О задаче гашения поперечных колебаний продольно движущейся струны

Автор: Муравей Леонид Андреевич, Петров Виктор Михайлович, Романенков Александр Михайлович
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Физико-математические науки
Статья в выпуске: 4, 2018 года.
Бесплатный доступ
Введение. Рассматриваемая задача гашения поперечных колебаний продольно движущейся струны актуальна для производственных процессов, связанных с продольным движением материалов (например, бумажного полотна). Для данных процессов крайне нежелательными являются поперечные возмущения, которые в вертикальном сечении описываются гиперболическим уравнением продольно движущейся струны. Вследствие этого возникает задача гашения колебаний за конечное время. Материалы и методы. Для решения задачи гашения колебаний в статье производится ее сведение к тригонометрической проблеме моментов на произвольном временном отрезке. При рассмотрении движущихся материалов построение базисных систем, образующих проблему моментов, является отдельной задачей, поскольку гиперболическое уравнение содержит смешанную производную (кориолисово ускорение). По этой причине в данном случае неприменим классический метод разделения переменных. Вместо него был использован новый метод нахождения автомодельных решений нестационарных уравнений, что позволяет найти базисные системы в явном виде. Результаты исследования. В случае с бумажным полотном находится минимальный во всем классе допустимых возмущений временной отрезок, на котором образующая проблему моментов тригонометрическая система является базисом Рисса. Это позволяет с использованием сопряженной ей системы найти соответствующее минимальному времени гашения колебаний оптимальное управление (в виде ряда) и построить так называемый оптимальный демпфер. Обсуждение и заключение. В результате исследования было построено обобщенное решение задачи гашения поперечных колебаний. Получено точное время гашения, а именно такое время T0, при котором полная энергия системы равна нулю. Найдено оптимальное управление в виде ряда Фурье.
Гашение колебаний, гиперболическое уравнение, кориолисово ускорение, тригонометрическая проблема моментов, базис рисса
Короткий адрес: https://sciup.org/147220593
IDR: 147220593 | УДК: 534.112 | DOI: 10.15507/0236-2910.028.201804.472-485
The problem of damping the transverse oscillations on a longitudinally moving string
Introduction. The problem under consideration is relevant to production processes associated with the longitudinal movement of materials, for example, for producing paper webs. For these processes transverse disturbances, which in the vertical section are described by the hyperbolic equation of a longitudinally moving string, are extremely undesirable. That gives the problem of damping these oscillations within a finite time. Materials and Methods. To solve the problem of damping the oscillations, the authors suggest reducing it to the trigonometric problem of the moments at an arbitrary time interval. When considering moving materials, the construction of the basis systems forming the moment problem is a special challenge, since the hyperbolic equation contains a mixed derivative (Coriolis acceleration). Therefore, the classical method of separating variables is not applicable in this case. Instead, a new method is used to find self-similar solutions of non-stationary equations, which makes it possible to find the basis systems explicitly. Results. In the case of paper web, it is necessary to find a minimal in the whole class of admissible perturbations time interval, within which the trigonometric system forming the problem of moments is the Riesz basis, that make it possible through using the system conjugate with it to find the optimal control way in the form of a series and, therefore, to build a so-called optimal damper. Conclusions. As a result of the study, a generalized solution of the problem of transverse oscillations is constructed. For the problem of damping oscillations, the exact damping time is obtained, namely, a time T0 at which the total energy of the system is zero. Optimum control is found in the form of a Fourier series.
Текст научной статьи О задаче гашения поперечных колебаний продольно движущейся струны
Особенностью задач гашения колебаний гиперболических систем является то, что в них оптимальный режим зависит не только от времени, но и от пространственных переменных. Поэтому для нахождения минимального времени гашения колебаний и соответствующего ему оптимального уравнения используется метод сведения этой задачи к т. н. тригонометрической проблеме моментов. Наиболее значимой работой в этом направлении является статья Дж. Лагнеса [1], где, в частности, исследована возможность гашения колебаний закрепленной струны:
2 W a
- w xx + q ( x ) w = g ( x,1 ) ,
v < x < l, t > 0,
"'■=o = hо (x), "' ■=o = h (x), 0 < x < l,
4=0=4=l=0, t >0, где начальные данные h0(x) и h 1(x) - начальные возмущения, g(x, t) – функция управления; при этом предполагается, что потенциал q(x) – непрерывная неотрицательная функция на отрезке [0, l]. Решение смешанной задачи рассмотрено как обобщенное [2], для которого определен интеграл энергии:
l
E ( t ) = / [ w ( x ’ t )+ a 2 ( w 2 ( x ’ t )+ q ( x ) w 2 ( x ’ 1 ) ) ] dx ’
который при g ( x, t ) = 0 не зависит от t и равен значению E (0). Задача управления системой (1)‒(3) заключается в возможности ее перевода из начального состояния (2) в произвольное:
11'.= T = Ко ( x ) , ^ J , = T = К ( x ) , x G [ 0, l ] , (5)
где h 0 И 0 e W 1 ( 0, l ) , h , \ e L 2 ( 0, l ) и T > 0 за счет выбора управляющей функции g ( x , t ) e L 2. Вслед за Ж. Лионсом [3] ученые называют такую ситуацию строгой управляемостью.
