О динамической модели кисти человека

Автор: Драгулеску Д., Унгуреану Л., Менихардт K., Станциу A.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 (35) т.11, 2007 года.
Бесплатный доступ
Разработка искусственных систем, имитирующих движение человеческого тела, ставит ряд актуальных проблем, относящихся к их способности перемещать предметы. Решение этих проблем еще далеко до завершения, несмотря на то, что они были обстоятельно исследованы и к настоящему моменту уже получены положительные результаты. Существует огромное количество модификаций протезов кисти, многие из них используются на практике, имеются в продаже, но пока ни один протез не может в точности выполнять движения человеческой руки. Необходимо изучить поведение кисти и построить такую кинематическую модель, которая обеспечила бы простоту и надежность эксплуатации протеза, имела небольшой вес и привлекательный внешний вид. Моделирование динамического поведения кисти человека обусловлено тем, что физиологические движения кисти в норме предполагают динамику. Кисть человека имеет много степеней свободы, поэтому полученная при моделировании система дифференциальных уравнений предполагает численное решение. Такие модели являются основой для разработки протеза, удовлетворяющего всем требованиям. В работе представлена динамическая модель кисти человека и конструкция протеза на гидравлической основе, которая, по мнению авторов, является более простой, надежной и недорогой по сравнению с аналогами.
Модель кисти человека, динамика кисти человека, протез кисти человека
Короткий адрес: https://sciup.org/146215883
IDR: 146215883 | УДК: 531/534:
Текст научной статьи О динамической модели кисти человека
Для каждого человека потеря верхней конечности влечёт за собой серьезные последствия, проявляющиеся в неспособности выполнять ежедневные действия и в неэстетическом внешнем виде. Разработка искусственных систем, имитирующих движение кисти человека, ставит множество проблем, относящихся к их способности перемещать предметы. В результате научных исследований были разработаны и
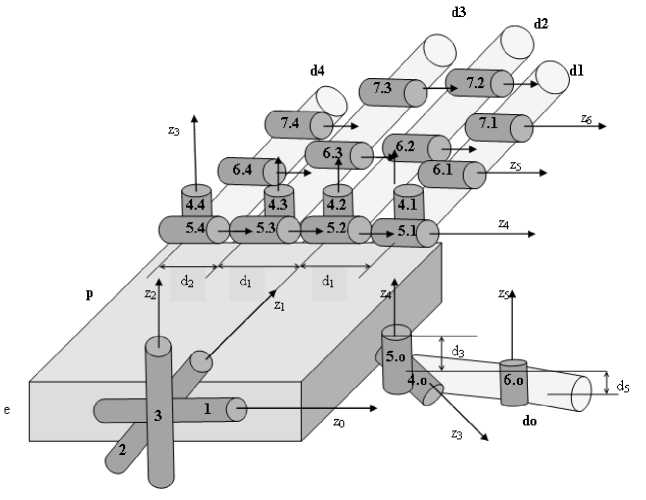
Рис.1. Модель кисти человека созданы различные модификации протезов кисти человека. Многие из них имеются в продаже и отмечены устойчивым потребительским спросом, однако для большинства пациентов они не доступны по цене, сложны в эксплуатации и управлении. Анализируя достижения в этой области, можно заметить, что разработчики стремятся добиться не только увеличения количества движений, выполняемых протезом, но также сделать его механизм более простым, практичным и удобным в использовании. LMS Mechanical Hand of Laboratorie de Mechanique des Solides from Poitiers University (Университет Пуатье) [5], DIST Hand, DIST-Universita di Genova (Генуя) [1], Robonaut Hand, NASA (НАСА) [8], DLR Hand, German Aerospace Centre (Немецкий Аэрокосмический центр) [2], Barrett Hand, Barrett Technology Incorporated Inc. [9], Shadows Dexterous Hand, Shadow Robot Company [10], Ultralight Hand, Karlsruhe University (Университет Карлсруэ) [6], Utah/MIT Hand, Cente of Engineering Design from University of Utah (Университет штата Юта, США) и Artificial Intelligence Laboratory of MIT (Массачусетский Технологический Институт) [4] - вот некоторые модели. Несмотря на то, что эти модели многофункциональны (способны захватывать различные предметы и двигать пальцами с высокой скоростью), часть из них не соответствует структуре кисти человека (меньше степеней свободы, фаланг или пальцев), и ни одна из них не может выполнять такое же количество движений, сколько выполняет эта часть человеческого тела.
