О дискретных моделях колебательных систем

Автор: Зайцев В.В., Карлов А.В., Шилин А.Н., Федюнин Э.Ю.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 1 т.18, 2015 года.
Бесплатный доступ
Предложен алгоритм численного интегрирования задачи Коши для уравнений движения нелинейных колебательных систем. Продемонстрирована трансформация конечно-разностных вычислительных алгоритмов в объекты нелинейной динамики в дискретном времени.
Колебательная система, конечно-разностный алгоритм, дискретное время, нелинейная динамика
Короткий адрес: https://sciup.org/140255896
IDR: 140255896
About discrete models of oscillatory systems
The algorithm of numerical integration of a task of Cauchy for the equations of the movement of nonlinear oscillatory systems is offered. Transformation of finite difference computing algorithms in objects of nonlinear dynamics in discrete time is shown.
Текст научной статьи О дискретных моделях колебательных систем
Самым распространенным подходом к численному моделированию динамических систем является переход к дискретному времени путем конечно-разностной аппроксимации дифференциальных или интегральных операторов в их уравнениях движения [1]. При этом происходит замена исходной системы (НВ-системы), функционирующей в непрерывном времени, динамической системой с дискретным временем (ДВ-системой). Все дальнейшие результаты – это результаты анализа характеристик ДВ-системы. Хорошо, если они с определенной точностью воспроизводят характеристики НВ-системы. Но так как законы НВ-динамики и ДВ-динамики, строго говоря, различны, это далеко не всегда имеет место. Например, ДВ-система не может одновременно иметь частотную и импульсную характеристики аналогового прототипа – хорошо известный факт из области цифровой обработки сигналов [2].
Различия в свойствах НВ- и ДВ-систем, как правило, становятся пренебрежимо малы, если выбрать шаг дискретизации по времени (интервал дискретизации) много меньшим, чем характерный временной масштаб системы. Но уменьшение шага, естественно, приводит к увеличению времени вычислений и может сделать численный эксперимент неприемлемо продолжительным. Поэтому практическое значение имеют интервалы дискретизации, составляющие существенные доли временных масштабов. В этой ситуации результаты исследований упомянутых различий НВ- и ДВ-систем могут быть полезны при выборе метода моделирования динамической системы.
В настоящей работе для численного моделирования нелинейных колебательных систем (КС) предлагается использовать алгоритм, основанный на сохранении импульсного отклика линейного осциллятора. Частотная характеристика эквивалентной алгоритму ДВ-системы сравнивается с частотными характеристиками ДВ-систем, соответствующих явным методам Рунге – Кутта.
1. Импульсно-инвариантный метод моделирования
В качестве базовой дифференциальной модели нелинейной КС рассмотрим уравнение d2 u to0 du 2 2
+ + to o u -to o f ( u , t ) , (1)
dt2 Q dt где too и Q — собственная частота и добротность системы; f(u, t) – функция, описывающая реактивную нелинейность и содержащая аддитивное внешнее воздействие на КС. В дальнейшем будем использовать также ее запись с выделенным воздействием: f (u, t) - g (u(t)) + e(t). В качестве физического объекта, моделируемого уравнением движения (1), можно предложить, например, колебательный контур с нелинейной емкостью, возбуждаемый источником напряжения. В этом случае осциллирующая переменная u(t) – напряжение на емкости контура.
Альтернативной (1) формой описания КС является ее интегральная модель в виде уравнения Вольтера второго рода [3]
t
u ( t ) = J f ( u (t), t ) h ( t - t) d т + U ( t ). (2)
Здесь функция времени U ( t ) описывает свободные колебания в контуре.
Ядро уравнения (2) h(t - т) — импульсная характеристика контура, удовлетворяющая уравнению d2h ®0 dh 2K 2$M
+ + m o h = m o 5 ( t ) (3)
dt2 Q dt с дельта-функцией в правой части и нулевыми начальными условиями. Отметим, что свободные колебания U(t) также подчиняются уравнению (3), но зависят от начальных условий. Решением (3) при t > 0 является функция m2 Г m ^
h ( t ) = — exp I 0- t I sin(^ 1 t ) .
Ю 1 v 2 Q J
Частота осцилляций к> 1 в высокодобротном контуре с точностью до величин второго порядка малости по параметру ц = 1/ Q совпадает с ю ° :
to 1 = ю ° 1
- 4 Q 2 = “ ° + O (ц 2 ) '
Потому в дальнейшем, считая эти частоты одинаковыми, будем использовать импульсную характеристику
h ( t ) = m ° exp
- 2 Q t J sin( m o t ).