Задача гашения колебаний заключается в нахождении минимального значения T 0 > 0, при котором для любых начальных возмущений h 0 е W 11 ( 0, l ) , h 1 е L 2 ( 0, l ) найдется управляющая функция g 0 ( x , t ) e L 2 ( 0 < x < l , 0 < t < T0 ) (определяющая оптимальный режим) такая, что
E ( T o ) = 0, (6)
или, говоря другими словами, при g ( x, t ) = g 0 ( x, t ) решение задачи (1)-(3) при T = T0 принимает вид:
w| = 0, w = 0 . (7)
1 = T0 , t t = 0
Из закона сохранения энергии (4) следует, что решение граничной задачи при (1), (3) и g ( x , t ) = 0 представляет собой т. н. «стоячие волны», которые можно найти методом разделения переменных, или методом Фурье. Они представляются в виде:
z n ( x , t ) = ( A n cos ® n t + B n sin ® n t)v n ( x ) , (8)
где vn ( x ) (решения соответствующей спектральной задачи)
-v"(x) + q (x) v (x) = Xv (x), 0 < x < 1, v (0) = v (l ) = 0 (9)
образуют ортонормированный базис в L 2 ( 0, l ) и являются собственными функциями задачи (9), отвечающими собственным значениям X n , n = 1,2, ^ При этом 0 < Х 1 < Х 2 <^< Х п < ^ образуют монотонно возрастающую последовательность, и для них справедливо асимптотическое разложение:
Гл ann , 1 ]
to n = a JXn = —— + cn + O I - I , n ^w . (10) l V n )
Выполнение условий (7) для построенной методом разделения переменных смешанной задачи (1)-(3) приводит к системе интегральных уравнений Фредгольма первого рода:
[ V ( t ) cos tontdt = -p n ,
J T n = 1,2, ^ , (11)
J ^un (t) sin totdt = anrnn, которую принято называть тригонометрической проблемой моментов. Здесь an, Pn, un (t) _ коэффициенты разложения функций h0 (x), h( x) и g (x, t) по ортонормированному базису {vn (x)}.
Таким образом, решение задачи гашения колебаний сведено к нахождению минимального значения времени T 0 разрешимости бесконечной системы (11), т. е. существования решения u 0 ( t ) , ^ , и П0 ( t ) этой системы в пространстве L 2 ( 0, T ) , для которого справедлива оценка:
а
X u0 ( t ) ^ 2 ( V , l ) < const ( h o W 1 ( 0,1 ) + h L 2 ( 0, l ) ) ^ j = 0
< const E ( 0 ) . (12)
Заметим, что из (10) вытекает существование предела lim n= l.(13)
n → N ω n απ
Поэтому, согласно результатам, полученным Н. Левинсоном [4], при l T2
— = ——, т. е. при Т0 = — система {cosront, sin ront} образует базис Рисса в L2 (0, T0). Следовательно, для нее существует биортогональная система в L2 (0, T0), что позволяет установить существование единственного решения {и{0) (t)} системы (11), а также найти оптимальное управление g0 (x, t) в виде ряда продольно движущейся струны, возникающей в производстве бумажного полотна. Исследования поперечных колебаний продольно движущейся струны начались около 60 лет назад [2; 5–6]). Была предложена следующая модель поперечных колебаний w (x, t), связанных с движением бумажного полотна (см. рисунок) [7].
