О повышении однозначности интерпретации электрических зондирований

Автор: Колесников В.П.
Журнал: Вестник Пермского университета. Геология @geology-vestnik-psu
Рубрика: Геофизика, геофизические методы поисков полезных ископаемых
Статья в выпуске: 2 (11), 2011 года.
Бесплатный доступ
Предложен новый способ повышения однозначности автоматической интерпретации площадных электроразведочных наблюдений методом ВЭЗ, основанный на использовании совокупности регуляризирующих элементов, вовлекаемых в интерпретационный процесс на основных его этапах. Приведены способы доопределения обратной задачи, общая схема построения алгоритма и приемы его реализации.
Вертикальное электрическое зондирование, компьютерная интерпретация, регуляризация, технология
Короткий адрес: https://sciup.org/147200768
IDR: 147200768 | УДК: 550.
About increase of unambiguity of electric sounding interpretation
A new method to improve the uniqueness of the automatic interpretation of the vertical electric sounding (VES) dates is proposed. It is based on the use of combination of regularizing elements, involved in the interpretive process in its basic stages. Extending of the inverse problem, the general scheme of algorithm constructing and methods for its implementation are given.
Текст научной статьи О повышении однозначности интерпретации электрических зондирований
Метод вертикального электрического зондирования (ВЭЗ) является одним из базовых методов электроразведки. В силу потребностей и интенсификации производства, специфики решаемых задач он находится в постоянном совершенствовании и развитии, требуя создания технологий, обеспечивающих оперативность, достоверность и геологическую содержательность получаемых результатов.
Наиболее сложным в развитии метода является этап количественной интерпретации, затрагивающий фундаментальные вопросы, связанные с некорректностью решения обратных задач. Ввиду некорректности наблюденным значениям электрического зондирования может соответствовать достаточно большой набор эквивалентных решений, отвечающих наблюденным данным с точностью до погрешностей полевых наблюдений δ (в рамках δ-эквивалентности), но в то же время способных существенно отличаться от истинного.
Одним из путей повышения однозначности решения некорректных задач является их доопределение за счет привлече- ния дополнительной информации, вовлекаемой в интерпретационный процесс на основе использования принципа регуляризации [2].
Практическая реализация данного подхода находится в стадии поиска и развития. Как показывает опыт работ [1], эффективность его применения требует разработки специальных способов и приемов регуляризации, максимально учитывающих специфику конкретного метода, его информационные возможности, особенности и обоснованность используемой априорной информации, вовлекаемой на тех или иных этапах интерпретационного процесса.
В данной работе рассмотрен один из таких подходов повышения однозначности автоматической интерпретации применительно к интерпретационной системе программ «Зонд» [1].
В случае метода электрического зондирования можно выделить ряд элементов регуляризации, способствующих повышению однозначности решения обратной задачи, с использованием различного рода дополнительной качественной и количе-
ственной априорной информации об искомом решении:
-
1) согласованность решения с имеющимися параметрическими данными, например, с результатами бурения скважин:
F p , a =Nkj r
j 1 k
где pkj r , k
E piскв pi min;
i 1
– наблюденные и рассчитанные по данным интерпретации кривые зондирования; p, pскв – искомые и определенные по скважинам мощности и удельные электрические сопротивления слоев p h , p i 1,n ; a – параметр регуляризации;
-
2) поиск решения в наиболее достоверных пределах (к примеру, в пределах эквивалентности решений) для каждого i-го слоя ( p i н , p i в ):
Nrk r , p 2 n 1
Ф p, Nkj rkj r, p 2npiвpi pi piнmi j1kj r i1
-
3) при условии гладкости границ:
Nk rk r, p 2 n12zх f p ,Y =Ekj rkj r, p n1 zi2х min
-
j 1 k j r i 1 х
где zх – глубина до i –й границы в точке с координатой х ;
-
4) при условии квазигоризонтальности границ:
I л
G z
A
где k – предельное значение возможного угла наклона границы; k = 0.29 соответствует углу наклоны границы, равному 16о;
-
5) в рамках чувствительности кривой зондирования к параметрам i-го слоя:

1л / \
При этом элементы регуляризации (1)–(5) должны использоваться при условии соответствия искомого решения точности полевых наблюдений 8 , т. е. в рамках δ-эквивалентности :
N r k j r j1 k
Практическая реализация отмеченных выше элементов регуляризации (1)-(6) может быть самой различной. Ею, в принципе, может служить любая совокупность вычислительных операций, нацеленных на получение решения в рамках погрешности наблюдений, наиболее согласующегося с имеющимися априорными представлениями об исследуемой модели геологической среды. Это можно рассматривать как своеобразный процесс ”закачки” различного рода дополнительной информации об искомом решении на соответствующих этапах автоматизированного интерпретационного процесса.