Легко установить, что отсчеты характеристики (4) на равномерной временной сетке t n = n A t при n > 2 удовлетворяют разностному уравнению
D 2 { h ( t n ) } ^ h ( t n ) - 2а cos ( m ° A t ) h ( t n - 1 ) + + 0 2 h ( t n - 2 ) = °, где
„ Г ®0 □ а = exp - °- At ,
V 2 Q J и начальным условиям
h ( t ° ) = h (0) = 0, h ( t 1 ) = h (A t ) = аю ° sin(m ° A t ).
Последовательность отсчетов применим h(tn) при дискретизации времени в интегральном уравнении (2). Для этого создадим дискретизирующую последовательность to hd(t) = At ^ h(tm)5(t - tm). (6)
m = 0
Импульсную характеристику h(t - т) в (2) заменим последовательностью (6). После интегриро- вания для значений решения на временной сетке tn получим уравнение дискретной свертки u (tn) =
= A t ^^f ( u ( t n - t m ), t n - t m ) h ( t m ) + U ( t n ).
m = 0
Это уравнение имеет вторую форму n
u ( t n ) = a t ^ f ( u ( t k ), t k ) h ( t n - t k ) + U(t n ). (7)
k = 0
Теперь обе части уравнения (7) подвергнем воздействию разностного оператора D 2 ( 0 } (см. (5)). При n > 2 это приводит к следующему результату:
D 2 { u ( t n ) } = A th (A t ) f ( u ( t n - A t ), t n - A t ) . (8)
Отметим, что в процессе преобразования правой части (8) использованы равенство h (0) = 0, уравнение (5) и аналогичное ему уравнение D 2 { U ( t n ) } = 0.
Следует обратить внимание на то, что равенство h (0) = 0 приводит к зависимости правой части (8) от момента времени tn - A t = tn - 1 . А это, в свою очередь, позволяет получить явную разностную схему.
Таким образом, алгоритм моделирования нелинейных колебаний определяется рекуррентной формулой un - 2а cos (m°At) un-1 + а2un-2 = = A th (At) f (un-1, tn-1),
где n = 3, 4, ..., а для значения u1 и u2 с помощью выражений u1 = ^ A th (At) f (u °, t ° ) + U
1 ,
u 2 = A th (2A t ) f ( u ° , t ° ) + U 2
в соответствии с интегральным уравнением (2) определяются по начальным условиям u ° , i t ° .
2. Трансформация вычислительного алгоритма в ДВ-систему
Теперь, считая (10) уравнением движения, представим конечно-разностный алгоритм в форме ДВ-системы. Для удобства представления выделим в правой части (10) аддитивное воздействие: f ( u , t ) = g ( u ( t ) ) + e ( t ). Чтобы подчеркнуть смысл индекса n как дискретного времени, введем новое обозначение: u [ n ] = un . Кроме того, все частоты будем измерять в единицах частоты дискретизации ю d = 2п / A t , так что m ° A t = 2nQ ° . Это весьма удобный способ измерения частот.
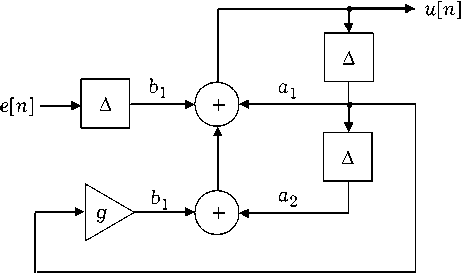
Рис. 1. Блок-схема нелинейной ДВ-системы (11)
Например, значение Q o = 0.167 соответствует шести отсчетам на период.
Таким образом, ДВ-система, соответствующая разностному алгоритму (10), определяет-
ся уравнением движения
u [ n ] = а .1 u [ n - 1] + a 2 u [ n - 2] +
+ b1g (u[n - 1]) + be[n - 1], где a1 = 2acos (2nQ), a2 =-a2, b1 = 2naQ0 sin(2nQo), a = exp (-nQ / Q).
В динамике систем с дискретным временем ДВ-система (11) становится самостоятельным объектом исследований.
Структура связей в ДВ-системе (11) наглядно отображается блок-схемой, приведенной на рис. 1. С ее помощью нетрудно установить, что выходной сигнал u [ n ] формируется суммарным воздействием на линейный ДВ-контур внешнего сигнала e [ n - 1] и внутреннего сигнала обратной связи g ( u [ n - 1] ) . При этом форма частотной характеристики линейного ДВ-контура играет важнейшую роль в формировании u [ n ]. Частотные характеристики НВ- и ДВ-контуров в (1) и (11) описываются точными формулами:
H a ( j Q )
H d ( j Q )
= 7-----^------ и
(q2 -qO ) + jQQ0 / Q b1 Z :(jQ)
1 - a 1 Z - 1 ( j Q) - a 2 Z "" 2 ( j Q)’
где Z ( j Q) = exp( j 2nQ).