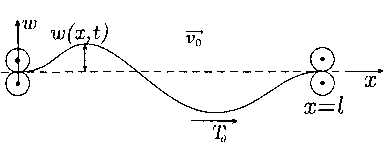
Р и с у н о к. Форма движущегося бумажного полотна
F i g u r e. Shape of moving paper web
w g0 (x, t^^un, (tX (x). (15)
n = 1
Отметим, что результаты, полученные Дж. Лагнесом [1], имеют важное значение, поскольку из них вытекает гарантированное время гашения колебаний. Показано, что управляющую функцию можно использовать и в любой подобласти [ c , d ] отрезка [0, l ], который на практике может иметь достаточно большую длину l . Однако приближенное оптимальное управление построить весьма затруднительно, т. к. приходится решать бесконечную систему интегральных уравнений для сопряженных функций и суммировать бесконечный ряд (15) в ситуации, когда его оценка стремится к бесконечности для ( d - c ) ^ 0.
Поэтому все дальнейшие работы для (приближенного) решения задачи гашения колебаний, обзор которых будет сделан ниже, основаны на существенном сужении класса управляющих функций, причем в них рассматриваются не только струны, но и мембраны, балки и пластины.
Целью работы является решение задачи гашения поперечных колебаний
Physics and mathematics
Здесь _ г 0 - вектор продольной скорости, Т0 - вектор продольной силы на единицу длины, m ‒ масса единицы длины:
Id w _ d w 2 m + 2 vn---- + vn
I d t 2 0 d x d t 0
d 2 w d x 2
—
T ^ w = 0 .
0 d x 2
Поэтому, приняв

можно
привести данное уравнение к виду:
d2w dt2 + 2 v0
5 2 w
+ 5 x 5 t
v o2 - c
d 2 w dx 2
0 < x < l , t > 0.
При этом заданы граничные условия
w ( 0, t ) = w ( l , t ) = 0, t > 0 (17)
и начальные возмущения:
w ( x, 0 ) = h о ( x ) , W t ( x, 0 ) = h ( x ) , x e [ 0; l ] . (18)
Для решения смешанной задачи справедлив аналогичный случаю закрепленной струны закон сохранения энергии:
l
E ( t ) = j [ w 2 ( x, t ) + ( c 2 — v 0 ) w 2 ( x, t ) ] dx - E ( 0 ) =
l
= J [ h ( x ) + ( c 2 - v 0 ) (h о ( x ) )2 ] dx . (19)
Таким образом, кориолисово ускорение 2 v 0 wxt не вносит вклад в энергию системы, и в ней должно существовать решение в виде стоячих волн. Но из-за наличия члена 2 v 0 wxt их невозможно найти традиционным методом разделе-
ния переменных.
Тем не менее данные функции най-
дены с использованием специальных
функций и образуют систему решений
I , ikn 2 2 I vk (x, t) = exp j ±——1_ v0 — c J t — v0 x ^, k = 1,2,™
—
В работах Л. А. Муравья и Б. Т Билалова1-2 [8] при естественном пред-
условий оптимизации градиентного спуска.
Обзор литературы
Как уже было отмечено, исследования, посвященные гашению колебаний упругих систем, различаются как управляемыми объектами, так и классами управляющих функций, часто называемыми демпферами.
Начнем обзор с работ, посвященных задаче гашения колебаний струны. В 1978 г. Дж. Расселл [4] предложил использовать только одну управляющую функцию (т. н. распределенный демпфер):
g ( x, t ) = u ( t ) f ( x ) , 0 < x < l, t > 0, (20) где f ( x ) - некоторая заданная функция. Тогда проблему моментов (11) при ( q ( x ) = 0 ) можно записать в виде:
положении v 0 < c показано, что система { v k ( x , 0 )} образует базис Рисса в L 2 ( - l, l ) . Это позволяет построить обобщенное решение смешанной задачи (16)‒(18) с управляющей функцией g ( x, t ) е L 2(0 < x < l , 0 < t < T ) .
Доказано, что при тригонометрическая
lc
T0 2 12
n ( c - v 0 ) проблема мо-
T ncmt i nan
I e l u ( t ) dt = - P n + 1 ——« „ , 0
n = 1,2, ™ , (21)
где
. f n = ^2 J. f ( x ) sin ^ Ondx
ментов, вытекающая из условия E ( T0 ) = 0, имеет единственное решение: { u ° ( t ) , ™ , u k ( t ) , ™ } в L 2 [ 0, T0 ] .
