Об определении потребной конфигурации беспилотного летательного аппарата с изменяемой структурой

Автор: Пантилеев Андрей Сергеевич, Федоров Виктор Борисович
Рубрика: Краткие сообщения
Статья в выпуске: 33 (292), 2012 года.
Бесплатный доступ
Рассматривается задача создания математической модели движения беспилотного летательного аппарата (БПЛА) с изменяемой в полете структурой. Приводится перечень основных проектных параметров и проводится численный эксперимент для определения конфигурации, удовлетворяющей условию выполнения маневра при низких скоростях полета.
Динамика движения системы твердых тел, парашютирующая посадка
Короткий адрес: https://sciup.org/147151584
IDR: 147151584 | УДК: 629.12.053.13
On the determination of the required configuration of the unmanned aerial vehicle with variable structure
The problem of creating a mathematical model of the motion variable UAV in flight structure. A list of key design parameters and the numerical experiment is conducted to determine the configuration satisfying the maneuver at low speeds.
Текст краткого сообщения Об определении потребной конфигурации беспилотного летательного аппарата с изменяемой структурой
В настоящее время ведутся работы по исследованию повышения маневренности летательных аппаратов. В качестве объекта исследования выступает летательный аппарат, выполненный по нормальной схеме с неподвижным крылом, в зарубежной литературе принят термин «fixed-wing». Рассматривается процесс движения на этапе посадки. В работе [1] такой маневр описывается как парашютирующая посадка. Аппарат во время такого маневра «проваливается» на некоторую высоту, а затем происходит выравнивание и приземление. Нагрузка на шасси в момент касания земли значительная, но при этом удается выйти к точке приземления с минимально возможными горизонтальными и вертикальными скоростями. Выполнение маневра парашютирующей посадки без существенных повреждений летательного аппарата осуществляется летчиками высокой квалификации.
В работах [2, 3] принят термин «perched landing» дословно означающий «посадка на жердочку», так авторы обозначают посадку на некоторую опору таким образом, что в момент непосредственно приземления вертикальная и горизонтальная скорости движения аппарата равны нулю или близки к ней. Это определение близко по смыслу к парашютирующей посадке и можно говорить об эквивалентном использовании терминов. Заключительным этапом маневра, в зарубежной литературе получившим название «post stall», парашютирующей посадки является гашение вертикальной и горизонтальной скоростей путем вывода аппарата на критические и закритические углы атаки. При этом значительно возрастает сила сопротивления и падает подъемная сила крыла, однако устойчивое движение на этих режимах возможно, о чем свидетельствуют исследования, опубликованные в работах [3, 4].
Существует несколько подходов для математического описания процесса выполнения парашютирующей посадки. Первый уровень сложности – это идеальное представление процесса, когда летательный аппарат представляется материальной точкой, движущейся под действием аэродинамических и инерционных сил [2]. На этом уровне представления автор не предлагает технического решения, позволяющего обеспечить требуемый маневр.
На втором уровне сложности используются математические модели, описывающие движение летательного аппарата как твердого тела [3, 4]. Так же как и на предыдущем уровне сложности, математическое представление коэффициентов подъемной силы и силы сопротивления представлены зависимостью от угла атаки а в следующем виде:
С y = sin 2 а ;
C x = |sin а|.
Первые два уровня дают общее представление о поведении летательного аппарата на этапе парашютирующей посадки и хорошо согласуются с экспериментом [4].
Одна из главных проблем, с которой приходится сталкиваться на этапе взлета или посадки, это малые скорости полета. На скоростях, близких к критическим, аэродинамические органы управления мало эффективны, в этом случае есть возможность использовать внутреннюю энергию. Используя закон сохранения кинетического момента можно обеспечить управление БПЛА. Изменяемая в полете структура реализуется путем взаимодействия взаимосвязанных платформы и подвижного груза. Платформа – это основная аэродинамическая поверхность аппарата, которая может быть выполнена по любой из существующих аэродинамических схем. Груз – это элемент аппарата, имеющий некоторые степени свободы относительно платформы. Изменение конфигурации БПЛА осуществляться следующим образом: платформа связана с грузом шарниром, который дает возможность грузу поворачиваться относительно его, тем самым элементы меняют положение друг относительно друга. Это позволяет управлять суммарным моментом инерции аппарата и его статической устойчивостью. По существу это решение напоминает принцип, используемый в дельтапланах, где пилот изменяет взаимное расположение несущей аэродинамической поверхности – платформы и собственного тела – груза.
В работе анализировалось влияние основных структурных параметров модели (см. таблицу) на поведение беспилотного летательного аппарата:
-
• массы первого (платформа) и второго (груз) звена, m пл и m гр , массу платформы примем постоянной и равной 10 кг, масса груза будет принимать следующие значения: 1 и 2 кг;
-
• величина выноса оси вращения груза относительно центра масс первого звена r12 - r 1 g = r vinCG , влияние выноса оси вращения на динамику движения аппарата неизвестно, поэтому на первом этапе примем следующие значения этой величины для исследования: без выноса, 0,1 и 0,2 м;
-
• величина смещения центра масс груза относительно оси его вращения r2 g , влияние смещения центра масс второго звена относительно оси его вращения также неизвестно, поэтому на первом этапе примем следующие значения этой величины для исследования: 0,1; 0,2 и 0,3 м;
-
• азимут угла поворота груза относительно продольной оси аппарата ф задавался равным нулю.
