О генераторах динамического хаоса на основе модифицированной модели Лоренца

Автор: Зайцев В.В., Карлов аР.В., Нураев Д.Б.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 2 т.19, 2016 года.
Бесплатный доступ
Представлена математическая модель автоколебательной системы - модифицированного генератора Лоренца, полученной путем преобразования стандартной системы Лоренца. Показано, что в модифицированном генераторе Лоренца реализуются режимы как регулярных, так и хаотических автоколебаний. Получена дискретная модель генератора с инерционной нелинейностью. Проведено исследование на устойчивость состояний равновесия системы. Представлены графики амплитудных спектров хаотических и регулярных автоколебаний.
Система лоренца, хаотическая динамика, дискретное время, нелинейные дв-системы, автогенератор с инерционной нелинейностью, амплитудные спектры, хаотические автоколебания
Короткий адрес: https://sciup.org/140255961
IDR: 140255961
About generators of dynamic chaos on the basis of the modified Lorentz's models
A mathematical model of self-oscillating system - modified Lorentz oscillator obtained by converting a standard Lorenz system is presented. It is shown that in the modified Lorentz oscillator are implemented regimes both regular and chaotic self-oscillations. A discrete model of self-oscillator with an inertial nonlinearity is obtained. The stability of the equilibrium states of the system is investigated. Graphics of amplitude spectra of chaotic and regular self-oscillation are presented.
Текст научной статьи О генераторах динамического хаоса на основе модифицированной модели Лоренца
1. Модифицированная система Лоренца
Анализ системы уравнений (1) с позиций электронной схемотехники позволяет предложить схему генератора Лоренца , изображенную на рис. 1 (переключатель в положении П1).
Схема содержит интегрирующие RC -цепи с системными функциями H i ( p ) = 1 / ( p т i + 1), операционные усилители с коэффициентами передачи ki , перемножители и сумматор. Часть схемы, расположенная выше пунктирной линии, представляет собой апериодический усилитель, нижняя часть – инерционную нелинейную цепь обратной связи с двумя входами. По классификации П.С. Ланды [4; 5] подобные системы относится к генераторам с инерционным самовозбуждением.
Изменим схему цепи обратной связи, превра- тив ее в одновходовую, переведя переключатель в положение П2 . Преобразованную таким образом автоколебательную систему назовем модифицированным генератором Лоренца (МГЛ) [6].
Динамика МГЛ описывается следующими уравнениями состояния для нормированных напряжений Un (t)
|
dU 1 = dt |
1 k --U 1 + 1 U 2 , т 1 т 1 |
|
|
dU 2 = dt |
--U 2 + — ( 1 - U 3 ) U 1 , т 2 т 2 |
(2) |
|
dU 3 = dt |
- — U 3 + k 3 U 2 . т 3 т 3 |
Здесь напряжения нормированы так, что выходы перемножителей связаны с их входами соотношением Up = U y U 2 . Формально уравнения (2) содержат шесть параметров, но нормировка времени и двух напряжений позволяет сократить их число до четырех. В частности, в стандартной модели Лоренца используются обозначения о = Т 2 / т 1 , b = Т 2 / Т 3 , r = k^, а kkк з ^ = 1.