Исследованы различные классы управляющих функций для построения приближенного решения, которые позволяют установить необходимые условия оптимальности или получить численное решение задачи гашения колебаний, используя методы
должны быть ≠ 0.
Видно, что при T 0 = — система экс
понент 1
ann i elt
a образует ортогональ-
ный базис в комплексном пространстве L 2 ( 0, T0 ) , и функция оптимального управления u 0 ( t ) представляется в виде:
-
1 Muravey L. A. On the suppression on membrane oscillations // Dynamical Problems of RigidElastic System : Summaries of IUTAM Symposium. Moscow, 1990. P. 50–51.
-
2 Билалов Б. Т., Муравей Л. А. О гашении колебаний больших механических систем // Интеллектуальные системы : тр. 2-го междунар. симпоз. «Интелс-96». М. : РУДН, 1996. С. 246–254. 476 Физико-математические науки
го nant u0 ( t ) = ReTe ' 1
n = 1
- P n
. nan 1
+ i I a n
„ l V . (23)
f n
Заметим, что, если f ( x ) e L 2 ( 0, l ) , то в силу равенства Парсеваля fn ^ 0, n →∞. Значит, ряд (23) не сходится в L 2 ( 0, T 0 ) , и, таким образом, оптимальное решение w ( x , t ) задачи (1)-(9) при f n ^ 0, n ^ го не принадлежит энергетическому пространству (для него не определен интеграл энергии).
Если принять / „ = 1 , то получим, что:
ность оптимального уравнения u 0( t ) пространству L 2(0, T 0) требует значительной гладкости начальных возмущений h 0( x ) и h 1 ( x ).
Основными в работах авторов являются т. н. «точечные движущиеся демп-феры»3, а именно уравнения вида:
g ( x, t ) = u ( t ) 5 ( x - x 0 - 5 ( t )) . (26)
2 . nnx е .
•f (x) = тЕsin / = 5(x), (24) l n=1 l где 5 (x)- дельта функции Дирака. Далее приходим к исследованию проблемы моментов для управлений вида:
g ( x, t ) = u ( t ) 5 ( x - x 0 ) , x 0 e ( 0, l ) (25)
t
Здесь x 0 e ( 0, l ) , а s ( t ) = jv ( t ' ) dt ', где v ( t ) - функция ограниченной вариации на отрезке [0, T ]. Таким образом, имеем две управляющие функции u ( t ) e L 2 ( 0, T ) и v ( t ) е V [ 0, T ] (т. е. для любого разбиения 0 < 1 0 < t 1 <^< t n = T отрезка [ 0, T ] ^ ^ ( L ) -v ( t j - 1 )| < const ).
j = 1
Заметим, что введение точечных движущихся демпферов вполне естест-
(т. н. неподвижные точечные демпферы).
Исследованию проблемы момен-
тов для случая неподвижных точечных демпферов посвящен ряд работ А. Г. Бутковского [10]. Из них, в част- Г fП П )
ности, следует, что для fn = sin I — x0 I точки x0 = —, k, n = 1,2,_, k < n обра-nl
венно, поскольку множество точек неуправляемости системы имеет лебе-говскую меру нуль на [0, T ], а значит, введение второй управляющей функции v ( t ) позволяет почти всем t e [ 0, T ] находиться в точках управляемости, и тем самым избежать появления неже-
лательных стоячих волн.
Проблема моментов для простейшего демпфера вида (26), а именно
x 0 = 0 и 5 ( t ) = bt , 0 < t
зуют множество точек неуправляемости системы (1)-(3). В этом случае возникают решения соответствующей однородной системы в виде стоячих волн типа (8), энергия которых постоян-
и s
( t )= » - t •
l 2 1
b t b ,
на и отлична от нуля, причем множество точек неуправляемости плотно на всем отрезке [0, l ]. Это затрудняет построение устойчивых алгоритмов численного (приближенного) решения задачи гашения колебаний в точках управляемости системы. При этом принадлеж-
где b = const > a , исследована Б. Т. Билаловым и соавторами4 [7]. В частности, было показано, что возникающие в случае простейшего демпфера тригонометрические системы
ei
n ant
l sin

-
3 Muravey L. A. On the suppression on membrane oscillations // Dynamical Problems of RigidElastic System : Summaries of IUTAM Symposium. Moscow, 1990. P. 50–51.
-
4 Там же.
^.