Чтобы протез как можно больше соответствовал анатомической форме человеческой кисти, был функционален [3], надежен и комфортен в использовании, необходимо досконально изучить натуральную модель, ведь по статистике от 50 до 70% пациентов носят устройства, заменяющие им кисть [7]. В работе представлена динамическая модель кисти человека и предложена конструкция протеза на гидравлической основе. Среди существующих протезов кисти на гидравлической основе самый удачный (с точки зрения авторов) - это Ultralight Hand , изготовленный в Университете Карлсруэ ( Karlsruhe University ). Этот протез приводится в действие с помощью специальных гидроприводов, находящихся в суставах. В модели авторов используется другой тип гидравлического привода для гибкости пальцев с целью обеспечения линейной связи между вариацией силы, создаваемой пальцами, и
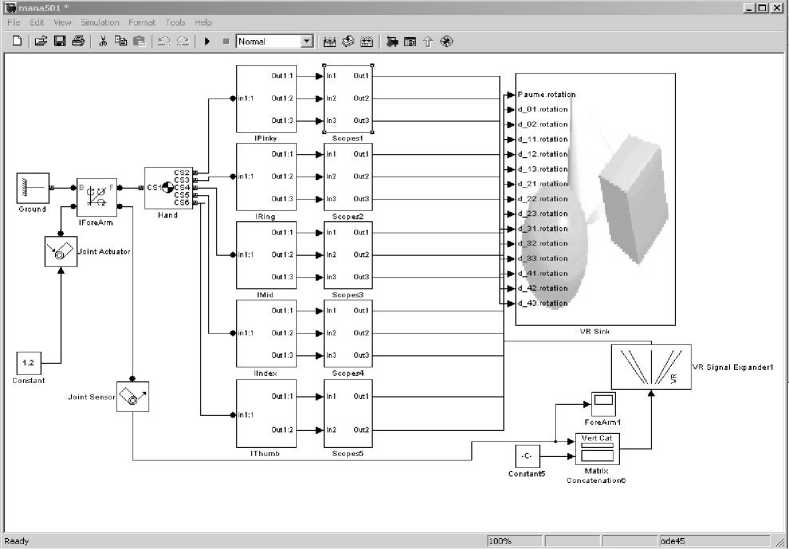
Рис. 2. Модель кисти в SimMechanics действующей силой (выраженной в давлении гидравлической жидкости). Двигатели и насосы расположены на предплечье, что очень важно для облегчения веса протеза (несмотря на то, что у протезов, имеющихся в продаже, приблизительно одинаковый вес с кистью пациента, они кажутся более тяжелыми [6]). Для растягивания протеза используются отталкивающие пружины.
Динамическая модель
Для производства протеза кисти человека и апробации на людях была построена модель со следующими допущениями: ладонь – это параллелепипед, а все фаланги – цилиндры. В модели 22 степени свободы, которые отражают обобщенные координаты qi ( i = 1, 2, … 22) суставов, которые участвуют в движениях кисти человека (рис. 1).
Для определения законов движения в каждом суставе были составлены уравнения Лагранжа второго рода, впоследствии решенные в программе Mathlab . Но в этих уравнениях кинетическая энергия имеет очень сложный вид из-за большого числа степеней свободы. Следовательно, возникает необходимость решать в Mathlab 44 дифференциальных уравнения, решениями которых являются обобщенные координаты суставов и скорости (22 уравнения для q i и 22 уравнения для q i ). Эту модель можно упростить, сократив число независимых переменных (предполагая, что только 9 из них являются независимыми). Размеры и массы сегментов модели были выбраны близкими к значениям кисти человека. Решения, полученные в Mathlab , представленные в виде законов движения и кривых скоростей, являются функциями от времени.
Чтобы проверить, влияют ли упрощения на соответствие между кистью и моделью, последняя была построена повторно в программе VrlBuild 2 с 22 степенями свободы, а движения были смоделированы в SimMechanics (рис. 2).
