О влиянии трения на сжатие вытянутых призматических образцов

Автор: Ватульян А.О., Гусаков И.В.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 1 т.30, 2026 года.
Бесплатный доступ
Рассмотрена контактная задача осевого сжатия упругого вытянутого призматического образца нагружающими плитами с учетом трения в зоне контакта. Актуальность работы обусловлена необходимостью точной оценки упругих характеристик материалов со сложной структурой, таких как функциональноградиентные материалы, композиты и биоматериалы, где классические стержневые модели приводят к систематическим ошибкам до 20–30 % изза неучтенного трения и контактных эффектов. Для решения задачи использован вариационный подход в сочетании с методом Канторовича, который редуцирует трехмерную задачу линейной упругости к системе обыкновенных дифференциальных уравнений второго порядка с переменными коэффициентами для обобщенных перемещений. Получены аналитические решения в случаях произвольного и квадратного поперечного сечения при постоянных упругих характеристиках. Введен эффективный интегральный параметр трения – отношение касательных и нормальных обобщенных сил на торцах. Решена обратная задача восстановления упругих характеристик и параметра трения по данным о перемещениях в нескольких точках на боковой поверхности. Разработан итерационный алгоритм на основе принципа сжимающих отображений, обеспечивающий достаточно точное нахождение искомых параметров за 3–5 итераций для рассматриваемого набора начальных приближений. Кроме того, предложены приближенные асимптотические формулы на основе решений прямой задачи для быстрого восстановления параметров по измерениям в одной точке, с рекомендациями по выбору точек измерения перемещений на боковой поверхности. Численные эксперименты на синтетических данных, полученных из решения прямой задачи, подтверждают эффективность предложенных методов и устойчивость к их зашумлению (для итерационного алгоритма), демонстрируя превосходство над стержневыми моделями. Подход позволяет корректировать способы обработки экспериментальных данных компрессионных тестов, что особенно важно для образцов из биоматериалов и композитов, где трение существенно влияет на интерпретацию результатов.
Упрощенная модель, метод Канторовича, трение, коэффициент Пуассона, модуль Юнга, обратная задача, принцип сжимающих отображений
Короткий адрес: https://sciup.org/146283274
IDR: 146283274 | УДК: 539.3 | DOI: 10.15593/RZhBiomeh/2026.1.03
On the influence of friction in compression of elongated prism specimens
The contact problem of axial compression of an elastic, slender prismatic specimen by load-ing plates is considered, taking into account friction in the contact zone. The relevance of the work stems from the need for accurate evaluation of the elastic properties of materials with com-plex structures – such as functionally graded materials, composites, and biomaterials, where classical rod models produce systematic errors of up to 20–30 % due to neglected friction and contact effects. To solve the problem a variational approach combined with the Kantorovich method is used; this reduces the three-dimensional linear elasticity problem to a system of sec-ond-order ordinary differential equations with variable coefficients for generalized displacements. Analytical solutions are obtained for specimens with arbitrary and square cross-sections under constant elastic properties. An effective integral friction parameter is introduced – the ratio of tangential to normal generalized forces on the end faces. The inverse problem of reconstructing the elastic properties and the friction parameter from displacement data at several points on the lateral surface is solved. An iterative algorithm based on the contraction-mapping principle is developed, providing sufficiently accurate recovery of the unknown parameters in 3–5 iterations for the considered set of initial guesses. In addition, approximate asymptotic formulas based on solutions of the direct problem are proposed for rapid parameter recovery from measurements at a single point, together with recommendations for selecting measurement locations on the lateral surface. Numerical experiments on synthetic data generated by the direct problem confirm the effectiveness of the proposed methods and their robustness to noise (in the case of the iterative algorithm), demonstrating superiority over rod models. The approach enables improved pro-cessing of experimental compression test data, which is especially important for samples made of biomaterials and composites where friction significantly influences result interpretation.