Результаты численного интегрирования уравнений (2) позволяют сделать вывод о том, что в МГЛ реализуются режимы как регулярных, так и хаотических автоколебаний. Для примера на рис. 2, а и рис. 2, б приведены усредненные амплитудные спектры U 1 (ro) напряжения U 1 ( t )
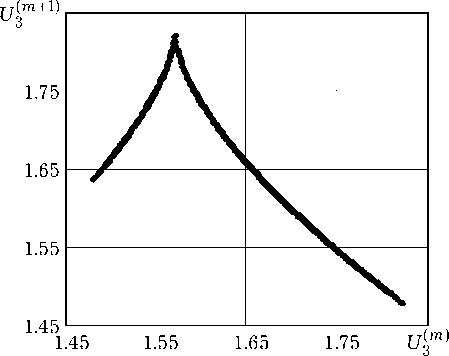
Рис. 3. Отображение первого возвращения
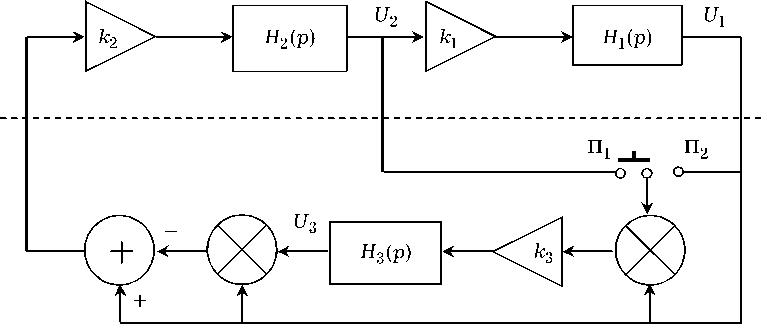
Рис. 1. Схема генератора Лоренца
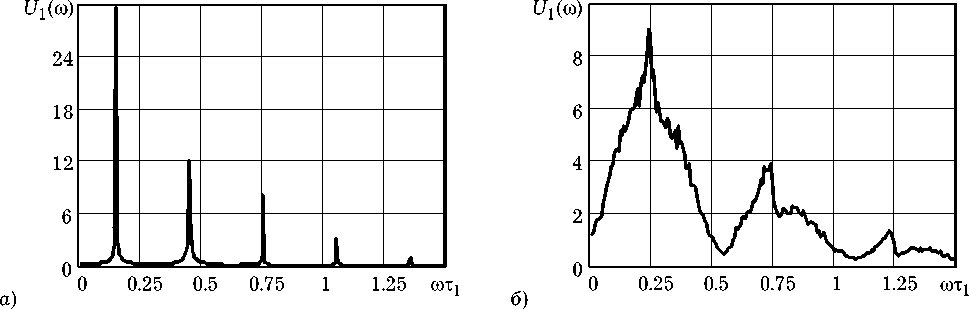
Рис. 2. Усредненный амплитудный спектр напряжения в МГЛ
в генераторе с параметрами k i = 0.45, k 2 = 22.73, k s T 1 T - 1 = 1, т 2 = 9.1Т 1 , а также Т 3 = 10т 1 (рис. 2, а ) или Т 3 = 3.33Т 1 (рис. 2, б ).
Очевидно, что первый из спектров, состоящий из дискретных линий, отвечает режиму периодических автоколебаний. В то время как, спектр на рис. 2. б в соответствии с прагматическим определением хаоса указывает на режим хаотических автоколебаний.
Качественно характеристики динамического хаоса в МГЛ близки к характеристикам анало- гичных процессов в стандартной системе Лоренца. Например, степень сжатия фазового объема аттрактора характеризует представленное на рис. 3. отображение первого возвращения. Оно получено на основе последовательности координат U3(m) точек в сечении Пуанкаре поверхности kgU2 - U3 = 0. Общий вид графика на рис. 3 полностью соответствует графику отображения первого возвращения в стандартной модели Лоренца [7].
Таким образом, генератор, определяемый уравнениями состояния (2), представляет собой простую радиофизическую систему с режимом хаотических автоколебаний, пригодную для практических применений в численных экспериментах по нелинейной динамике. Кроме того, он допускает переход к дискретному времени без введений в схему дополнительных временных задержек.
-
2. ДВ-генератор с инерционной нелинейностью
Систему уравнений состояния (2) удобно использовать при моделировании автоколебаний методами численного интегрирования задачи
Коши [8]. Но при переходе к дискретному времени ее целесообразно преобразовать, исключив из первых двух уравнений переменную U2(t). В результате получим систему d2x dx 22
+ 2to + to-r-. x — k^ (D-t-j dt2 sdt p pp dy 2
— — -topy + k topx . c3c dt
( 1 - y ) x ,
Здесь x ( t ) — U i (t ), y ( t ) — U 3 ( t ) и введены обозначения
2to s —--+ , т1 t2
to c — , t3
to p — J — и kp — k 1 k 2 • N T 1 T 2
Первое из уравнений системы (3) запишем в форме интегрального Вольтера второго рода t
X ( t ) — J f ( x (t), у (т)) h ( t - t) d т + X ( t ) • (4)
где f (x, y) — (1 - У) x, функция времени X(t) описывает свободный процесс в линейной системе (при kp — 0). Ядро уравнения (4) h(t - t) — импульсная характеристика, удовлетворяющая дифференциальному уравнению d2h dh 22
—-—+ 2 to s + to p h — k p to p 5( t )
dt 2 dt p pp
с дельта-функцией в правой части и нулевыми начальными условиями. Отметим, что свободный процесс X ( t ) удовлетворяет однородному уравнению (5) и зависит от начальных условий.