На основе результатов двух описанных моделей был проведен статистический
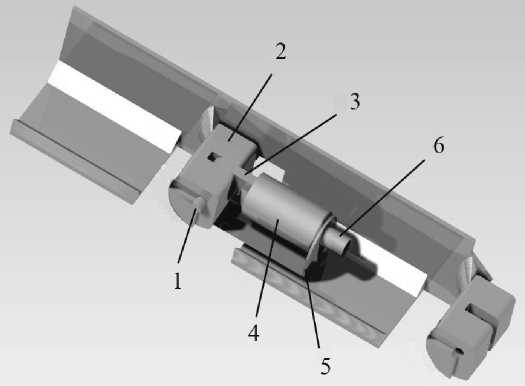
Рис.3. Рабочий механизм
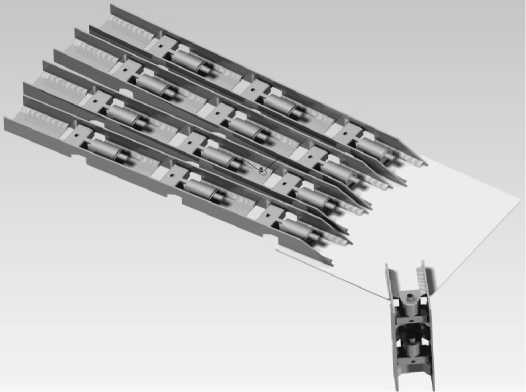
Рис.4. Трехмерный вид модели анализ, который показал, что значительной разницы между моделями не было. Поэтому динамическая модель кисти человека была взята за основу для разработки функционального протеза.
Предложенная модель конструкции
Технически очень трудно создать протез, который способен выполнять все функции кисти человека, поэтому авторы решили акцентировать свое внимание на самой главной функции, подразумевающей восприятие. Изучая кисть человека, можно заметить, что, когда она хватает предмет, пальцы смыкаются, пытаясь принять контуры объекта. В то же время человек воспринимает тактильное ощущение вместо определения положения фаланг в каждый момент времени. Предложенная модель работает таким же способом. Датчик гидравлического давления крепится к гидравлической цепи с Т-образным отводом. Когда протезу нужно захватить предмет, управление по цепи дает команду насосу увеличить давление. Каждая фаланга начинает смыкаться вокруг предмета, и движение остановится в тот момент, когда предельное давление будет достигнуто. Предельное давление должно быть экспериментально определено для каждого предмета, который протезу нужно будет захватить.
Чтобы обеспечить линейную связь между вариацией силы, создаваемой пальцами, и действующей силой (выраженной в гидравлическом давлении жидкости), авторы разработали приводную систему (рис. 3). Когда гидравлическая жидкость будет втекать в привод (4) через сопло (6), возрастающее давление будет пытаться вытеснить шатун (3). Так как шатун прикреплен к шарниру (1) между фалангами посредством подшипника скольжения, то только внешний цилиндр привода может двигаться в противоположном направлении в канале внутри фаланги. Цилиндрический сектор (2), вокруг которого намотана стальная лента (5), прикреплен к дистальному концу фаланги. Стальная лента крепится другим концом к соплу, поэтому движение внутреннего цилиндра будет определять вращение вокруг цилиндрического сектора, обеспечивая гибкость фаланги, к которой он прикреплён. Так как стальная лента не может давить, то для растягивания фаланги необходимы отталкивающие пружины. Общий вид модели показан на рис. 4.
Результаты и выводы
Модель, предложенная в этой статье, является одной из простых, надежных и недорогих по сравнению с аналогами. Конструкция состоит из твердой части, выполненной из титана, и гидравлической жидкости с высокой точкой кипения, что позволяет отказаться от использования температурных датчиков. Протез состоит из насосов, гидравлических датчиков, двигателей и цепи управления, расположенной на предплечье, что делает протез более легким по сравнению с Ultralight Hand , с приводом в трансфалангеальной области. Также протез, следуя рабочему принципу, может захватывать большое количество предметов без датчиков положения. Несмотря на то, что авторы озабочены ограниченностью применения этой модели, они надеются в дальнейшем усовершенствовать её, чтобы модель могла успешно использоваться в каждодневной деятельности пациентами с одной здоровой рукой.