Текст научной статьи О влиянии трения на сжатие вытянутых призматических образцов
Развитие науки и техники сопровождается исследованием большого числа материалов со сложной внутренней структурой – функционально-градиентных материалов, многокомпонентных композитов, а также це- лого класса природных материалов (трабекулярная и кортикальная кость, горные породы). Достаточно точная оценка упругих характеристик таких материалов необходима для корректного проведения КЭ-расчётов и последующей оптимизации деформационных и прочностных свойств технических и биомеханических кон-
0009-0009-6167-7537


Эта статья доступна в соответствии с условиями лицензии Creative Commons Attribution-NonCommercial 4.0 International
License (CC BY-NC 4.0)
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License (CC BY-NC 4.0)
струкций. Одним из наиболее распространённых и часто применяемых в лабораторной практике методов оценки упругих характеристик является одноосное сжатие: простота постановки эксперимента и ясность интерпретации кривых «нагрузка – деформация» делают его стандартом при исследовании не только канонических строительных материалов, но и биоматериалов и композитов. При этом классические стержневые модели, широко применяемые для обработки результатов одноосных испытаний, далеко не всегда адекватны: они не учитывают поперечную усадку, локальные пограничные слои и контактные эффекты, что порождает систематические ошибки при оценке модуля Юнга E и коэффициента Пуассона ν [1–4]. Например, в работе [1] показано, что недооценка модуля упругости E может достигать 20–30 % из-за неучтенного трения. Аналогичные систематические ошибки, связанные с эффектами трения, наблюдаются при тестировании пористых материалов, таких как полимерные пены, используемые в качестве аналогов трабекулярной кости [5].
В последние десятилетия наблюдается значительный рост числа экспериментальных исследований, посвященных одноосному сжатию костной ткани [6–15]. Обзоры существующих методов и попытки их стандартизации для материалов данного типа изложены в работах [16; 17]. В таких испытаниях ключевым фактором, определяющим точность интерпретации полученных данных, выступает трение в зоне контакта образца с нагружающими плитами. Несмотря на тщательную подготовку поверхностей (включая шлифовку и нанесение смазки), полное устранение трения остается недостижимым, особенно в случае пористых материалов. Для металлических образцов этот фактор проявляется в меньшей степени благодаря предсказуемым контактным свойствам.
Подходы к учету контактных эффектов в компрессионных тестах можно разделить на три категории: численное моделирование, апостериорную обработку данных и аналитические модели. Численные методы точны, но вычислительно затратны и требуют точной информации о множестве параметров [18]. Апостериорные – проще, но не всегда оценивают параметры контакта с достаточной точностью, особенно при наличии погрешности в данных [19]. Особое внимание уделим аналитическим моделям.
Классическим примером аналитического учета трения является решение Файлона [20] для цилиндра при полном прилипании, которое демонстрирует неоднородность осевых напряжений и бочкообразную деформацию, где модуль Юнга, рассчитанный по стержневой модели, зависит от отношения радиуса к высоте и коэффициента Пуассона. Это решение предполагает полное отсутствие проскальзывания на контактных поверхностях (бесконечный коэффициент трения), что приводит к аналитическому выражению для напряже- ний и смещений в упругом цилиндре, но не учитывает реальное деформирование с конечным коэффициентом трения.
В серии работ [21–24] развиваются аналитические модели учета трения в случае одноосного сжатия конечных цилиндров, включая изотропные и трансверсально-изотропные цилиндры. Авторами вводится частичное проскальзывание с конечным коэффициентом трения по кулоновскому закону. Выводятся точные выражения для неоднородных полей напряжений, демонстрируется бочкообразность боковой поверхности образца и ошибка в оценке модуля Юнга E (до 30 % в зависимости от геометрии и коэффициента Пуассона), предлагается корректирующий множитель для E , сложным образом зависящий от геометрии образца и коэффициента трения. Эти подходы позволяют корректировать обработку результатов и решать обратные задачи, но требуют априорного знания коэффициента трения.
Также отметим работу [25], где авторами разработан метод для одновременного определения модуля Юнга, коэффициента Пуассона и коэффициента трения из простого компрессионного теста на цилиндрических образцах. Получены аналитические решения для случаев полного прилипания и условий с конечным кулоновским трением, включая частичное и полное проскальзывание. Заметим, что граничные условия на боковой поверхности выполняются в среднем, что сделано авторами для упрощения задачи.
Однако все вышеперечисленные модели и результаты в основном ограничены цилиндрической геометрией. Призматическая геометрия особенно актуальна для образцов из биоматериалов, таких как трабекулярная кость, где образцы часто вырезают в форме прямоугольных призм для минимизации артефактов подготовки и удобства фиксации в испытательном оборудовании [7]. Для нецилиндрических форм аналитические решения редки и часто заменяются численными методами. Настоящая работа восполняет этот пробел. Рассмотрена контактная задача осевого сжатия призматического образца жесткими плитами с учетом трения. Вариационный подход в сочетании с методом Канторовича позволяет редуцировать рассматриваемую задачу к краевой задаче для системы обыкновенных дифференциальных уравнений для обобщенных перемещений. На этой основе решены прямая задача (распределение напряжений и деформаций) и обратная (восстановление упругих характеристик и параметра трения). Для обратной задачи предложен итерационный алгоритм на основе принципа сжимающих отображений. Подход обеспечивает низкозатратные вычисления по сравнению с КЭ-симуляциями, что полезно для обработки серий экспериментов для образцов из твердых биоматериалов. Также для обратной задачи предложены простые приближенные формулы для быстрой оценки упругих характеристик и параметра трения. Таким образом, работа вносит вклад в аналитические модели, позволяя учитывать трение и восстанавливать параметры для вытянутых призматических образцов в рамках контактного сжатия.