образуют базис Рисса в L7 ( 0, T ) , где 2 l 2
T = —. Значит, время гашения колебаний точечным движущимся демпфером меньше времени гашения колебаний, полученного Дж. Лагнесом.
Использование точечного движущегося демпфера (26) при ограничениях a < c < x 0 + 5 ( t ) < d < b позволило разработать эффективные численные методы гашения колебаний струн, круглых и прямоугольных мембран [11–13], а также балок и прямоугольных пластин5 [14]. Более подробный обзор результатов по этой теме содержится в монографии авторов статьи [15].
Ряд работ В. И. Ильина и В. М. Моисеева [16–18] посвящен граничному уравнению колебаний струны.
Материалы и методы
Построение обобщенного решения задачи поперечных колебаний продольно движущейся струны
Сначала рассмотрим уравнение (16) для всех x е ( -да , + да ) и t > 0. При естественном ограничении c > v 0 решение x = ф ( t ) уравнения характеристик для (16) имеет вид:
( ф ')2 - 2 v о ^+ v 02 - c 2 = 0 , (28) откуда следует, что ^ '( t ) = v 0 ± c , и характеристики уравнения (16) имеют вид:
^ = x - ( v 0 + c ) t , п = x + ( c - v 0 ) t . (29)
Общее решение уравнения (1) имеет вид:
w ( x, t ) = f ( x-(v 0 + c ) t ) + g ( x + ( c - v0 ) t ) , (30)
где f , g – произвольные функции из C2 , ( 0 < x <+® , t > 0 ) .
Том 28, № 4. 2018
Следует отметить, что представление (30) позволяет решить задачу Коши и особенно эффективно при численных решениях смешанной задачи (1)-(3) методом характеристик.
Для решения w ( x , t ) смешанной задачи (16)-(18) обычным приемом [13] устанавливается закон сохранения энергии:
l
E ( t ) = J [ w 2 t ( x , t ) + ( c 2 - v o ) w 2 x ( x , t ) ] dx = E ( 0 ) = o
l
= J[h (x) + (c2 - vо )(hо (x))2]dx, (31) о поэтому естественно искать решения смешанной задачи из соответствующего энергетического пространства [13]. При этом для вывода проблемы моментов требуется найти его решение в виде ряда стоячих волн. Заметим, что исследованию стоячих волн задачи (1)–(2) посвящено достаточно большое количество работ, в частности, Н. В. Бани-чука и соавторами [7]. Кроме того, целый ряд исследований (например, [19]) посвящен изучению стоячих волн приближенного уравнения (16).
Для вывода проблемы моментов необходимо найти такую систему стоячих волн v k ( x, t ) , k = 1,2, ^ , чтобы система { vk ( x ,0 )} ” ч была базисом Рисса в L 2 ( - 1 , l ) . Для этого сначала нужно найти комплексные решения задачи (16)–(17):
v ( x , t ) = exp { ± i a ( v 02 - c 2 ) p t - v 0 y x } sin ( a x ) .
Непосредственно проверяется, что уравнение (16) выполняется при α > 0
и Y = в = , а граничные условия (2) - c kn при a = ak = —, k = 1,2,^
Таким образом, мы получим систему функций
Y = в = 1 , c
задающих все решения задачи (10), (15). Из (33) при t = 0 выведем систему
. v 0 ( k n x ^ , \
± i I I
V k ( x ) = e c I l ^ sin I —1 , k = 1,2, ^ , (34)
которая исследована в работах Б. Т. Билалова и Л. А. Муравья6 [8]. Отсюда, в частности, следует, что при v0 < c эта система в виде to
Ea2 < consthо (x)42(0,l), k=1
to
ZX < consth(x)\(о,i), k=1
to
E a2 k 2< consth0) ( x ) 4 ( - 1 , i ) . k = 1
Теперь введем функцию управления g ( x , t ) e £ ( Пт ) , где Пт = { 0 < x < l , 0 < t < T } ; представим решение смешанной задачи для уравнения:
W + 2 v 0 w x + ( v 02 - c 2 ) w x = g ( x , t ) ,
{ У к ( x ) , z k ( x ) } =
0 < x < l , 0 < t < T
(knv V knx . (knvn 1 . knx cos 0x sin ,sin 0x sin
I 1c J 1 I 1c J I образует базис Рисса в пространстве L2 (-1, l).
