Об одном решении задачи резонансных колебаний каната грузоподъемной установки с учетом его проскальзывания при навивке по поверхности барабана

Автор: Литвинов В.Л., Шамолин М.В., Литвинова К.В.
Журнал: Вычислительная механика сплошных сред @journal-icmm
Статья в выпуске: 3 т.18, 2025 года.
Бесплатный доступ
В работе предлагается математическая модель и методы анализа неклассической задачи о продольных колебаниях каната, который, начиная с верхнего конца, наматывается на барабан, а на его нижнем конце закреплен груз. Учет проскальзывания каната по поверхности барабана позволяет адекватно описать реальные динамические процессы в системе. Формулировка задачи о колебаниях, как задачи с движущимися границами, в виде дифференциального уравнения с неинтегрируемыми граничными условиями обеспечивает неклассическое обобщение задачи гиперболического типа. Проведение линеаризации граничных условий методом усредненных оценок упрощает исходную постановку. Построение эквивалентных интегро-дифференциальных уравнений с симметричными и зависящими от времени ядрами, а также изменяющимися во времени пределами интегрирования создает основу для применения аппарата интегральных уравнений. Рассмотрение случаев как с учетом, так и без учета проскальзывания делает возможным осуществление комплексного анализа динамических характеристик системы. Приведение интегро-дифференциального уравнения к безразмерному виду посредством введения новых переменных унифицирует математическую модель. Решение полученного интегро-дифференциального уравнения без учета проскальзывания с помощью комбинации приближенного метода построения решений интегро-дифференциальных уравнений и метода Канторовича-Галеркина демонстрирует приемлемую точность расчетов. Выражение для амплитуды колебаний, соответствующих n-й динамической моде, полученное асимптотическим методом, является аналитической базой для оценки резонансных свойств. Исследование явления установившегося резонанса и прохождения через резонанс системы с использованием численных методов и авторского программного комплекса представляет практическую ценность для динамического расчета грузоподъемных устройств с целью повышения их надежности.
Колебания систем с движущимися границами, канат переменной длины, резонансные свойства, численные методы, интегро-дифференциальные уравнения, амплитуда колебаний
Короткий адрес: https://sciup.org/143185184
IDR: 143185184 | УДК: 534.11 | DOI: 10.7242/1999-6691/2025.18.3.24
On one solution to the problem of resonant oscillations of a lifting rope taking into account its slippage when winding on the surface of a drum
In this paper, we develop a mathematical model and methods for analyzing a non-classical problem of longitudinal oscillations of a rope, the upper end of which is wound on a drum, and a load is fixed to its second end. Taking into account the slippage of rope elements along the drum rim allows one to adequately describe the real dynamic processes in the system. Representing the problem of rope oscillations with moving boundaries as a differential equation with non-integrable boundary conditions provides a non-classical generalization of the hyperbolic problem. The linearization of boundary conditions by the method of averaged estimates simplifies the initial statement of the problem. The construction of equivalent integro-differential equations with symmetric and time-dependent kernels, as well as with time-varying integration limits, creates the basis for applying the apparatus of integral equations. Consideration of cases both with and without slippage provides a comprehensive analysis of the dynamic characteristics of the system. Reducing the integro-differential equation to a dimensionless form by introducing new variables unifies the mathematical model. The solution of the obtained integro-differential equation without taking into account slippage using a combination of the approximate method for constructing solutions of integro-differential equations and the Kantorovich-Galerkin method demonstrates the acceptable level of accuracy for calculations. The expression for the amplitude of oscillations corresponding to the n-th dynamic mode, obtained by the asymptotic method, is an analytical basis for analyzing the resonance properties. The study of the phenomenon of steady-state resonance and passage through resonance of the system by numerical methods and the developed software package has practical value for the dynamic calculation of lifting devices.
Текст научной статьи Об одном решении задачи резонансных колебаний каната грузоподъемной установки с учетом его проскальзывания при навивке по поверхности барабана
Исследование динамики канатов переменной длины в рамках теории колебаний представляет значительный теоретический и практический интерес в задачах механики деформируемого твердого тела. Исторически разработка этих вопросов велась разрозненными группами, решавших задачи, которые на первый взгляд не имели между собой ничего общего. Так, специалисты по эксплуатации железных дорог и мостов изучали динамическую устойчивость конструкций под подвижными нагрузками, специалисты по силовым передачам — динамику гибких ветвей передач, а в горной механике — проблемы динамики шахтного подъема с использованием канатов переменной длины.
Широкое распространение в технике объектов с движущимися границами, от чувствительных элементов измерительных приборов и передач с гибкой связью до бурильных колонн и систем с упруго-инерционным основанием, обусловливает необходимость развития методов их математического моделирования. Особую актуальность эти задачи приобретают при разработке научных основ прочности, надежности и долговечности горных машин и механизмов [1 –3] , подъемно-транспортной [4, 5] , буксирной и траловой техники [6 –9] . В последнее время к этому перечню добавились задачи баллистики гибких нитей, увлекаемых движущимися телами, что открывает новые перспективы для приложений в специальных областях деятельности человека.