Постановка задачи
В рамках линейной теории упругости рассмотрим контактную [26] задачу сжатия упругого вытянутого призматического образца с произвольным поперечным сечением Qc R2 (Q - односвязная область с кусочногладкой границей dQ ) и высотой 2 h. Пусть 2 d - характерный поперечный размер области Q . Будем считать, что упругие характеристики образца зависят от продольной координаты x3 g [ - h , h ] .
Уравнения равновесия при отсутствии массовых сил имеют вид:
° ij, j = 0, i , J = 1,3.
Компоненты тензора напряжения подчиняются закону Гука
s j = 1 ( u i, j + u j , i ) .
В рассматриваемой задаче образец сжимается между двумя жесткими гладкими плитами. На торцах x 3 = ± h возникает нормальная контактная нагрузка, из-за возможного трения возникают касательные напряжения.
Рассмотрим вспомогательную задачу, в которой на торцах действуют неизвестные нормальное и касательные напряжения. Граничные условия во вспомогательной задаче могут быть записаны в виде:
x1, x2 g dQx [-h, h]: gijnj = 0, x3 = ± h : uз = ± 8, g33 = -p (x1, x2), °13 = -т1 (x1, x2 ), °23 =-T2 (x1,x 2 ), где 8 - заданное перемещение на торцах, p (x1, x2) и тi (x1, x2 ) - неизвестные функции контактного взаимо действия.
Редукция задачи методом Канторовича
Осуществим редукцию краевой задачи методом Канторовича [27; 28]. Введем безразмерный параметр 8 0 = 8 h —1 и безразмерные координаты:
^ = x-, n = x2, Z = x3 g[-1,1].
hhh
В безразмерных координатах поперечное сечение обозначим за S (также односвязная область с кусочногладкой границей). Воспользуемся упрощенной моделью для вытянутых (s = dh-1<1) образцов [29]. Для метода Канторовича в силу малости ε будем использовать следующие гипотезы о поле перемещений вида u1 (%,n, z) = % V1 (Z), u2 (%,n, Z) = nv2 (Z), (1)
u 3 (%, n,z) = v3 (z).
Гипотезы (1) соответствуют модели первого порядка. Использование аппроксимаций более высокого порядка (второго, третьего по поперечным координатам) в рамках настоящей работы не реализуется. Такие модели хотя и обладают большей точностью, но значительно уступают в простоте и наглядности, присущим модели первого порядка, что было показано в [29] в случае плоской задачи.
Введем функционал полной потенциальной энергии:
n= [ WdV - A ,
V где W =2CTJsJ
– удельная потенциальная энергия де- формации, A – работа поверхностных сил на верхнем и нижнем торцах
A = -2f ( P ( % , n ) V ( 1 ) + Ti ( % , n ) % v i ( 1 ) + т2 ( % , n ) n v 2 ( 1 ) ) dS . S
Введем следующие обобщенные параметры нагружения
P =[ p ( %,n ) dS , T 1 = f т ( %,n ) % dS , T 2 SS
= f т 2 ( %,n ) n dS . S
Находим компоненты тензоров деформации и напряжений, учитывая гипотезы (1). Подставляя их в выражение для функционала П, получим:
п=ЧТ
2 J- 1\
( Х + 2 ц ) ( v 2 + v 2 + ( v 3 ) ) + + 2 1 ( v 1 v 2 + v 1 v 3 + v 2 v 3 )
+н ( J 1 ( v T + J 2 ( v 2 ) 2 )
+2PV3 (1) + 2T1V1 (1) + 2T2 v2 (1), где введены обозначения: F = dS, J = %2 dS,
S 1 S
J 2 = £ n 2 dS .
Используем вариационный принцип Лагранжа [28]:
5П = 0.
