Об использовании тензора логарифмической деформации

Автор: Садаков Олег Сергеевич, Щербакова Алла Олеговна
Рубрика: Механика
Статья в выпуске: 3 т.6, 2014 года.
Бесплатный доступ
Отказ от гипотезы малости перемещений в механике деформируемого тела приводит к проблемам, связанным с геометрической нелинейностью, которые до сих пор не решены до конца, несмотря на свою актуальность для практических приложений. Одна из таких проблем относится к понятию логарифмической деформации. Скалярная логарифмическая деформации в ряде случаев полезна, но тензор логарифмической деформации обычно лишен смысла.
Геометрическая нелинейность, конечные деформации, логарифмическая деформация, тензор генки, инженерная деформация, простой сдвиг
Короткий адрес: https://sciup.org/147158831
IDR: 147158831 | УДК: 531
On the use of logarithmic strain tensor
The rejection of the small displacements hypothesis in the mechanics of deformable solids leads to some problems connected with geometrical nonlinearity. At present, these problems are still not completely solved despite their relevance to practical applications. One of these problems is the concept of logarithmic strain. The scalar logarithmic strain is effective in some cases but the logarithmic strain tensor is usually useless.
Текст научной статьи Об использовании тензора логарифмической деформации
Тензор логарифмической деформации в настоящее время является одной из наиболее попу лярных мер деформации тела при решении геометрически нелинейных задач. Он представляет собой обобщение скалярной логарифмической деформации
введенной Людвигом в 1909 г., перенесенной на область тензоров [1]. Идея Людвига состояла в том, чтобы сравнивать текущую длину растягиваемого стержня не с начальной длиной 10, как при использовании обычной инженерной деформации
1 — 1A
Е = - = l0
а с длиной стержня в предыдущем состоянии. Логарифмическая деформация (1) однозначно выражается через инженерную деформацию e = ln (1 + е)(3)
и наоборот, инженерная выражается через логарифмическую
Е = exp( e) — 1.(4)
Таким образом, зная одну, легко получить другую. Для величины e Людвиг в свое время ввел термин effective specific strain - особая эффективная деформация , а несколько позже Надаи предложил новое название - натуральная деформация [2]. В настоящее время широкое распространение получили термины: истинная деформация и логарифмическая деформация .
В 1928 г. Генки [3] предложил распространить идею Людвига на случай трехмерной деформации, введя по аналогии с выражением (3) тензор логарифмической деформации, иногда называемый его именем - тензором Генки e = ln(I + е). (5)
Здесь и ниже тензоры и векторы обозначены жирными символами - для того, чтобы отличать их от скаляров. В выражении (5) е - это тензор инженерной деформации, связывающий векторы 10 волокон тела в начальном состоянии (до деформирования) с векторами l в деформированном состоянии
A l = е - l 0, A l = l — l 0,
I - единичный тензор. Сумму тензора е и единичного тензора обычно называют тензором удлинений (иначе, тензор растяжения или тензор коэффициентов длины )
U = I + е . (7)
В 1956 г. Дойл и Эриксон [4] ввели понятие обобщенной деформации
E ( m ) = — ( и m - 1 ) . (8)
m
Здесь разные значения m соответствовали разным мерам деформации. В частности, при m = 0 у Дойла и Эриксона получился тензор логарифмической деформации.
Таким образом, как и в случае одноосной деформации, в общем случае имеются две альтернативные меры деформации: инженерная и логарифмическая. И, как показывает практика, логарифмическая деформация более популярна среди инженеров-механиков (при решении геометрически нелинейных задач). Это, по-видимому, объясняется тем, что использование логарифма позволяет заменять произведения суммами, упрощая решение задач. Например, чтобы найти относительное изменение объема элемента твердого тела, можно вместо традиционного выражения
А V
V o
= (1 + ^ 1 )(1 + ^ 2 )(1 + ^ э ) - 1,
использовать более простое:

= e 1 + e 2 + e 3
Условие несжимаемости среды при этом принимает вид е1 + е2 + е3 = 0, то есть тензор логарифмической деформации напоминает девиатор. Удобно также разделять логарифмическую деформацию e на упругую составляющую и неупругую:
e = e е + e p . (12)
Эта сумма напоминает геометрически линейный подход.
При решении инженерных задач тензор логарифмической деформации связывают с некоторыми мерами напряжений, например, Кирхгофа [5] или Коши [6, 7]. Однако достоверность полученных результатов при этом вызывает серьезные сомнения [8]. Ниже будет показано, что использование тензора логарифмической деформации имеет смысл только в главных осях.
