Обобщенная модель курьера с дополнительными ограничениями

Автор: Ченцов Алексей Александрович, Ченцов Александр Георгиевич
Рубрика: Математическое моделирование
Статья в выпуске: 1 т.9, 2016 года.
Бесплатный доступ
Конструируется математическая модель процесса последовательного выбора вариантов перемещений и выполнения комплекса работ, осложненных взаимным влиянием действий на различных временных промежутках и условиями предшествования. Исследуется задача маршрутизации с ограничениями и функциями стоимости, включающими зависимость от списка заданий. Постановка ориентирована на решение инженерных задач, возникающих в атомной энергетике и машиностроении. В первом случае допускаются ограничения, зависящие от списка заданий, не выполненных на текущий момент и касающихся демонтирования излучающих элементов оборудования. Во втором случае возможны ограничения, связанные с обеспечением жесткости листа при резке деталей на станках с числовым программным управлением (ЧПУ); в этом случае возникает зависимость от списка уже выполненных работ. Метод решения, связанный с использованием широко понимаемого динамического программирования, излагается в форме алгоритма на функциональном уровне. При наличии условий предшествования не предусматривается построение всего массива значений функции Беллмана. Для конкретного варианта задачи, связанного с листовой резкой на машинах с ЧПУ, предлагаемый (оптимальный) алгоритм реализован на ПЭВМ; приведены результаты вычислительного эксперимента.
Маршрут, трасса, условия предшествования
Короткий адрес: https://sciup.org/147159355
IDR: 147159355 | УДК: 519.6 | DOI: 10.14529/mmp160104
Generalized model of courier with additional restrictions
Mathematical model of process of sequential choice of permutation variants and fulfilment of works complex with complication at the expense of the operations coupling on different time intervals and preceding conditions is constructed. Routization problem with constraints and costs functions depending on tasks list is considered. This formulation is oriented to the solving of engineering problems, which arised in nuclear engineering and mechanical engineering. In the first case, constraints depending on list of tasks which are not fulfilled at the current time and concerning of dismantling of the radiation equipment fragments are assumed. In the second case, constraints connected with guarantee of sheet rigidity under cutting of details on machines with numerical control are possible; in this case, the dependence from lists of fulfilled works arises. The method of solving is based on widely undestanding dynamic programming; method which is expounded on the functional level. In the presence of preceding conditions there is no need for construction of full array of the Bellman function values. For the concrete variant of the problem connected with sheets cutting by the machines with numerical programming control, the proposed (optimal) algorithm is realized on a personal computer; results of calculation experiment are proposed.
Текст научной статьи Обобщенная модель курьера с дополнительными ограничениями
Рассматривается математическая модель процесса последовательного обхода, мегаполисов с условиями предшествования (обобщенная задача, курьера), в которой как функции стоимости, так и ограничения на текущие перемещения зависят от списка заданий, не выполненных на текущий момент, или, напротив, — от списка уже выполненных заданий.
Данная особенность возникает в целом ряде инженерных задач, из которых сейчас отметим только одну, а. именно: задачу управления инструментом при листовой резке деталей на машинах с ЧПУ. Помимо большого числа условий предшествования, возникающих из технологических ограничений, связанных с более ранней резкой внутренних контуров (и « внутренних » деталей) в сравнении с внешним для каждой детали, имеются другие условия. Сейчас отметим требование к обеспечению жесткости листа. Последнее означает, что новые точки врезки должны всякий раз отстоять на достаточном расстоянии от « пустот » , образовавшихся за счет уже вырезанных деталей, что требует от процедуры управления использования информационной памяти.
В статье рассматривается постановка, позволяющая учесть упомянутое обстоятельство, связанное с использованием памяти, и распространяющаяся вместе с тем на другие прикладные задачи (так, например, предлагаемая схема, может быть применена. с целью учета, естественных ограничений в задаче о демонтаже энергоблока АЭС, выведенного из эксплуатации). Важно отметить, что предлагаемая конструкция на основе динамического программирования (ДП), учитывающая зависимость от списка (выполненных, либо, напротив, не выполненных) заданий, реализуется в пределах тех же возможностей в части вычислений, что и ранее применяемые ее аналоги в постановках, где указанная зависимость отсутствовала. Упомянутая конструкция излагается в статье в виде алгоритма на функциональном уровне; данный алгоритм был реализован на ПЭВМ, в статье приведено описание вычислительного эксперимента для модельного примера задачи, связанной с листовой резкой на машинах с ЧПУ.