Ниже приводится один из вариантов его реализации с помощью алгоритма стабилизации решений. Блок - схема алгоритма приведена на рис. 1.
В качестве исходных данных на начальном этапе, помимо результатов полевых наблюдений – кривых зондирования и точности полевой сьемки (δ 0 ), предполагается использование геологических данных (результатов бурения скважин) и сведений о максимально возможной для данных условий степени изменчивости (градиента G) глубины залегания границ, а также количества вариантов (М) статистически генерируемых кривых зондирования для оценки параметров слоев и пределов их эквивалентности.
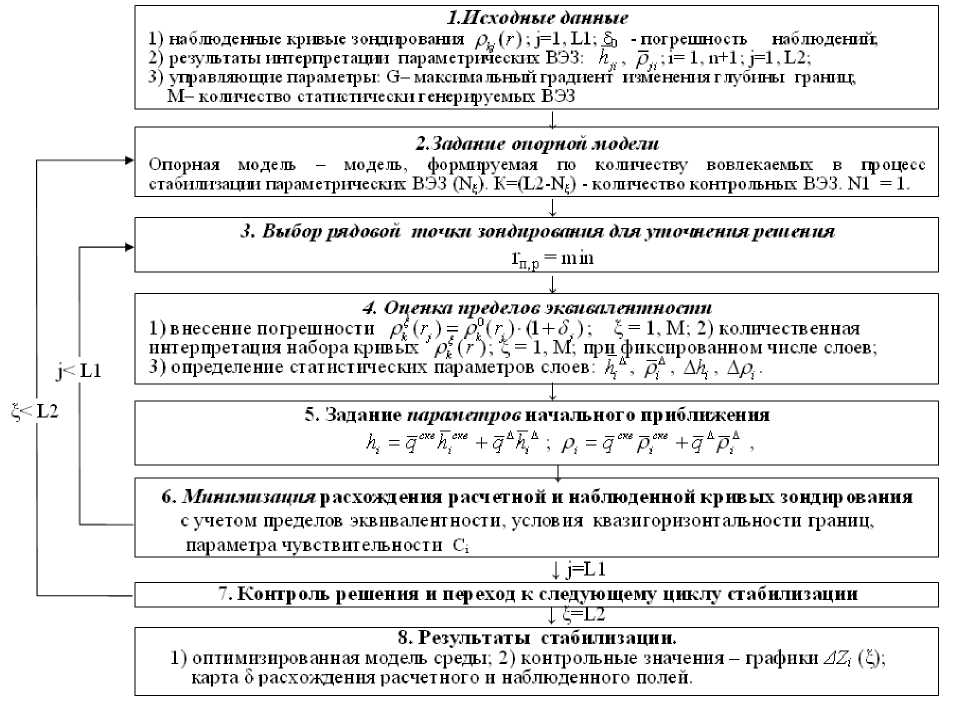
Рис.1. Блок-схема алгоритма стабилизации решения
Выполняемое на данном этапе согласование решения с параметрическими данными – один из наиболее ответственных этапов, так как связан с увязкой физической модели с реальным геологическим разрезом, включая выбор оптимального числа обобщенных геоэлектрических слоев, их литологическую и стратиграфическую привязку, выявление опорного горизонта и др., т.е. приведение априорной геологической информации в соответствие с геоэлектрической моделью исследуемой среды в рамках информационных возможностей метода.
