О нелокальном использовании результатов локального анализа динамических систем

Автор: Дубровский Анатолий Федорович, Дубровский Сергей Анатольевич, Алюков Сергей Викторович, Алюков Александр Сергеевич, Якупов Олег Рифкатович, Прокопьев Кирилл Валерьевич
Рубрика: Расчет и конструирование
Статья в выпуске: 4 т.20, 2020 года.
Бесплатный доступ
Численным методам интегрирования дифференциальных уравнений движения динамических систем, несмотря на их крайне широкое распространение в инженерной и научной деятельности, присущи определенные недостатки. Так, получив численное решение дифференциальных уравнений для конкретной точки пространства параметров динамической системы (что с точки зрения инженерной практики соответствует конкретной конструкции технического объекта), в общем случае нельзя гарантировать, что результаты будут справедливы для других точек данного пространства (для других конструкций). Такое обобщение, нелокальное использование результатов локального анализа, возможно лишь в том случае, если исследуемая динамическая система обладает определенными свойствами. В статье рассматривается вопрос: при каких условиях результаты, полученные при построении законов движения исследуемой динамической системы численным интегрированием дифференциальных уравнений движения ее математической модели (т. е. «просчетом» одной точки пространства параметров), могут быть использованы «нелокально», т. е. могут быть распространены на все пространство конструктивных параметров исследуемой динамической системы? Для решения вопроса о возможности «нелокального использования результатов локального анализа динамических систем» достаточно привести уравнения движения исследуемой динамической системы к нормальному виду и далее убедиться в том, что в расширенном пространстве конструктивных параметров исследуемой динамической системы правые части упомянутой выше нормальной формы удовлетворяют условиям Липшица. В настоящей статье на примере динамической системы, описывающей движение транспортного средства с адаптивной подвеской по непрямолинейному дорожному профилю, рассматривается вопрос возможности обобщения результатов локального анализа на нелокальную область.
Адаптивная подвеска, математическая модель, анализ динамических систем
Короткий адрес: https://sciup.org/147233492
IDR: 147233492 | УДК: 629.1.07 | DOI: 10.14529/engin200401
On the nonlocal use of the results of local analysis of dynamic systems
Numerical methods of integration of differential equations of motion of dynamic systems, despite their extremely widespread use in engineering and scientific activities, have certain disadvantages. So, having obtained a numerical solution of differential equations for a specific point in the space of parameters of a dynamic system (which, from the point of view of engineering practice, corresponds to a specific design of a technical object), in the general case, it cannot be guaranteed that the results will be valid for other points of this space (for other structures). Such a generalization, non-local use of the results of local analysis, is possible only if the dynamical system under study has certain properties. The article considers the question: under what conditions the results obtained in the construction of the laws of motion of the investigated dynamic system by numerical integration of the differential equations of motion of its mathematical model (that is, by “calculating” one point of the parameter space) can be used “nonlocally”, i.e. can be extended to the entire space of design parameters of the investigated dynamic system? To solve the problem of the possibility of “non-local use of the results of local analysis of dynamical systems”, it is sufficient to bring the equations of motion of the dynamical system under study to a normal form and, further, make sure that in the expanded space of design parameters of the dynamical system under study, the right-hand sides of the above-mentioned normal form satisfy the Lipschitz conditions. In this article, using the example of a dynamic system describing the movement of a vehicle with an adaptive suspension along a non-straight road profile, the issue of the possibility of generalizing the results of local analysis to a non-local area is considered.
Текст научной статьи О нелокальном использовании результатов локального анализа динамических систем
В настоящее время при построении законов движения динамических систем [1], т. е. при решении задачи Коши («начальная» задача) [2, 3] или при построении периодического решения [3] дифференциальных уравнений движения динамических систем, как правило, авторы используют «численное» решение. При этом анализируется лишь одна точка пространства параметров динамической системы. Однако в завершении исследования, никак это не обосновывая, авторы пытаются обобщить полученные выводы на всё пространство параметров динамической системы. В общем случае это, конечно же, недопустимо. Такой переход к «нелокальному использованию результатов локального анализа» возможен лишь в том случае, когда исследуемая динамическая система обладает некоторыми специальными свойствами [4].