Математическая формулировка подобных задач выходит за рамки классических краевых задач математической физики и сводится к исследованию уравнений гиперболического типа в областях с переменными границами и интегро-дифференциальных уравнений с симметричными, зависящими от времени ядрами. Важным преимуществом интегральных методов является их эффективность при рассмотрении сложных динамических систем с сосредоточенными массами и подвижными нагрузками. Значительный вклад в развитие этой области внесли работы Х.А. Рахматулина [10] по изучению упруго-пластических волн в нитях, А.Н. Динника [11] по динамике шахтных подъемных канатов, А.С. Локшина [12] по расчету усилий в стержнях переменной длины.
В настоящее время для решения задач с подвижными границами применяются асимптотические методы Н.М. Крылова, Н.Н. Боголюбова и Ю.А. Митропольского [13] , метод Канторовича–Галеркина [14 –18] , а также метод построения решений интегро-дифференциальных уравнений [19 –21] . Однако до сих пор не существует общего подхода к формулировке этих задач, и в каждом конкретном случае требуется адаптация существующих методов.
Особую сложность вызывает математическое описание процессов, происходящих в системах с движущимися границами и неинтегрируемыми условиями связи. Классические подходы к моделированию подобных систем, предложенные в работах Н.П. Неронова [22] , Г.Н. Савина [23] , а также Г.Н. Савина и О.А. Горошко [24, 25] ,
Статья опубликована в открытом доступе по лицензии CC BY 4.0
сводятся к решению сложных функционально-дифференциальных уравнений, что существенно ограничивает возможности их анализа и практического использования.
В настоящей работе рассматривается задача о продольных колебаниях каната грузоподъемного устройства. Верхний конец каната наматывается на барабан, а нижний несет сосредоточенную массу груза; канат может скользить по поверхности барабана. Учет проскальзывания и движения границ принципиально меняет характер граничных условий: они становятся неголономными. Это приводит к необходимости разработки специальных математических методов изучения системы.
Основное внимание уделено интегральному подходу к формулировке задачи, позволяющему свести исходную проблему к интегро-дифференциальным уравнениям с симметричными ядрами. Благодаря этому открывается возможность применения асимптотических методов нелинейной механики и создания эффективных вычислительных алгоритмов для количественного анализа динамических характеристик системы. Предлагаемый подход и методы его реализации преодолевают ограничения классических подходов и представляют практическую ценность для расчета и оптимизации динамических показателей широкого класса грузоподъемных устройств и механизмов с переменной длиной несущих элементов.
-
2. Постановка задачи
Рассмотрим задачу возникновения продольных колебаний каната грузоподъемной установки, наматываемого на барабан, а на нижнем (ненамотанном) конце, несущем жестко закрепленный груз [26] . За счет навивки на барабан, вращающийся с заданной скоростью, длина каната изменяется. Начало координат поместим в точке, в которой канат неподвижно связан с барабаном. Направление декартовой оси x совпадает с направлением действия силы тяжести.
Продольные колебания каната опишем уравнением:
Ztt(x,t) - d 2 SgZ xx (x,t)= g. (1)
В (1) обозначено: Z(x,t) — продольное смещение точки с координатой x в момент времени t; a = у/E/p — скорость распространения продольных колебаний , где E , ρ — модуль упругости и линейная плотность материала каната; S — площадь поперечного сечения каната; g — ускорение свободного падения. Здесь и далее индексы t и x указывают на дифференцирование функции Z(x,t) по соответствующему аргументу.
Граничное условие на нижнем — несущем, конце каната (x = l(t = 0)) представим как уравнение движения груза [26] :
Ztt(l(0),t) + ESgZx(l(0),t) = g.(2)
m
С учетом (1) граничное условие (2) принимает вид:
Zxx(l(0)^t) + aZx(l(0)^t) = 0.(3)
Здесь a = E/ mma2^ , m — масса груза.
В верхней точке (x = l 0 (v 0 t)) ненамотанной части каната при отсутствии проскальзывания граничное условие запишем так:
Zt(lo(vot),t) = F0‘ (^ot).(4)
Здесь l o (v o t) = L o — v o t — закон движения верхней границы, где v 0 окружная линейная скорость точек поверхности барабана; L 0 —начальная длина каната; F o (v o t) —функция, характеризующая внешнее возмущение (штрих означает дифференцирование по времени); ω 0 — частота внешнего возмущения. Будем считать, что l o (v o t) является функцией медленного времени: т * = v o t, l o (v o t) = 1 0 (т * ), то есть ее производная по времени dl o (v o t)/dt = v 0 dl 0 (T)/dT * пропорциональна некоторому малому параметру v 0 . На практике в подъемных установках условие медленного изменения параметров обычно соблюдается.
Проинтегрировав условие (4) по времени с учетом выражения для полной производной
Z t (l o (v o t) ,t) = dZ ^’t ) — v o Z x (l o (v o t) ,t) 1 0 (v o t), (5)
получим:
t
Z (l o (v o t'),t') - v oj'Z x^v o Z ),Z)l o (v o Z)dZ = F o (^ o t). (6)
Граничное условие (6) — неголономное (неинтегрируемое). При фиксированной длине ненамотанного конца каната l' o (v o t) = 0 оно преобразуется к классическому виду:
Z (l o (v o t'),t') = FoM.
