О моделировании пястно-запястного сустава большого пальца руки

Автор: Селюцкий Ю.Д., Досаев М.З., Су Ф.-Ч., Чанг Ч.-Х.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 (60) т.17, 2013 года.
Бесплатный доступ
Актуальность исследования суставов большого пальца руки определяется той важной ролью, которую этот палец играет в нормальном функционировании всей кисти. Совместной российско-тайваньской группой ученых исследуется пястно-запястный сустав с целью создания адекватной математической модели этого сустава. Такой механико-математический аппарат необходим для дальнейшего практического приложения – создания искусственного сустава. Специалистами факультета прикладной биомедицины Национального университета Чен Кун (Тайвань) с помощью компьютерной томографии проведены серии экспериментов, в которых регистрировались ( in vitro ) относительные положения костей, составляющих этот сустав: первой пястно-запястной кости и кости-трапеции. В то же время в Научно-исследовательском институте механики Московского государственного университета имени М.В. Ломоносова построена кинематическая модель сустава в виде двух цилиндрических шарниров, оси которых представляют собой произвольно расположенные скрещивающиеся прямые. Подобный подход в современной научной литературе считается одним из самых перспективных. Авторами предложена методика и построен алгоритм идентификации индивидуальных параметров рассмотренной модели по экспериментальным данным. По результатам численного счета показано, что предложенная методика позволяет в несколько раз снизить максимальное абсолютное расхождение расчетных и экспериментальных характеристик сустава по сравнению с соответствующими значениями, представленными в литературе. Тем не менее максимальная относительная невязка по длине измеренного и расчетного вектора, соединяющего опорные точки двух костей, достигла 55%. В связи с этим в модель были добавлены дополнительные степени свободы, соответствующие перемещению центров шарниров вдоль некоторых прямых, жестко связанных с костями сустава. Таким образом, модель содержит 14 параметров. После их идентификации удалось снизить максимальную невязку по длине измеренного и расчетного векторов до 9%, а разницу по расчетным и измеренным углам ориентации – до 5%.
Пястно-запястный сустав, пястная кость, трапеция, эксперименты in vitro, кинематическая модель, идентификация параметров
Короткий адрес: https://sciup.org/146216091
IDR: 146216091 | УДК: 531/534:[57+61]
Текст научной статьи О моделировании пястно-запястного сустава большого пальца руки
Большой палец руки играет ключевую роль в нормальном функционировании всей кисти. Наиболее сложным и в то же время наиболее важным для обеспечения «нормального» движения всего пальца является пястно-запястный сустав. Этот сустав (рис. 1) образован двумя костями и является разновидностью двухосных суставов – седловидным суставом. Он образован дистальной суставной поверхностью кости-трапеции и проксимальной суставной поверхностью первой пястной кости. Необходимо отметить, что геометрия пястно-запястного сустава значительно варьируется у разных индивидуумов.
Клиническая практика показывает, что этот сустав часто страдает от артрита [5]. Поэтому исследование свойств данного сустава с прицелом на разработку эффективных протезов является весьма актуальным.
С этим связано наличие обширной литературы – как медицинской, так и биомеханической, посвященной экспериментальному и теоретическому исследованию пястно-запястного сустава и, в частности, кинематики этого сустава. Так, в статьях [3, 4] описаны эксперименты in vitro , в которых регистрировались пространственные координаты наборов точек большого пальца при разных его положениях относительно кисти. На базе этой информации определялось направление осей вращения (сгибание/разгибание и приведение/отведение) в суставах большого пальца. Показано, что эти оси можно считать фиксированными по отношению к костям пальца. Следует отметить, что во всех работах зафиксирован весьма широкий диапазон изменения параметров рабочего пространства большого пальца у разных людей. В статьях [1, 6, 7] описаны механические модели большого пальца, представляющие собой кинематическую цепь, которая состоит из нескольких жестких стержней, соединенных цилиндрическими шарнирами. В них считается целесообразным с точки зрения повышения точности описания кинематики пальца и усилия на его кончике моделировать пястно-запястный сустав с помощью двух цилиндрических шарниров, оси которых не перпендикулярны и не пересекаются.