Осуществляя варьирование и приравнивая к нулю коэффициенты при независимых вариациях, получим систему дифференциальных уравнений второго порядка с переменными коэффициентами
F ^ ( 1 + 2 ц ) v 1 + Х ( v 2 + v 3 ) ]- J 1 ( ц ' 1 ) = 0,
F [ ( Х + 2 ц ) v 2 + Х ( v 1 + v 3 ) ]- J 2 ( ц v 2 ) ’ = 0, (2)
(1( v + v 2)) +((Х + 2ц) v3) = 0, с граничными условиями
F [ ( ! + 2 ц ) v 3 +Х ( v i + v 2 ) ]| =— P , v ( 1 ) = - 8 0 ,
Z (3)
J 1 (ц ' 1 )|^= 1 = - T , J 2 (ц ' 2 )lz= 1 = - T 2 .
которое имеет 4 корня q = ± q 1 , q = ± q 2 . Общее решение (5) с учетом четности будет иметь вид:
'1 (Z) = 4ch (q1Z) + A2ch (q 2Z) + vP *, v 2 (Z) = A1^(q1) ch (q1Z)+A2ф( q 2) ch (q 2Z)+vP *,
/ x 1 - v ( J 2 . 1 V где ф( qi) =--1 — qi +;— I, i = 1,2.
v V 2 F 1 - v у
Коэффициенты A i определяются из второго и третьего граничных условий в (3).
Тогда, имея решения для функций v ( Z ) , v 2 ( Z ) , найдем v 3 ( Z ) из (4) при условии v 3 ( 1 ) = -5 0 .
Таким образом, получим точное аналитическое решение краевой задачи (2)–(3) при постоянных коэффициентах.
Решение для произвольного сечения
В общем случае задача (2)–(3) может быть решена лишь численно, однако в частном случае, если коэффициенты краевой задачи постоянные, можно построить аналитическое решение. При построении решения далее учтем, что v – нечетная, а v , v – четные функции по координате Z
Третье уравнение из (2) интегрируется, а произвольная константа находится из первого граничного условия в (3). Тогда можно выразить функцию v 3 ( Z )
, v t \ 2 v 2 + v - 1
’3 = П---( v i + v 2 ) + —----- P , (4)
1 - v 1 - v
где P = P / FE . Подставив v 3 ( Z ) в первые два уравнения из (2), после упрощений получим:
v 1

+ v 2

—
J v ‘ = 2 F 1
v ( 1 + v ) p*
1 - v
Решение для квадратного сечения
Более подробно рассмотрим случай квадратного сечения (2d = 2a - сторона квадрата, Ze[-s,s], pe[-s, s]) для краевой задачи (2)-(3) при постоянных коэффициентах.
Заметим, что в (2) при J 1 = J 2 = J и T 1 = T 2 = T имеем v = v 2. Тогда решение (2)-(3) сводится к решению следующих двух краевых задач:
, 2 F ( 1 + v ) , , 2 Pv ( 1 + v )
v ®-Тпи ' 1|д+П| ,= 0-
J ( 1 ' ) EJ ( 1 v )
ж»--2^ •
EJ
2 v , . 2 v 2 + v - 1 * , .
v 3 (^^-iZ^ ' 1 (Z)+ jZ^ P , v 3 ( 1 ) = -5 0 . (8)
В (7)–(8) учитываем, что v 1 – четная, а v 3 – нечетная функция по координате Z.
Рассмотрим задачу (7). Несложно построить ее решение:
v 1

+ v 2

-
J 2_ v " = 2 F 2
v ( 1 + v ) p*
1 - v
' 1 ( Z ) = P J ' -K q ( 1 - v )
ch ( q Z ) ^ sh ( q ) J ,
Частное решение полученной системы будет иметь вид:
v 1 = v 2 = vP *.
где q =
и введен параметр трения к = T / P .
Решения однородной системы (5) будем искать в виде v ( Z ) = Ci exp ( q Z ) , где Ci ( i = 1,2) — некоторые постоянные, а q находится из характеристического уравнения:
q 4 JJ 2 - q 2
4 F 2
J 1 + J 2 . 1 ' ' = 0
2 F ( 1 - v ) 1 - v ’
Видно, что в рассматриваемой задаче параметр трения возникает естественным образом как отношение двух обобщенных сил, действующих на торцах – касательной к нормальной. Заметим, что такое определение к существенно отличается от традиционного коэффициента трения f .
Из (8) найдем v 3 ( Z )
I sh(qZ) | v3 (Z) = -P|z-2vк-^l, (10)
I sh ( q ) J
Связь между нормальной силой и нормальным перемещением на границе контакта задается соотношением:
5 0 = P * (1 - 2 v k ) .