Исследуемая в работе задача имеет своим прототипом известную труднорешаемую задачу коммивояжера (ЗК); см., в частности, [1-4]. В связи с применением ДП для решения ЗК отметим работы [5,6]. Рассматриваемый в статье вариант маршрутной задачи существенно отличается от ЗК как в части задания функций стоимости (допускается зависимость от списка заданий), так и в части используемых ограничений, что мотивировано потребностями прикладных задач. В связи с вышеупомянутой задачей управления инструментом при листовой резке на машинах с ЧПУ отметим работы [7-10], а в связи с машрутизацией в задачах атомной энергетики см., в частности, монографию [11].
1. Обозначения и определения общего характера
В дальнейшем используется стандартная теоретико-множественная символика: кванторы, связки: = — равенство по определению, def заменяе'т фразу « по определению », 0 — пустое множество. Семейством называем множество, все элементы которого — множества; в дальнейшем, как правило, рассматриваются семейства подмножеств (п/м) того или иного наперед заданного множества. В этой связи следуем соглашениям: если H — миожество. то через P ( H ) (через P‘ ( H )) обозначаем семейство всех (всех непустых) п/м H ; Fin( H ) есть def семейство всех конечных множеств из P' ( H ) (если H конечно. то Fin( H ) = P' ( H )).
Для любых объектов x п у че}зез {x ; у} обо значаем миожество. содержащее x. у и не содержащее никаких других элементов. Если z — объект, то {z} = {z ; z} есть синглетон, содержащий z. Каждое множество — объект, а потому для произвольных объектов p ii q . следуя [12. с. 67]. полагаем, что ( p, q ) = {{p} ; {p ; q} }. получая упорядоченную пару (УП) с первым элементом p и вторым элементом q . Если же z есть
какая-либо УП, то через pr1( z ) и pr2( z ) обозначаем элементы z: разумеется, z = (pr1 ( z ) , pr2( z )).
Как обычно, для любых трех объектов a, b и (( a,b ) , с ). Традиционное [13, с. 17] соглашение о том,
соответственно первый и второй
с полагаем [13. с. 17] ( a, b, с) = что Л х В х С = ( Л х В ) х С для
произвольных непустых множеств Л, В и С, позволяет при выборе любой функции Ф, действующей из Л х В х С в непустое множество D, рассматривать значение
Ф ( x,y ) G D при x G Л х В ii у G С: полагая x 1 =
Ф ( x 1 ,x 2 ,y ) = Ф ( x,y )•
Как обычно. R — вещественная прямая. N { 0;1;2; ...} G P' (R):
p T q = { k G No | ( p < k )&( k < q )}
pr1( x ) 11 x 2 = pr2( x ). имеем также
= { 1; 2; ...} 11 No = { 0 } U N =
Vp G No Vq G No
(в (1) допускается реализация 0). Еели K — непустое конечное множество, то |K| G N есть def мощность (количество элементов) K при этом определено непустое множество (bi)[K] всех бпекщin [14. с. 87] «промежутка» 1, \K| пa, K. Накеэпец. |0| = 0.
Через R + [ T ] обозначаем множество всех функций, действующих из непустого множества, T в полупрямую [0 , то [ = {^ G R | 0 < £}.
-
2. Постановка задачи
Фиксируем непустое множество X, x 0 G X. N G N , N > 2. множества,
M i G Fin( X ) ,..., M n G Fin( X ) ,
-
а, также отношения M1 G P‘ ( M 1 x M 1) ,..., M N G P‘ ( MN x MN ). Постулируем, что ( x 0 G Mj Vj G 1 ,N )&( Mp ПMq = 0 Vp G 1 ,Nq G 1 ,N\ {p} ). Множества (2) именуем мегаполисами. Отношения M j, j G 1 , N , соответствуют возможным вариантам проведения (внутренних) работ при посещении мегаполисов. В этой связи при j G 1 ,N полагаем, что M j = {pr1( z ) : z G M j } i1 M j = {pr2( z ) : z G M j }. получая непустые п м Mj. Тогда,
X = {x 0 } и (J Mi ) G Fin( X ) , X = {x 0 } U (J M . ) G Fin(X) . i =1 i =1
Пусть в дальнейшем N = P‘ (1 , N ) и заданы (многозначные) отображения
A i : X x N ^ P‘ ( M i) , ..., A n : X x N ^ P‘ ( M n ) . (3)