С учетом проскальзывания каната по поверхности барабана граничное условие в верхней точке ненамотанного конца становится следующим:
Z t (l o (v o t) — Al o (v o t) ,t) = F & (v o t), (7)
где (l o (v o t) — Al o (v 0 t)) — положение точки, в которой исчезает проскальзывание каната при набегании на барабан. Разложим (7) в ряд Тейлора в окрестности точки x = 1 0 (v o t) с сохранением только двух первых членов ряда:
Zt (lo (vot) ,t) — Alo (vot)Zxt (lo (vot) ,t) = F0 (^ot).(8)
Полный дифференциал функции Al o (v o t)Z x (l o (v o t) ,t) с точностью до членов 2-го порядка малости имеет вид [26] :
d (Alo(vot)Zx(lo(vot),t)) = d (Alo(vot))Zx(lo(vot),t) + Alo(vot)Zxt(lo (vot),t).(9)
С учетом (8) и (9) из (7) следует:
Zt (lo (vot) ,t) = d- (Alo (vot)Zx(lo (vot) ,t)) — d- (Alo {vot))Zx (lo (vot) ,t) + F M.(10)
dtdt
Подставив (10) в (5) и проинтегрировав от 0 до t, получим граничное условие при наличии проскальзывания:
t
Z(lo№,t) — J‘Zx(lo(v0Z),Z)(l'o(voZ) — Al' Ы))dZ — Alo(vot)Zx(lo(vot),t) = Fo^t).(11)
о
Внешнее возмущение F o (wot) в (11) примем равным
Fo(^ot)= vot+Asin(^ot), где Asin(^ot) — слабые возмущения гармонического характера, связанные с отклонением формы барабана от цилиндра, а также с его вибрациями .
Величины Al o (vot), Al ’ (vot) нелинейно зависят от функций Z(l o (vot),t), Zx(l o (vot),t). Максимальная длина дуги проскальзывания — Al max , наблюдается при скоростях вращения барабана v o ^ 0. При этом проскальзывание отсутствует (AI = 0) при скоростях, больших некоторой критической скорости vq > v cr .
Для линеаризации (11) — граничного условия при наличии проскальзывания, введем усредненные оценки Al o (vot), Al ’ (vot) величин Al o (vot), Al ’ (vot):
π /2
4^.0=2
Al max cos(^vot) d(wvOt),
где ω — частота колебаний каната на основной динамической моде. Тогда
Al' 0 (vot) = — Al max ^v o sin(^vot). (13)
С учетом (12) и (13) граничное условие (11) принимает линеаризованный вид:
t
Z (l o (vot),t)-l
Z x (l o (voZ),Z) ll'o(voZ) — Al 0 (v°Z )) dZ — Al o (vot)Z x (l o (vot),t)
= F o (^ot).
При фиксированной длине ненамотанной части каната l o = const граничное условие (14) становится следующим:
t
Z (lo,t) + Jzx { Io,C ) Al 0 (voZ )dZ — Al o (vot)Z x (lo,t) = FoM. (15)
о
Условие (15) описывает проскальзывание каната по поверхности неподвижного барабана при колебаниях его ненамотанной части.
В случае, если скорость подъема v o (t) переменная, между законом движения границы l o (vot) и скоростью v o (t) имеет место следующее соотношение:
l0 (vot)(1 + Zx(lo(vot),t)) = vo(t).(16)
При этом уравнение (1) и граничные условия (2) преобразуются к виду:
Ztt(x,t) —a2SgZxx(x,t)= g—v’ (t),(17)
Ztt (l(0),t)+ZZx(l(O),t) = g—v0 (t).
Знак минус в правой части (17) и (18) означает подъем груза.
Для определения длин ненамотанных концов канатов с высокой продольной жесткостью, например, стальных, после пренебрежения величиной Zx(lo(vot),t), малой по сравнению с единицей, вместо (16) можно пользоваться приближенной формулой:
t
l o
(v o t) = У v o (Z )dZ.
o
Таким образом, дифференциальное уравнение и линеаризованные граничные условия задачи о продольных колебаниях каната грузоподъемной установки, который наматывается на барабан, с учетом проскальзывания имеют вид (1) , (3) , (14) . При отсутствии проскальзывания в постановку задачи входит граничное условие в верхней точке ненамотанного конца каната (6) .
Начальные условия не влияют на резонансные свойства и принимаются следующими:
Z (E,0)=0, Z t (E,0) = 0.
-
3. Математическая модель продольных колебаний каната переменной длины
Применим метод построения решений интегро-дифференциальных уравнений [19 –21] при граничных условиях, содержащих неинтегрируемые члены, то есть в случае, когда длина ненамотанной части каната все время меняется. Тогда решение сводится к двойному интегрированию уравнения (1) в пределах l 0 (v o t) < E < l(0) с граничными условиями (3) , (14) .