Однако задача построения адекватной модели пястно-запястного сустава еще далека от разрешения. Для этого представляется необходимым разработать такую модель, которая бы достаточно точно описывала область движений пальца, регистрируемую в экспериментах, и в то же время включала как можно меньше степеней свободы и параметров, подлежащих идентификации по результатам экспериментов.

Рис. 1. Положение пястно-запястного сустава в кисти руки
В настоящей работе описаны исследования, проведенные совместной российско-тайваньской группой ученых из Национального университета Чен Кун ( NCKU , Тайнань) и НИИ механики МГУ имени М.В. Ломоносова. В NCKU проведены две серии экспериментов по регистрации положения костей, образующих пястнозапястный сустав. Была разработана методика определения характерных точек на этих костях и формирования систем координат, связанных с этими костями. В НИИ механики МГУ имени М.В. Ломоносова построена математическая модель сустава и проведена попытка ее верификации на основе полученных экспериментальных данных. Показано, что использование предлагаемой в литературе модели с двумя степенями свободы не обеспечивает достаточно точного описания относительных положений костей. В связи с этим в модель введены две дополнительные степени свободы, соответствующие «проскальзыванию» костей друг относительно друга. Была создана оригинальная методика и построен алгоритм идентификации параметров модели. Определены значения параметров, которые позволили достичь достаточно хорошего согласования с экспериментальными данными.
Экспериментальные исследования
Для изучения взаимного положения костей, образующих пястно-запястный сустав, на факультете биомедицины NCKU были проведены две серии экспериментов in vitro . В каждой из этих серий использовался свой образец руки. Рука при этом закреплялась в фиксаторе, а к сухожилиям мышц большого пальца с помощью специального устройства прикладывалась сила.
В экспериментах первой серии некоторая фиксированная сила прикладывалась по очереди к одному из сухожилий мышц большого пальца. Были задействованы сухожилия следующих мышц: flexor pollicis longus ( FPL ), extensor pollicis longus ( EPL ), abductor pollicis longus ( APL ), abductor pollicis brevis ( APB ), adductor pollicis ( ADD ) (в указанном порядке). Величины прикладываемой силы составляли 0; 0,2; 0,5; 0,7 кгс (для ADD нагрузку в 0,7 кгс реализовать не удалось из-за технических ограничений). Таким образом, всего было исследовано 19 различных положений большого пальца.
В экспериментах второй серии (рис. 2), в отличие от предыдущих, сила прикладывалась одновременно к нескольким сухожилиям указанных мышц большого пальца таким образом, чтобы кончик большого пальца находился в одном из четырех заданных положений (в основании одного из других пальцев руки) и на нем развивалось заданное усилие (измеряемое с помощью датчика нагрузки). Всего было проведено

Рис. 2. Экспериментальный стенд
12 экспериментов: большой палец в «нейтральном» положении (нагрузка к сухожилиям не приложена), кончик большого пальца прижат к основанию указательного пальца (усилие на кончике 0; 0,2; 0,4 кгс), кончик большого пальца прижат к основанию среднего пальца (усилие на кончике 0; 0,2; 0,4 кгс), кончик большого пальца прижат к основанию безымянного пальца (усилие на кончике 0; 0,2; 0,4 кгс), кончик большого пальца прижат к основанию мизинца (усилие на кончике 0; 0,2 кгс).
В ходе экспериментов с помощью компьютерной томографии регистрировались положения первой пястной кости и кости-трапеции, после чего на базе полученных данных рассчитывались положения характерных точек на этих костях. Затем по этим точкам в соответствии методикой, описанной в статье [2], определялись координаты центра О M основания первой пястной кости и углы, задающие ориентацию осей системы координат O M X M Y M Z M , связанной с первой пястной костью, относительно неподвижной системы координат O T X T Y T Z T , связанной с костью-трапецией.
Модель с двумя степенями свободы
Сначала была предпринята попытка воспользоваться известным из литературы подходом и, как было описано выше, ограничиться двумя цилиндрическими шарнирами со скрещивающимися и неперпендикулярными осями (рис. 3). Первый из этих шарниров жестко связан с костью-трапецией и моделирует сгибание/разгибание ( F–E ). Второй жестко связан с первой пястной костью и моделирует приведение/отведение ( A–A ).