Поскольку данная проблема общеизвестна [4] и возникает всякий раз при «численном» построении законов движения динамических систем, т. е. несомненно актуальна, рассмотрим более подробно ее решение на примере построения законов движения автомобиля с адаптивной подвеской по непрямолинейному профилю дорожного покрытия.
-
1 . Расчетная схема автомобиля с адаптивной подвеской, принятые допущения
Итак, рассмотрим динамическую модель переднеприводного автомобиля с адаптивной подвеской [5], движущегося по непрямолинейному дорожному покрытию (см. рисунок).
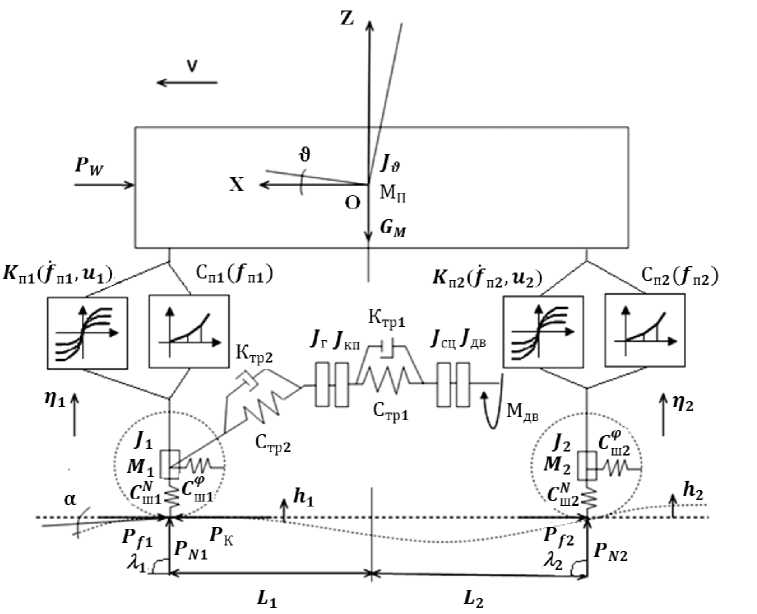
Расчетная схема транспортного средства с адаптивной подвеской
На рисунке введены следующие обозначения: J ДВ - маховик, имитирующий вращающиеся детали и звенья приводного двигателя; J СЦ - маховик, имитирующий вращающиеся детали диска сцепления и приведенные к нему ведущие звенья коробки передач; J КП - маховик, имитирующий вращающиеся детали ведомых звеньев коробки передач; J Г - маховик, имитирующий вращающиеся детали от синхронизатора включенной передачи до их колес автомобиля; С П1 (f П1 ), С П2 (f П2 ) - функциональные аналоги упругих элементов с нелинейной рабочей характеристикой передней и задней подвесок, соответственно; K П1 (f П1, u 1 ), K П2 (f П2 , u 2 ) - функциональные аналоги адаптивных амортизаторов передней и задней подвесок соответственно; f П1 , f П2 - деформация передней и задней подвески соответственно; u 1 , u 2 - управляющие воздействия на адаптивные амортизаторы передней и задней подвески соответственно; С ТР1 , С ТР2 , K ТР1 , K ТР2 - коэффициенты жесткости и демпфирования соответствующих участков трансмиссии; CN ш1 , CN ш2 , C ϕш1 , C ϕш2 - коэффициенты нормальной и угловой жесткости шин колес передней и задней осей соответственно; α - угол спуска (подъема);
ϑ - угол поворота подрессоренной массы в плоскости XOZ ; M П - масса подрессоренная; М 1 , М 2 - массы неподрессоренные, передняя и задняя соответственно; η 1 , η 2 - перемещения вертикальные соответствующих неподрессоренных масс; h 1 , h 2 - высота неровностей дорожного профиля под соответствующими колесами; P k - сила тяги; P f1 , P f2 - силы сопротивления качению соответствующих колес; P N1 , P N2 - реакции нормальные соответствующих колес; λ 1 , λ 2 - углы наклона нормальных реакций; P W - сила сопротивления воздуха.