Легко проверить, что при к = 0 (случай полного отсутствия касательных напряжений) формулы (9)–(10) дают стержневое решение. Таким образом, полученные формулы позволяют оценить влияние учета трения на перемещения.
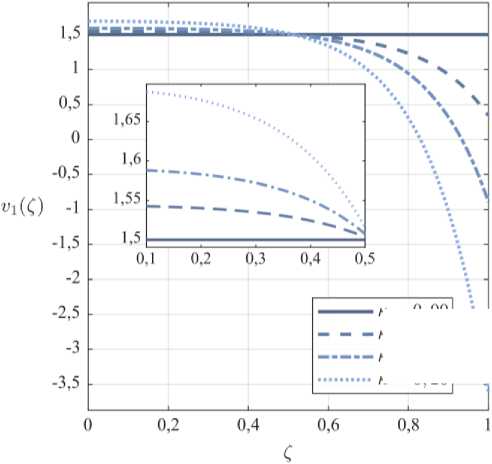
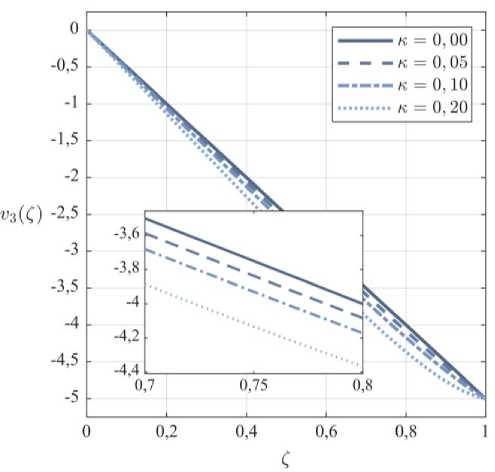
С целью проверки адекватности полученных формул и исследования влияния параметра трения на вид функций смещений по (9)–(10) были построены графики функций V j ( Z ) , v 3 ( Z ) при разных значениях параметра к . При построении графиков (рис. 1) параметры задачи были выбраны следующим образом: v = 0,3, е = 0,5, 5 0 = 0,005.
Из рис. 1 видно, что функция v 1 ( Z ) выпукла, а v 3 ( Z ) близка к линейной. Также можно отметить, что функция v 3 ( Z ) обладает большей чувствительностью к параметрам v , к , что может быть учтено при решении обратной задачи.
Обратная задача
Рассмотрим обратную задачу (ОЗ) нахождения упругих характеристик E, v и к по информации о перемещениях в двух точках Zi, Z2 на боковой поверхности образца, когда известны результирующая сила P и осевое перемещение 50 контактной поверхности. Перепишем (9)–(10) в виде:
ch ( q Z )
(1- 2 vк) f1 (Z) = v-Kq (1- v) , sh (q)
- ( 1 - 2 v к ) f 3 ( Z ) = Z- 2 v к sh^, sh ( q )
где f 1 ( Z ) = v i ( Z ) 5 01 , f 3 ( Z ) = v 3 ( Z )50 1 — известны в ОЗ.
При наличии трения ( к ^ 0 ) ОЗ сводится к решению системы двух трансцендентных уравнений, полученных из (11) относительно v и к. Решение такой системы может быть построено с помощью итерационного процесса – принципа сжимающих отображений [30; 31]. После того, как найдены v и к, E находится однозначно из формулы:
Е = P ( 1 - 2 v к )
F 5 0
Возможны два основных варианта реализации ОЗ в рамках использования принципа сжимающих отображений: 1) известны f ( Zi ) , f ( Z2 ) — обобщенные перемещения на боковой поверхности образца в двух точках; 2) известны f 1 ( Z 1 ) , f 3 ( Z 2 ) — две компоненты обобщенных перемещений в двух точках. В частности, если Z 1 =Z 2, можно решать ОЗ во втором варианте, измеряя обе компоненты перемещений в одной точке боковой поверхности. Ранее было отмечено, что f 1 ( Z )
а
Рис. 1. Функции при разных значениях параметра к : а - v 1 ( Z ) ; б - v 3 ( Z )
к = и, 00 к = 0,05 к = 0,10 к = 0,20
б
обладает большей чувствительностью к параметрам v и к по сравнению с f 3 ( Z ) , поэтому реализация постановки, где заданы f 3 ( Z 1 ) , f 3 ( Z 2 ) , не рассматривается.
Рассмотрим оператор A : X ^ R2 ^ X , где X = { x = ( v , к ) : v g ( 0,0,5 ) , KG [ 0,1 ] } . Приведем трансцендентные уравнения ОЗ к операторному виду x = Ax .