Мы полагаем, что при j G 1 , N. x G X \ Mj ii K G N множество Aj ( x, K ) C Mj исчерпывает возможности перемещения из x в мегаполис Mj при уеловии, что K — список заданий, не выполненных на момент перемещения (зависимость такого рода, мы распространяем и на случай x G Mj, что формально можно сделать, отождествляя, например, соответствующий вариант Aj ( x,K ) с Mj-, доопределения такого рода используем ниже без дополнительных пояснений). Возможен случай, когда, упомянутые возможности зависят на самом деле не от K, а от списка K заданий, которые на момент перемещения уже выполнены; однако данный случай легко включается в рассматриваемую ниже схему, поскольку K = 1 , N \ K ; мы не будем специально на этом останавливаться. Полагаем в дальнейшем, что
Aj ( x, K ) П M j = 0 Vx G X VK G N Vj G K. (4)
Если j G 1 , N. x G Xi i K G N. to
A j ( x,K ) = { z G M j| pr1( z ) G Aj ( x,K )} . (5)
Элементы непустого множества P = (bi)[1 , N ] именуем (полными) маршрутами. Каждому маршруту a G P (перестановке [14, с. 87]) сопоставляем перестановку а- 1 G P. обратиую к а: а- 1( а ( k )) = а ( а- 1( k )) = k Vk G 1 , N . Пл-сть Z ecть def множество всех кортежей
( z. ) i6 O N : ал ^ X x X ; (6)
среди кортежей (6) выделяем траектории, согласованные с маршрутами; итак, при a Е P в виде
Za = {( zt ) te on Е Z | ( z о = ( x 0 ,x 0))&( Z t Е M , ( т ) V t Е 1 ,N )& &(pn( Zs ) Е Aa ( s )(pr2( Zs- 1) , {a ( j ) : j Е s,N} ) Vs Е 1 ,N )}
имеем множество всех траекторий, согласованных с a. Удобно рассматривать (7), как вариант более общего определения, полагая при K Е N, что Z к есть def множество всех кортежей ( zi ) ie 0” [к[ : 0 , KI ^ X х X- 11 рассматрпвая при x Е Xi i а Е (bi)[ K ] множество
Z ( x,K,a ) = {z Е Z к| (z(0) = ( x,x ))&(z( t ) Е M a ( t ) Vt Е 1 , |K| ) & ,g.
&(pr1(z( s )) Е Aa ( s ) (pr2(z( s - 1)) , { a ( j ): j Е s | K |} ) V s Е 1 , | K 1 )} •
Тогда Za = Z ( x 0 , 1 , N, a ) Va Е P. С использованием индукции устанавливается, что Z ( x, K, a ) = 0 Vx Е X VK Е N Va Е (bi)[ K ]. В частпости, Za Е Fin(Z) Va Е P.
Предполагается, что выбор маршрута a Е P может быть стеснен условиями предшествования. В этой связи фиксируем множество K Е P (1 , N х 1 , N ), элементы которого (а это УП) называем адресными парами; при z Е K pr1( z ) и pr2( z ) имеют смысл индексов « отправителя » и « получателя » соответственно. Полагаем в дальнейшем, что V K0 Е P‘ (K) 3z о Е K0 : pr1( z о) = pr2( z ) Vz Е K0. Тогда, (см. [15. часть 2])
A = { a Е P | Vz Е K Vt 1 Е 1 , N Vt 2 Е 1 , N ((pr1 ( z ) = a ( t 1 ))&(pr2( z ) = a ( t 2))) ^ ,g\
^ (t1 < t2)} = {a Е P| a-1 (pr1(z)) < a- 1(pr2(z)) Vz Е K} Е P‘(P), а потому A Е Fin(P). В качестве допустимых решений (ДР) мы рассматриваем УП (a, z), a Е A, z Е Za. В виде
D = {( a, z) e A х Z | z Е Za } ,
имеем непустое множество всех ДР. Введем в рассмотрение функции стоимости, позволяющие затем определить аддитивный критерий. Итак, фиксируем c Е R +[X х X х N], с 1 Е R +[X х X х N],^^^,cw Е R +[X х X х N], f Е R + [X]• (11)
Итак, (с, с 1, •••, cN, f) есть набор функций стоимости; c служит для оценивания внешних перемещений (из x0 в мегаполисы и между мегаполисами), Cj, г де j Е 1, N, оценивает работы, связанные с посещением Mj, а f используется для оценки терминального состояния. Функции (11), следовательно, применяются для оценивания процессов вида,
z 0 ^ (pr1( z 1) Е Ma (1) ^ pr2( z 1) Е Ma (1)) ^ ••• ^ (pF1( Z n ) Е Ma ( N ) -^ pr2( Z n ) Е Ma ( N )) ,
где a Е A 11 (zi)ieotn Е Za. Соответствешю. 5'П (a, (zi)ieotn) Е D (cm. (10)) сопостав ляется
N
C a [( z i ) ie 0 N ] = )E1 [C(pr2( z s- 1) , pr1( z s ) , { a ( t ) : t Е s ,N } ) + + Ca ( s )( Zs, {a ( t ) : t Е s,N} )] + f (pr2( Z n )) Е [0 , to [ •
В качестве основной, рассматриваем в дальнейшем следующую задачу:
C а [( zi ) ie on ] ^ min , а G A , ( zi ) iG on E Za. (14)
Данная задача совместна по ограничениям и обладает (конечным) значением
V △ min. Amin C а [( zi ) iG O N ] G [0 , ^ [ U5)
aGA (zi)iG0,N GZa и непустым множеством D0 = {(a0, z0) G D| Ca0 [z0] = V} оптимальных решений. Наша цель состоит в нахождении V (15) и какого-либо оптимального ДР.
