Обеспечение стабильного функционирования дисковых бункерных загрузочных устройств для асимметричных заготовок

Автор: Е.В. Пантюхина, А.Л. Бахно, С.А. Васин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 3 т.28, 2026 года.
Бесплатный доступ
В статье рассматриваются основные направления разработки конструктивных ограничений на параметры органов захвата и ориентирования механических дисковых бункерных загрузочных устройств при исследовании их функциональных возможностей на ранних этапах проектирования. Представлены в виде математических выпадений диапазоны конструктивных параметров органов захвата и ориентирования при пассивном и активном способах ориентирования при захвате заготовок радиальными карманами в положениях заготовок лежа и стоя, а также тангенциальными карманами в положении заготовок лежа, которые учитывают влияние геометрических параметров заготовок во взаимосвязи с конструктивными параметрами бункерных загрузочных устройств. Приведенные диапазоны основных параметров рабочих органов, участвующих в процессах захвата и ориентирования асимметричных заготовок формы тел вращения, гарантированно позволят правильно выбрать значения указанных параметров и обеспечить стабильное функционирование бункерных загрузочных устройств при проектировании.
Бункерное загрузочное устройство, вероятность захвата, ориентирование заготовок, конструктивные ограничения, стабильность функционирования
Короткий адрес: https://sciup.org/148333834
IDR: 148333834 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2026-28-3-206-213
Ensuring Stable Operation of Disk Hopper Feeders for Asymmetric Workpieces
The article discusses the main directions of development of structural limitations on the parameters of the gripping and orientation organs of mechanical disk hopper feeders when studying their functionality at the early stages of design. Ranges of structural parameters of gripping and orienting members at passive and active methods of orienting at gripping of workpieces by radial pockets in positions of workpieces lying and standing, and also by tangential pockets in position of workpieces lying, which take into account influence of geometric parameters of workpieces in relationship with structural parameters of hopper feeding devices, are presented in the form of mathematical drops. The given ranges of the main parameters of the working elements involved in the processes of gripping and orienting asymmetric workpieces of the shape of solids of revolution are guaranteed to make it possible to correctly select the values of these parameters and ensure stable functioning of the hopper feeders during design.
Текст научной статьи Обеспечение стабильного функционирования дисковых бункерных загрузочных устройств для асимметричных заготовок
Разнообразие асимметричных заготовок в различных отраслях промышленности требует для каждого конкретного случая разработки стабильных и производительных систем их автоматической загрузки к технологическому оборудованию, выполняющему различные операции производственного процесса [1, 2]. Небольшие по размерам и массе заготовки формы тел вращения загружаются системами на базе механических дисковых бункерных загрузочных устройств (БЗУ), которые приводят в требуемое ориентированное положение единичные заготовки из общей массы их навала в бункере устройства [3].
Традиционные БЗУ, спроектированные в советское время, применяются для заготовок с явной асимметрией формы, смещения центра масс, являются уникальными, то есть используются для конкретной заготовки с конкретными параметрами и формой [4].
В последние десятилетия разрабатываются их усовершенствованные версии. Такие БЗУ могут позволять ориентировать и заготовки с неявной асимметрией [5], могут быть универсальными, которые путем регулировки или замены рабочих органов могут подстраиваться под различные типоразмеры и формы заготовок [6].
В проектировании механических дисковых БЗУ особое место занимает научно-исследовательский блок, который включает разработку конструктивных ограничений на органы захвата и ориентирования БЗУ и разработку математических моделей вероятности захвата заготовок в БЗУ для описания его производительности [7]. Каждый из двух представленных этапов выполняется не только для обеспечения эффективной эксплуатации БЗУ, в процессе которой из БЗУ будут выданы только правильно сориентированные заготовки, а производительность их выдачи будет максимальной, но и для того, чтобы на ранних этапах проектирования точно спрогнозировать указанные параметры.