В рамках этого подхода имеют место следующие соотношения:
e Mx MAA ( ф 2 ) M FE ( Ф 1) е Tx , e My M AA ( Ф 2 ) M FE ( ф 1) е Ty , e Mz M AA ( Ф 2 ) M FE ( Ф 1 ) е Tz ,
O T O M = O T O 1 + M fe ( Ф 1 ) Г 1 + M aa ( Ф 2 ) M fe ( Ф 1К
Здесь e Mx , y , z и e Tx , y , z – орты осей координат, связанных с первой пястной костью и с трапецией соответственно; ф 12 - углы поворота вокруг осей первого и второго шарнира; Mfe ( Ф 1 ) и МAA ( ф 2) - соответствующие матрицы поворота; O T O 1 , г 12 -некоторые постоянные векторы.
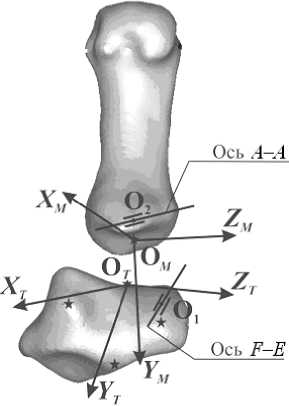
Рис. 3. Модель пястно-запястного сустава, содержащая два шарнира со скрещивающимися и неперпендикулярными осями
Таким образом, модель содержит десять параметров: четыре параметра, определяющие направления осей первого и второго шарниров, три компоненты вектора O T O 1 и три компонента вектора r 1 . Отметим, что эти параметры являются индивидуальными и могут различаться (вообще говоря, достаточно сильно) для разных людей. Соответственно, они различны для экспериментов первой и второй серий. В то же время углы поворота необходимо подбирать для каждого положения отдельно – так, чтобы обеспечить минимальное рассогласование между расчетными и экспериментально зарегистрированными положениями первой пястной кости.
Отметим, что задачу идентификации параметров можно решать в два этапа: сначала определить направления осей шарниров и углы поворота вокруг этих осей, а уже затем найти векторы O T O 1 , r 1 и r 2 . При этом r 2 при заданных прочих параметрах определяется однозначно по положению, принятому в качестве номинального (в обеих сериях экспериментов в качестве такового использовалось положение пальца до прикладывания нагрузки). Такой подход позволяет существенно уменьшить объем вычислений, которые необходимо произвести в ходе идентификации параметров.
На первом этапе с помощью метода покоординатного спуска были определены направления осей шарниров. При этом для каждого положения углы поворота в шарнирах определялись путем минимизации функционала, равного корню из суммы квадратов углов между расчетными и экспериментальными координатными осями.
Результаты расчетов приведены в табл. 1 и 2 ( α x , y , z – углы между расчетным и измеренным направлением осей O M X M , O M Y M , O M Z M соответственно).
Таблица 1
Ориентация осей для экспериментов серии 1
|
Мышца |
Сила, кгс |
α x |
α y |
α z |
Мышца |
Сила, кгс |
α x |
α y |
α z |
|
FPL |
0 |
0,8 |
0,9 |
0,7 |
APL |
0,5 |
11,2 |
7,8 |
10,0 |
|
FPL |
0,2 |
1,1 |
0,8 |
1,3 |
APL |
0,7 |
11,4 |
7,8 |
11,3 |
|
FPL |
0,5 |
2,2 |
1,5 |
2,0 |
APB |
0 |
1,3 |
0,9 |
1,5 |
|
FPL |
0,7 |
2,7 |
2,1 |
1,7 |
APB |
0,2 |
1,9 |
2,0 |
0,8 |
|
EPL |
0 |
0,7 |
0,8 |
0,3 |
APB |
0,5 |
4,0 |
3,2 |
2,4 |
|
EPL |
0,2 |
2,3 |
2,4 |
0,9 |
APB |
0,7 |
5,7 |
5,1 |
2,7 |
|
EPL |
0,5 |
9,9 |
6,5 |
10,0 |
ADD |
0 |
1,2 |
1,4 |
1,5 |
|
EPL |
0,7 |
11,4 |
7,5 |
11,3 |
ADD |
0,2 |
1,5 |
1,0 |
1,5 |
|
APL |
0 |
1,3 |
1,4 |
0,6 |
ADD |
0,5 |
0,4 |
0,4 |
0,3 |
|
APL |
0,2 |
11,0 |
7,9 |
9,5 |
Таблица 2
Ориентация осей для экспериментов серии 2