Вычисление тензора логарифмической деформации
Известно [9], что для получения какой-либо функции двухвалентного тензора T достаточно знать его главные числа { X i } и главные направления, которые обычно задают единичными векторами { c i } - главными векторами. Особенность главных векторов состоит в том, что при скалярном умножении на тензор T они не поворачиваются:
T • C i =X c . (13)
Соответствующее характеристическое уравнение
| T — V\ = 0 (14)
позволяет найти главные числа и векторы тензора T . Для вычисления функции тензора необходимо записать его в главных координатах, применив эту функцию к главным значениям. У симметричного тензора все главные числа вещественны, а главные направления взаимно ортогональны. Следовательно, натуральный логарифм тензора U определяется в трехмерном пространстве суммой трех слагаемых
In U = ln( u i ) ci ci , (15)
где i =1^3, ui - это главные числа тензора U, а ci - векторы декартового базиса, совпадающие с главными направлениями тензора U. Отметим, что, согласно выражениям (7) и (13), тензоры U и е имеют одинаковые главные направления, а их главные числа отличаются на единицу ui = Ei+ 1. (16)
В матричной форме выражение (16) имеет вид
Механика
[ e ] =
ln u 1
ln u 2 0
0 ln u 3
При записи матричных выражений следует помнить о том, в каком именно базисе это сделано. Например, выражение (17) содержит координаты тензора, записанного в декартовом базисе, направления которого совпадают с главными направлениями этого тензора. В другом базисе координаты будут другими.
Деформации и жесткие повороты
При неоднородном деформированном состоянии тела обычно рассматривают деформирование элементарных объемов, материальные волокна которых бесконечно малы. Тогда деформированное состояние каждого из таких объемов можно принять однородным. В этом случае волокна, прямые до деформирования, при деформировании не искривляются, и их удобно обозначать векторами. При деформировании элементарного объема его главные волокна (волокна, описываемые главными векторами тензора деформации) не поворачиваются, а только удлиняются или укорачиваются. Однако деформирование соседних элементарных объемов способно вызывать жесткий поворот последнего, при этом его главные волокна поворачиваются. Оператором линейной связи между векторами элементарных волокон в начальном и деформированном состоянии в этом случае служит тензор дисторсии F l = F ■ lо, (18) включающий в себя деформацию элементарного объема и его жесткий поворот
F = R ■ U = V ■ R . (19) В этом выражении, которое обычно называют полярным разложением тензора дисторсии, U и V -это соответственно правый и левый тензоры удлинений (симметричные тензоры):
U = Еи +1, V = Еу +1, (20) выраженные соответственно через правый ги и левый eV тензор инженерной деформации, а R -тензор жесткого поворота на угол ф против часовой стрелки вокруг оси, заданной единичным вектором n
R = nn + ( I — nn ) cos ф + Э ■ и sin ф .
Здесь Э = —5 ijk e i e у e k - это тензор Леви-Чевитты ( 5 i jk - символ Веблена). На плоскости, перпендикулярной вектору и , в декартовом базисе матрица этого тензора имеет довольно простой вид
[ R ] =
COS ф sin ф
— sin ф cos ф
.
Поскольку тензор жесткого поворота является ортогональным тензором (то есть R — 1 = R T ), связь между левым и правым тензором удлинений, следующая из полярного разложения дисторсии (19), линейна
V = R ■ U ■ R T . (23)
Это выражение означает, что левый тензор удлинений получается поворотом правого тензора на угол жесткого поворота.
Полярная декомпозиция тензора дисторсии основана на следующих соображениях. На рис. 1 показана схема дисторсии элементарного объема тела (для наглядности рассмотрена двумерная задача), в результате которой материальные волокна вытянулись (либо укоротились) и повернулись. Произвольный вектор l0, отвечающий некоторому множеству материальных волокон в на чальном состоянии, изменил свою длину и направление. Сейчас это вектор lF = F ■ l0, отвечающий тому же множеству материальных волокон в деформированном состоянии. Этот вектор можно представить двумя способами. В первом способе сначала рассматривают деформацию элементарного объема, получая при этом вектор lU = U ■ l0, а затем его жесткий поворот
If = R ■ lu = UU ■ lо.
F
В результате тензор дисторсии выражается через правый тензор растяжений F = R • U. Во втором способе сначала рассматривают жесткий поворот, получая вектор lR = R • 10, а затем дефор мацию
If = V • Ir = RR • lо.