ОСНОВНЫЕ НАПРАВЛЕНИЯ РАЗРАБОТКИ ОГРАНИЧЕНИЙ НА ПАРАМЕТРЫ ОРГАНОВ ЗАХВАТА И ОРИЕНТИРОВАНИЯ ПРИ РАЗЛИЧНЫХ СПОСОБАХ
ния (пассивное или активное). При этом радиально расположенные карманами могут захватывать заготовки как в положении лежа (например, БЗУ с радиальными карманами) (рис. 1, а), так и в положении стоя (например, БЗУ с зубьями) (рис. 1, б), а тангенциально расположенные карманы только в положении лежа (например, БЗУ с тангенциальными карманами и гребенкой) - (рис. 1, в).
Г д
Рис. 1. Схемы БЗУ с радиально расположенными карманами и захватом заготовок в положении лежа (а), в положении стоя (б) и тангенциально расположенными карманами в положении лежа (в) с пассивным (г) и активным (д) ориентированием
Для обеспечения стабильного функционирования дисковых БЗУ необходимо разработать конструктивные ограничения исходя из нижеследующего. Во-первых, карман должен захватить заготовку в правильном положении полностью и с наиболее высокой вероятностью. Во-вторых, в карман не должна запасть вторая заготовка. В третьих, при пассивном ориентировании неправильно запавшие в карманы заготовки должны выпадать из карманов, а правильно запавшие - надежно в них удерживаться, а при активном ориентировании все запавшие в карманы заготовки должны переориентироваться в требуемое положение и быть в этом положении выданы из БЗУ [7].
Рассмотрим особенности разработки конструктивных ограничений на параметры захватывающих и ориентирующих органов различных типов БЗУ в зависимости от реализуемых в них способов захвата и ориентирования.
БУНКЕРНЫЕ ЗАГРУЗОЧНЫЕ УСТРОЙСТВА С РАДИАЛЬНЫМИ КАРМАНАМИ
Пассивное ориентирование заготовок, заготовки в положении лежа. Рассмотрим основные этапы разработки конструктивных ограничений на примере усовершенствованного БЗУ с радиальными прямоугольными карманами, кольцевым ориентатором и гребенкой (рис. 2) [8].
Во-первых, карман должен захватить заготовку в правильном положении полностью и с наиболее высокой вероятностью. Тогда длина кармана ограничена условиями полного проникновения в карман заготовки, движущейся асимметричным торцом (наименьшим диаметром d 2), и невозможностью полного проникновения заготовки, движущейся в карман цилиндрическим торцом:
-
l 1 < l ê ≤ l - d 1 sin β
где угол в , равный половине угла при вершине асимметричного торца, d y , l y - диаметр и длина наибольшего торца заготовки.
Конструктивные размеры кольцевого ориен-татора должны способствовать проникновению в его паз только заготовок, движущихся асимметричным торцом. На основании изложенного глубина паза кольцевого ориентатора принимается равной dy, а угол при вершине кольцевого ориентатора должен находиться в диапазоне
2 arccos
d I
[ fdI2 + к - dI )2 J
< ак < 2р ,
Рис. 2. Схема БЗУ с радиально расположенными карманами и пассивным ориентированием с захватом заготовок в положении лежа
где L – длина кармана, определяемая как L = d 1 + lk .
Высота кармана принимается равной d 1 , что позволит полностью погрузиться в карман и не выпасть из кармана.
Во-вторых, в карман не должна запасть вторая заготовка. Ширина кармана ограничена данным условием d y < bK < d y + A , а значение величины зазора Д может быть значительно больше области его традиционно рекомендуемых значений, так как захватывающий орган не осуществляет ориентирование.
Наибольший размер n паза кольцевого ориентатора в сечении должен выбираться из условия d 1 cos в < n < d i .
На рис. 3, а приведены диапазоны рабочих значений длины кармана в выбранных с учетом геометрических особенностей заготовок при длине заготовки 0,03 м, на рис. 3, б – диапазоны рабочих значений угла при вершине кольцевого ориентатора при значении коэффициента зазора Д 1 = 0,15, на рис. 3, в – диапазоны рабочих значений длины n его паза.