|
Положение |
Усилие, кгс |
α x |
α y |
α z |
Положение |
Усилие, кгс |
α x |
α y |
α z |
|
Нейтральное |
0 |
0,1 |
0,1 |
0,1 |
2 |
0,4 |
1,6 |
2,1 |
2,6 |
|
1 |
0 |
2,7 |
8,6 |
8,9 |
3 |
0 |
3,0 |
3,0 |
3,9 |
|
1 |
0,2 |
3,2 |
3,9 |
3,6 |
3 |
0,2 |
0,5 |
0,9 |
1,0 |
|
1 |
0,4 |
5,5 |
7,9 |
7,3 |
3 |
0,4 |
4,7 |
6,4 |
5,9 |
|
2 |
0 |
5,4 |
6,6 |
6,3 |
4 |
0 |
8,0 |
5,0 |
7,2 |
|
2 |
0,2 |
1,0 |
2,3 |
2,2 |
4 |
0,2 |
5,1 |
5,0 |
6,5 |
Максимальная невязка по ориентации первой пястной кости составляет 11,4 ° . При этом для 60% положений углы не превышают 4 ° . Такой уровень точности представляется вполне приемлемым. Таким образом, ориентацию первой пястной кости в рамках данного подхода удается описать достаточно хорошо.
Следующим этапом идентификации параметров является определение параметров, отвечающих за описание положения первой пястной кости (т.е. за положение точки O M ).
С помощью метода покоординатного спуска в сочетании с методом наименьших квадратов были определены значения компонентов векторов O T O 1 и r 1 , обеспечивающие наименьшую разницу между расчетным и экспериментальным положениями указанной точки. Результаты приведены в табл. 3 и 4 ( в - угол между расчетным и измеренным направлением вектора O T O M ; A r - относительная невязка по длине O T O M , т.е. разность расчетной и измеренной длин этого вектора, отнесенная к измеренной длине).
Максимальная относительная невязка по длине вектора O T O M составила 55% для первой серии и 44% для второй, а угол между расчетным и измеренным векторами достиг 19 ° для первой серии и 24 ° для второй. Таким образом, данная модель не позволила определить положение точки O M с достаточной точностью.
Таблица 3
Положение точки O M для экспериментов серии 1
|
Мышца |
Сила, кгс |
в, град |
A r , % |
Мышца |
Сила, кгс |
в, град |
A r , % |
|
FPL |
0 |
0,0 |
0 |
APL |
0,5 |
5,3 |
16 |
|
FPL |
0,2 |
1,6 |
5 |
APL |
0,7 |
0,7 |
6 |
|
FPL |
0,5 |
3,3 |
13 |
APB |
0 |
2,8 |
16 |
|
FPL |
0,7 |
3,3 |
19 |
APB |
0,2 |
13,9 |
25 |
|
EPL |
0 |
1,1 |
5 |
APB |
0,5 |
18,1 |
33 |
|
EPL |
0,2 |
19,1 |
33 |
APB |
0,7 |
17,8 |
42 |
|
EPL |
0,5 |
3,5 |
11 |
ADD |
0 |
5,2 |
12 |
|
EPL |
0,7 |
3,7 |
7 |
ADD |
0,2 |
0,7 |
9 |
|
APL |
0 |
1,1 |
5 |
ADD |
0,5 |
1,2 |
14 |
|
APL |
0,2 |
16,5 |
55 |
Таблица 4
Положение точки OM для экспериментов серии 2
|
Положение |
Усилие, кгс |
в, град |
A r , % |
Положение |
Усилие, кгс |
в, град |
A r , % |
|
Нейтральное |
0 |
0 |
0 |
2 |
0,4 |
11,3 |
20 |
|
1 |
0 |
14,6 |
26 |
3 |
0 |
6,5 |
13 |
|
1 |
0,2 |
11,0 |
22 |
3 |
0,2 |
12,7 |
25 |
|
1 |
0,4 |
9,46 |
20 |
3 |
0,4 |
10,67 |
19 |
|
2 |
0 кгс |
16,1 |
28 |
4 |
0 |
22,8 |
42 |
|
2 |
0,2 кгс |
11,7 |
20 |
4 |
0,2 |
24,1 |
44 |
Модель с дополнительными степенями свободы
Одним из возможных способов модификации модели является увеличение числа степеней свободы. Были введены две дополнительные степени свободы, соответствующие перемещению центров шарниров вдоль прямых ^ т и ^м , жестко связанных соответственно с костью-трапецией и с первой пястной костью (рис. 4).