Выполним первое интегрирование:
dZ (x,t) dZ (lo(vot),t)_ 1 X Г d2Z (s,t) dx dx a2Sg Jdt
l o ( v o t )
После повторного интегрирования (19) по x получим:
A dZ(lo(vot'),t') 1 [ , Г ^Z (St1.
Z(x,t)-Z(lo(vot),t)-\x-lo(vot)\-----dx-----= asg J (x-s) —dt2g ds.(20)
l o ( v o t )
При построении выражения (20) использована методика изменения порядка интегрирования в двойном интеграле в правой части (19) . Уравнение (20) содержит искомую функцию и ее значения в граничных точках.
На основании (14) исключим из (20) граничное условие
t
Z (l o (v o t),t) = I
Z x (l o (v o Z ),Z ) (i o (v o Z ) - < (v o Z )) dZ+Al o (v o t)Z x (l o Ы) ,t)+ F o (^ o t).
o
Для этого распространим интегрирование в (19) от l o (v o t) до l(0) и учтем граничные условия (2) :
dZ (loM,t ∂x
l(o)„ dZ (l(0),t)__1 Г d2Z (s,t)
ds =
dx a2Sg Jdt lo(vot)
i (o)
m S' d 2 Z (l(0),t) \ 1 Г Г d2Z (s,t)
ds.
ESg\ dt2 g) - a2Sg J [ dt2g lo(vot)
Подстановка (21) , (22) в (20) и запись результата преобразований относительно Z (x, t), приводит к интегро-дифференциальному уравнению:
t
Z(xA= / do(voZ)-^(voZ)Х+лым' . -
∂x ∂xES
о
-
(l(o) \X
m / д \ р 7 Г d2Za jA? Г x- Гd - 1Л+Fo(4)t).(23)
g \ dt 2 / 9 J t dt 2 J I g J es L dt 2
l 0 ( v 0 t ) l 0 ( v 0 t )
Используя свойство аддитивности, представим в (23) интеграл
l (0) !
как сумму:
x l (0)
преобразований получим:
l o ( v o t )
I+
l 0 ( v 0 t ) x
. После элементарных
l (0)
у P f ,n[ d 2 Z(s,t) 1. X - loM m ( d 2 Z(l(O),t) V
Z(x^ = -g J K(x,s,lo(vot))[ —dt2g\dsES—— ---dt2g) + l0(v0t)
/dz(i o (v o z),z ) /, ‘, dZz(l o №,t)
+ ------ dx ------(l o tv o C) — ^l o (v o z)' dz+ Al o (v o t)-----dX +F o (w o t).
В уравнении (24) ядро K(x,s,l o (v o t)) имеет вид:
{ s - l o (v o t)
ES x-lo(vot) ES
s ⩽ x, s ⩾ x.
Для каната переменной длины ядро является, с одной стороны, симметричной относительно x и s функцией влияния при фиксированном значении l o (v o t) = const, а с другой, — функцией, совпадающей с функцией удлинения каната. Кроме того, K(x,s,l o (v o t)), оставаясь симметричным, зависит от времени через параметр изменяющейся длины каната l o (v o t) .
Заметим, что существует альтернативный подход к построению решения задачи продольных колебаний каната переменной длины в виде интегро-дифференциального уравнения (24) . В качестве ядра для нового уравнения выберем функцию (25) , симметричную относительно своих аргументов x и s . Умножим уравнение (1) на K(x,s,l o (v o t)) и проинтегрируем по x в пределах от l o (v o t) до l(0):
l (o) l (o)
P f +\дd Z(s,t) Ъ w f Л\д2Z(sth g J K{x,s,lo{vot))l —dt2g]ds = ES J K(x,sMvot)) —7x2— ds.
l 0 ( v 0 t ) l 0 ( v 0 t )
Выполнив интегрирование по частям в правой части данного уравнения и приняв во внимание выражения (25) и граничные условия (2) и (14) , получим интегро-дифференциальное уравнение (24) .
Применим δ -функцию Дирака и обозначим:
p(x) = p+m6(x - l(0)).
Здесь p(x) — обобщенная функция распределения веса каната с сосредоточенным на конце грузом массой m. Уравнение (24) с учетом (26) становится следующим:
l (o)
Z(x^t) = - j l0 (v0 t)
p(s) Гd 2 Z (s,t)
K (x,s,l o (v o t))— —--g g L ot2
ds+
t
+ / (io (voz)-Z(o (voz м .., . Ft(27)
∂x∂x
При отсутствии проскальзывания (Al o =0, Al ’ = 0) уравнение (27) преобразуется к виду:
l(0)t f"s>[ dZ (s^t dZ (lo(voZ),Z)
z{x,t) = — j K(x,s,l o (vot))~g— —dt 2 g ds+j -----dX-----l o (voz)dz+F o {^ot).
l0(v0t)0
Введем в (27) новую функцию:
Z (x,t) = V (x,t) + Z (l o (vot),t) =
t
= V (x,t)+ f dz ),z) (l' (voz)-Al’ (voz))dz+Alo№ "Z' ' ,' ■ F - ,(28)
∂x∂x
где V(x,t) удовлетворяет граничному условию:
V (l o (v o t),t) = O.