Оператор A является сжимающим на X , если Яа < 1:
||Ax 1 - Ax 2||<а|| x 1 - x 2||V x 1, x 2 g X , (13)
где α – коэффициент сжатия оператора A . Выпишем в явном виде компоненты A , A оператора A . В первом варианте ОЗ они будут иметь вид:
v = A ( v , к) =
к = A к ( v ) =
f ii +к q c 1
1 + к( qc i + 2 f ii ) ’ v - f i2
qc 2 ( 1 - v )- 2 vf i2 ’
, ch (q Z i)
где fit = fi (Zi), с^ = . Для второго варианта ОЗ sh (q)
A останется тем же, а A примет вид:
к = A K ( v ) = f 32 +Z 2 ,
7 2 v ( f 32 + S 2 )
. sh (q Z i)
где f 3i = f з (Zi), Si = , z . . Важно, что для Av сле- sh (q)
дует брать именно точку Z 1 , а для A к - Z 2 , в ином случае оператор A может вообще не оказаться сжимающим.
В случае, когда к - малый параметр ( к< 0,1 ) , для упрощения формул для A v , A к и удобства дальнейших вычислений проведем линеаризацию (11) по к
В табл. 1 приведены коэффициенты сжатия оператора A для параметров к = 0,1; v = 0,3; 8 = 0,5 при разном выборе точек измерения на боковой поверхности. α 1 – коэффициенты сжатия для первого варианта ОЗ, α 2 – для второго. По мере приближения точек друг к другу α 1 увеличивается до 0,9919, что все еще гарантирует сжимаемость, однако слабую. В свою очередь α 2 остается относительно низким, указывая на устойчивость этого варианта к выбору точек, поэтому при дальнейшем анализе приоритет будет отдаваться второй реализации ОЗ.
Таким образом, если правильно выбраны точки измерения на боковой поверхности и оператор A является сжимающим, то есть выполняется (13), то можно применить принцип сжимающих отображений к A . Тогда оператор A имеет единственную неподвижную точку x* = Ax* – это и есть решение ОЗ.
Для демонстрации эффективности предложенного итерационного алгоритма на основе принципа сжимающих отображений рассмотрим результаты численного эксперимента (рис. 2) по восстановлению коэффициента Пуассона v и параметра трения к . Данные прямой задачи генерировались по (9)-(10) при 8 = 0,5. Графики на рис. 2 иллюстрируют сходимость алгоритма при различном выборе начальных приближений.
График (рис. 2) демонстрирует сходимость итерационного алгоритма, основанного на принципе сжимающих отображений для второго варианта ОЗ, для одновременного восстановления коэффициента Пуассона v и параметра трения к . Сравниваются два сценария начальных приближений для иллюстрации устойчивости. Видно, что для обоих вариантов начальных приближений достигается хорошая точность в пределах 3–5 итераций. Это подтверждает применимость итерационного алгоритма для обработки серий экспериментальных данных из испытаний на одноосное сжатие.
f1 (Z) = v-к q (1 - v)
f 3 ( Z ) = -Z + 2 v к
, ch ( q Z ) sh ( q ) sh ( q Z )
-
2 v 2 + O ( к 2 ) ,
_ sh ( q )
-Z + O ( к 2 ) .
Из сформированной системы аналогично получим соответствующие выражения для A v , А к .
Таблица 1
Коэффициенты сжатия при разном выборе точек
|
Точки измерений на боковой поверхности |
к = 0,1; v = 0,3 |
|
|
α 1 |
α 2 |
|
|
Z 1 = 0; Z 2 = 0,9 |
0,1964 |
0,2498 |
|
Z i = 0,1; Z 2 = 0,7 |
0,7153 |
0,2407 |
|
Z i = 0,2; Z 2 = 0,5 |
0,9919 |
0,2428 |
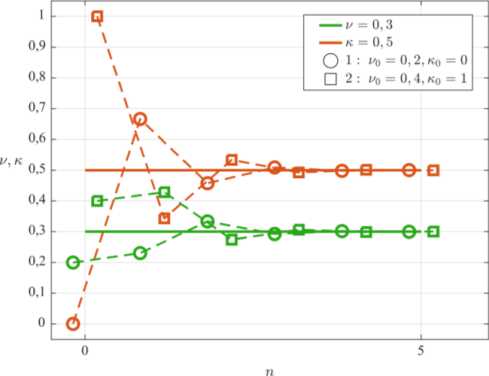
Рис. 2. Сходимость итерационного процесса при разном выборе начального приближения, n – номер итерации
Начальное приближение для v 0 рекомендуется брать из известного для материала диапазона значений либо из стержневой модели v 0 = f ,i . Параметр к 0 рекомендуется брать равным нулю или использовать некоторую априорную информацию.
