECS
The theory of the oscillation is one of the most interesting topics for applications. In recent years, the oscillations of difference equations [1,2], dynamic equations [3,4] and delay differential equations [5-8] have been studied and developed by many authors. Among these investigations, oscillations of solutions of differential equations with piecewise constant arguments (EPCA) have also been the subject of many recent investigations [9-12].
It is well known that studies of EPCA were motivated by the fact that they represent a hybrid of continuous and discrete dynamical systems and combine the properties of both the differential and difference equations. These equations play an important role in numerous applications [13,14]. And the theory of EPCA was developed intensively in the last few decades, such as [15-19]. For a brief summary of the theory, the reader is referred to the book by Wiener [20].
Recently, some important results on the properties of the numerical solutions of EPCA have been obtained, such as the stability [21-24] and the oscillations [25,26]. In [25,26], the authors considered the oscillations of numerical solutions in 9 -methods and Runge-Kutta methods for the same equation, respectively. Our paper contains an attempt to enrich the gap by considering oscillations of the Runge-Kutta methods for a more complicated equation and discussing the relationship between stability and oscillations.
In the present work, we shall consider the equation
x'(t) = ax(t) + bx([t + 0.5]), t > 0
-
< . (1)
_ x(0) = x0,
where a , b , x 0 are real constants and [.] denotes the greatest integer function. Since the argument deviation of (1) is positive in [ n , n + 0.5) and negative in [ n + 0.5, n + 1) , (1) is said to be of alternately advanced and retarded type. We aim to investigate the oscillations of the numerical solutions in the Runge-Kutta methods for (1) , and get some relationships between stability and oscillations.
The paper is organized in the following manner. In the next section, we give known definitions and results that will be needed further. Section 3 discusses the oscillations and non-oscillations of the numerical solution. We will prove that the oscillations of the analytic solution are preserved by the Runge-Kutta methods. In Section 4, we will obtain the relationship between stability and oscillations. Appropriate numerical examples are given to illustrate our results in Section 5.
-
II. P RELIMINARIES
In this section, we shall introduce some definitions and theorems.
Definition 1 [20] A solution of (1) on [0, да ) is a function x ( t ) satisfies the conditions:
-
• x ( t ) is continuous on [0, да) ;
-
• The derivative x '( t ) exists at each point t G [0, да ) , with the possible exception of the points t = n + 0.5, n = 0,1,2, L , where onesided derivatives exist,
-
• Eq. (1) is satisfied on [0,0.5) and each interval
[n - 0.5, n + 0.5) for n = 1,2,L .
The solution of (1) is given in the following theorem.
Theorem 1[20] If b *
a a/2 , e -1
then (1) has on [0, да) a unique solution x(t) = to(r(t))2[*+0.5]x0 , where
® ( t ) = e a + ( e a - 1 ) a 1 b ,
r ( t ) = t - [ t + 0.5],
. ^ (1/2)
^ •
^ ( - 1/2)
Definition 2 A non-trivial solution of (1) is said to be oscillatory if there exists a sequence {tk }^=1 such that tk ^ да as k ^ да and x(tk)x(tk-1) < 0; otherwise it is called non-oscillatory. We say (1) is oscillatory if all the non-trivial solutions of (1) are oscillatory; we say (1) is non-oscillatory if all the non-trivial solutions of (1) are non-oscillatory.
In [20,27], the authors establish the following oscillation results.
Theorem 2 If any of the conditions where x = ha and S(x) = 1 + xBT (I - xA )1 e is the stability function of the method. From [24], we know that the Runge-Kutta methods preserve the original order for (1).
We assume that S(x) * 0 and b *
a
.
S ( x ) m - 1
Then it follows from (3) that xz = Q(1)x0, 1 e M(0), x2km = Px2(k-1)m, k > 1 (4)
x 2 km + 1 = Q ( 1 ) x 2 km , 1 e M ( k ), (5)
where
Q ( 1 ) = S ( x ) 1 + b ( S ( x ) 1 -1 ) , - m < 1 < m ,
M ( k ) = { 0,1, L , m -1 } , for k = 0 ,
M ( k ) = { - m , - m + 1, L , m - 2, m -1 } , for k > 1 . and
Q ( m ) .
Q ( - m )
and
b >
a a/2
e - 1
b <
ae
a /2
a /2
e - 1
holds true, then (1) is oscillatory. Eq. (1) is non-oscillatory if and only if condition
ae
a /2
a /2
ea - 1
< b <
a a/2
ea - 1
is satisfied.