F
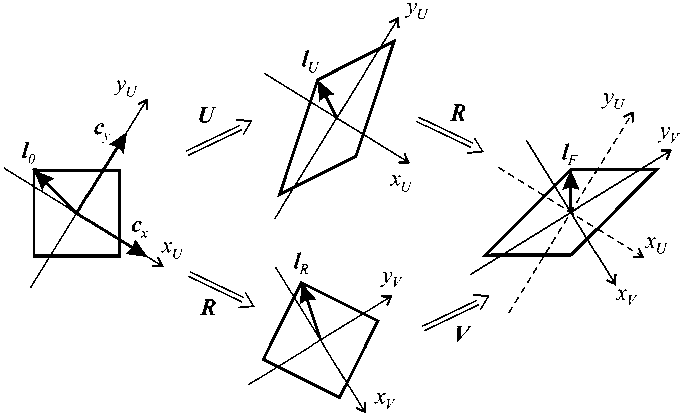
Рис. 1. Дисторсия элементарного объема
Тензор дисторсии при этом выражается через правый тензор растяжений F = V • R .
По аналогии с введением двух тензоров удлинений - правого и левого, вводят два тензора логарифмической деформации. Взятие логарифмической функции тензоров U и V , дает соответственно правый и левый тензоры логарифмической деформации:
eU = ln U , eV = ln V . (26)
Смысл координат
Обычно тензоры логарифмической деформации записывают в главных координатах, так как именно эта форма записи позволяет извлечь из них полезную информацию в виде логарифмических деформаций главных волокон. Например, координаты тензора eU = lnuxcxcx + lnuycycy , (27) записанного в декартовом базисе { cx, cy} (см. рис. 1), векторы которого направлены вдоль главных осей хи и yU этого тензора, представляют логарифмические деформации главных волокон. Этим, собственно, и ограничивается полезная с точки зрения механики информация, содержащаяся в этом тензоре. Получить какую-либо информацию о деформировании других волокон с помощью этого тензора невозможно.
Что касается тензора eV, то он согласно выражениям (23) и (26) получается жестким поворотом правого тензора удлинений eV = ln( R • U • R T).
Следовательно, его главные координаты ( xV и yV на рис. 1) совпадают с главными координатами тензора eU ( xU и yU на рис. 1). По сути, тензор eV содержит ту же информацию, что и тензор eU . Однако для получения этой информации необходимо не только направить базисные векторы вдоль главных осей, но и следить за их жестким поворотом, что усложняет координатную и матричную форму записи тензорных выражений [10].
В отличие от тензора логарифмической деформации (левого или правого), тензор инженерной деформации содержат существенно больше полезной информации о деформировании тела. Во-первых, согласно выражению (6), его проекция на вектор, задающий некоторое материальное волокно, дает вектор изменения этого волокна, определяющий его удлинение (укорочение) и поворот. Во-вторых, столбцы матрицы тензора е представляют изменения базисных векторов, причем базисные векторы могут и не совпадать с главными направлениями тензора е . В-третьих, диагональные элементы матрицы [ в ] представляют линейные деформации волокон в направле-
Список литературы Об использовании тензора логарифмической деформации
- Ludwik, P. Elemente der Technologischen Mechanik/P. Ludwik. -Berlin: Applied Mechanics, Verlag von J. Springer, 1909. -57 p.
- Nadai, A. Plastic Behavior of Metals in the Strain-Hardening Range. Part I/A. Nadai//J. Appl. Phys. -1937. -Vol. 8. -P. 205-213.
- Hencky, H. Uber die Form des Elastizitatsgesetzes bei ideal elastischen Stoffen/H. Hencky//Zeit. Tech. Phys. -1928. -Vol. 9. -P. 215-220.
- Doyle, T.C. Nonlinear elasticity/T.C. Doyle, J.L. Ericksen//Advances in applied mechanics IV. -New York: Academic Press, Inc. -1959. -P. 53-115.
- Аннин, Б.Д. Допустимые формы упругих законов деформирования в определенных соотношениях упруго-пластичности/Б.Д. Аннин, С.Н. Коробейников//Сибирский журнал индустриальной математики. -1998. -Т. 1, № 1. -C. 21-34.
- ANSYS -а general purpose finite element program. Rev. 5.0./Houston (PA): Swanson analysis system Inc. -1996. -510 р.
- Горлач, Б.А. Конечные деформации в задачах формования неупругих тел/Б.А. Горлач, Е.А. Ефимов//Математическое моделирование систем и процессов. -1992. -№ 1. -C. 67-81.
- Садаков, О.С. Конечные деформации в механике деформируемого твердого тела/О.С. Садаков//Вестник ЮУрГУ. Серия «Математика, физика, химия». -2005. -Вып. 6. -№ 6(46) -C. 114-121.
- Ланкастер, П. Теория матриц/П. Ланкастер. -М.: Наука. -1973. -280 c.
- Truesdell, C. The Classical Field Theories/C. Truesdell, R. Toupin; S. Flugge (ed)//Encyclopedia of Physics. -Berlin: Springer-Verlag, 1960. -Vol. III/1. -P. 226-793.