При составлении динамической модели автомобиля приняты следующие допущения:
-
– движение плоское (в поперечной плоскости движение отсутствует), т. е. высота неровностей дороги под левыми и правыми бортами одинаковая и перемещение неподрессоренных масс
происходит только перпендикулярно плоскости дороги, в продольном направлении вместе с подрессоренной массой;
-
– рассматриваются легковые автомобили среднего класса сегмента B длиной до 4,2 м;
-
– рассматриваются переднеприводные автомобили;
-
– проскальзывание в точке контакта колеса с опорной поверхностью отсутствует;
-
– не учитывается диссипация энергии в пружинах подвески, сайлентблоках и т. п.;
-
– не учитывается деформация сайлентблоков и подобных элементов подвески.
-
2 . Математическая модель транспортного средства с адаптивной подвеской
При разработке динамической модели за основу была взята модель, предложенная авторами В.А. Умняшкиным, Н.М. Филькиным, Р.С. Музафаровым [6]. Новизна нашей модели заключается в рассмотрении переднеприводного автомобиля с адаптивной подвеской, а также наличии разработанных функциональных аналогов упругих элементов с нелинейной рабочей характеристикой и адаптивных амортизаторов, характеризующихся семейством нелинейных рабочих характеристик, математическое описание которых представляет собой функцию двух переменных - скорости перемещения штока и управляющего параметра.
С учетом принятых допущений исследуемая динамическая система имеет десять степеней свободы. Запишем вектор обобщенных координат:
q= COI{X Z fl ^ 1 ф^ ф^ ф^ ф г ф к J.
Здесь: X - продольное перемещение автомобиля; Z - перемещение подрессоренной массы вертикальное; ϑ - угол поворота подрессоренной массы в плоскости XOZ ; η 1 , η 2 - перемещения вертикальные соответствующих неподрессоренных масс; ϕ дв , ϕ сц , ϕ кп , ϕ г - углы поворота деталей соответствующих участков трансмиссии.
Следует отметить, что исследуемая динамическая система содержит неголономные связи. Поэтому составление математической модели движения автомобиля на основе уравнений Лагранжа второго рода в данном случае неприемлемо. Для составления математической модели движения исследуемой динамической системы воспользуемся особой формой уравнений Лагранжа второго рода – уравнениями Лагранжа второго рода с избыточными координатами [7]:
d фТТ \ ФТ , дП , ФФ А V 2 , ,
-
“ ад^ )- д^ + д^ + д^ -^ + ^=1 Я^ (1)
Здесь: Т – кинетическая энергия системы; П – потенциальная энергия системы; Ф – диссипативная функция Рэлея, характеризующая скорость рассеяния механической энергии; Q k – обобщенная сила, соответствующая к -й обобщенной координате qk; q - оператор - оператор дифференцирования по переменной t ; A - множители Лагранжа [10]; hik - дополнительные функции «Лагранжа»; k ∈ {1, 2, …, 12}.
Избыточные координаты не являются независимыми. Поэтому к уравнениям (1) следует добавить уравнения, связывающие избыточные координаты с независимыми обобщенными коор- динатами:
d^ Nl = 0; dX N2 dt ; dt .
Здесь: “d ^1 , ^d ^ 2 - проекции векторов скоростей точек N 1 и N 2 на ось OX .
Рабочий режим движения исследуемой динамической системы – переходный процесс, пред- ставляющий собой «наезд автомобиля на неровность и последующий её проезд». В математической постановке реализация этого процесса [8–11] соответствует решению задачи Коши с задан- ными начальными условиями:
Х(О)=Х о ; Z(O)=Z o ; fl(0) - fl0; ^ i (0) - ^1O; ^ 2 (0) - ^20;
ϕ дв (0)= ϕ дв0 ; ϕ сц (0) = ϕ сц0 ; ϕ кп (0)= ϕ кп0 ; (3)
ϕ 2 (0)= ϕ 20 ; ϕ k1 (0)= ϕ k10 .
