О задаче стационарного поворота автопоездов

Автор: Нарадовый Д.И., Позин Б.М., Трояновская И.П.
Рубрика: Расчет и конструирование
Статья в выпуске: 14 (54), 2005 года.
Бесплатный доступ
Рассмотрен подход к составлению модели стационарного поворота автопоезда, основанный на взаимодействии опорных площадок контакта с грунтом как фрикционной пары трения с постоянным или переменным коэффициентом.
Короткий адрес: https://sciup.org/147151366
IDR: 147151366 | УДК: 629.114.3
Текст научной статьи О задаче стационарного поворота автопоездов
Тракторные и автомобильные поезда (в дальнейшем автопоезда) получили широкое применение на транспортных работах в сельскохозяйственном производстве и других отраслях народного хозяйства. Особое значение приобретают автопоезда в связи с появлением длинномерных и разного рода тяжелых негабаритных грузов, с всё возрастающим объёмом междугородних и международных автомобильных перевозок.
Автопоезд, как правило, состоит из последовательно соединенных двух и более транспортных единиц, одна из которых играет роль тягача, а другие выступают в качестве прицепов (рис. 1). Появившиеся в последнее время многоопорные тягачи и прицепы, а также различные схемы их соединения, выдвигают на передний план проблему описания движения таких автопоездов и, прежде всего, криволинейного.
Рис. 1. Схема автопоезда
Шарнирное соединение двух и более транспортных средств позволяет использовать комбинированные движители: колесные, гусеничные и др., что естественно требует единого подхода к описанию их взаимодействия с грунтом.
В имеющихся исследованиях автопоездов [2, 3, 10] рассмотрены различные аспекты проблемы, однако изучается либо узкий класс машин [2], либо математические модели движения, основанные на предпосылках, оправданных для узкого класса движений [3, 10]. Отсутствие хорошо разработанной теоретической базы тормозит проектирование новых промышленных образцов столь необходимой техники [12].
Будем в дальнейшем различать сочленённую машину и автопоезд.
Отличительным признаком этих машинных агрегатов является характер управления криволинейным движением, определяемый свойствами связей между его частями. Дело в том, что у сочле нённой машины углы складывания, характеризующие взаимное расположение тягача и прицепов, являясь управляющими параметрами, имеют каждый раз фиксированные значения или заданные законы изменения. У автопоезда эти параметры образуются под действием внешних сил, вызываемых движением тягача и управляемых колёс прицепа, по крайней мере, в пределах допускаемых конструктивными ограничениями. Углы складывания в этом случае являются величинами неизвестными и для своего определения требуют дополнительных уравнений связей.
Рассмотрим вначале стационарный поворот, который является основой при составлении математической модели любого криволинейного движения, определяет главные положения и допуще ния, легко проверяемые в эксперименте.
Для составления модели стационарного поворота автопоезда воспользуемся подходом, принятым при составлении обобщённой модели поворота транспортной машины [5, 7, 9]. В основе этого подхода лежит положение о взаимодействии площадки контакта опорного элемента (колеса или гусеницы) с грунтом как фрикционной пары (гипотеза Ф.А. Опейко [7]) с постоянным или переменным коэффициентом трения, зависящим от скорости скольжения в точке и описываемым с помощью формул В .В. Кацыгина [9]. Этот подход нашел экспериментальное подтверждение как для гусеничных [1], так и для колесных машин [3, 9].
Согласно принятому подходу силы, действующие на движущуюся машину со стороны грунта, однозначно определяются положением центров вращения опорных площадок относительно самих площадок [7]. В связи с этим, задача движения при стационарном повороте свободной тяговой (транспортной) машины сводится к нахождению 2п координат центров вращения п опорных пло-
Расчет и конструирование
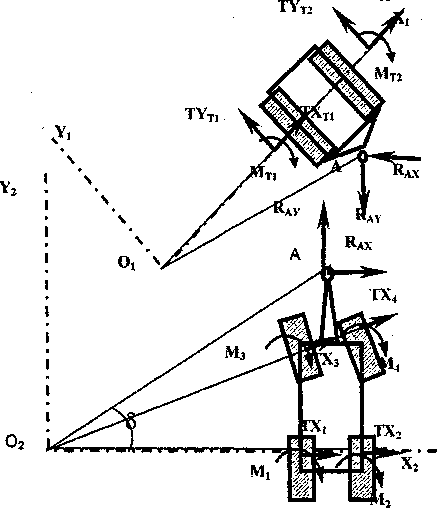
Рис. 2. Схема стационарного поворота автопоезда при его расчленении
щадок. Дополнительно определяются координаты центра вращения (поворота) самой машины. В итоге, для описания стационарного криволинейного движения самоходной машины должна быть составлена и решена система 2п+2 уравнений относительно 2п+2 неизвестных. Метод составления такой системы подробно изложен в работах [4, 5,6, 9].
При решении задачи движения автопоезда, обычно прибегают к его расчленению на отдельные транспортные единицы (рис. 2), движение которых описывается самостоятельно с учётом дополнительно действующих на каждую часть автопоезда сил в местах соединений.
Рассмотрим автопоезд, состоящий из шарнирно соединённых тягача и прицепа. На тягач кроме указанных выше сил, действует неизвестная по модулю и направлению реакция в шарнире (Rx, Ry), что добавляет еще 2 неизвестные.