Заметим, что —— ( 0 ) , ) = ^^(-L),}. с учетом последнего после преобразований получим:
∂x∂x
t
Z(x,t)= V(x,t)+ d'V"' (10(-oZ)-Al'oЫ)K+^lo(M"V ' ,' ' f ' •
∂x∂x
о
Подставив (28) и (29) в (27) и выразив V(x,t), придем к интегро-дифференциальному уравнению, описывающему колебания каната грузоподъемной установки с учетом проскальзывания:
i(o)2
d ( dV(loM,t) ,
+л(— d —lo(- o t)+
V(x,t) = - / K(x,s,l o (- o ')) p ( s ) ^V ;^
J g L dt lo(vot)
+Alo (— o ')
d2V (lo(-ot),t)A 1,
-----я + F o (w o t ) I-g ds.
∂x∂t
Правая часть уравнения (30) имеет вполне определенный физический смысл. Слагаемые описывают: – влияние сил инерции ненамотанной части каната и груза на деформирование каната
l (0)
I , w P(s) d 2 V (s,t)
-
- J к ( x,s,l o ( - o t )) — —— ds;
l 0 ( v 0 t )
– ограничения, налагаемые на скорость каната в точке навивки его на барабан
l (0)
-
- / K (x,s,l o (- o ty)' d- ( dV(l 0 l ‘ (- o t)^ds;
g dt ∂x l0 (v0t)
– вклад динамических процессов в точке набегания каната на барабан
l (0)
Г 7 / P ( s ) d ( Л1 < d 2 2 V ( l 0 ( v 0 t'),t')
-
- K(x,s,l o (v o t ))--- [Avo^A ----——---- ds
g dt ∂x∂t l0 (v0t)
(это дополнительное слагаемое появляется при наличии неинтегрируемого граничного условия (15); при неподвижной границе (l 0 (- 0 t) = 0) оно не исчезает из уравнения (30) , поскольку учитывает проскальзывание каната по неподвижной поверхности барабана в точке набегания. Слагаемое пропадает при устранении проскальзывания, например, посредством введения в систему прижимного ролика);
– деформирование каната, вызванное собственным весом и весом груза
l (0)
У K(x,s,l o (v o t)')p(s')ds.
-
l 0 ( v 0 t )
-
4. Приближенное решение задачи о колебаниях каната грузоподъемной установки без учета проскальзывания
С помощью модели (30) можно рассчитывать резонансные свойства несущих звеньев широкого круга грузоподъемных машин.
Сначала решим задачу без учета проскальзывания. В этом случае уравнение (30) выглядит следующим образом:
l (0)
\ I i w p(s) d 2V (s,t) d d 9V (1о(-оА,А. . . Л ,
V(x,t) = - / K(x,s,lo(voty)-^~ — + т -----я-----~l o (- 0 1)+ Fo(^ot) ]~gds. (31)
J g [ dt2 dt \ dx / l0 (v0t)
Применим к (31) приближенный метод построения решений интегро-дифференциальных уравнений [19 –21] совместно с методом Канторовича–Галеркина [14 –18] . Введем безразмерные переменные:
£ = wox/a, т = ^ot+(^oLo-a)/vo, и новую функцию:
V (x,t) = U ( £,t ).
После их подстановки в (31) и преобразований получим интегро-дифференциальное уравнение в безразмерном виде:
U ( £,t )
ℓ 0
= -в J K(£,д,ет )
ℓ ( ε 0 τ )
U tt (S,T )+ H tt ( t ) - ^ dg -yK (£,1 о ,ет ) U tt (l o ,T )+ H tt ( t ) -^ ω 0 ω 0
Здесь K(£,д,ет ) = (w o ES/a)K(x,s,l o (v o t)) =
g — 1(ет ), £ — 1(ет ),
ς ⩽ ξ, ς ⩾ ξ,
— симметричное по ξ и ς ядро, зависящее
от времени через параметр ет , где е = — v 0 /a; 1(ет ) = 1 + ет ; 1 0 = w 0 l(0)/a; p(q ) = р + (mw 0 /a~)6(q — 1 0 );
τ
F n (T ) - е / U ^ (l(eZ ),Z )l ‘ (еZ )dZ ); F n (T )
= F o ( t — y o ) ; Y o = (a — w o L o )/v o ; в = 1/(Sg);
γ 0
Y = mw 0 (ESg).
Примем: Fn(T) = B cos Wn(T), где Wn(T) — функция класса C2, B — постоянная величина. Члены, содержащие коэффициенты е2, и члены вида еF'n (т), влияющие на резонансные свойства системы как члены порядка ε2, исключим из рассмотрения. Выполнив преобразования, аналогичные проделанным в [26], и использовав асимптотический метод [21], придем к выражению для амплитуды колебаний, соответствующих n-й динамической моде:
A 2 (т ) = E 2 (т )
У F n (Z)^ n (Z)dZ + 0
У F n (Z )sin Ф n(Z )dZ
где
Е П ( t ) = —, F n (Z ) = — B - y^n, Фп^ )= W n (Z ) — W n (Z ), nn l{еZ)
τ
πn k ES πn k
“ 0 n (ET>= ugg +n? k =mw? w n (z ^J “ 0 n (EZ )dz =тln(1+£T)+nr
Прибегнем к методике и алгоритмам из [26] и рассмотрим явление установившегося резонанса (то есть изменение частоты внешней силы и одной из собственных частот становятся согласованными таким образом, что создаются наилучшие условия для резкого увеличения амплитуды) и прохождение системы через резонанс (когда в течение конечного промежутка времени резко увеличивается амплитуда, а мгновенная частота одного из собственных колебаний проходит через значение возмущающей частоты) [17] . Амплитуда при установившемся резонансе рассчитывается как
τ
А п (т ) = b/ -1- dZ.