From Definition 2, we can see that if a solution x ( t ) of (1) is non-oscillatory and continuous, then it must be eventually positive or negative. That is, there exists a T e R such that x ( t ) > 0 or X ( t ) < 0 for t > T .
-
III. O SCILLATION ANALYSIS
-
A. Runge-Kutta methods
Similar to [24], let h — 1/ (2 m ), the v - stage Runge-Kutta methods ( A , B , C ) with
A = ( a ) , B = ( b 1 , b 2 , L , b v ) T and
X j / vxv
C = ( c 1 ,c 2 , L , c v ) T applied to (1) yield the recurrence relation
x.,^,ш = S ( x ) x., ^,+ — (S ( x ) - 1) x,, , (3)
2 km + 1 + 1 x / 2 km + 1 \ v л ) 2 km , x 7
a
B. Numerical oscillations and non-oscillations
For any given Runge-Kutta methods, we assume that 5 1 < 0 < 5 2 such that
0 < S ( x ) < 1, for 5 1 < x < 0, and
1 < S ( x ) < да, for 0 < x < 5 2 , which implies
0 < S C x )—1 < да, for 5 1 < x < 5 2 . x
For the sake of simplicity, we omit the definition of oscillations of (5) (see [26]). The following theorem gives the relationship of the non-oscillations between { x n } and
. 2 km
Theorem 3 { x n } and { x 2 km } are given by (5) and (4), respectively, then { xn } is non-oscillatory if and only if { x 2 km } is non-oscillatory.
Proof: The necessity is obvious. In the following, we prove the sufficiency. If { x 2 km } is non-oscillatory, without loss of generality, we assume that { x 2 km } is an eventually negative solution of (4), that is, there exists a kn e R such that xn, < 0 for k > kn . We will prove 0 2 km 0
x2km+1 < 0 for all k > k0 +1 and 1 e M(k). Suppose b < 0, if a < 0 , then 0 < S(x) < 1 and S(x)m < S (x)1, hence x 2 km+1 =f S ( x )1 + b ( S ( x )1 - 1)1x 2 km
I a у
-
<| S ( x ) m + b ( S ( x ) m —1 ) | I ax v
-
= x 2 km + m < 0’
If a > 0 , then 1 < S ( x ) < да and S ( x ) so
x 2 km
— I
m < S ( x ) — 1 ,
S ( x ) x 2 km + 1
x 2 km
x 2 km
= S ( x ) m x 2 km + m < 0.
Therefore x 2 km + l < 0 . The proof is complete.
By Theorem 3, we get the following corollary.
Corollary 1 { x n } and { x. respectively, then { x n } i { x 2 km } is oscillatory.
Set
:2 km } are given by (5) and (4), is oscillatory if and only if
a
A 1 = a /2
e
A 2 =
ae e a /2
a /2
— 1’
A; ( m ) =---- a ----,
S ( x ) m — 1
aS ( x ) m
-
A, ( m ) =--,
-
2 S ( x ) m — 1
then we have
Lemma 1
(i) A 1 1 ( m )
a > 0 or ex
and А 2
>A 2 ( m ) if e x > S ( x )
for
(ii) A , > A 1 ( m ) a > 0 or ex
< S ( x ) for a < 0;
or А 2 2( m ) if ex < S ( x ) > S ( x ) for a < 0;
for
(iii) A 1 ( m ) ^ A 1 as h ^ 0 and A 2 ( m ) ^ A 2
h ^ 0 .
Proof: (i) If a > 0 and ex > S ( x ) , then
as
e a /2
which is equivalent to
> S ( x ) m ,
e a /2
- <---------,
1 S ( x ) m — 1
so we have A 1 < A 1 ( m ) .
By (6), we also have
1 + -71— a/2
e — 1
< 1 +---- 1
S ( x ) m
— 1
that is
e a /2
a /2
e which is equivalent to aea/2
<
S ( x ) m
— 1 S ( x ) m
— 1’
e a /2
- >
aS ( x ) m
S ( x ) m — 1’
hence A 2 > A 2 ( m ) . With similar process, the other cases can be proved. This completes the proof.
Theorem 4 Eq. (4) is oscillatory if and only if b > A 1 ( m ) or b < A 2 ( m ) ; (4) is non-oscillatory if and only if A 2 ( m ) < b < A 1 ( m ) .