Длина кармана должна находиться в рабочей зоне, нижняя граница которой описана размером l k min , а верхняя - l k max и определяется в зависимости от коэффициентов a = d i / 1 , c = d 2 / 1 ; угол при вершине кольцевого ориентатора должен находиться в рабочей зоне, верхняя граница которой описана углом a k max , одинаковым для всех заготовок, а нижняя - углом a k min ; длина размера n паза кольцевого ориентатора должна находиться в рабочей зоне, верхняя граница которой описана длиной n max , одинаковой для всех заготовок при указанной длине, а нижняя – n min , определяется в зависимости от заменяющего коэффициента.
Рис. 3. Результаты математического моделирования рабочей зоны длины кармана (а), угла при вершине (б) и наибольшего размера паза (в) кольцевого ориентатора
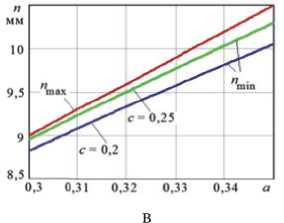
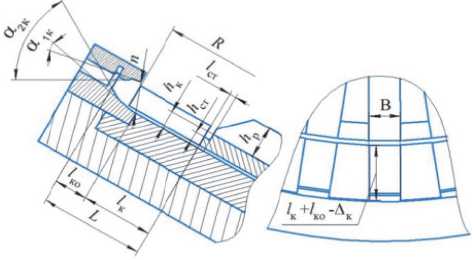
Рис. 4. Схема БЗУ с радиально расположенными карманами и активным ориентированием с захватом заготовок в положении лежа
В третьих, при пассивном ориентировании неправильно запавшие в карманы заготовки должны выпадать из карманов, а правильно запавшие – надежно в них удерживаться. Радиальные пазы должны способствовать беспрепятственному выпадению из паза заготовок, завершающих пассивное ориентирование. При этом заготовки не должны западать во впадины гребенки, снижая скорость своего движения и увеличивая тем самым общее время пассивного ориентирования, которое может достигнуть критических значений и нарушить работу БЗУ. Поэтому выбираются параметры начального участка гребенки b 2 = l i и высота ее выступа h В = 0,5( d i - d 2 ) .
Шаг гребенки находится в диапазоне li - xc + 0,5ditg(a + P) < bi < li, где a - угол наклона вращающегося диска.
Активное ориентирование заготовок, заготовки в положении лежа. Рассмотрим основные этапы разработки конструктивных ограничений на примере усовершенствованного универсального БЗУ с регулируемым кольцевым ориентатором (рис. 4) [9].
Во-первых, чтобы карман захватил заготовку в правильном положении полностью и с наиболее высокой вероятностью необходимо правильно подобрать размеры кармана: L (длина), B (ширина) и h К (высота).
Получаем совокупность ограничений на длину L кармана:
L ^iи > l при условии, что L > lTT и L п > Р; ИНН г •/ “ к ц ко dec"
'Иах < 1 ц + d ИН и l cT+A< d ИсН ; K Ц d,CC СТ d-СС 7
, х 7 ,7 7
^ ( l K + l ст ) + h K < z •
Так принимается такое значение длины плоской части кармана l к = l ц + Д , которое удовлетворяет условиям. Ширина кармана В = d y + Д к принимается максимально возможной, так как в данном случае будет наиболее высокое значение вероятности захвата заготовки карманом. Ограничение ширины B кармана обусловлено западанием другого изделия асимметричным торцом, то есть В < d y + d ,^^п ; высота кармана принимается достаточной для захвата заготовки и не превышающей его наибольший диаметр, то есть d y > h K > 0,5 d y .
Во-вторых, чтобы регулируемый кольцевой ориентатор препятствовал захвату карманом заготовки в неправильном положении, его максимальный размер должен быть меньше максимального диаметра заготовки n max < d i . При загрузке группы заготовки параметр n будет подбираться для тоq заготовки, у которой диаметр цилиндрического торца меньше других.
Чтобы способствовать полному захвату заготовки в правильном положении глубина паза регулируемого кольцевого ориентатора должна быть больше длины асимметричного торца изделия l ко > l асс . Глубина паза ограничений по длине больше не имеет, так как не участвует в процессе захвата. Форма и угол а К внутри паза кольцевого ориентатора регулируется в зависимости от группы загружаемых изделий и его изначальный профиль выбирается по тому изделию, асимметричный торец которого имеет наибольший размер и форму.