1+еZ
Если W n (т ) = т , то в области, содержащей точку т 0 = (1/е)(пп — 1), наблюдается прохождение через резонанс. Максимально возможная амплитуда определяется формулой:
А П ( т 1 ,т 2 )= Е П (т 2 )
У F n (Z )cosФ n (Z )dZ +
У F n (Z )sin Ф n(Z )dZ
τ 1
где τ 1 , τ 2 — границы области резонанса.
Выражение (34) было исследовано на достижение максимума численно, при помощи авторского программного комплекса «TB–ANALYSIS–7» [27] . На рисунке 1 показан скрин окна программного комплекса, на котором изображен график максимальной амплитуды продольных колебаний каната, возникающих при прохождении системы через резонанс на 1-й (верхняя кривая) и 2-й (нижняя кривая) динамических модах, как функции относительной скорости движения границы.
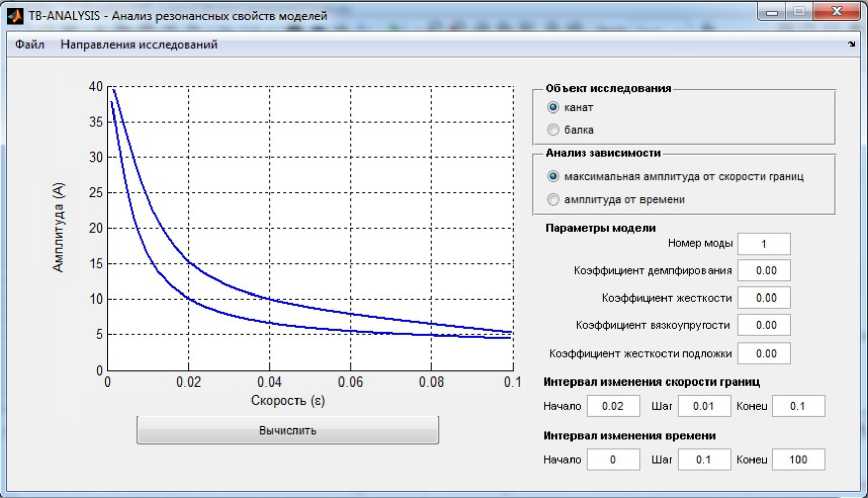
Рис. 1. Зависимость максимальной амплитуды колебаний каната от ε – относительной скорости движения его границы, на 1-й (верхняя кривая) и 2-й (нижняя кривая) динамических модах при прохождении системы через резонанс
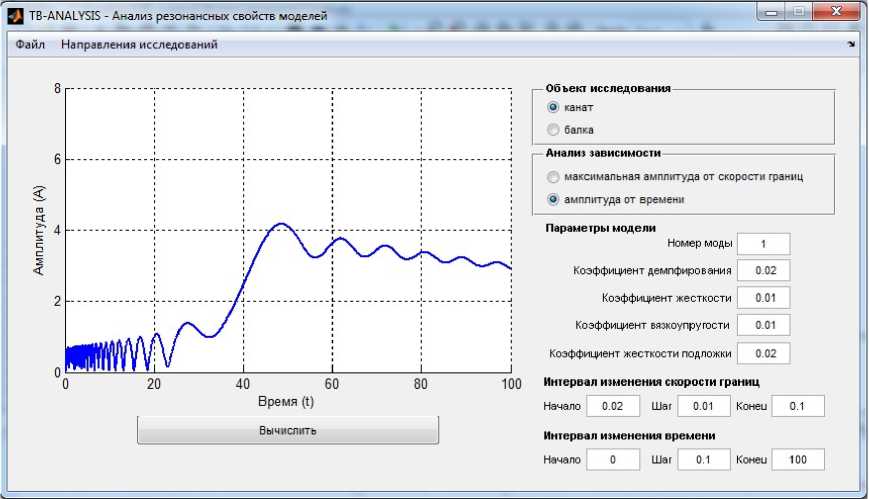
Рис. 2. Зависимость амплитуды колебаний от времени на 1-й динамической моде в резонансной области
На рисунке 2 представлен скрин окна программного комплекса, на котором изображен график зависимости от времени амплитуды колебаний каната при прохождении системы через резонанс на 1-й динамической моде.
Проанализируем связь максимальной амплитуды колебаний при прохождении системы через резонанс на 1-й и 2-й динамических модах, а также положения границ резонансной области с относительной скоростью движения границ в исследуемой задаче, описываемой как (33) . Задача была решена как аналитически (точно/exactly) [28, 29] , так и численно/approximately (см. выражение (36)) при отсутствии проскальзывания. Результаты решений сведены в таблицу 1.