Для использования в математической модели движения автомобиля [12–14] разработанных функциональных аналогов упругих элементов и регулируемых амортизаторов необходимо вычислить частные производные потенциальной энергии П и диссипативной функции Ф системы по обобщенным координатам и скоростям. Вычисление частной производной слагаемых потенциальной энергии системы, связанных с упругими элементами подвесок, по обобщенным координатам проводится по соотношению
а( П п 1 + П п 2 ) _ - Р п Чп 1 (f M^g^df, 1 . d$ Q п 2С п 2(f n 2(Z,V^ V 2))df n 2
dq dq dq "
Деформация упругих элементов Сп1 , Сп2 есть функция вертикального перемещения подрессоренной массы Z , угла поворота подрессоренной массы 5 и вертикальных перемещений непод-рессоренных масс ^ ^2. Выполним следующие преобразования:
d(
П
п
1
+
П
п
2
)
_
-Г
п
1С
пi
(f,M-Q.qiVjdf
n
1
.
d ]/
п
2 С
п2
. d$ Qп 2С п2 (f п2 (Z,d,q2)')df п 2 df 2
ния, получим d( П п 1 + П п 2 )
dZ
локального анализа, т. е. возможность распространения результатов анализа единственной (непосредственно «просчитанной») точки пространства (5) на все пространство (5).
Таким образом, для решения вопроса о возможности «нелокального использования результатов локального анализа динамических систем» достаточно привести уравнения движения исследуемой динамической системы к нормальному виду и далее убедиться в том, что в расширенном пространстве конструктивных параметров исследуемой динамической системы правые части упомянутой выше нормальной формы удовлетворяют условиям Липшица.
Выводы
В статье рассмотрен вопрос о правомерности нелокального использования результатов локального анализа при численном решении систем дифференциальных уравнений, описывающих движение динамических систем. Показано, что для обобщения решения, полученного в одной точке пространства параметров, на все определенное пространство необходимо, чтобы правые части системы, приведенной к нормальной форме, удовлетворяли условиям Липшица.
Обсуждение и применение
Актуальность проведенного в статье исследования не вызывает сомнений, так как проблема использования результатов «локального» эксперимента в нелокальной области параметров часто возникает при анализе динамических систем различной природы и назначения. Более конкретно полученные в статье результаты могут быть широко использованы при проектировании узлов автомобилей, например, при проектировании адаптивных подвесок с нелинейными упругими элементами и управляемыми амортизаторами с гипершироким семейством характеристик [5]. При этом возможно разработать адаптивные подвески, обеспечивающие высокий уровень комфорта водителя и пассажиров, высокий уровень плавности движения автомобиля, резкое снижение в конструкции динамических нагрузок на узлы и детали автомобиля, перевозимый груз, членов экипажа и пассажиров. Вместе с тем, разработанные подвески будут отличаться безопасностью движения транспортных средств, хорошей управляемостью и защитой от перегрузок в экстремальных условиях вождения. Все эти свойства очень важны с учетом далеко не идеальной дорожной сети России. Заметим, что доказательство возможности использования результатов «локального» эксперимента на нелокальную область параметров имеет универсальный характер и позволяет избежать многих ошибок при попытках обобщения результатов анализа конкретных конструкций динамических систем на все конструкции этих систем в области расширенного множества семейства этих конструкций [18–20].
Статья выполнена при поддержке Правительства РФ (Постановление № 211 от 16.03.2013 г.), соглашение № 02.A03.21.0011.
Список литературы О нелокальном использовании результатов локального анализа динамических систем
- Немыцкий, В.В. Качественная теория дифференциальных уравнений / В.В. Немыцкий, В.В. Степанов. – М.: ГИТТЛ, 1947. – 448 с.
- Степанов, В.В. Курс дифференциальных уравнений / В.В. Степанов. – М.: ГИФМЛ, 1957. – 400 с.
- Матвеев, Н.М. Методы интегрирования обыкновенных дифференциальных уравнений / Н.М. Матвеев. – М.: Высшая школа, 1967. – 555 с.