-
3. Слои функции Беллмана; решение задачи
В настоящем разделе рассматривается экономичный вариант динамического программирования (ДП), восходящий к [15, §4.9]; см. также [16,17]. Последующее изложение соответствует алгоритму на функциональном уровне и его логично начать с построения слоев пространства позиций. Последние, в свою очередь, базируются на конструкции существенных списков заданий, которую сейчас напомним совсем кратко, полагая C = K G N | Vz G K (pr1( z ) G K ) ^ (pr2( z ) G K )} ii получая семейство (всех) существенных списков заданий. Семейства Cs = { K G C| s = |K| }, где s G 1 , N . образуют в своей совокушюсти разбиение С . При этом CN = { 1 , N} (cini-глетои. содержащий 1 , N ) п С 1 = { {t} : t G 1 , N \ K1}. г,те K1 = { pr1( z ) : z G K }. Следуя схеме [15, часть 2], введем отображение I, действующее в N по правилу I( K ) = K \ {pr2( z ) : z G Е[ K ]}. где (при K G N) Е[ K ] = { z G K | (pri( z ) G K )&(p^( z ) G K )} (см. также [16-19]). Наконец, (см. [18,19])
Cs 1 = { K \ {t} : K G Cs, t G I( K )} Vs G 2N (16)
Итак, в виде CN ^ CN_ 1 ^ ... ^ С 1 имеем рекурретгтиую процедуру: CN известно, а далее следует применять (16). Следующий этап состоит в построении множеств D о , D 1 , ...,DN, являющихся по смыслу слоями пространства позиций. Полагаем, что
D n △ {( X 0 , XN )} 11 D 0 △ {( X, 0 ) : X G M} , (17)
△ где M = [J Mi. Если же s G 1, N — 1, то при K G Cs вводим последовательно iG 1N \K1
Js ( K ) △ { j G 1Л \ K | {j } U K G Cs +1} G P‘ (1Л) ,
Ms[K] △ J Mj G P‘(X), Ds[K] △ {(x,K) : x G Ms[K]} G P‘(X x Cs), jGjs (K)
после чего полагаем, что
Ds △ U D s [ K ] G P' (X x Cs ) , (18)
KGCs получая непустое п/м X х Cs. Итак, все множества Dо,D1,...,DN определены. Отметим следующее свойство, рассматриваемое в более частных случаях в [15-19]:
(pr2 (г) ,K \ {j }) G Ds-1 Vs G 1N V(x, K) G Ds Vj G I(K) Vz G Aj (x, K).(19)
С учетом непустоты множеств-слоев D0, D1 ,...,DN последовательно определяем функции vо GR +[Dо],v 1 GR +[D1],...,VN GR +[Dn].(20)
Итак, определяем функцию v0 в (20) посредством условия vо(x, 0) = f (x) Vx G M;(21)
учитываем при этом (17). Если s G 1 , N и функция vs- 1 (см. (20)) уже построена, то vs G R +[ Ds ] определяем следующим правилом, учитывающим (19):
Vs ( x,K ) = min min [ c ( x, ргД z ) ,K ) + cj ( z,K ) + vs_ 1(pr2( z ) ,K\{j } )] je I( к ) ze a j ( x,K )
V ( x, K ) G Ds.
Тем самым реализуется рекуррентная процедура
Vо —— V1 —— ... —— VN, на последнем этапе которой определяется vN(xо, 1, N) G [0, то[ (см. (17)). При этом
V = v n ( x о , 1 , N ) .
Доказательство (24) использует рассуждения, опирающиеся на конструкции, подобные [16-19] и использующие соответствующее уравнение Беллмана.