Для реализации данного процесса создана специальная программа анализа параметрических зондирований (рис.2), которая позволяет на основе численного моделирования и визуального контроля подобрать решение в рамках δ-эквивалентности, отвечающее как инфор- мативности метода, так и его наибольшей согласованности с геологическим разрезом. При наличии данных бурения по нескольким скважинам в результате такого анализа получается соответствующая совокупность опорных параметрических решений, являющаяся основой для формирования опорной геоэлектрической модели.
При отсутствии параметрического материала в качестве опорных зондирований может быть использована совокупность зондирований, формируемых с помощью отмеченной выше программы по результатам предварительной формальной интерпретации электрических зондирований, выбираемых автоматически по совокупности оценочных параметров (наилучшей сходимости расчетной и наблюденной кривых ВЭЗ, степени согласованности решений и др.).
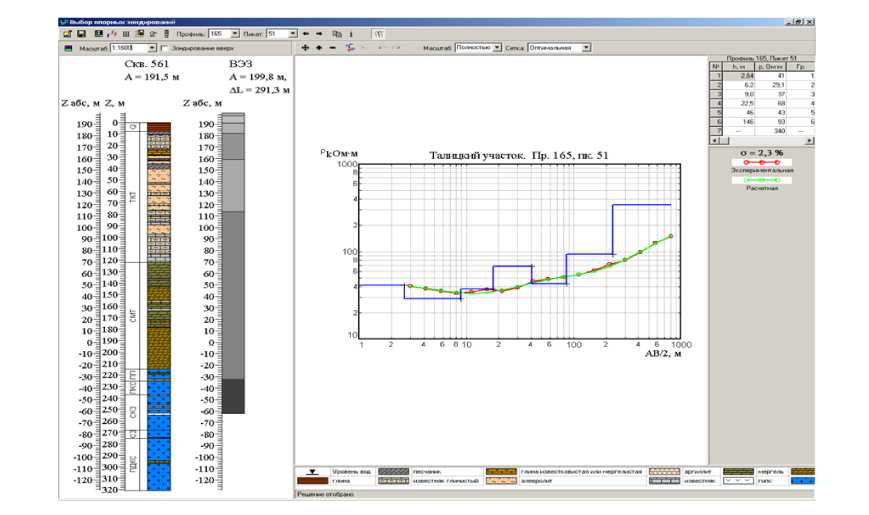
Рис.2. Пример визуализации результатов интерактивного анализа параметрического зондирования
Последующие блоки алгоритма (2–7) отображают автоматизированный процесс согласованной интерпретации совокупности зондирований с постепенным вовлечением опорных параметрических зондирований (формированием опорной модели).
На первом этапе из заданной совокупности параметрических ВЭЗ выбирается одна, принимаемая за опорную, остальные – используются в качестве контрольных. Процесс стабилизации решений начинается с выбора ближайшей к опорной рядовой точки зондирования. Для данной точки с помощью статистического моделирования выполняется оценка вероятностных значений и пределов эквивалентности параметров каждого i-го слоя. Данная процедура включает следующие операции:
-
1) получение репрезентативной выборки вариантов кривой зондирования в рамках заданной погрешности δ0 путем внесения погрешности в анализируемую кривую зондирования р ( г. ) :
Р-k j = k j ‘ + j , где
DD j ; K ср ;
K
_ 1 ;
Dср Dj ;
N j
D – случайные числа, генерируемые с помощью датчика случайных чисел; j=1,N; N – число разносов; δ0 – средняя относительная погрешность функции р , равная погрешности полевых наблюдений; ξ = 1, М;
-
2) количественная интерпретация набора сгенерированных кривых р , ^ =
1, М, выполняемая при фиксированном числе слоев n, соответствующем числу слоев, полученных в результате анализа параметрических зондирований;
-
3) статистический анализ полученных решений и определение вероятностных значений параметров слоев:
h i
;
L – количество параметров, для которых частота >;
-
a i = _ - _ • _
.=
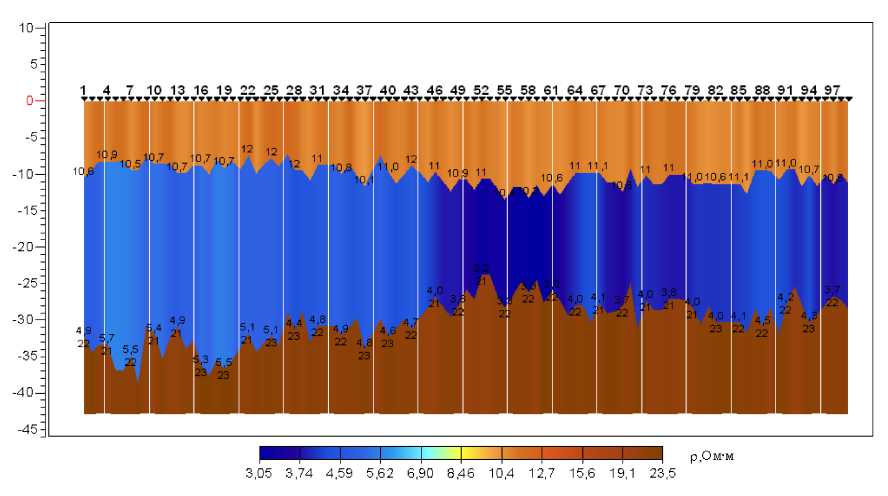
Рис.3. Пример статистического моделирования при погрешности наблюдений δ 0 = 5 % и количестве вариантов решения М=100
Графический пример статистического моделирования при заданной погрешности δ 0 = 5 % и числе генерируемых кривых зондирования М=100 приведен на рис. 3.