В рамках предложенной модели формула для расчета положения начала системы координат, связанной с первой пястной костью, приняла следующий вид:
O т O м = O т O1 + Mfe (ф^ + Maa (^2) Mfe (Ф1)г2 + x1e т + x 2 Maa (^2) Mfe (Ф1)e м , где x12 - смещения вдоль осей ^т и ^м; eт, eм - единичные векторы осей ^т и ^м.
Модифицированная модель содержит четырнадцать параметров, которые подлежат идентификации на базе экспериментальных данных: к параметрам, описанным ранее, добавляются четыре параметра, определяющие направления осей ^ т и ^ м относительно систем координат, связанных с соответствующими костями (эти параметры также являются индивидуальными и могут отличаться для разных людей). Кроме того, для каждого положения требуется определить соответствующие ему значения координат x 1 и x 2 .
Для идентификации дополнительных параметров была проведена серия расчетов (при этом для остальных параметров и углов поворота вокруг осей шарниров были приняты значения, определенные на предыдущем этапе). В ходе этих расчетов с помощью метода покоординатного спуска определялись значения параметров модифицированной модели пястно-запястного сустава, обеспечивающие минимальное отклонение расчетных данных от экспериментальных.
В результате были получены следующие оценочные значения параметров: для серии 1:
efe =(0; 0; 1)T, eaa =(—0,13; 0,36; 0,92)T, eT =( 0,91; 0,39; 0,14) T, e M =( 0,33; -0,71; 0,62) T, r1 =(22,4; 15,6; 5,5)T, r2 =(23,0; -77,6; 20,5)T ;
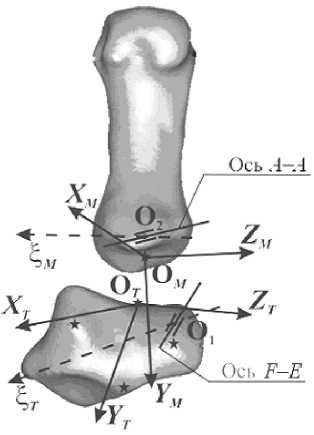
Рис. 4. Уточненная модель пястно-запястного сустава для серии 2:
efe = (-0,15; 0,35; 0,92) T, eaa =(-0,04; 0,58; 0,82) T, eT =( 0,27; 0,76; 0,59) T, em =(-0,15; -0,78; 0,61) T, r1 =( 26,2; -54,5; -72,5) T, r2 =(-1,9; -7,0; -52,2) T, где eFE , eAA – единичные векторы осей шарниров, заданные в системах координат, связанных с костью-трапецией и с первой пястной костью, соответственно; eT ,eM – единичные векторы осей ^T и ^M .