Построение оптимального решения. Полагаем, что процедура (23) завершена. Из (22) и (24) вытекает, что
V = min min [c(xо, рГ1 (z), 1 ,N) + cj(z, 1 ,N) + vn- 1(pr2(z), 1 ,N \ {j})], (25) jeI(1 ,N) zeAj(xо, 1 ,n)L где согласно (17) п (19) (pr2(z), 1, N \ {j}) G DN_1 щш j G I(1, N) i1 z G Aj(xо, 1, N). С учетом (25) выбираем n 1 G I(1, N) и z(1) G An 1 (xо, 1, N) из условия
V = c ( x о , pr1( z (1)) , 1 ,N ) + Cn 1 ( z (1) , 1 ,N ) + v n - 1(pr2( z (1)) , 1 ,N \ {n 1 } ) (26)
(свойство (26) означает, что ( n 1 , z (1)) есть решение локальной экстремальной задачи, связанной с (25)). При этом, конечно,
(pr2( z (1)) , 1 N \{n 1 } ) G D n - 1 . (27)
Тогда, согласно (19) (pr2( z ) , 1 ,N \ {n 1; j} ) = (pr2( z ) , (1 ,N \ {n 1 } ) \ {j} ) G D n - 2 при j G I (1 ,N \ {n 1 } ) 11 z G A j (pr2( z (1)) , 1 ,N \{n 1 } ). С учетом (22) ii (27) имеем, что
VN- 1(pr2(z(1)) , 1 ,N \{n 1 } )= ____
= mi n min c (pr2( z (1)) , pr1( z ) , 1 , N \ {n 1 } ) +
je I(1 ,N\{n 1 } ) z e A j (p r2(z(1)) , 1 ,n \{n 1 } ) ______
+ cj ( z, 1 ,N \ {n 1 } ) + V N - 2(pr2< z ) , 1 ,N \ {n 1; j } )] .
С учетом (28) выбираем п 2 € I(1 , N\{п 1 } ) и z(2) G A n 2(pr2(z(1)) , 1 , N\{п 1 } ) из условия
VN- 1(Pr2(z(1)) , 1 ,N \ {П 1 } ) = c(Pr2(z(1)) , Pr1(z(2)) , 1 ,N \ {П 1 } ) + + cn 2 (z(2) , 1 ,N \ {п 1 } ) + vN- 2(Pr2(z(2)) , 1 ,N \ {п 1; п 2 } ) ,
где согласно (19) (pr2(z(2)) , 1 , N \ {п .; п 2 } ) G DN- 2. Из (26) и (29) получаем, что
V = c( x 0 , pr1(z(1)) , 1 , N ) + c(pr2(z(1)) , pr1(z(2)) , 1 ,N \ {п 1 } ) +
+ cn 1 (z(1) , 1 ,N ) + cn 2 (z(2) , 1 ,N \ {п 1 } ) + vN- 2(pr2(z(2)) , 1 ,N \ {п 1; п 2 } ) •
Процедуру, состоящую из этапов, подобных (26), (29), следует продолжать вплоть до исчерпывания всего индексного множества 1 , N , т.е. до исчерпывания полного списка заданий. В результате будут построены маршрут п = ( пj ) je 1 N G A и траектория (z( j }) je 0 N G Zn- образуктще ДР ( п, (z( j )) jG o N ) G D Для ксuoporo C n [(z( j )) jE o N ] = V (при N = 2 данное свойство непосредственно следует из (30) по определению v 0). Итак, построенное ДР оптимально в задаче (14): ( п, ( z ( j )) je o N ) G Do.
-
4. Вычислительный эксперимент
Теоретические конструкции, рассматриваемые в данной статье, использованы при проведении вычислительного эксперимента по решению задачи оптимизации резки в виде следующей упрощенной модели. В качестве множества X будем рассматривать прямоугольную область на плоскости, имеющую смысл некоторого листа материала, подлежащего раскрою на некоторое множество деталей; а именно: в нашей модели X = [ a 1 , a 2] х [ b 1 , b 2]. г,те a 1 G R. a 2 G R. b 1 G R i1 b 2 G R; веществениые числа, a 1 < a 2. b i < b 2 зафиксированы. Под числом N будем понимать количество вырезаемых контуров деталей. Каждый контур характеризуется основной и вспомогательной эквидистантой: вспомогательную эквидистанту образуют точки врезки и соответствующие им точки выключения резака, а, основная эквидистанта — это собственно траектория движения инструмента, с включенным резаком, по которой он движется при резке контура детали. Вспомогательная эквидистанта расположена в непосредственной близости от основной, именно с ней отождествляются в нашей модели мегаполисы (2). В данной модели обе эквидистанты каждого контура подвергнуты дискретизации. Таким образом бинарные отношения Mi ,..., M N есть множества пар точек, первый элемент каждой пары — это точка врезки, второй — точка выключения инструмента. Точка x 0 в нашей модели является исходным положением, терминальным этапом процесса (12) является переход инструмента в точку x 0. Условия предшествования имеют вполне естественный технологический характер: резка внутренних контуров всегда, должна, предшествовать вырезанию внешних контуров; допускается размещение одних деталей внутри других, но не допускается пересечение эквидистант вырезаемых контуров.