Следовательно, решение w0(x, t) смешанной задачи (16)-(18) из энергетического пространства определяется единственным образом в виде ряда с граничными условиями (17) и начальными условиями (18) в виде w = w0 + wg, где
t wg (x, t) = JW(x, t -т, т)dT, (39)
где w(x, t - т, т) является решением смешанной задачи при начальных условиях to wo (x, t )=E k=1
а к У к ( x ) cos
k
k n ( c 2 - v 02 ) lc
) t
+
AV 1 1 = T = 0, AV 1 1 = T = g ( x , T ) . (40)
+ P k
clzk ( x ) . k n ( c 2 - v 02 )
k sint kn ( c2 - v02) lc
Таким образом,
, (36)
, 4 ” zk (x) cl w. (x, t )=x t; 2 21x k=1 kn (c - v0 )
где ak - коэффициенты Фурье продолженной нечетным образом на [- l , 0] функции h 0 ( x ) е W 1 ( 0, l ) ; вк — коэффициенты Фурье продолженной четным образом на (- 1 , 0) функции h 1 ( x ) е L 2 ( 0, l ) по системе [ yk ( x ) , zk ( x ) ], биортогональной рассматриваемой системе { Z k ( x ) , nk ( x )} • При этом справедливы оценки
t x^uk (t ) sin
kn(c - v0) — lc
V
)
( t - t ) d T , (41)
J где uk – коэффициенты разложения функции g(x, t), продолженной четно по x на отрезок [-l, 0], по системе {zk(x)}.
Результаты исследования
Решение задачи гашения поперечных колебаний продольно движущейся струны заключается в нахождении такого минимального значения времени t = T 0 , при котором для любых допустимых начальных возмущений h 0 ( x ) е W 0 ( 0, l ) , h 1 ( x ) e L 2 ( 0, l ) найдется такое оптимальное управление g 0 ( x , t ) e L 2 ( 0 < x < l , 0 < t < T0 ) , что в момент времени t = T 0 для решения w ( x , t ) = w 0 ( x , t ) + wg ( x , t ) смешанной задачи выполняются равенства
W ( x , T o ) = 0, W ( x , T o ) = 0, x G [ 0, l ] , (42)
т. е. энергия системы в момент времени t = T 0 обращается в 0. Из представлений (36), (41) с помощью стандартных преобразований находим следующую систему интегральных уравнений первого рода:
lim A = _Jc -- . (45)
k ^” ^ n (c 2 - V a :) k 0
Таким образом, из результатов
-
Н. Левинсона [4] следует, что система lc T
-
(44) при —------- - = —0 , т. е. при
п ( c — v о ) 2 п
To = T^lc-2 , (46)
( c - v o )
образует базис Рисса на отрезке [0, T 0 ]. Следовательно, для нее в L 2(0, T 0) существует биортогональная система { Ф к ( t ) , V k ( t ) }• А значит, существует решение проблемы моментов:
uk (t) = Pk9k (t)- ам.у (t), t e[0, To], к = 1,2,^ (47)
T
U ( t ) cos 0
z k n ( c 2 -
1c k
-2 ) )
011 dt = - P k ,
T j uk ( t ) sin 0
k n ( c 2 - v o2 )
1c
k
^
t
kn ( c 2 - dt = ak —----
v 0 2
k = 1,2,_, (43)
называемую проблемой моментов относительно тригонометрической системы
Таким образом, вызываемые начальными возмущениями h0(x) и h 1(x) колебания w(x, t) можно погасить за минимальное время T0, не зависящее от h0(x) и h 1(x), для всех допустимых возмущений. При этом оптимальное управление g0(x, t) представляется в виде сходящегося в L2 (ПТо) ряда го gо (x, t) = Tu° (t) zk (x) (48)
k = 1
^ cos
k n ( c - v 0 )
Tc
V
^ t
/
,sin
k n ( c - v 0 )
Tc
V
' 1; ■
k = 0,1, _ (44)
на отрезке [0, T ]. Приняв юк = получим, что
kn ( c 2 - v 00 ) lc
и удовлетворяет оценке g0 (x, t)2,(To) ^ const(ho (x)L2(0,l) + (hh (x)L2(0,l))•
Следует отметить, что найденное
T 0 должно удовлетворять неравенству
T 0 и 0< l , которое выполняется при дополнительном ограничении на и 0
и 0 < ( V2 - 1 ) c . (50)
О классах управляющих функций
Заметим, что в случае и 0 = 0 время гашения колебаний совпадает со временем гашения колебаний закрепленной струны, установленным Дж. Лаг-несом [1]. Исследователь показал, что за это же время можно погасить колебания струны, если управление g ( x , t ) сосредоточено на произвольном отрезке [ у , 5 ] с [ 0, l ] , т. е. при g ( x , t ) g L 2 ^ у < x < 5 ,0 < t < T о ^, где ' 2 1