Proof: We can get this result from the fact that (4) is oscillatory if and only if the corresponding characteristic equation has no positive roots.
Definition 3 [26] We say the Runge-Kutta methods preserve the oscillations of (1) if (1) oscillates then there is a h 0 > 0 such that (5) oscillates for h < h 0 . Similarly, we say the Runge-Kutta methods preserve the nonoscillations of (1) if (1) non-oscillates then there is a h 0 > 0 such that (5) non-oscillates for h < h 0 .
Combining Theorems 2, 3, 4 and Corollary 1, we obtain
-
Theorem 5
-
(i) The Runge-Kutta methods preserve the oscillations of (1) if and only if A 1 > A 1 ( m ) or A 2 < A 2( m ) ;
-
(ii) The Runge-Kutta methods preserve the nonoscillations of (1) if and only if A 1 < A 1 ( m ) and A 2 > A 2( m ) .
Before giving the conditions that the Runge-Kutta methods preserve oscillations and non-oscillations of (1), we introduce the following corollary.
Corollary 2 [21,22] Suppose S ( z ) = ф( z )/ ^ ( z ) (where ф(z ), ^ ( z ) are polynomials) is the ( r , 5 ) -Pad e approximation to ez . Then
-
a) S ( x ) < ex if and only if 5 is even for all x > 0 ,
-
b) S ( x ) > ex if and only if 5 is odd for all 0 < x < ^ ,
-
c) S ( x ) > ex if and only if r is even for all x < 0 ,
-
d) S ( x ) < ex if and only if r is odd for all 7 7 < x < 0 ,
where ^ is a real zero of ys ( z ) and n is a real zero of Ф г ( z ) ’
Applying Theorem 5, Lemma 1 and Corollary 2, we can obtain the following theorems.
Theorem 6 Suppose S ( z ) is the ( r , 5 ) -Pad e approximation to ez , the Runge-Kutta methods preserve oscillations of (1) if any of the following conditions is satisfied:
-
(i) a > 0, h < h 1 and 5 is odd,
-
(ii) a < 0, h < h 2 and r is odd, where h 1 = — £ 1 / a , h 2 = — 5 2 1 a .
Theorem 7 Suppose S ( z ) is the ( r , 5 ) -Pad e approximation to ez , the Runge-Kutta methods preserve non-oscillations of (1) if any of the following conditions is satisfied:
(i) a > 0, h < h 1 and 5 is even,
(ii) a < 0, h < h 2 and r is even, where h 1 = — 5 1 / a , h 2 = —5 2 / a.
Tables 1-2 visually illustrate Theorems 6 and 7 respectively, where " — " denotes no limitation to parameters. And we give the conditions that the A -stable higher order Runge-Kutta methods preserve oscillations and non-oscillations of (1) (see Tables 3-4).
TABLE 1
PRESERVATION OF OSCILLATIONS
|
a |
h |
r |
s |
|
a > 0 |
h < h 1 |
odd |
|
|
a < 0 |
h < h 2 |
odd |
Let
TABLE 2
PRESERVATION OF NON-OSCILLATIONS
|
a |
h |
r |
s |
|
a > 0 |
h < h 1 |
even |
|
|
a < 0 |
h < h 2 |
even |
TABLE 3
PRESERVATION OF OSCILLATIONS FOR HIGHER ORDER
RUNGE-KUTTA METHODS
|
Gauss-Legendre |
Radau IA, IIA |
Lobatto IIIA, IIIB |
Lobatto IIIC |
|
|
( r , s ) |
( y , y ) |
( u — 1, u ) |
( u — 1, u — 1) |
( u — 2, u ) |
|
a > 0 |
u is odd |
u is odd |
u is even |
u is odd |
|
a < 0 |
u is odd |
u is even |
u is even |
u is odd |
TABLE 4
PRESERVATION OF NON-OSCILLATIONS FOR HIGHER ORDER
RUNGE-KUTTA METHODS
|
Gauss-Legendre |
Radau IA, IIA |
Lobatto IIIA, IIIB |
Lobatto IIIC |
|
|
( r , s ) |
( u , u ) |
( u — 1, u ) |
( u — 1, u — 1) |
( u — 2, u ) |
|
a > 0 |
u is even |
u is even |
u is odd |
u is even |
|
a < 0 |
u is even |
u is odd |
u is odd |
u is even |
IV. R ELATIONSHIP BETWEEN STABILITY AND OSCILLATIONS
Theorem 8 [20] The solution of (1) is asymptotically stable (the solution X ( t ) ^ 0 as t ^ да ) for any given x 0 , if and only if
a (ea +1) ,
--75----7 < b < — a, for a > 0,
(ea/2 — 1)2
, , a (ea +1)
b < — a or b > --75---- 7 , for a < 0, (7)
(ea/2 — 1)2
b < 0 , for a = 0.