Основные структурные параметры модели
|
m гр = 2 , r vinCG = 0 |
|||||||
|
0° |
45° |
90° |
135° |
||||
|
Обозначение |
r 2 g |
Обозначение |
r 2 g |
Обозначение |
r 2 g |
Обозначение |
r 2 g |
|
m2v0a0s1 |
0,1 |
m2v0a45s1 |
0,1 |
m2v0a90s1 |
0,1 |
m2v0a135s1 |
0,1 |
|
m2v0a0s2 |
0,2 |
m2v0a45s2 |
0,2 |
m2v0a90s2 |
0,2 |
m2v0a135s2 |
0,2 |
|
m2v0a0s3 |
0,3 |
m2v0a45s3 |
0,3 |
m2v0a90s3 |
0,3 |
m2v0a135s3 |
0,3 |
|
m гр = 1 , r vinCG = 0,2 |
|||||||
|
0° |
45° |
90° |
135° |
||||
|
Обозначение |
r 2 g |
Обозначение |
r 2 g |
Обозначение |
r 2 g |
Обозначение |
r 2 g |
|
m1v2a0s1 |
0,1 |
m1v2a45s1 |
0,1 |
m1v2a90s1 |
0,1 |
m1v2a135s1 |
0,1 |
|
m1v2a0s2 |
0,2 |
m1v2a45s2 |
0,2 |
m1v2a90s2 |
0,2 |
m1v2a135s2 |
0,2 |
|
m1v2a0s3 |
0,3 |
m1v2a45s3 |
0,3 |
m1v2a90s3 |
0,3 |
m1v2a135s3 |
0,3 |
Выполнение маневра парашютирующей посадки, а особенно его заключительной части требует большого по величине управляющего момента, например, в работе [3] для этого использовался руль высоты на аппарате, выполненном по нормальной аэродинамической схеме. Однако на скоростях, близких к скорости сваливания, эффективности аэродинамических органов управления недостаточно. В этом случае возможно применение балансирного управления, впервые его использование было описано в работе [6]. Задача исследования динамики движения аппарата с балансирным управлением в механике описана как движение системы твердых тел. Дифференциальные уравнения движения системы твердых тел в приложении к движению автономных транспортных систем, состоящих из двух или более тел, ранее были получены во многих работах, в том числе [7–9]. В наиболее общем виде такие уравнения описаны в работах [10–13] и их можно представить следующим образом:
q = H и;
M (q )U = f (t, q, u) + HT (q) GT (q, t)X;
g (q, t ) = 0, где q - вектор обобщенных координат, используется для определения конфигурации системы нескольких тел в любой момент времени t; M (q) - симметричная положительно определенная матрица массы; f (q, и, t) - функция, представляет собой вклад центробежных сил, сил Кориолиса и условий внешнего воздействия; H (q) - матрица, представляющая собой кинематическую связь между переменной скоростью и, являющейся производной обобщенной координаты q, в виде и = H (q) q. Часто H является тождественным отображением. В случае пространственного движения полное представление более удобно, что позволяет избежать обычных трудностей с представлением особенностей H = HT (HHT) ; g - система алгебраических уравнений, описывающих ограничения, предполагается, что функция дважды непрерывно дифференцируемая; G – Якобиан; X - вектор множителей Лагранжа.
Численный эксперимент проводится для конфигурации аппарата с нулевым азимутом подвижного груза. Задаются начальные условия моделирования: высота полета, начальная скорость полета и соответствующие опыту структурные параметры. В модели реализован закон управления грузом, который удерживал груз в начальном положении, обеспечивая потребный момент, не допуская его отклонения более чем на 5 градусов. Общая схема численного эксперимента представлена в таблице.