Tо = . Аналогичный результат спра-c ведлив и в рассматриваемом случае. Действительно, если g (x, t)e L2 (Пт) и supxg (x, t )G[ Y, 5], то вместо проблемы моментов (43) получим проблему моментов
T o 5
jj g 0 ( x , t ) cosa>ntdxdt = - Д ,,
<
;; n = 1,2, ^ (51)
T o 5
jj g o ( x , t ) sinto„tdxdt = an to „ ,
. 0 у
В этом случае искомое решение g 0( x , t ) системы (51) имеет вид:
to g о (x, t)=Z(42®„a„y„ (x M (t)- Bn Pnzn (x ))• n=1
X [ a, в ]( x ) ’ где X[Y,s] (x) - характеристическая функция отрезка [у, 8],
(5 У1 (8У
A n = y x ( ( x ) dx , B n = z2 ( ( x ) dx ,
IY J IYJ n = 1,2,^
При этом /и/^2 > const (5 - у) и, аналогично, infBn > const (8 - у).
Следовательно, построенное оптимальное управление g0(x, t) удовлетворяет оценке g о (x, t )L 2
< const
8 - y
(hn (x)2Z A+ h,(x)2.
0 L 2 ( 0, l ) 1 L 2 ( 0, l )
В данной статье будем предполагать, что управляющая функция g ( x , t ) имеет вид:
k = 1
где 0 < x 1 <^< x k < l , а x k ( x ) — характеристическая функция на отрезке [ x k - e , x k + e ], при этом e > 0 достаточно мало, так что все указанные отрезки не пересекаются и принадлежат отрезку [0, l ]. Дополнительная информация представлена в работах А. Макмудова и Л. А. Муравья7 [20].
Введем минимизируемый функционал:
l
J ( t ) = E ( t ) + X J g 2 ( x, t ) dx =
l
= J [ w 2 ( x, t ) + ( c 2 — v 0 ) w X ( x, t ) ] dx +
K
+ 2 Xs ^ u 2 ( t ) . (57)
k = 1
Примем 2 Xe = ц и будем считать функции uk ( t ) кусочно-постоянными:
uk ( t ) = u kp , при t p -i < t < t p , P = 1, 2, ... , P (58)
Здесь P может принимать значения от 1 до N, где N - число шагов по вре- мени, используемых при численном решении задачи.
Таким образом, функционал J становится функцией значений ukp , и для применения градиентного метода требуется значение всех частных произ-
5J — — водных----, к = 1, K, p = 1, P. d и,п xp
Обсуждение и заключение
В статье получено обобщенное решение уравнения движения бумажного полотна; с помощью стандартного приема установлен закон сохранения энергии колебаний. Показано, что возникающая система собственных функций I (knv V knx . kknv V knx I cos 0x sin ,sin 0x sin
[ ( Ic ) l ( Ic ) l образует базис Рисса в соответствую-
Том 28, № 4. 2018
щем функциональном пространстве, что позволило установить минимальное время гашения колебаний и явно выписать управляющую функцию, которая гасит эти колебания. Также описан класс управляющих функций; показана возможность применения градиентного метода для поиска минимума функционала энергии. Такой метод численной оптимизации будет рассмотрен в дальнейших работах, где будут также установлены необходимые условия оптимальности в форме принципа максимума Л. С. Понтрягина (аналогично тому, как это сделано в статье А. А. Гурченкова и соавторами [21]) и приведены графические иллюстрации оптимальных режимов и процесса гашения колебаний.
Поступила 19.06.2018; принята к публикации 15.08.2018; опубликована онлайн 28.12.2018
Об авторах:
Все авторы прочитали и одобрили окончательный вариант рукописи.
Список литературы О задаче гашения поперечных колебаний продольно движущейся струны
- Lagnesе J. Control of wave process with distributed controls supported on a subregion // SIAM Journal of Control and Optimization. 1983. Vol. 21, Issue 1. P. 68-85. DOI: 10.1137/0321004
- Archibald F. R., Emslie A. G. The vibration of a string having a uniform motion along its length // Journal of Applied Mechanics. 1958. Vol. 25, Issue 1. P. 347-348.