Решением (5) при t > 0 является функция h (t) — kp
. p = exp ( -to s t ) sinh Uto 2 - to p t ) • (6)
J to 2 - to 2 sp
Нетрудно показать, что отсчеты характеристики (6) на равномерной временной сетке t n — n A t при n > 2 удовлетворяют разностному уравнению
L2{h(tn)} ^ h(tn) - 25 cosh (^to^ - top At) x X h(tn-1) + 52h(tn-2) — 0, где
5 — exp ( -to s A t ) ,
С использованием отсчетов h(tn ) создадим последовательность to hd (t) — At ^ h (tm )5( t - tm). (8)
m — 0
С ее помощью проведем дискретизацию времени в уравнении (4), заменив импульсную характеристику h ( t ) на последовательность (8). После интегрирования для значений решения на временной сетке tn получим уравнение дискретной свертки
n
X ( t n ) — A t ^ f ( x ( t k ), y ( t k ) ) h ( t n - t k ) + X ( t n ). (9) k — 0
Теперь обе части уравнения (9) подвергнем воздействию разностного оператора L 2 { ° } • При n > 2 это приводит к следующему результату:
L 2 { x ( t n ) } — f ( x ( t n - 1 ), y ( t n - 1 ) ) h (A t )A t • (10)
Отметим, что в процессе преобразования правой части (10) использованы равенство h (0) — 0, уравнение (7) и аналогичное ему уравнение L 2 { X (t n ) } — 0.
Аналогичным образом, с помощью отсчетов hy(tn) импульсной характеристики hy(t) — k3toc exp (-toct) проводится дискретизация времени во втором уравнении системы (3). Результат дискретизации
y ( t n ) — о y ( t n - 1 ) + k 3 to c x 2( t n )A t • (11)
В динамике нелинейных ДВ-систем численный алгоритм вида (10)–(11) становится самостоятельным объектом исследований. Он задает динамическую систему, свойства которой могут существенно отличаться от свойств моделируемого аналогового прототипа.
Введя в рассмотрение частоту дискретизации to d — 2n / A t и пересчитав в ее единицах все остальные частоты (Q s —to s / to d , Q d —to d / to d , Q c — to c / to d ) уравнения движения ДВ-системы для функций дискретного аргумента x [ n ] — — д/2nQ ск з x ( tn ), y [ n ] — y ( tn ) запишем в виде
x [ n ] — a 1 x [ n -1] + a 2 x [ n - 2] +
+ Y ( 1 - y [ n - 1] ) x [ n - 1], (12)
y[n] — оy[n - 1] + x2[n] , n — 2,3, ••• и начальным условиям h (10) — h (0) — 0,
k to2 5 I 1 —z-----—
h(t1) — h(At) — . p p = sinh Um^ - top At too - ton '
sp
В уравнениях использованы обозначения a 1 — 25 cosh ( 2л^ - Q p ) , a2 — -52 , y — 2n , kp Q p 5 sinhf J Q 2 - Q 2 ,
TQf^Qp s p)

уМ
5 = exp ( -2nQ s ) , о = exp ( -2nQ c ) .
Начальное состояние ДВ-системы задается значениями x [0], x [1], y [0] и y [1].
Уравнения (12) содержит четыре независимых параметра: частоты Q s , Q p , Q c и коэффициент глубины положительной обратной связи kp . Впрочем, вместо kp независимым можно считать параметр у. При различных комбинациях их значений реализуются как регулярные, так и хаотические режимы автоколебаний.