Пусть функции (11) заданы следующим образом.
-
1) Функция c оценивает затраты на перемещение инструмента из исходного положения x 0 или точки выключения резака в следующую (по порядку реализации раскройного плана) точку врезки и задается посредством евклидова, расстояния; данные перемещения производятся с выключенным резаком;
-
2) Функции c 1 , •••^cN оценивают суммарные затраты на перемещение инструмента с включенным резаком из точки врезки x в точку у на основной эквидистанте
и на отвод инструмента после завершения вырезания контура в точку выключения резака, z . Данные функции задаютея в виде выражения 3 * р ( х,у ) + р ( у, z ). г,те р — евклидово расстояние; коэффициент 3 служит для оценивания дополнительных затрат, связанных с пробивкой материала, при врезке и движении к основной эквидистанте; отметим, что движение инструмента, от основной эквидистанте к точке выключения инструмента, поизводится также с включенным резаком, но в данном случае не требуется прорезание « перемычки » между основной и вспомогательной эквидистантами;
-
3) Функция f — суть евклидово расстояние от точки выключения резака на последнем (по порядку реализации раскройного плана) контуре до исходной позиции т 0 ^х
Зададим отображения (3) следующим образом. Пусть в данный момент времени не вырезанными остаются контура с индексами из множества K, K С 1 , N, а резак находится в позиции х , которая либо является исходным положением х 0 (в этом случае K = 1 , N ), либо некоторой точкой выключения инструмента, т.е. х Е M j, j Е 1 , N \ K. Рассматриваем способ построения множества допустимых для перемещения резака точек врезки на контуре с индексом i, т.е. п/м множества M i. Поскольку в случае, когда перемещение осуществляется из точки х 0, ни один контур еще не вырезан, все точки врезки доступны для перехода. Поэтому рассмотрим случай, когда K = 1 , N . Критериев допустимости два:
-
1) соблюдение тепловых допусков;
-
2) исключение сильно удаленных точек контура (минимизация времени перемещений резака между контурами).
Критерии упомянуты в порядке убывания приоритета, т.е. среди точек, удовлетворяющих 1) выбираются те, которые удовлетворяют 2).
Рассмотрим подробно оба, критерия отбора, точек врезки. Будем рассматривать процесс построения множества, допустимых точек врезки для контура с индексом i Е K- т.е. п м }тожества M i : зафиксируем для iтглядности индекс г.
Г) Пусть задана величина теплового допуска 5 Е R , 5 > 0. Точка врезки у, у Е M i удовлетворяет критерию Г), если ( р ( y,z 1) > 5 vz 1 Е M k ^k Е 1 , N \ K )&( р ( у, z 2) > 5 ^z 2 Е Mk ^k Е 1 , N \ K ). где Mk — основная эквидиста!:та контура с индексом к. Если для контура не находится ни одной допустимой точки врезки, то все возможные его точки врезки признаются допустимыми для исключения коллизии, связанной с невозможностью задания множества Ai ( x,K ).
-
2’ ) Среди точек врезки у, у Е M(1), удовлетворяющих 1 ’), выбирается точка у’ такая, что c ( х,у‘ ) = min c ( х,у ). г,те х Е M j, j Е 1 ,N \ K. a, M(1) С M i — подмио- ye M(1)
жество удовлетворяющих 1’) точек врезки контура с индексом i Точка у’ признается допустимой согласно критерию 2’). Для каждого контура пусть задана, величина допуска Ek Е R , Ek > 0, г де к Е 1 , N. Точка врезки у, у Е M(1), удовлетворяет критерию 2'). если с ( х,у ) — с ( х,у' ) < Ei.
Итак, при перемещении из точки выключения резака х Е M j, j Е 1 ,N \ K, на контур с индексом i значения отображения Ai ( x,K ) составляют точки у Е M i, которые удовлетворяют критериям Г) и 2’). При этом ограничение Г) реализует зависимость отображения Ai от списка уже выполненных заданий, а критерий отбора 2’) — зависимость от точки перехода.