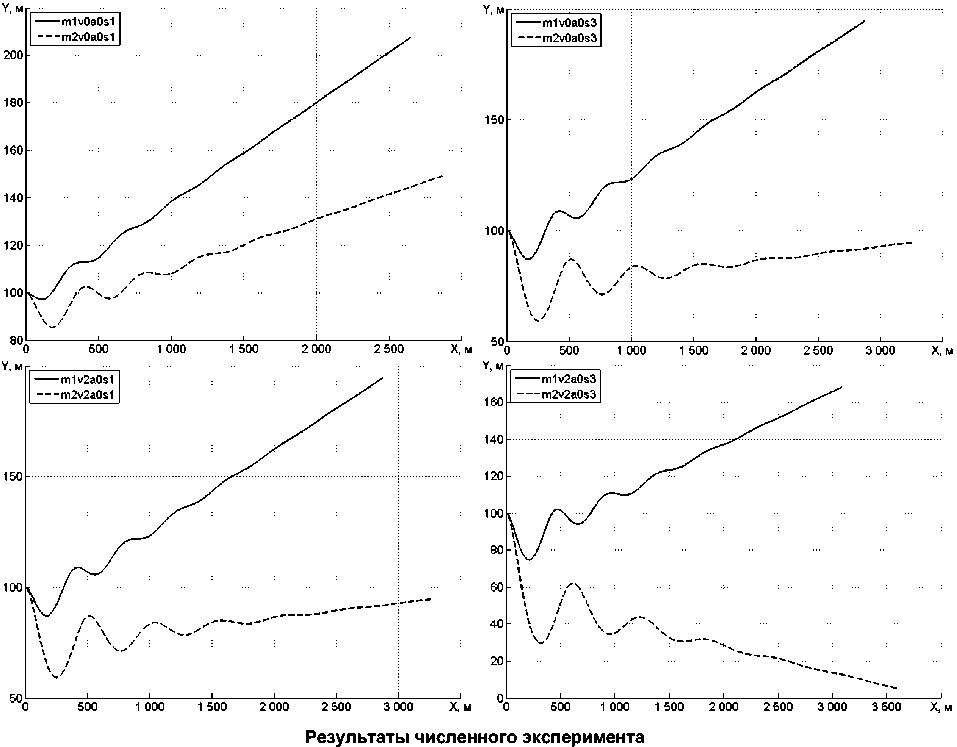
Были получены следующие зависимости: профиль полета (см. рисунок), изменение кинематических параметров – ускорение, скорость и обобщенные координаты от времени, а также величины внешних сил, возникающих в ходе движения БПЛА.
Обработка результатов эксперимента велась по профилю полета. Были определены угол наклона траектории и величина ее смещения относительно начального состояния. Выявлены конфигурации БПЛА, при которых изменение центровки приводит к возникновению пикирующего момента, это конфигурации m2v1a0s3, m2v2a0s2 и m2v2a0s3. Это конфигурации с суммарным смещением груза массой 2 кг относительно центра тяжести платформы на 0,4 м. В обозначенных конфигурациях есть возможность осуществлять управление величиной суммарного момента, действующего на БПЛА, путем перемещения подвижного груза на заданную величину. Это дает возможность осуществлять управление летательным аппаратом в условиях низких скоростей. Для того чтобы экспериментально подтвердить исследуемый эффект, значение относительного момента инерции должно лежать в интервале от 1,11 до 1,21 относительных единиц момента инерции, т. е. отнесенных к моменту инерции летательного аппарата без балансировочного груза.
Список литературы Об определении потребной конфигурации беспилотного летательного аппарата с изменяемой структурой
- Висленев, В.В. Теория авиации/В.В. Висленев, Д.В. Кузьменко. -4-е изд., испр. -М.: Гос. воен. изд-во Наркомата обороны Союза ССР, 1939. -384 с.
- Crowther, W.J. Perched landing and takeoff for fixed wing UAVs/W.J. Crowther//NATO AVT Symposium on Unmanned Vehicles for Aerial, Ground and Naval Military Operations, 9-13 October 2000, Ankara, Turkey.
- Wickenheiser, A.M. Dynamics and trajectory optimization of morfing aircraft in perching maneuvers: PhD dissertation/A.M. Wickenheiser. -Cornell University, 2008.
- Rick, E. Cory. Supermaneuverable Perching: PhD dissertation/E. Rick. -Massachusetts Institute of Technology, 2010.
- Sim, A.G. Flight characteristics of a modified Schweizer SGS 1-36 Sailplane at low and very high angles of attack/A.G. Sim. -NASA TP-3022, Й-1563, NAS 1.60:3022, July 1990, 91N10079.
- Лилиенталь, О. Полет птиц как основа искусства летать/О. Лилиенталь. -М.; Ижевск: Ин-т компьютерных исследований, 2002. -232 с.
- Пантилеев, А. С. Постановка задачи оптимального захода на посадку беспилотного летательного аппарата с изменяемой в полете структурой/А.С. Пантилеев//Вестник ЮУрГУ. Серия «Компьютерные технологии, управление, радиоэлектроника». -2010. -Вып. 12. -№ 22 (198). -С. 43-46.
- Integrated Guidance and Control of Moving Mass Actuated Kinetic Warheads/P. Menon, G. Sweriduk, E. Ohlmeyer, D. Malyevac//J. Guid. Control Dyn. -2004. -Vol. 27(1). -P. 118-127.
- Woolsey, C.A. Moving mass control for underwater vehicles/C.A. Woolsey, N.E. Leonard//Proceedings of the American Control Conference, 2002. -P. 2824-2829.
- Hang, E.J. Computer Aided Kinematics and Dynamics of Mechanical Systems/E.J. Hang//Vol. 1: Basic Methods, Allyn and Bacon. -1989.
- Schiehlen, W.O. Multibody System Handbook/W.O. Schiehlen. -Springer-Verlag, 1990.
- Виттенбург, Й. Динамика систем твердых тел/Й. Виттенбург. -М.: Мир, 1980. -292 с.
- Wood, G.D. Simulating mechanical systems in Simulink with SimMechanics/G.D. Wood//The MathWorks Inc., 2002. -www.mathworks.com.