Отметим также, что еще один алгоритм вида (12) для генерации автоколебаний в дискретном времени предложен в работе [9]. Общностью алгоритмов является управление коэффициентом передачи в кольце усилителя и обратной связи (первое из уравнений (12)) с помощью нелинейной инерционной цепи, функционирующей в соответствии со вторым уравнением (12). На основании такой общности ДВ-систему с уравнениями движения (12) будем обозначать как автогенератор с инерционной нелинейностью. Отметим при этом, что коэффициенты перво-
1.5
0.5
в)
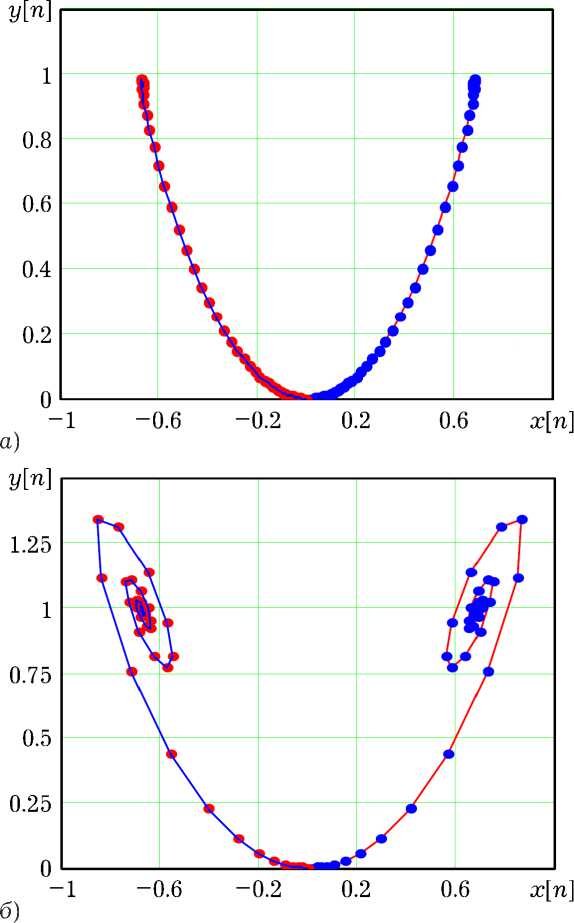
Рис. 5. Траектории ДВ-системы на плоскости ( х , у )
0.9 ;г[п]
-1.5 -0.9 -0.3 0.3
го из уравнений (12) определяются не колебательными процессами, как это имеет место в алгоритме работы [9], а процессами релаксации.
-
3. Режимы ДВ-генератора с инерционной нелинейностью
Система (12) при у > 0 имеет три состояния равновесия:
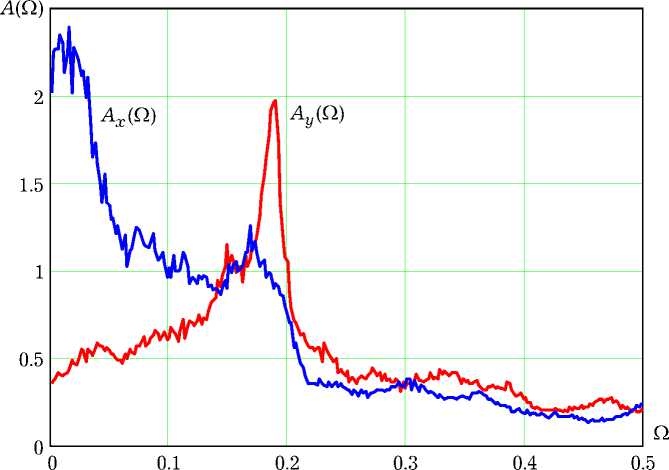
Рис. 6. Усредненные амплитудные спектры процессов x [ n ] и y [ n ]
( x 0 , У 0 ) 0 = ( 0,0 ) ,
( x 0 , y 0 ) 1 = ^ V (1 - g )(1 - У - 1(1 - а 1 - а 2 )),
1 - У 1(1 - а 1 - а 2 )
( x 0 , y 0 ) 2 = ^ - V (1 - о )(1 - У - 1(1 - а 1 - а 2 )),
1 - у-1(1 -« 1 -а 2 )
Об их устойчивости можно судить по величине корней характеристических уравнений линеаризованных систем.
Для состояния ( x 0 , У 0 ) 0 линеаризованная система имеет вид
x [ n ] = а 1 x [ n -1] + а 2 x [ n - 2] + у x [ n - 1],
У [ n ] = o y [ n - 1], n = 2,3,...
Ей соответствуют характеристические уравнения
Z 22 - ( а 1 + Y ) Z 1,2 - а 2 = 0 и Z 3 = о . (13)
При выполнении условия
0 < у < 1 - а 1 - а2
все три корня таковы, что Z i | < 1. Следовательно, состояние ( x 0 , У 0 ^ устойчиво.