Чтобы копир имел свободный доступ к неправильно запавшему в карман изделию для его подхвата с целью переориентирования в усовершенствованном устройстве на периферии вращающегося диска предусмотрена ступенька с параметрами l ст и h ст . Выбор данных параметров осуществляется исходя из описанных выше условий.
В-третьих, чтобы карман удерживал неправильно запавшую заготовку в верхней части бункера до начала расположения копира, предотвратив выпадение изделия из кармана, необходимо определить минимальный от вертикальной оси угол, на котором должен располагаться копир - а КОП . Для этого составляются условия статического равновесия заготовки в кармане в начальный момент времени, когда сумма моментов всех сил относительно опор, а также их проекций на оси ОY и OX равна нулю.
Пассивное ориентирование, заготовки в положении стоя. Рассмотрим основные этапы разработки конструктивных ограничений на примере БЗУ с зубьями универсального типа (рис. 4) [10].
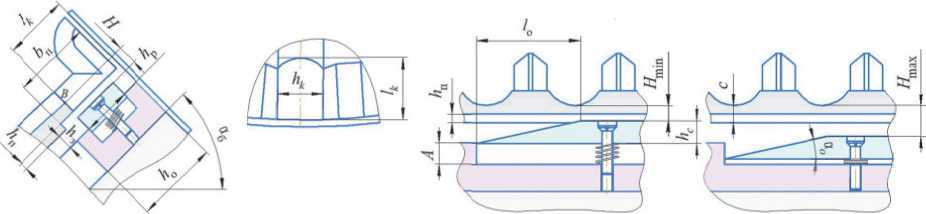
Рис. 5. Схема БЗУ с радиально расположенными карманами и пассивным ориентированием с захватом заготовок в положении стоя
Во-первых, захватывающий орган БЗУ, должен с высокой вероятностью захватить заготовку в правильном положении и удержать ее в верхней части бункера, предотвратив выпадение из кармана; ем шире карман, тем больше вероятность западания в него заготовки и тем шире возможности БЗУ при захвате заготовок в форме колпачка с различными диаметрами.
Во-вторых, в карман не должна запасть вторая заготовка. Теоретически ширина кармана может быть ограничена лишь тем, чтобы в него при наличии в нем запавшей заготовки не запала вторая заготовка и в этот момент не происходило заклиниваний, то есть d i < h k < 2 d y , при условии, что длина заготовки меньше 2 d 1 . Однако увеличение ширины кармана приведет к уменьшению количества захватывающих органов, которые можно расположить по окружности диска, что приведет к снижению производительности. Поэтому рекомендуется выбирать ширину кармана в диапазоне 1,1 d y < h k < 1,6 d y , при условии, что l < 1,6 d y .
В-третьих, при пассивном ориентировании неправильно запавшие в карманы заготовки должны выпадать из карманов, а правильно запавшие – надежно в них удерживаться. Длина кармана в зоне ориентирования должна быть выбрана так, чтобы заготовка, запавшая в карман в неправильном положении (открытым торцом), смогла выпасть из кармана, опрокидываясь на краю кармана dy + H .
Высота кармана, образованная верхней стороной регулируемого ориентатора и крайней точкой В вращающегося диска, регулируется в диапазоне Hзахв < H < HОрИент или, описав условия захвата и ориентирования заготовок получено l—xc — 0,5^^ctgOg > H > xc — 0,5^ctgOg . При этом минимальная высота кармана ограничивается высотой скругленной части дна заготовки при ее захвате, поэтому она не должна быть меньше высоты ее дна.
БУНКЕРНЫЕ ЗАГРУЗОЧНЫЕ УСТРОЙСТВА С ТАНГЕНЦИАЛЬНЫМИ КАРМАНАМИ
Пассивное ориентирование заготовок, заготовки в положении лежа. Рассмотрим основные этапы разработки конструктивных ограничений на примере усовершенствованного БЗУ с тангенциальными карманами и гребенкой (рис. 6) [11].