Анализ данных из таблицы 1 позволяет заключить, что скорость движения границ влияет на резонансные свойства системы, а также оценить погрешность предложенного приближенного подхода к решению. Представленные параметры свидетельствуют, что максимальное отличие между точными и приближенными значениями, а значит, и погрешность метода построения решений интегро-дифференциальных уравнений, не превышает 5% при е < 0.37, что подтверждает его применимость для анализа задач, связанных с колебаниями объектов с движущимися границами, в достаточно широких диапазонах скоростей движения границ [19, 20] .
Таблица 1. Зависимость величин A n , τ 1 , τ 2 от относительной скорости движения границы ε и при прохождении системы через резонанс на 1-й и 2-й динамических модах без учета проскальзывания
|
ε |
0.01 |
0.10 |
0.20 |
0.30 |
0.40 |
|
|
1-я мода |
A 1exact |
23.99 |
7.61 |
5.33 |
4.34 |
3.71 |
|
A 1approx |
24.00 |
7.72 |
5.49 |
4.50 |
3.87 |
|
|
τ 1exact |
223.07 |
13.62 |
4.33 |
1.72 |
0.41 |
|
|
τ 1approx |
224.08 |
13.49 |
4.29 |
1.64 |
0.38 |
|
|
τ 2exact |
320.54 |
44.14 |
26.10 |
19.29 |
15.89 |
|
|
τ 2approx |
319.92 |
43.89 |
25.60 |
18.92 |
15.13 |
|
|
2-я мода |
A 2exact |
16.94 |
5.34 |
3.82 |
3.08 |
2.70 |
|
A 2approx |
16.95 |
5.49 |
3.95 |
3.20 |
2.82 |
|
|
τ 1exact |
599.48 |
46.66 |
19.55 |
10.97 |
6.81 |
|
|
τ 1approx |
600.37 |
46.48 |
19.29 |
10.60 |
6.44 |
|
|
τ 2exact |
735.41 |
89.91 |
50.06 |
35.82 |
28.12 |
|
|
τ 2approx |
735.92 |
89.53 |
49.43 |
34.93 |
27.12 |
-
5. Численное решение задачи о колебаниях каната грузоподъемной установки с учетом проскальзывания
Решим задачу в форме (30) и учтем проскальзывание. Воспользуемся безразмерными переменными (32) и численным методом, интегрированным в программный комплекс «TB–ANALYSIS–7» [27] . Численный метод имеет в основе разностные схемы, применимые для решения нелинейных задач, описывающих продольно-поперечные колебания объектов с подвижными границами. Так, задача Коши разрешима для систем интегро-дифференциальных уравнений, в том числе с неинтегрируемыми граничными условиями.
В соответствии с численным методом, по временной координате процесс колебаний представим в виде равноотстоящих временных слоев. В пределах каждого временного слоя расчетную область разделим на фиксированное число участков одинаковой длины. Вследствие движения границ шаг по координате в разных временных слоях может отличаться. Такое разбиение позволяет избежать перехода движущейся границы через координатные узлы сетки. Для вычисления аппроксимации, что и в [27].
функций и их производных применим те же разностные
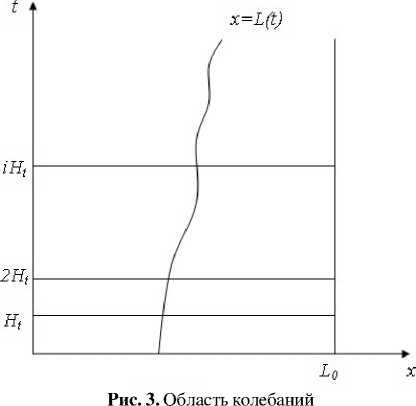
Исследуемая область колебаний изображена на рисунке 3. Здесь приняты обозначения: x — пространственная координата; t — время; L (t) — закон движения границы; i, j — номера узлов сетки; H t — шаг сетки по времени. В дискретизации по времени узлы сетки имеют индекс i (i = 0,1,2,...) и соответствующие значения времени t i = iH t . Временные слои слева от движущихся границ разобьем на Nl частей с шагом Hl i = L(t i )/Nl, а справа — на Np частей с шагом Hp i = (L 0 - L(t i' )')/Np. По оси x узлы пометим индексом j , который слева от движущейся границы изменяется от 0 до Nl, а справа — от Nl до N (N = Nl+ Np)
Назовем применяемую разностную схему схемой с переменным шагом по пространственной переменной, так как во временных слоях шаги Hl i и Hp i различны. Координаты x узлов сетки определим следующими равенствами:
(xi j = Hl i x j, 0 ^ j ^ Nl;
{ x ij = Hl i x Nl+Hp i x (j - Nt), Nl < j < N.