При у > 1 - а 1 - а 2 в зависимости от начальных условий система (12) переходит в одно из состояний ( x 0 , У 0 ) 1 или ( x 0 , У 0 ) 2 , которые с ростом у сохраняют устойчивость до тех пор, пока модуль одного из корней характеристического уравнения
Z 3 - ( о + а 1 + У ( 1 - у 0 - 2 x 0 ) ) Z 2 +
+ ( оа 1 + оу(1 - У 0 ) - а 2 ) Z + ста 2 = 0
не превысит единицу. После этого система переходит в автоколебательный режим, образованный переходами между состояниями ( x 0 , У 0 ) 1 и
( x 0 , У 0 V
Граница режима автоколебаний в пространстве параметров системы может быть определе- на путем численного решения уравнения max (| Zi (У, Q s, Q p, Q c |) = 1.
На рис. 4 приведены зависимости модулей корней характеристических уравнений от параметра глубины обратной связи у при фиксированных значениях Q„ = 0.07, Q = 0.01 и Q„ = 0.1. sp c
Рис. 4, а отвечает корням уравнения (13), а рис. 4, б – уравнения (14).
Для указанных значений параметров Q s , Q p и Q c верхняя граница устойчивости состояния ( x 0 , У 0 ) 0 приблизительно соответствует величине у = 2.562 ■ 10 3, а верхняя граница устойчивости состояний ( x 0 , У 0 ) 1 или ( x 0 , У 0 ) 2 — величине у = 1.032.
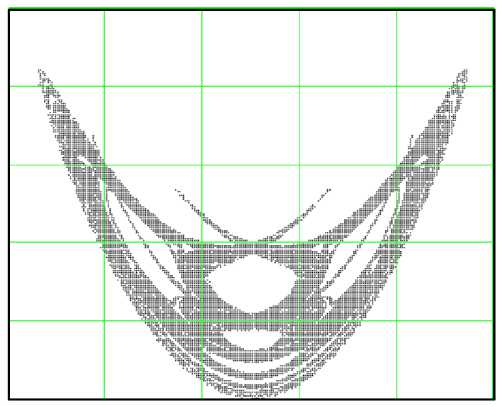
Рис. 5 на плоскости ( x [ n ], y [ n ] ) отображает траектории перехода от неустойчивого состояния ( x 0 , У 0 ) 0 в окрестности состояний ( x 0 , У 0 ) 1 и ( x 0 , У 0 )„ . Плоскость ( x [ n ], y [ n ] ) на рис. 5, а ха-2 - 3
рактерна для значений 2.562 ■ 10 <у< 0.038, при которых особые точки (x0, У0 )1 и (x0, У0 )2 являются устойчивыми узлами. Траектории на рис. 5, б типичны для 0.038 < у < 1.032, когда особые точки (x0, У0 )1 и (x0, У0 )2 — устойчивые фоку-
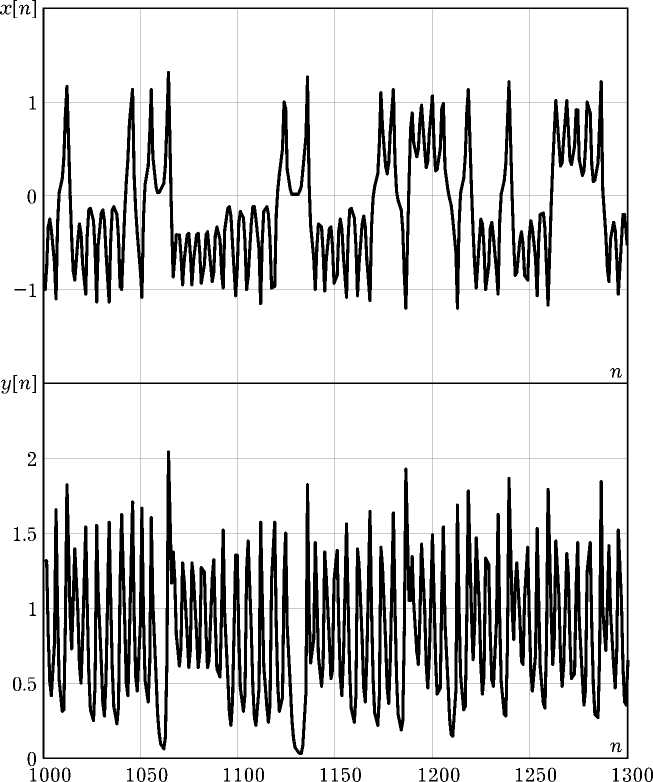
Рис. 7. Отрезки реализаций процессов x [ n ] (вверху) и y [ n ] (внизу)
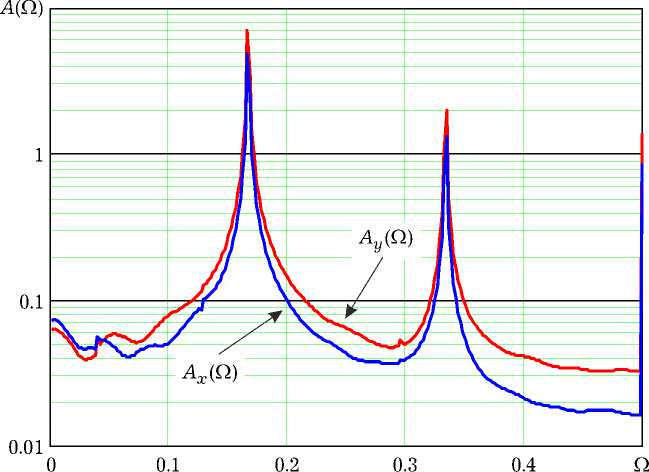
Рис. 8. Амплитудные спектры процессов x [ n ] и y [ n ]
сы. При у > 1.032 в ДВ-системе (12) наблюдаются регулярные автоколебания в окрестности одного из состояний ( x о , Уо ) 1 или ( X q , Уо ) 2 , которые при дальнейшем увеличении у хаотизируются за счет переходов между этими состояниями.