Можно реализовать и другой подход в рамках второго варианта ОЗ. Он заключается в упрощении (11) с учетом малости некоторых параметров задачи. Так как q = O ( е- 1 ) , гиперболические компоненты в (11) можно
- ( 1 -Z ) c е - 1
заменить на экспоненты вида e , где c > 0 – некоторая постоянная. При учете того, что выбирается точка, близкая к нулю, еще пренебрежем экспоненциальными слагаемыми. Тогда получим линейную систему относительно v и к , из которой найдем:
к = -^1±Л1 + O e-(1-^1)cе-1 2Z1 fл ( v = -Z f11 + o(e~(1-Z1)cИ f31
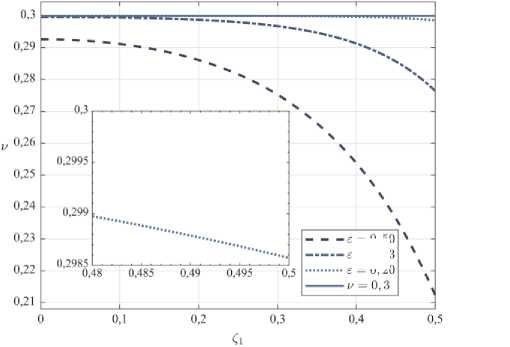
Для проверки работоспособности формул (14) проведен численный эксперимент. На рис. 3 приведены результаты восстановления точных параметров v = 0,3; к = 0,5 по формулам (14) при Zi е ( 0,0,5 ) . Видно, что работоспособность формул (14) сильно зависит от параметра относительной толщины ε. Для сильно вытянутых образцов (ε = 0,2) параметры восстанавливаются практически точно. Если ε > 0,2 , то для использования формул (14) рекомендуется выбирать точки измерения в диапазоне Zi е ( 0,0,1 ) для минимизации ошибок восстановления параметров.
Таким образом, формулы (14) позволяют приближенно восстанавливать коэффициент Пуассона v и параметр трения к по измеренным компонентам перемещений в одной точке Z 1.
Итак, построены два метода решения ОЗ в двух разных вариантах в зависимости от компонент перемещений и координат точек, в которых они измерены.
Результаты
Для оценки точности и устойчивости разработанных подходов к решению ОЗ проведен ряд численных экспериментов на основе синтетических данных, полученных из аналитических решений прямой задачи (9)– (10). В экспериментах фиксировались параметры прямой задачи: е = 0,5; 5 0 = 1; Z 1 = 0,1; Z 2 = 0,8;
E 0 = 20 МПа [8]. Далее полагаем E = EE 0\
Методы решения ОЗ обозначены следующим образом: метод 1 – итерационный алгоритм на основе принципа сжимающих отображений во второй реализации ОЗ с использованием формулы (12); метод 2 – приближенные асимптотические формулы (14) для восстановления по данным в одной точке Z 1 также с использованием формулы (12); метод 3 – классическая стержневая модель, не учитывающая трение ( к = 0 ).
Результаты восстановления при отсутствии зашумления представлены в табл. 2.
Для оценки устойчивости предложенных методов к экспериментальным погрешностям в табл. 2 введено зашумление в данные об обобщенных перемещениях, имитирующее ошибки измерений в реальных экспериментах. Шум моделировался следующим образом:
f* =(1 + Y0) fjj, где fij – известные в ОЗ обобщенные перемещения, Y 0 — независимая случайная величина, подчиняющаяся равномерному закону распределения, f j* – зашумленные данные.