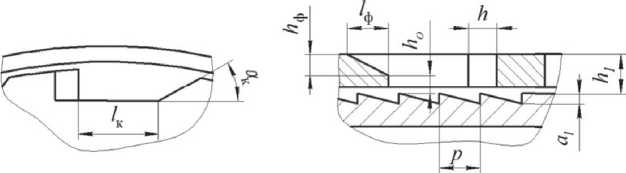
Рис. 6. Схема БЗУ с тангенциально расположенными карманами и пассивным ориентированием с захватом заготовок в положении лежа
Во-первых, чтобы карман захватывал заготовку в правильном положении полностью и с наиболее высокой вероятностью его размеры должны быть следующими. Захватывающий орган БЗУ имеет длину, находящуюся в диапазоне l j < l к < l j + А .
Во-вторых, чтобы в карман не запала вторая заготовка, высота кармана должна находиться в диапазоне 0,4 d j < h j < 0,75 d j , что обеспечит нахождение в нем правильно запавших заготовок до момента их выдачи в приемник и вторая заготовка не западет в карман одновременно с первой.
В-третьих, чтобы при пассивном ориентировании неправильно запавшие в карманы заготовки не выпадали из карманов, а правильно запавшие – надежно в них удерживались, были выбраны следующие параметры.
Для направления движения заготовок в процессе захвата и ориентирования в кармане предусмотрены фаски, размеры которых должны соответствовать выражению l ф : h ф = 1:2 . Большая грань фаски расположена со стороны западания предмета обработки в карман и имеет длину l ф = 0,5 1 . Высота кармана в верхней части бункера в месте расположения гребенки определяется как hi0 = h j — И ф .
Гребенка обеспечивает с одной стороны выброс неправильно захваченных заготовок, а с другой – беспрепятственное прохождение по ней правильно запавших заготовок. Поэтому для надежного функционирования она должна иметь следующие параметры. Шаг гребенки должен находиться в диапазоне x c < p < 0,5l . Области граничных значений допустимых размеров шага гребенки представлены в виде графиков на рис. 7.
Шаг гребенки должен находиться в рабочей зоне, ограниченной линией pmax , выше которой произойдет заклинивание заготовок, а нижняя граница определяется кривой, построенной для каждого типа заготовки в зависимости от a, c, f = l / li f. Высота гребенки должна находиться в диа-d - d^ „ - , пазоне 1 ^ 2 < ai < 0,5di.
Активное ориентирование заготовок, заготовки в положении лежа. Рассмотрим основные этапы разработки конструктивных ограничений на примере усовершенствованного БЗУ с тангенциальными карманами и переориентатором в виде ножевой опоры (рис. 8) [12].
Чтобы карман захватывал заготовку в правильном положении полностью и с наиболее высокой вероятностью его размеры должны быть следующими, чтобы в карман не запала вторая заготовка и чтобы при активном ориентировании все запавшие в карманы заготовки переориентировались в требуемое положение и были в этом положении выданы из БЗУ разрабатываются следующие ограничения.
Во-первых, в тангенциальном направлении по отношению к карману, когда одна заготовка своей боковой поверхностью лежит на другой заготовке и вместе с ней движется в верхнюю часть бункера, должно осуществляться переориентирование заготовок. Однако в данном случае процесс переориентирования нарушается, так как в радиальные карманы между ножевой опорой свалятся сразу две заготовки. При этом они могут быть не правильно сориентированы. Чтобы этого избежать необходимо, чтобы высота кармана была выбрана в диапазоне:
0,8 d 1 < H < d 1 + d1 - d 2 .