Theorem 9 [24] The numerical solution of (1) is asymptotically stable ( X ( t ) ^ 0 as t ^ да ) if and only if
—
a (S (x )2 m +1) ,
------------7- < b < — a, for a > 0,
(S (x) m — 1)2
, , a (S (x )2 m +1)
b < — a or b > --—, for a < 0 , (8)
(S (x) m — 1)2
b < 0 , for a = 0.
A 3
a ( ea + 1 ) ,
and
A 3 ( m ) =
a (S (x )2 m +1) (S(x)m — 1)2 , by Theorems 2, 4, 8 and 9 we get the following theorems.
Theorem 10 For a > 0 , the analytic solution of (1) is
-
a) oscillatory and unstable if b £ ( —да , A 3 ) or b £ ( A 1 , +да ) ;
-
b) oscillatory and asymptotically stable if b £ ( A 3 , A 2) ;
-
c) non-oscillatory and asymptotically stable if b £ ( A 2, — a ) ;
-
d) non-oscillatory and unstable if b £ ( — a , A 1 ) .
for a < 0 , the analytic solution of (1) is
-
a) oscillatory and asymptotically stable if b £ ( —да , A 2) or b £ ( A 3 , +да ) ;
-
b) non-oscillatory and asymptotically stable if b £ ( A 2, — a ) ;
-
c) non-oscillatory and unstable if b £ ( — a , A 1 ) ;
-
d) oscillatory and unstable if b £ ( A 1 , A 3 ) .
Theorem 10 For a > 0 , the numerical solution of (1) is a) oscillatory and unstable if b £ ( —да , A 3 ( m )) or b £ ( A 1 ( m ), +да ) ;
-
b) oscillatory and asymptotically stable if b £ ( A 3 ( m ), A 2( m )) ;
-
c) non-oscillatory and asymptotically stable if b £ ( A 2( m ), — a ) ;
-
d) non-oscillatory and unstable if b £ ( — a , A 1 ( m )) .
for a < 0 , the numerical solution of Eq. (1) is
-
a) oscillatory and asymptotically stable if b £ ( —да , A 2 ( m )) or b £ ( A 3 ( m ), +да ) ;
-
b) non-oscillatory and asymptotically stable if b £ ( A 2( m ), — a ) ;
-
c) non-oscillatory and unstable if b £ ( — a , A 1 ( m )) ;
d) oscillatory and unstable if b £ ( A 1 ( m ), A 3 ( m )) .
V. N UMERICAL EXPERIMENTS
In order to give a numerical illustration to the main
theorems in the paper, we consider the following equations:
J x '( t ) = x ( t ) - 10 x ([ t + 0.5]), t > 0
| x (0) = 1,
J x '( t ) = - 2 x ( t ) - 5 x ([ t + 0.5]), t > 0
| x (0) = 1,
J x '( t ) = 3 x ( t ) - 2 x ([ t + 0.5]), t > 0
| x (0) = 1,
J x '( t ) = - x ( t ) - x ([ t + 0.5]), t > 0
| x (0) = 1,
four
0.5
-0.5
-1
-1.5
15 20
25 30
0.5
-0.5
-1
-1.5
15 20
25 30
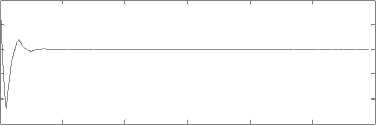
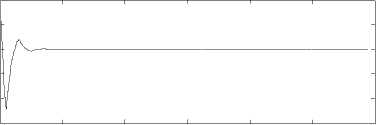
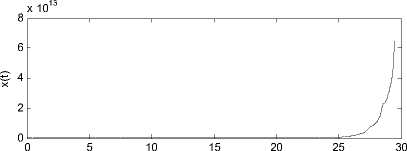
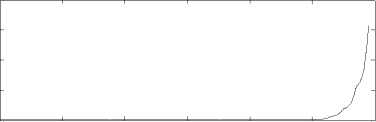
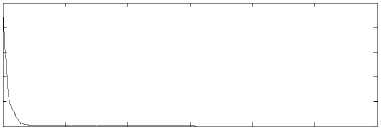
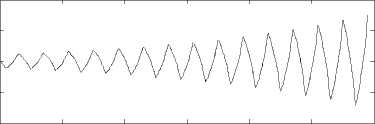
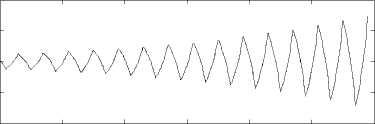
According to Theorem 2, the analytic solutions of (9) and (10) are oscillatory, the analytic solutions of (11) and (12) are non-oscillatory. In Figs. 1-4, we draw the figures of the analytic solutions and the numerical solutions using 1-Gauss-Legendre method, 2-Radau IA method and 2-Lobatto IIIC method. From these figures, we can see that the numerical solutions of (9) and (10) are oscillatory, the numerical solutions of (11) and (12) are non-oscillatory, which are in agreement with Theorems 6 and 7.