Данная алгоритмическая контрукция была реализована в виде программы для
ПЭВМ, написанной на языке программирования C++. Программа работает под управлением 64-х разрядной операционной системы семейства Windows, начиная с версии Windows 7. Вычислительная часть программы реализована в отдельном от интерфейса пользователя потоке; для случая решения задачи на плоскости имеется возможность графического представления траектории движения инструмента с возможностью увеличения отдельных участков графика и сохранения изображения в файл графического формата bmp. Программа позволяет решать задачу оптимизации резки в условиях действия только критерия отбора точек Г) или Г) и 2’) (см. выше); в данной работе приведем пример решения задачи, где используются оба типа ограничения на выбор точек врезки.
Вычислительный эксперимент проводился на ПЭВМ с процессором Intel Core i7, объемом ОЗУ 64 гБ с установленной операционной системой Windows 7 Максимальная SP1. В исследуемом примере N = 31, | K | = 20, x 0 = (0 , 0) (совпадает с началом координат) и 6 =10. Величиньi допусков е 1 , ...,eN задавались равными для всех контуров и варьировались. Приведем результаты решения задачи на ПЭВМ; на графиках значками < 1 помечены точки врезки, а > — точки выключения инструмента.
При величине допуска ек = 2 Vk Е 1 , 31 получены следующие результаты: величина совокупных затрат: V = 1104 , 18; время счета составило 4 ч 7 м 26 с. График маршрута и трассы приведен на рис. 1.
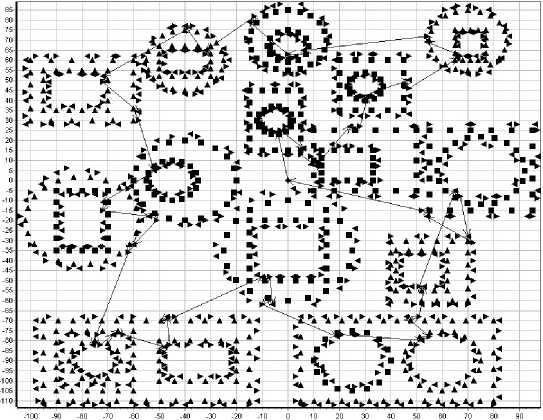
Рис. 1. Маршрут и трасса при значении допуска 2
Если величина допуска ек = 10 Vk Е 1 , 31, то получены следующие результаты: величина совокупных затрат: V = 1017 , 891; время счета составило 4 ч 17 м 48 с. График маршрута и трассы приведен на рис. 2.
При величине допуска ек = 50 Vk Е 1 , 31, получены следующие результаты: величина совокупных затрат: V = 1015 , 3 время счета составило 4 ч 23 м 12 с. График маршрута и трассы приведен на рис. 3.
Такое поведение результата вполне закономерно: с ростом величины допуска увеличивается количество вариантов для осуществления врезки и, как следствия, получается больше вариантов для оптимизации затрат, но при этом растет объем перебо-
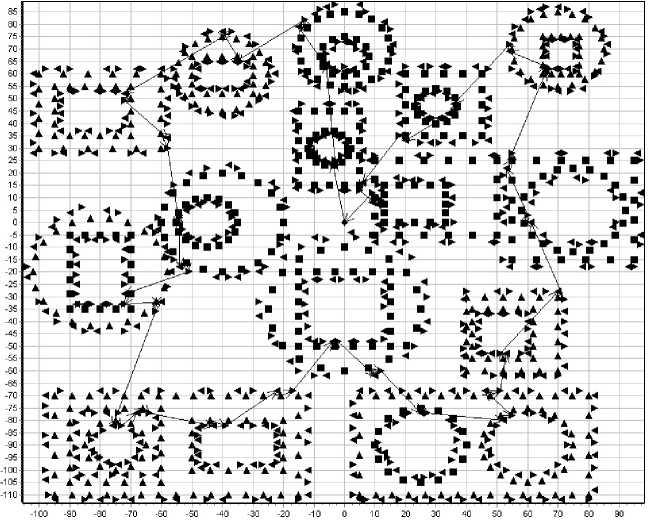
Рис. 2. Маршрут и трасса при значении допуска 10
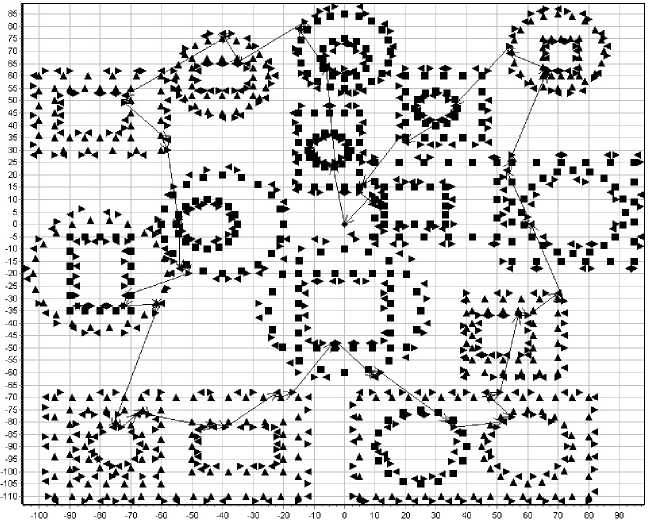
Рис. 3. Маршрут и трасса при значении допуска 50
ра, что неизбежно влечет увеличение времени счета; именно такие закономерности мы и наблюдаем в приведеных трех примерах.