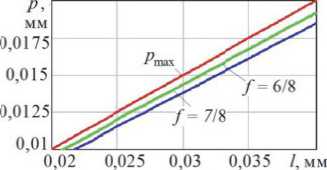
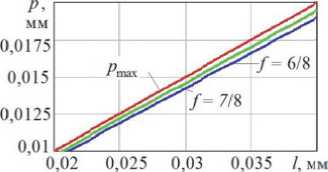
Рис. 7. Результаты математического моделирования шага гребенки для полых (а) и сплошных (б) заготовок с торцом в виде усеченного конуса
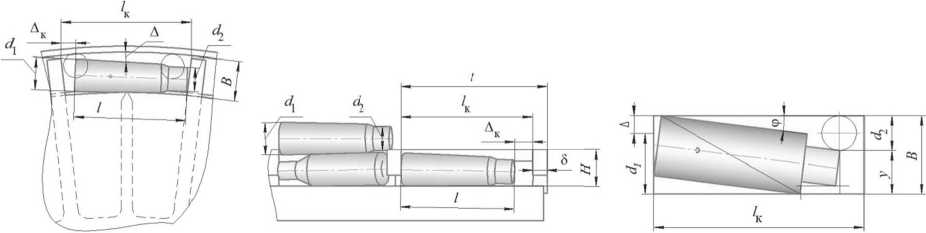
Рис. 8. Схема БЗУ с тангенциально расположенными карманами и активным ориентированиемс захватом заготовок в положении лежа
Выбор высоты в данном диапазоне позволит исключить сопровождение двух единиц в одной ячейке, которое может привести к сваливанию в карман одновременно двух заготовок, в том числе в не сориентированных положениях.
Во-вторых, в тангенциальный карман при некорректно подобранном значении зазоров Д к по длине кармана и Д по ширине кармана, заготовка может запасть одним из своих торцов, как меньшим, так и большим из диаметров (стоя) и, тем самым, нарушить процесс ориентирования. Так как минимальным для всех видов ступенчатых заготовок является диаметр d 2 , то именно по нему будут разрабатываться ограничения.
С одной стороны длина кармана должна быть больше диагонали продольного сечения заготовки. С другой стороны в карман не должна запасть стоя другая заготовка. Поэтому l + d2 > lк
>
l^ +1 d2 +
d-d ^ V
2 J
Чем больше величина зазора, тем больше вероятность западания заготовки в карман. Но его увеличение приведет к увеличению шага t тангенциальных карманов, что приведет к сокращению их количества и, тем самым, снижению производительности БЗУ. Поэтому целесообразно прини- мать минимальные значения зазора.
Учитывая то, что заготовки могут расположиться в кармане по диагонали, в кармане по его ширине может оказаться зона, куда стоя может запасть заготовка своим диаметром d2 . Поэтому при определении ширины тангенциального кармана нужно учесть то, что ее минимальное значение должно быть не менее большего диаметра заготовки. Максимальное значение ширины кармана бу дет следующим:
B max
d + d d +Д l
= d7 + —---2 cos ф - ( l - l i) • sin ф , ф = arcsin— r^= - arccos— j=^= .
2 2 1 ,/dM i[2Td
Таким образом, одним из основных направлений обеспечения стабильности функционирования механических дисковых БЗУ при загрузке асимметричных заготовок является разработка конструктивных ограничений на параметры органов захвата и ориентирования, что обеспечивается соблюдением следующих условий: карман БЗУ должен захватить заготовку в правильном положении полностью и с наиболее высокой вероятностью; в карман не должна запасть вторая заготовка; в зависимости от способа ориентирования должен стабильно реализовываться этот процесс (при пассивном ориентировании неправильно запавшие в карманы заготовки должны выпадать из карманов, а правильно запавшие - надежно в них удерживаться; при активном ориентировании все запавшие в карманы заготовки должны переориентироваться в требуемое положение и быть в этом положении выданы из БЗУ).
ЗАКЛЮЧЕНИЕ
Разработка конструктивных ограничений на параметры захватывающих и ориентирующих органов БЗУ определяется способом расположения карманов; способом захвата заготовок; способом ориентирования заготовок; параметрами заготовок и БЗУ; требуемой (максимальной) производительностью для подачи в оборудование. Она является одним из основных исследовательских этапов, реализуемых на ранних этапах при проектировании БЗУ. Обеспечение при конструировании значений параметров органов захвата и ориентирования в диапазоне их граничных значений, определяемым математическими зависимостями, гарантированно позволит обеспечить стабильное функционирование БЗУ при загрузке асимметричных заготовок в технологическое оборудование автоматизированных линий различных типов.