Figure 2. The analytic solution and the numerical solution for (10) by 2-Radau IA method with m=50
In Fig. 1, let m = 50, so A 1 B 1.5415, A 2 B - 2.5415, A 3 B - 8.8354, A 1 ( m ) B 1.5415, A 2( m ) B - 2.5415 and
x 1013
0 5 10 15 20 25 30
Figure 3. The analytic solution and the numerical solution for (11) by 2-
Lobatto IIIC method with m=50
A 3( m ) B - 8.8353, Obviously, b = - 10 £ ( -^ , A 3 ) and b = - 10 £ ( -^ , A 3 ( m )). Therefore, the analytic solutions and the numerical solutions of (9) are both oscillatory and unstable according to Theorems 10 and 11, which are in agreement with Fig. 1. For (10)-(12), we can verify the consistency in the same way (see Figs. 2-4).
All these numerical examples confirm our theoretical findings.
0.8
0.2
0.6
0.4
-20
-40
0 5 10 15 20 25 30
0.8
0.6
0.4
0.2

5 10 15 20 25 30
Figure 4. The analytic solution and the numerical solution for (12) by 2-Lobatto IIIC method with m=50
-20
-40
0 5 10 15 20 25 30
Figure 1. The analytic solution and the numerical solution for (9) by
1-Gauss-Legendre method with m=50
VI. CONCLUSION S
In this paper, numerical oscillations of Runge-Kutta methods for one important class of EPCA of alternately advanced and retarded type are discussed. The preservation of oscillations of the Runge-Kutta method
are obtained and the relationships between the stability and the oscillations are considered for the analytic solution and the numerical solution, respectively. Four numerical examples have shown the correctness of the main result. We will consider the Euler-Maruyama method in the future work.
A CKNOWLEDGMENT
The authors wish to thank Professor Mingzhu Liu for his helpful comments and constructive suggestions. This work was supported by the National Natural Science Foundation of China (No. 51008084), the Natural Science Foundation of Guangdong Province (No. 9451009001002753) and the Youth Foundation of Guangdong University of Technology (No. 092027).
References Numerical Oscillations of Runge-Kutta Methods for Differential Equations with Piecewise Constant Arguments of Alternately Advanced and Retarded Type
- H. Khatibzadeh, “An oscillation criterion for a delay difference equation,” Comput. Math. Appl., vol. 57, pp. 37–41, 2009.
- Q.L. Li, Z.G. Zhang, F. Guo, Z.Y. Liu, and H.Y. Liang, “Oscillatory criteria for Third-Order difference equation with impulses,” J. Comput. Appl. Math., vol. 225, pp. 80–86, 2009.
- B.G. Jia, L. Erbe, and A. Peterson, “New comparison and oscillation theorems for second-order half-linear dynamic equations on time scales,” Comput. Math. Appl. vol.56, pp. 2744-2756, 2008.
- B.G. Jia, L. Erbe, and A. Peterson, “Oscillation of sublinear Emden-Fowler dynamic equations on time scales,” J. Difference Equations Appl. vol. l6, pp. 217-226, 2010.
- J.R. Graef, J.H. Shen, and I.P. Stavroulakis, “Oscillation of impulsive neutral delay differential equations,” J. Math. Anal. Appl. vol. 268, pp. 310-333, 2002.