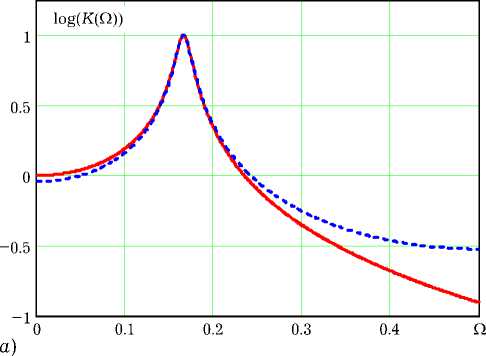
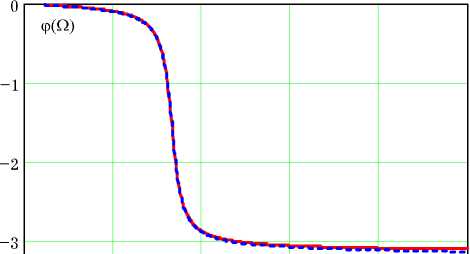
На рис. 2, а показаны графики амплитудно-частотных характеристик Ka (Q) =| Ha (jQ) | (сплошная линия) и Kd (Q) =| Hd (jQ) | (пунктирная линия) контуров с собственной частотой Qo = 0.167 и добротностью Q = 10. Фазочастотные характеристики (рис. 2, б) при этом с графической точностью совпадают. Из этих и аналогич- ных им графиков следует, что ДВ-система (11)
% 0.1 0.2 0.3 0.4 n 6)
Рис. 2. АЧХ и ФЧХ НВ- и ДВ-контуров хорошо воспроизводит частотные свойства аналогового колебательного контура в области резонанса, а наибольшие различия в свойствах наблюдаются в области высоких частот. Если в нелинейной системе сигнал обратной связи g (u[n - 1]) кроме колебаний основной частоты содержит их гармоники, то следует ожидать, что значения u(tn), полученные с помощью численного алгоритма (10), будут отличаться от истинных завышенным уровнем гармоник.
3. Дискретные отображения осцилляторов методами Рунге – Кутта
Представляет интерес сопоставление частотных характеристик (12) с характеристиками ДВ-осцилляторов, порождаемых в результате применения к линейному НВ-осциллятору явных методов Рунге – Кутта [4] – традиционных методов численного моделирования динамических систем. Для обозначения таких ДВ-систем можно использовать также термин «дискретные отображения».
Семейство явных алгоритмов Рунге – Кутта порядка p = 1 ^ 4 ( RK 1 ^ RK 4) можно определить общими формулами [4]
p
У n + 1 = y n + A t ^ b s k s , s = 1
k 1 = f ( У n , t n ) , k 2 = f ( У n + a 21 k 1 A t , t n + c 2 A t ) , (13) k 3 = f ( У n + ( a 31 k 1 + a 32 k 2 ) A t , t n + c 3 A t ) , k 4 = f ( y n + ( a 41 k 1 + a 42 k 2 + a 43 k 3 ) A t, t n + c 4 A t ) , где числовые значения коэффициентов a , b и c для каждого из порядков р рассчитываются методом подгонки рядов Тейлора [4].