Результаты расчетов приведены в табл. 5 и 6:
Таблица 5
Положение точки O M для экспериментов серии 1 (модифицированная модель)
|
Мышца |
Сила, кгс |
Р, град |
A r , % |
Мышца |
Сила, кгс |
Р, град |
A r , % |
|
FPL |
0 |
0 |
0 |
APL |
0,5 |
1,1 |
3 |
|
FPL |
0,2 |
0,9 |
2 |
APL |
0,7 |
1,3 |
4 |
|
FPL |
0,5 |
1,2 |
2 |
APB |
0 |
2,5 |
4 |
|
FPL |
0,7 |
4,9 |
9 |
APB |
0,2 |
0,4 |
1 |
|
EPL |
0 |
0,4 |
1 |
APB |
0,5 |
2,5 |
5 |
|
EPL |
0,2 |
3,4 |
6 |
APB |
0,7 |
3,4 |
6 |
|
EPL |
0,5 |
2,2 |
5 |
ADD |
0 |
3,5 |
6 |
|
EPL |
0,7 |
0,2 |
1 |
ADD |
0,2 |
0,1 |
0 |
|
APL |
0 |
1,1 |
2 |
ADD |
0,5 |
2,4 |
4 |
|
APL |
0,2 |
3,5 |
7 |
Таблица 6
Положение точки O M для экспериментов серии 2 (модифицированная модель)
|
Положение |
Усилие, кгс |
Р, град |
A r , % |
Положение |
Усилие, кгс |
Р, град |
A r , % |
|
Нейтральное |
0 |
0 |
0 |
2 |
0,4 |
1,3 |
4 |
|
1 |
0 |
2,1 |
4 |
3 |
0 |
0,6 |
2 |
|
1 |
0,2 |
2,3 |
7 |
3 |
0,2 |
0,7 |
2 |
|
1 |
0,4 |
2,5 |
8 |
3 |
0,4 |
2 |
9 |
|
2 |
0 |
1,6 |
5 |
4 |
0 |
0,2 |
1 |
|
2 |
0,2 |
1,4 |
4 |
4 |
0,2 |
0,6 |
4 |
Видно, что выбранные значения параметров обеспечивают достаточно хорошее согласование с экспериментальными данными. Так, максимальное значение угла в составляет 4,9 ° , а максимальное значение A r - 9%. При этом для 83% экспериментальных положений пальца р < 3 ° , для 72% положений A r < 5% .
Заключение
Таким образом, использование для описания кинематики пястно-запястного сустава большого пальца руки модифицированной модели, содержащей, помимо вращательных, также и поступательные степени свободы, представляется целесообразным. По-видимому, этот результат коррелирует с данными о наличии «проскальзывания» первой пястной кости относительно кости-трапеции, недавно полученными тайваньской стороной.
Работа выполнена при поддержке Российского фонда фундаментальных исследований (грант № 10-08-92001) и Тайваньского национального совета по науке.
Список литературы О моделировании пястно-запястного сустава большого пальца руки
- Cerveri P., De Momi E., Marchente M., Baud-Bovy G., Scifo P., Barros R.M.L., Ferrigno G. Method for the estimation of a double hinge kinematic model for the trapeziometacarpal joint using MR imaging//Computer Methods in Biomechanics and Biomedical Engineering. -2010. -Vol. 13, No. 3. -P. 387-396.
- Cheze L., Dumas R., Comtet J.J., Rumelhart C., Fayet M. A joint coordinate system proposal for the study of the trapeziometacarpal joint kinematics//Computer Methods in Biomechanics and Biomedical Engineering. -2009. -Vol. 12, No. 3. -P. 277-282.
- Hollister A., Buford W.L., Myers L.M., Giurintano D.J., Novick A. The axes of rotation of the thumb carpometacarpal joint//Journal of Orthopaedic Research. -1992. -Vol. 10, No. 3. -P. 454-460.
- Imaeda T., Niebur G., Cooney W.P., Linscheid R.L., An K.N. Kinematics of the normal trapeziometacarpal joint//Journal of Orthopaedic Research. -1994. -Vol. 12, No. 2. -P. 197-204.
- Kovler M., Lundon K., McKee N., Agur A. The human first carpometacarpal joint: osteoarthritic degeneration and 3-dimensional modeling//J. Hand Ther. -2004. -Vol. 17, No. 4. -P. 393-400.
- Pearlman J.L., Roach S.S., Valero-Cuevas F.J. The fundamental thumb-tip force vectors produced by the muscles of the thumb//Journal of Orthopaedic Research. -2004. -Vol. 22, No. 2. -P. 306-312.
- Valero-Cuevas F.J., Johanson M.E., Towles J.D. Towards a realistic biomechanical model of the thumb: the choice of kinematic description is more critical than the solution method or the variability/uncertainty of musculoskeletal parameters//Journal of Biomechanics. -2003. -Vol. 36, No. 7. -P. 1019-1030.