- I. Kubiaczyk, S.H. Saker, “Oscillation and stability in nonlinear delay differential equations of population dynamics,” Math. Comput. Model., vol. 35, pp. 295-301, 2002.
- L.P. Gimenes, M. Federson, “Oscillation by impulses for a second-order delay differential equation, ” Comput. Math. Appl., vol. 52, pp. 819-828, 2006.
- A.Z. Weng, J.T. Sun, “Oscillation of second order delay differential equations,” Appl. Math. Comput., vol. 198, pp. 930-935, 2008.
- J.H. Shen, I.P. Stavroulakis, “Oscillatory and nonoscillatory delay equations with piecewise constant argument,” J. Math. Anal. Appl., vol. 248, pp. 385-401, 2000.
- Z.G. Luo, J.H. Shen, “New results on oscillation for delay differential equations with piecewise constant argument,” Comput. Math. Appl., vol. 45, pp. 1841-1848, 2003.
- Y.B. Wang, J.R. Yan, “Oscillation of a differential equation with fractional delay and piecewise constant arguments,” Comput. Math. Appl., vol. 52, pp. 1099-1106, 2006.
- X.L. Fu, X.D. Li, “Oscillation of higher order impulsive differential equations of mixed type with constant argument at fixed time,” Math. Comput. Model., vol. 48, pp. 776-786, 2008.
- S. Busenberg, K. Cooke, Vertically Transmitted Diseases, Models and Dynamics, in: Biomathematics, Berlin: Springer, 1993.
- T. Kupper, R. Yuang, “On quasi-periodic solutions of differential equations with piecewise constant argument,” J. Math. Anal. Appl., vol. 267, pp. 173-193, 2002.
- G. Papaschinopoulos, “Linearization near the integral manifold for a system of differential equations with piecewise constant argument,” J. Math. Anal. Appl., vol. 215, pp. 317-333, 1997.
- A. Alonso, J.L. Hong, “Ergodic type solutions of differential equations with piecewise constant arguments,” Int. J. Math. Math. Sci., vol. 28, pp. 609-619, 2001.
- Y. Muroya, “Persistence, contractivity and global stability in logistic equations with piecewise constant delays,” J. Math. Anal. Appl., vol. 270, pp. 602-635, 2002.
- R. Yuan, “On the spectrum of almost periodic solution of second order scalar functional differential equations with piecewise constant argument,” J. Math. Anal. Appl., vol. 303, pp. 103-118, 2005.
- F. Gurcan, F. Bozkurt, “Global stability in a population model with piecewise constant arguments,” J. Math. Anal. Appl., vol. 360, pp. 334-342, 2009.
- J. Wiener, Generalized Solutions of Functional Differential Equations. Singapore: World Scientific, 1993.
- M.Z. Liu, M.H. Song, and Z.W. Yang, “Stability of Runge-Kutta methods in the numerical solution of equation ,” J. Comput. Appl. Math., vol. 166, pp. 361-370, 2004.
- Z.W. Yang, M.Z. Liu, and M.H. Song, “Stability of Runge-Kutta methods in the numerical solution of equation ,” Appl. Math. Comput., vol. 162, pp. 37-50, 2005.
- M.Z. Liu, S.F. Ma, and Z.W. Yang, “Stability analysis of Runge-Kutta methods for unbounded retarded differential equations with piecewise continuous arguments,” Appl. Math. Comput., vol. 191, pp. 57-66, 2007.
- W.J. Lv, Z.W. Yang, and M.Z. Liu, “Stability of Runge-Kutta methods for the alternately advanced and retarded differential equations with piecewise continuous arguments,” Comput. Math. Appl., vol. 54, pp. 326-335, 2007.
- M.Z. Liu, J.F. Gao, and Z.W. Yang, “Oscillation analysis of numerical solution in the -methods for equation ,” Appl. Math. Comput., vol. 186, pp. 566-578, 2007.
- M.Z. Liu, J.F. Gao, and Z.W. Yang, “Preservation of oscillations of the Runge-Kutta method for equation ,” Comput. Math. Appl., vol. 58, pp. 1113-1125, 2009.
- A.R. Aftabizadeh, J. Wiener, “Oscillatory and periodic solutions of an equation alternately of retarded and advanced type,” Appl. Anal., vol. 23, pp. 219-231, 1986.