- = 0,50
:' = 0,33
= = 0.20
а
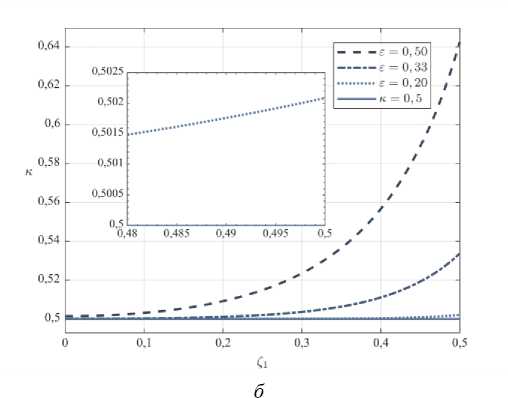
Рис. 3. Восстановление параметров по формулам (14) при разных значениях параметра е: а - v ; б - к
Таблица 2
Результаты восстановления искомых характеристик без зашумления и при наличии зашумления в 1 %
|
Исходные параметры |
Метод |
Восстановленные параметры без зашумления |
Восстановленные параметры при наличии зашумления в 1 % |
||||||
|
E* |
v |
κ |
E* |
v |
κ |
E* |
v |
κ |
|
|
1 |
0,3 |
0,1 |
1 |
1,000 |
0,300 |
0,100 |
0,995 |
0,297 |
0,109 |
|
2 |
1,001 |
0,299 |
0,099 |
1,056 |
0,284 |
0,012 |
|||
|
3 |
1,064 |
0,318 |
F |
1,064 |
0,321 |
F |
|||
|
0,5 |
1 |
1,000 |
0,300 |
0,500 |
0,995 |
0,297 |
0,511 |
||
|
2 |
1,006 |
0,294 |
0,503 |
1,061 |
0,280 |
0,460 |
|||
|
3 |
1,429 |
0,420 |
F |
1,429 |
0,424 |
F |
|||
|
0,4 |
0,2 |
1 |
1,000 |
0,400 |
0,200 |
0,995 |
0,396 |
0,207 |
|
|
2 |
1,001 |
0,399 |
0,199 |
1,057 |
0,379 |
0,148 |
|||
|
3 |
1,191 |
0,475 |
F |
1,191 |
0,480 |
F |
|||
Результаты, представленные в табл. 2, демонстрируют эффективность предложенных методов восстановления упругих характеристик (модуля Юнга E , коэффициента Пуассона v ) и параметра трения κ при осевом сжатии вытянутого призматического образца.
В табл. 2 рассмотрены случаи без зашумления в данных о перемещениях. Метод 1 обеспечивает практически точное восстановление параметров E , v и κ во всех тестовых сценариях. Метод 2 также показывает высокую точность (ошибки до 0,6 % для E , v и κ ). Метод 3, то есть классическая стержневая теория, приводит к погрешности в определении параметров порядка 5–40 % для E и v , что подтверждает необходимость учета трения.
Результаты, представленные в табл. 2, свидетельствуют что при зашумлении в 1 % метод 1 сохраняет высокую устойчивость. Метод 2 демонстрирует большую чувствительность к шуму, но все равно превосходит метод 3, где ошибки практически аналогичны случаю без зашумления. Это подчеркивает применимость итерационного подхода для реальных экспериментов с биоматериалами, где шум, связанный с ошибками измерений, неизбежен.
В реальных лабораторных испытаниях на одноосное сжатие призматических образцов, особенно биоматериалов (таких как трабекулярная кость) и композитов, контактное трение играет ключевую роль, приводя к неоднородным полям деформаций и бочкообразной форме образца, как предсказано в представленной модели. Для точного учета этих эффектов широко применяется метод цифровой корреляции изображений ( Digital Image Correlation – DIC ), позволяющий бесконтактно измерять трехмерные поля перемещений и деформаций на поверхности образца с высокой разрешающей способностью [32]. Интеграция DIC с представленной моделью перспективна: экспериментальные данные о перемещениях на боковой поверхности могут являться входными данными для ОЗ. Возможность совместного использования DIC и предложенных методов требует дальнейших исследований.
Заключение
Таким образом, предложенная аналитическая модель учета контактного трения при осевом сжатии упругого вытянутого призматического образца представляет собой эффективный инструмент для обработки данных экспериментов. Она позволяет решать обратные задачи по восстановлению трех параметров ( E , v и κ ) для ограниченного набора входных данных. Предложенный для решения ОЗ итерационный алгоритм на основе принципа сжимающих отображений демонстрирует высокую точность и устойчивость к шуму. В свою очередь, представленные аппроксимационные формулы могут служить хорошим начальным приближением для итерационного алгоритма или инструментом для предварительной оценки упругих характеристик. Для более точного восстановления с использованием представленных методов рекомендуется проводить испытания на образцах с ε = 0,2.
Перспективы развития модели включают: учет анизотропии и пористости; экспериментальную верификацию на реальных образцах с применением DIC . Дополнительно значимым направлением является расширение модели в сторону микромеханических описаний контактного взаимодействия: введение параметров адгезии, модели разделения поверхностей с учётом микрошероховатости, а также многоуровневых схем, связывающих локальные механизмы сцепления с эффективным параметром трения. Эти направления позволят расширить применимость модели к более широкому классу образцов.