Для линеаризованного осциллятора (1) вектор-функция f ( y , t ) правых частей уравнений состояния системы имеет следующий вид:
T
. (14)
– для RK 3:
|
A 11 = 1 — 2n 2 Q ° 2; A 12 = 2nQ ° |
4П Q ° 3 Q 3 , 1 2 ° 2 4n 3 Q 3 f |
1 — Q 2 |
|
|
Q — |
3 t |
||
|
A = 1 — 2^° ° |
— 2n 2 Q 2 f |
1 — Q^ Q J |
| + |
|
22 Q 8n 3 Q 3 f, 1 +------ ° | 1-- |
° t . J, |
||
,
2 Q
® 0 У 2 ,
—
® 0 y
Q 2
—
® 0 У 1 + ® o e ( t )
B ( Z ) = 2n 2 Q 2 Z 1/3--0 ,
10 3 Q
Как и ранее, чтобы подчеркнуть смысл индекса n как дискретного времени в ДВ-системе (13)—(14), вводим новое обозначение y [ n ] = y n и измеряем частоты в единицах частоты дискретизации: to ° A t = 2nQ ° . Колебания y [ n ], возбуждаемые гармоническим воздействием e [ n ] = EZn ( j Q), представим в виде
y [ n ] = Y Zn ( j Q), (15)
где Y = ( Y 1 , Y 2 ) T — вектор-столбец комплексных амплитуд Y 1 и Y 2 , зависящих от частоты Q. Тогда частотная характеристика ДВ-осциллятора (13)–(14) определяется отношением
H ( j Q) = Yj ). (16)
E
После подстановки (15) в (13)–(14) и проведения преобразований получим систему линейных алгебраических уравнений для комплексных амплитуд
B 2 ( Z )
nQ °
3nQ o Z 2/3 — 2n 2 Q 2 Z 1/3 +
2 Q
4n 3 Q 0 <1
3 I
– для RK 4:
A 11
= 1 — 2n 2 Q °
—
Q 2
;
4n 3 Q 3 2n 4 Q 4 L
+---0 + —ЛI 1
3 Q 3 Q 2
—
2n 2 Q 2
A 12 = 2 nQ o —--
Q
4n 3 Q 3 C 1 ) 4n 4 ° 4 C 1 )
--1--~ +--1--~ .
3 t Q 2 J 3 Q ( 2 Q 2 J
Q 2
2nQn 991 11
A 22 = 1-- 0 — 2n 2 Q 2 1 — — +
22 Q 0 I Q 2 J
8n 3 Q 3 L 1 1 2n 4 Q 4 L 3 1 1
+ 0 111+ 0 11+I,
3 Q ( 2 Q 2 J 3 ( Q 2 Q 4 J
ZY 1 = An Y 1 + A 12 Y 2 + B 1 ( Z ) E , ZY 2 = A 21 Y 1 + A 22 Y 2 + B 2 ( Z ) E .
B 1 ( Z ) =
< 4n 2 Q 2
—
2n 3 Q 0 1 3 Q
Z 1/2
+
Здесь элементы матрицы À и функции Bi ( Z ) зависят от собственной частоты to o и добротности Q НВ-осциллятора (1). Для алгоритмов второ-
2л 2 0 2_ _ 2n 3 Q 0 _ 2n 4 Q g_ < 1 _ 1 I
+ 3 3 Q 3 Q 2 t Q 2 J ’
го, третьего и четвертого порядков получе-
ны следующие формулы расчета элементов Aij ( A 21 = — A 12 ) и функций B i ( Z ):
– для RK 2:
B 2 ( z ) = ^0 ° Z +
+
< 4nQ0
4n 2 0 2
3 Q
2n 3 Q 0
|
A 11 |
= 1 |
— 2n 2 Q ° , |
A 12 = 2nQ0 — |
2n 2 Q ° Q |
|
A 22 |
= 1 |
2nQ0 Q |
2п 2 0 2 I 1 — 1 t Q 2 J |
, |
,
+ nQ ° — 2n 2 Q ° — 2n 3 Q 0 <1 — Д_
+1- 3 Q 3 t Q 2
4n 4 0 4 f, 1 1
+--------- ° I 1-- 3“ I.
3 Q t 2 Q 2 J
B 1 ( Z ) = 2n 2 Q ° ,
B 2( Z ) = nQ0 Z + nQ0 I 1
2nQ0 ).