На основе полученных оценочных статистических параметров слоев, результатов анализа параметрических зондирований и степени их весомости формируются начальные приближения h i , ρ i , необходимые для поиска решения в процессе минимизации расхождения расчетной и наблюденной кривых зондирования:
-
h q сквhскв q h ;
скв скв i q i q i , где
-
а) h i скв , i скв - средние весовые значе
ния мощности и сопротивления i-го слоя (i=1,n; n – число слоев), вычисленные по совокупности параметрических ВЭЗ: hiскв Nqhiс , кв ; iскв Nq iс , кв ; ξ =
1,N; N – количество параметрических ВЭЗ;
-
б) q скв , q – весовые коэффициенты, учитывающие расстояние и погрешность
интерпретации наблюдений опорной и исправляемой точек зондирова ния:
q скв
^ скв q
q скв + q

;
d
;
q
0 оп .
где
i'
q

q скв + ci


;
;
% скв q
^A q

r
;
испр . т max
r N
z
0 r min q
r
оп . т , испр . т – погрешности интерпре-
тации опорной и исправляемой точек зон-
дирования; r – расстояние между выбранной рядовой до ξ-й опорной точками зондирования; r , r – минимальное и
максимальное расстояния между точками ВЭЗ и скважинами для данной площади;
в) h , – значения мощности и сопротивления i-го слоя по результатам статистического моделирования для выбранной точки ВЭЗ (см. п. 4).
Процесс минимизации, осуществляемый с использованием метода Ньютона (наискорейшего спуска), выполняется с
учетом условия квазигоризонтальности границ (4) и заданного предела чувствительности кривой p k (r) к изменению сопротивления каждого слоя (5) в рамках вероятностных пределов эквивалентности Δhmax.
Если получаемое в результате минимизации решение отвечает условиям его достоверности: (5 < 50 ; h i ≥ h i 1 ; С i >C 0 ; |д Z < A Z ), то данная точка ВЭЗ используется в качестве опорной при анализе последующих рядовых точек зондирования.
После завершения интерпретации всех L1 зондирований границы разреза сглаживаются в рамках δ-эквивалентности путем минимизации функционала (3) при условии (6).
Полученное на данном этапе решение при использованной для стабилизации одной опорной параметрической точки зондирования в целях оценки его точности сравнивается с данными анализа параметрических зондирований, не использованных в процессе стабилизации (контрольных параметрических ВЭЗ) (рис.4).
Параметрическая точка с наибольшим расхождением решений, указывающим на наибольшую потребность в априорных данных на данном участке, переводится в разряд опорных и интерпретации анализируемого массива кривых ВЭЗ повторяются с использованием для стабилизации решений уже двух параметрических зондирований. Данный процесс повторяется до тех пор, пока не будут исчерпаны все L2 параметрических точек зондирования. Получаемая при этом информация, отображающая динамику изменения величины расхождения количественных параметров в параметрических точках при соответствующей величине расхождения расчетного и наблюденного полей (рис.4), косвенно свидетельствует о точности и достоверности решений в рядовых точках зондирования в пределах исследуемой территории.