Аттрактор хаотического режима на рис. 5, в формируется при значении у = 1.34. Поскольку сплошной спектр служит одним из эвристических критериев [3] динамического хаоса, рис. 6, на котором приведены усредненные амплитудные спектры A x (Q) и A y (Q) сигналов x [ n ] и y [ n ] (их реализации показаны на рис. 7), подтверждает хаотичность аттрактора. Оценки спектров получены методом Бартлетта с 512-точечным преобразованием Фурье по отрезкам реализаций (см. рис. 7) из 65536 отсчетов. Для сравнения на рис. 8 даны амплитудные спектры регулярных автоколебаний, наблюдаемых при у = 1.07. Из спектра A y (Q) на рисунках удалена постоянная составляющая.
Список литературы О генераторах динамического хаоса на основе модифицированной модели Лоренца
- Лоренц Э.Н. Детерминированное непериодическое течение // В кн: Странные аттракторы; под ред. Я.Г. Синая, Л.П. Шильникова. М.: Мир, 1981. С. 88-116.
- Лихтенберг А., Либерман М. Регулярная и хаотическая динамика. М.: Мир, 1984. 528 с.
- Многоликий хаос / Е.Ф. Мищенко [и др]. М.: Физматлит, 2013. 432 с.
- Бабицкий В.И., Ланда П.С. Автоколебания в системах с инерционным возбуждением // ДАН СССР. 1982. Т. 26. № 5. С. 1083-1089.
- Неймарк Ю.И., Ланда П.С. Стохастические и хаотические колебания. Изд. 2-е. М.: Либроком, 2009. 426 с.
- Зайцев В.В., Карлов Ар.В., Сарников А.Ю. Модифицированный генератор Лоренца и характеристики его автоколебаний // Физика и технические приложения волновых процессов: тезисы докладов Х Международной конференции (г. Самара, 19-24 сентября 2011 г.). Самара: Книга, 2011. С. 275-277.
- Берже П., Помо И., Видаль К. Порядок в хаосе. М.: Мир, 1991. 368 с.
- Хайер Э., Нёрсетт С., Ваннер Г. Решение обыкновенных дифференциальных уравнений. Нежесткие задачи. М.: Мир, 1990. 512 с.
- Зайцев В.В., Карлов А.В. (мл) Хаотические автоколебания в ДВ-осцилляторе с инерционной нелинейностью // Физика и технические приложения волновых процессов: тезисы докладов X Всероссийской науч.-техн. конференции. Самара: Книга, 2011. C. 262-264.
- Зайцев В.В., Карлов Ар.В., Нураев Д.Б. Генератор хаотических автоколебаний в дискретном времени // Информационные технологии в электротехнике и электроэнергетике: материалы IX Всероссийской науч.-техн. конференции. Чебоксары: Чуваш. ун-т, 2014. C. 213-215.