- Блехман, И.И. Синхронизация динамических систем / И.И. Блехман. – М.: Наука, 1971. – 896 с.
- Basic Characteristics of Adaptive Suspensions of Vehicles with New Principle of Operation / A. Dubrovskiy, S. Aliukov, S. Dubrovskiy, A. Alyukov // SAE Int. J. Commer. Veh. – 2017. – Vol. 10(1). DOI:10.4271/2017-01-0404.
- Умняшкин, В.А. Теория автомобиля / В.А. Умняшкин, Н.М. Филькин, Р.С. Музафаров. – Ижевск, 2006. – 230 с.
- Добронравов, В.В. Основы аналитической механики / В.В. Добронравов. – М.: Высшая школа, 1976. – 264 с.
- Zhang, Z.N. Optimizing the shape of top piston ring face using inverse method / Z.N. Zhang, J. Liu, Y.H. Tang // Industrial Lubrication and Tribology. – 2016. – № 40. – P. 1441–1453. DOI: 10.1108/ILT-06-2015-0090
- A thermal mixed lubrication model to study the textured ring/liner conjunction / C.X. Gu, X.H. Meng, Y.B. Xie, J.Z. Fan // Tribology International. – 2016. – № 101 – P. 178–193. DOI:10.1016/2016.04.024
- Becker, E.P. Trends in tribological materials and engine technology / E.P. Becker // Tribology International. – 2004. – № 37. – P. 569–575. DOI:10.1016/2003.12.006
- Deformation Analysis of the cylinder liner based on mechanical-thermal couplings / X.P. Zhu, S. Bai, Y. Chen, H.N. Song // Design and Manufacture of Diesel Engine. – 2013. – № 19(3). – P. 9–14.
- A mixed lubrication and oil transport model for piston rings using a mass-conserving algorithm / X.H. Meng, C.X. Gu, Y.B. Xie, W.X. Li // International Journal of Engine Research. – 2016. – №17(10). – P. 1062–1076. DOI:10.1016/2016.08.005
- Jeng, Y.R. Theoretical analysis of piston-ring lubrication part II-starved lubrication and its applications to a complete ring pack / Y.R. Jeng // Tribology Transactions. – 1992. – № 35(4). – P. 696–706. DOI:10.1080/10402009208982175
- Keribar, R. An integrate model of ring pack performance / R. Keribar, Z. Durunskaya, M.F. Flemming // ASME Journal of Engineering Gas Turbines and Power. – 1999. – № 113. – P. 382–389.
- Mishra, P.C. Tribodynamic modeling of piston compression ring and cylinder liner conjunction in high-pressure zone of engine cycle / P.C. Mishra // International Journal of Advanced Manufacturing Technology. – 2013. – № 66(5-8). – P. 1075–1085. DOI: 10.100/s00170-012-4390-y
- Numerical study on the tribological performance of ring/liner system with consideration of oil transport / C. Liu, Y.J. Lu, Y.F. Zhang et al. // ASME Journal of Tribology. – 2018. DOI:10.1115/1.4040510
- On the Transient three-dimensional tribodynamics of internal combustion engine top compression ring / C. Baker, R. Rahmani, H. Rahnejat, B. Fitzsimons // ASME Journal of Engineering for Gas Turbines and Power. – 2017. – № 139(6). DOI: 10.1115/1.4035282
- Koryagin, S.I. The effect of a polymer material coating on the stress state of plate building structures with holes / S.I. Koryagin, N.L. Velikanov, O.V. Sharkov // IOP Conference Series: Materials Science and Engineering. – 2020. – Vol. 913(2). – № 022045.
- Koryagin, S.I. Stress state of two-layer composite elements of curved shape / S.I. Koryagin, O.V.Sharkov, N.L. Velikanov// IOP Conference Series: Materials Science and Engineering. – 2020. – Vol. 843(1). – № 012008.
- Test diagnostics of engine systems in passenger cars / A. Gritsenko, V. Shepelev, E. Zadorozhnaya, K. Shubenkova // FME Transactions. – 2020. – Vol. 48(1). – P. 46–52.