Q 2 J’
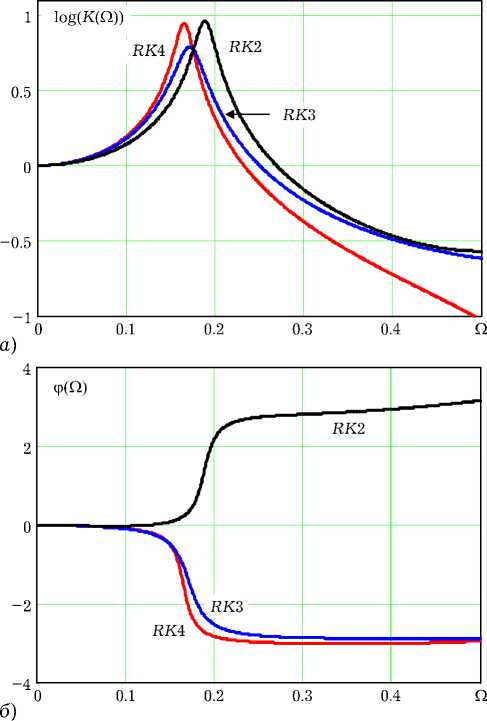
На рис. 3 представлены результаты расчетов амплитудно-частотных (рис. 3, а ) и фазочастотных (рис. 3, б ) характеристик ДВ-осциллято-
e[n] —► T
Рис. 3. АЧХ и ФЧХ ДВ-осцилляторов с алгоритмами Рунге – Кутта
Х2И
У1И

Х1И
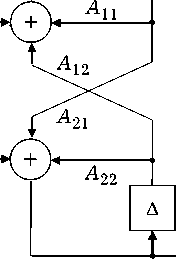
Рис. 4. Блок-схема ДВ-системы (18)
У2И
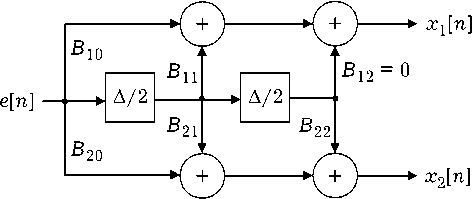
Рис. 5. Блок-схема трансверсальной части ДВ-системы (18)
функций Bi ( Z ). Например, для алгоритма RK 4 она описывается уравнениями:
Х1[n] = Еюe[n] + Bne[n - 1/2], x2[n] = B20e[n] + B21e[n - 1/ 2] + B22e[n - 11>
ров (13)—(14) с параметрами Q0 = 0.167, Q = 10. Расчеты проведены на основе решений СЛАУ (17) с учетом определения (16). Как и следовало ожидать, алгоритм RK4 наиболее точно воспро- изводит частотную характеристику линейного резонатора. А вид фазочастотной характеристи- ки RK2 свидетельствует о неустойчивости чис- ленного
метода при
выбранной величине шага
to0A t = 2nQ0 = 1.047.
Переход в СЛАУ (17) к дискретному временному аргументу позволяет получить общий вид разностных уравнений движения ДВ-осциллятора:
У 1 [ n ] = A 11 У 1 [ n - 1] + A 12 У 2 [ n - 1] + X 1 [ n ],
У 2 [ n ] = A 21 У 1 Е n - 1] + A 22 У 2 [ n - 1] + X 2 [n ],
где входные воздействия x 1[ n ] и x 2 [ n ] на рекурсивную часть системы формируются трансверсальной подсистемой с повышенной частотой дискретизации. Блок-схема рекурсивной ДВ-системы (18) показана на рис. 4.
Структуру трансверсальной подсистемы нетрудно установить на основе выражений для где полуцелые значения дискретного времени означают, что выборка входного сигнала производится с удвоенной частотой дискретизации. Блок-схема подсистемы (19) изображена на рис. 5.
Отметим, что представления в форме ДВ-систем полезны при исследовании устойчивости численных алгоритмов. Так, основываясь на блок-схемах рис. 4 и рис. 5, можно утверждать, что устойчивость методов Рунге – Кутта при моделировании диссипативных осцилляторов определяется устойчивостью рекурсивной системы (18). А она устойчива при условии, что корни полинома
P ( z ) = 1 - ( A 11 + A 22 + A 12 A 21 ) z 1 + A 11 A 22 z 2 на комплексной плоскости z находятся в круге единичного радиуса и с центром в начале координат. Но, так как коэффициенты Aij являются функциями частоты Q 0 = K^A t /2п и добротности Q , условие нахождения в единичном круге связывает максимальный шаг интегрирования A t с параметрами осциллятора ® 0 и Q .
Заключение
При анализе погрешностей численных экспериментов по исследованию временных и частотных характеристик нелинейных резонансных систем полезно использовать представления численных алгоритмов в форме динамических систем с дискретным временем. На их основе показано, что импульсно-инвариантный метод (10) за счет однократного, а не четырехкратного вычисления нелинейных функций в уравнениях движения колебательных систем имеет большую вычислительную эффективность, чем близкий ему по точности метод Рунге – Кутта четвертого порядка. Но вычисления по RK4 позволяют более точно определять гармонический состав нелинейных колебаний. Однако наличие в схеме RK4 удвоенной частоты дискретизации затрудняет использование алгоритма в устройствах цифровой обработки сигналов.
Список литературы О дискретных моделях колебательных систем
- Самарский А.А., Михайлов А.П. Математическое моделирование. М.: Физматлит, 2002. 320 с.
- Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с.
- Зайцев В.В., Зайцев О.В., Никулин В.В. Интегральные модели автоколебательных систем // Физика волновых процессов и радиотехнические системы. 2006. Т. 9. № 1. С. 53-57.
- Хайер Э., Нёрсетт С., Ваннер Г. Решение обыкновенных дифференциальных уравнений. Нежесткие задачи. М.: Мир, 1990. 512 с.