Обозначим как uk (xij ,ti) значения искомых функций в узлах сетки. Фрагмент сетки изображен на рисунке 4. Значения функций во временных слоях ti найдем последовательным переходом от одного слоя к другому, пользуясь конечно-разностным методом. Согласно итерационной процедуре на его основе, по известным значениям искомых переменных на временных слоях ti-1 иti определим их значения на следующем слое ti+1. Внутри этого временного слоя cначала вычислим значения функций во внутренних узлах новой сетки через разностные аппроксимации исходных уравнений, интерполированных полиномами Лагранжа, для согласования с предыдущими слоями из-за подвижности сетки. Затем установим значения на движущейся границе каната из граничных условий с помощью односторонних разностных производных. После этого рассчитаем все необходимые производные в новом слое ti+1 через разностные аппроксимации значений функций в узлах сетки. Этот цикл повторим на последующих временных слоях промежутка моделирования. В пределах слоя для определения функций и их производных используем аппроксимации с точностью до членов 2-го порядка малости относительно Hli , Hpi , Ht . Это позволяет отыскать решение задачи при любом значении времени t.
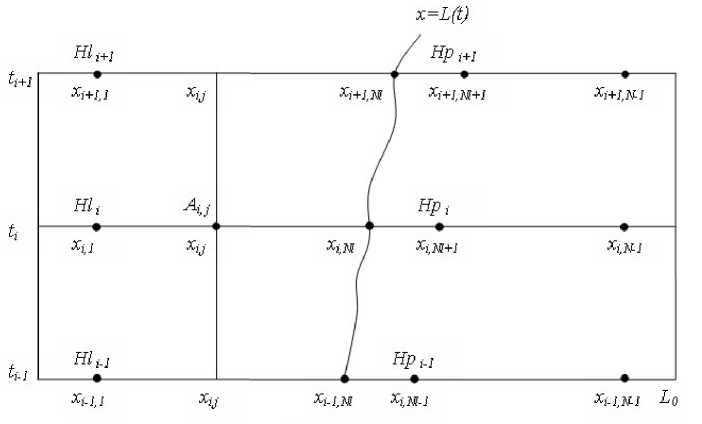
Рис. 4. Фрагмент расчетной сетки
Для реализации вычислений прибегнем к программному комплексу «TB–ANALYSIS–7», разработанному в среде MATLAB. Результаты с учетом проскальзывания сведем в таблицу 2. Из таблицы видно, что при прохождении системы через резонанс амплитуда колебаний каната грузоподъемной установки с учетом проскальзывания является оценкой сверху для амплитуды без учета проскальзывания.
Таблица 2. Зависимость величин A n , τ 1 , τ 2 от относительной скорости ε при прохождении системы через резонанс на
1-й и 2-й динамических модах с учетом проскальзывания
|
ε |
0.01 |
0.10 |
0.20 |
0.30 |
0.40 |
|
|
1-я мода |
A 1N um |
25.38 |
8.76 |
5.47 |
4.72 |
4.24 |
|
τ 1N um |
238.57 |
14.83 |
4.29 |
1.85 |
0.51 |
|
|
τ 2N um |
342.48 |
47.53 |
27.43 |
20.74 |
17.45 |
|
|
2-я мода |
A 2N um |
18.43 |
5.41 |
4.19 |
3.40 |
2.79 |
|
τ 1N um |
641.84 |
49.23 |
20.42 |
11.24 |
7.89 |
|
|
τ 2N um |
785.43 |
93.80 |
55.89 |
38.38 |
28.02 |
-
6. Выводы
В проведенном исследовании применен разработанный авторами подход к решению задачи продольных колебаний каната грузоподъемного устройства с учетом важного фактора — проскальзывания каната по поверхности барабана и построена соответствующая математическая модель. Поставленная неклассическая задача с движущимися границами и неинтегрируемыми граничными условиями сводится к интегро-дифференциальному уравнению с симметричным зависящим от времени ядром и перемененными пределами интегрирования. При отсутствии проскальзывания с приемлемой точностью получено приближенное решение методом, сочетающим метод построения решений интегро-дифференциальных уравнений и метод Канторовича–Галеркина. Для полного исследования системы с проскальзыванием использован специализированный авторский программный комплекс, реализующий разностную схему с переменным шагом по пространственной переменной.
Полученные результаты демонстрируют существенное влияние проскальзывания на резонансные характеристики системы. Установлено, что учет проскальзывания приводит к увеличению амплитуды колебаний по сравнению со случаем «идеального» контакта каната с барабаном. Анализ явления установившегося резонанса и прохождения системы через резонанс выявил отличия в зависимостях амплитудных характеристик от относительной скорости движения границы для разных динамических мод.
Разработанная математическая модель и примененный подход представляют практическую ценность для расчета и оптимизации динамических характеристик грузоподъемных устройств, поскольку позволяют более точно прогнозировать их поведение в резонансных режимах. Полученные результаты дают возможность на этапе проектирования предотвратить возникновение продольных колебаний значительной амплитуды в несущих элементах грузоподъемных установок, а также открывают перспективы для дальнейших исследований, в том числе с учетом нелинейных свойств применяемых материалов, поперечных колебаний каната и другого. Приведенные решения могут быть использованы при изучении колебаний механических объектов с движущимися границами, например, таких как рассматриваемые в [30–33].