- Lions J. L. Exact controllability, stabilization and perturbations for distributed systems // SIAM Review. 1988. Vol. 30, Issue 1. P. 1-68. DOI: 10.1137/1030001
- Levinson N. Gap and density theorem // Colloquium Publications. 1940. Vol. 26. 246 p. DOI: 10.1090/coll/026
- Mahalingam S. Transverse vibrations of power transmission chains // British Journal of Applied Physics. 1957. Vol. 8, no. 4. P. 145-148. URL: http://iopscience.iop.org/article//pdf DOI: 10.1088/0508-3443/8/4/303
- Sack R. A. Transverse oscillations in traveling strings // British Journal of Applied Physics. 1954. Vol. 5, no. 6. P. 224-226.
- DOI: 10.1088/0508-3443/5/6/307
- Mechanics of moving materials / N. Banichuk [et al.]. Switzerland: Springer, 2014. 207 p.
- DOI: 10.1007/978-3-319-01745-7
- Билалов Б. Т. О базисности системы {eiα nxsin(nx)} экспонент со сдвигом // Доклады Академии наук. 1995. Т. 345, № 2. С. 644-647.
- Russell D. L. Controllability and stabilizability theory for linear partial differential equations: recent progress and open questions // SIAM Review. 1978. Vol. 20, no. 4. P. 639-739.
- DOI: 10.1137/1020095
- Бутковский А. Г. Методы управления системами с распределенными параметрами: монография. М.: Наука, 1975. 568 с. URL: https://www.twirpx.com/file/34383
- Асланов С. Ж., Михайлов И. Е., Муравей Л. А. Аналитические и численные методы в задаче гашения колебаний струны точечным демпфером // Мехатроника, автоматизация, управление. 2006. № 7. С. 28-35.
- Асланов С. Ж., Михайлов И. Е., Муравей Л. А. О гашении колебаний круглой мембраны с помощью кольцевого демпфера // Труды ИСА РАН. 2007. Т. 29 (1), № 11. С. 54-59.
- Михайлов В. П. Дифференциальные уравнения в частных производных: монография. М.: Наука, 1983. 424 с.
- Атамуратов A. Ж., Михайлов И. Е., Муравей Л. А. Проблема моментов в задачах управления упругими динамическими системами // Мехатроника, автоматизация, управление. 2016. Т. 17, № 9. С. 587-598.
- DOI: 10.17587/mau.17.587-598
- Муравей Л. А., Романенков А. М., Петров В. М. Оптимальное управление нелинейными процессами в задачах математической физики: монография. М.: Изд-во МАИ, 2018. 159 с.
- Il'in V. A., Moiseev E. I. Optimization of the boundary control by shift or elastic force at one end of string in a sufficiently long arbitrary time // Automation and Remote Control. 2008. Vol. 69, Issue 3. P. 354-362.
- DOI: 10.1134/S0005117908030028
- Ильин В. А., Моисеев Е. И. Граничное управление колебаниями струны, минимизирующее интеграл от степени p ≥ 1 модуля управления или его производной // Автоматика и телемеханика. 2007. Т. 68, № 2. С. 313-319.
- DOI: 10.1134/S0005117907020117
- Ильин В. А., Моисеев Е. И. Оптимизация граничных управлений колебаниями струны // Успехи математических наук. 2005. Т. 60, вып. 6. С. 89-114.
- DOI: 10.4213/rm1678
- Malookani R. A., van Horssen W. T. On the vibrations of an axially moving string with a time-dependent velocity // Proceedings of the ASME 2015 International Mechanical Engineering Congress and Exposition. ASME, 2015. Vol. 4B: Dynamics, Vibration, and Control. P. V04BT04A061.
- DOI: 10.1115/IMECE2015-50452
- Муравей Л. А. Задача управления границей для эллиптических уравнений // Вестник МГУ (Сер. 15 «Вычислительная математика и кибернетика»). 1998. № 3. С. 7-13.
- Гурченков А. А., Муравей Л. А., Романенков А. М. Моделирование и оптимизация технологического процесса ионно-лучевого травления // Инженерный журнал: наука и инновации. 2014. № 2 (26).
- DOI: 10.18698/2308-6033-2014-2-1211