В качестве отладочного инструмента по развитию автоматической интерпретации предусмотрен вариант просмотра и, при необходимости, корректировки формируемой модели в режиме «рабочая модель» (рис. 5).
Как показала практика работ, по мере отладки и совершенствования алгоритма стабилизации необходимость в интерактивном режиме («рабочая модель») постепенно снижается, достигая к настоящему времени не более 10-15 %.
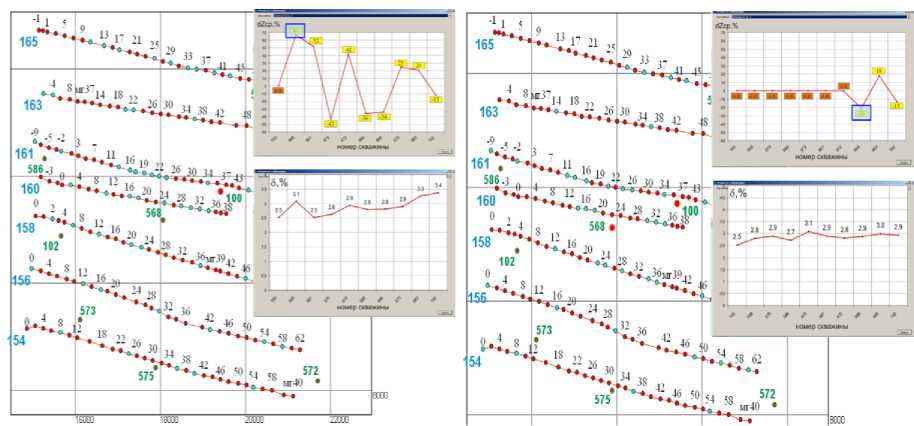
Рис.4. Фрагменты промежуточных этапов процесса стабилизации решений с контролем расхождения стабилизированных и контрольных решений Z ср в параметрических точках, а также точности совпадения расчетных и наблюденных кривых зондирования δ
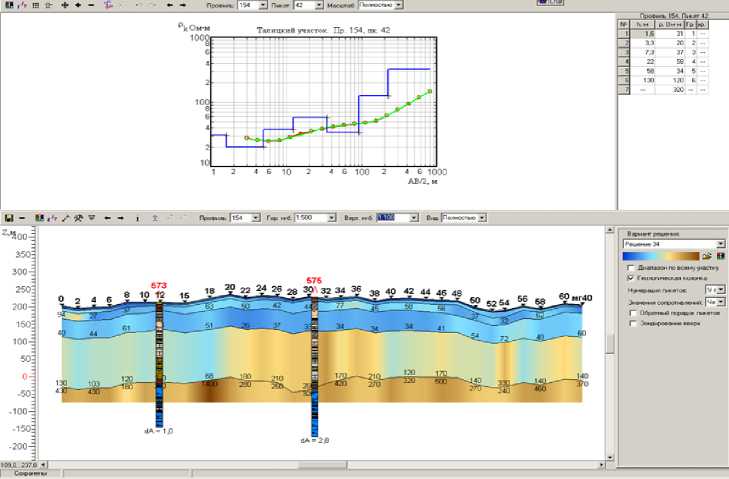
Рис.5. Фрагмент интерактивной интерпретации в режиме “рабочая модель”
Одной из задач дальнейшего повышения информативности получаемых решений является полная автоматизация данного процесса с выбором оптимального решения на основе перебора всех возможных вариантов задания управляющих па- раметров и опорных параметрических решений, формализующая тем самым опыт и элементы интеллекта интерпретатора, полная реализация которых в рамках обычной используемой интерактивной интерпретации практически невозможна.
Список литературы О повышении однозначности интерпретации электрических зондирований
- Колесников В.П. Основы интерпретации электрических зондирований. М: Научный мир, 2007. 248 с.
- Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. М.: Наука, 1974. 223 c.