Описание движения прицепа принципиально не отличается от описания движения тягача. Количество неизвестных в уравнениях движения прицепа, так же как и тягача, равно 2т+4, где т - число площадок контакта прицепа с грунтом. Таким образом, общее число
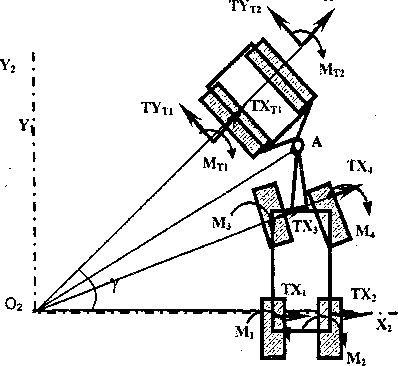
Рис. 3. Схема стационарного поворота автопоезда без его расчленения
неизвестных при движении автопоезда, с учетом угла складывания, составляет 2(п+ш)+9.
Покажем как составляется модель движения автопоезда, состоящая из уравнений движения тягача, прицепа и совместного движения (совместности).
Для тягача, как самоходной тяговой машины, согласно выбранному методу, составляется 2п+2 уравнения движения. Система содержит 3 уравнения равновесия, п уравнений геометрических и п-1 уравнений кинематических связей, определяемых на основании теоремы ортогональности [4].
Для прицепа, так же как и для тягача, составляются 3 уравнения равновесия, m уравнений геометрических связей. Количество кинематических связей зависит от типа прицепа. Для пассивного прицепа со всеми свободно катящимися опорными элементами движителя число таких уравнений равно m (в форме равенства нулю тяговых усилий [6]). Для активного прицепа, как и для самоходной машины, число уравнений кинематических связей равно т-1. Однако в этом случае к уравнениям совместности добавляется ещё одно (в форме распределения тяговых усилий между тягачом и прицепом [6]).
Два уравнения совместности описывают равенство сил в шарнире [8].
Легко показать, что при стационарном повороте, когда отсутствует относительное движение частей автопоезда, их центры поворота совпадают. Это позволяет составить ещё два недостающих уравнения.
Такой метод составления модели движения приводит к системам уравнений большой размерности. Так, например, для описания движения автопоезда, состоящего из шарнирно соединённых между собой двухгусеничного тягача и четырёхколёсной тележки необходимо составить и решить систему из 21 уравнения.
В рамках принятого подхода, когда не требуется определение внутренних сил в шарнире, существует другой путь решения этой задачи. Рассматривая автопоезд как единое целое (рис. 3), и записав для него 2(n+m)+2 уравнения, следует добавить лишь условие
Нарадовый Д.И., Позин Б.М., О задаче стационарного поворота Трояновская И.П. автопоездов равновесия одной из частей автопоезда в форме равенства нулю суммы моментов (относительно шарнира) от сил, действующих на эту часть автопоезда. Полученная система будет содержать 2(n+m)+3 уравнения и позволяет найти необходимые центры вращения, а с ними все силовые и кинематические факторы, характеризующие движение автопоезда, включая угол складывания.
В рассмотренном выше примере общее число уравнений вместо 21 будет равно 15.
Эффективность второго способа возрастает по мере роста числа прицепов в автопоезде. Так движение автопоезда, состоящего из четырехколесного тягача и трех четырехколесных прицепов, описывается первым способом 55 уравнениями, при использовании второго - 37.
Список литературы О задаче стационарного поворота автопоездов
- Апанасик, В.Г. Экспериментальные исследования пассивного поворота гусеничной машины при страгивании/В.Г. Апанасик, В.А. Бурматов, В.И. Костюченко, Б.М. Позин, И.П. Трояновская//Достижения науки агропромышленному комплексу: материалы XLIII научно-технической конференции. -Челябинск: ЧГАУ, 2004. -С. 201-204.
- Гуськов В.В., Опейко А.Ф. Теория поворота гусеничных машин. -М.: Машиностроение, 1984.-168 с.
- Казаченко Г.В. Исследование погруженности колес движителя с бортовой схемой поворота при движении на повороте: Заключительный отчет. -Минск: Белорусский государственный политехнический институт, 1977. -194 с.
- Позин, Б.М. Кинематические соотношения при повороте колесной (гусеничной) транспортной машины/Б.М. Позин, И.П. Трояновская//Вестник Южно-уральского государственного университета. серия Машиностроение. -2005. -вып.7. -№14(54). -с.93-96.
- Мицын, Г.П. Модель стационарного поворота транспортной (тяговой) машины/Г.П. Мицын, Б.М. Позин, И.П. Трояновская//Техника и технология строительства и эксплуатации автомобильных дорог: сборник научных трудов МАДИ (ТУ). -М., 2000. -С. 88-92.
- Мицын, Г.П. Уравнения связей для некоторых случаев стационарного поворота транспортной (тяговой) машины/Г.П. Мицын, Б.М. Позин, И.П. Трояновская//Вестник Уральского межрегионального отделения Российской академии транспорта. -Курган: КГУ. -2001. -Вып. 3-4. -С. 274-277.
- Опейко Ф.А. Колесный и гусеничный ход. -Минск, 1960. -228 с.
- Торг С.М. Краткий курс теоретической механики. -М.: Высшая школа, 1986. -416 с.
- Трояновская И.П. Повышение эффективности малогабаритного погрузчика путем улучшения его поворотливости//Автореферат дис.... канд. техн. наук. -Челябинск: Изд-во ЧГАУ, 2002-228 с. 10.
- Трехзвенные автопоезда/Я.Е. Фаробин, A.M. Якобашвили, А.М. Иванов и др. -М.: Машиностроение, 1993. -С. 174.