Работа выполнена при финансовой поддержке РФФИ (проект 15-01-07909), постановление №211 Правительства РФ, контракт № 02.А03.21.0006.
Список литературы Обобщенная модель курьера с дополнительными ограничениями
- Меламед, И.И. Задача коммивояжера. Вопросы теории/И.И. Меламед, С.И. Сергеев, И.Х. Сигал//Автоматика и телемеханика. -1989. -№ 9. -С. 3-34.
- Меламед, И.И. Задача коммивояжера. Точные алгоритмы/И.И. Меламед, С.И. Сергеев, И.Х. Сигал//Автоматика и телемеханика. -1989. -№ 10. -С. 3-29.
- Меламед, И.И. Задача коммивояжера. Приближенные алгоритмы/И.И. Меламед, С.И. Сергеев, И.Х. Сигал//Автоматика и телемеханика. -1989. -№ 11. -С. 3-26.
- Gutin, G. The Traveling Salesman Problem and Its Variations/G. Gutin, A.P. Punnen. -Berlin: Springer, 2002.
- Беллман, Р. Применение динамического программирования к задаче о коммивояжере/Р. Беллман//Кибернетический сборник. -1964. -Т. 9. -С. 219-228.
- Хелд, М. Применение динамического программирования к задачам упорядочения/М. Хелд, Р.М. Карп//Кибернетический сборник. -1964. -Т. 9. -С. 202-218.
- Петунин, А.А. О некоторых стратегиях формирования маршрута инструмента при разработке управляющих программ для машин термической резки материала/А.А. Петунин//Вестник Уфимского государственного авиационного технического университета. -2009. -Т. 13, 2 (35). -C. 280-286.
- Петунин, А.А. К вопросу о маршрутизации движения инструмента в машинах листовой резки с числовым программным управлением/А.А. Петунин, А.Г. Ченцов, П.А. Ченцов//Научно-технические ведомости СПбГПУ. Серия: Информатика. Телекоммуникации. Управление. -2013. -№ 2 (169). -С. 103-111.
- Петунин, А.А. Об одной задаче маршрутизации перемещений инструмента при листовой резке деталей/А.А. Петунин, А.Г. Ченцов, П.А. Ченцов//Моделирование и анализ информационных систем. -2015. -№ 2. -С. 278-294.
- Фроловский, В.Д. Автоматизация проектирования управляющих программ тепловой резки металла на оборудовании с ЧПУ/В.Д. Фроловский//Информационные технологии в проектировании и производстве. -2005. -№ 4. -С. 63-66.
- Методы маршрутизации и их приложения в задачах повышения безопасности и эффективности эксплуатации атомных станций//В.В. Коробкин, А.Н. Сесекин, О.Л. Ташлыков, А.Г. Ченцов; под общ. ред. И.А. Каляева. -М.: Новые технологии, 2012.
- Куратовский, К. Теория множеств/К. Куратовский, А. Мостовский. -М.: Мир, 1970.
- Дьедонне, Ж. Основы современного анализа/Ж. Дьедонне. -М.: Мир, 1964.
- Кормен, Т. Алгоритмы: построение и анализ./Т. Кормен, Ч. Лейзерсон, Р. Ривест. -М.: МЦНМО, 1999.
- Ченцов, А.Г. Экстремальные задачи маршрутизации и распределения заданий: вопросы теории./А.Г. Ченцов. -Москва; Ижевск: РХД, 2008.
- Ченцов, А.Г. Задача последовательного обхода мегаполисов с условиями предшествования/А.Г. Ченцов//Автоматика и телемеханика. -2014. -№ 4. -С. 170-190.
- Ченцов, А.Г. К вопросу о маршрутизации комплексов работ/А.Г. Ченцов//Вестник Удмуртского университета. Математика. Механика. Компьютерные науки. -2013. -№ 1. -С. 58-82.
- Ченцов, А.Г. Одна параллельная процедура построения функции Беллмана в обобщенной задаче курьера с внутренними работами/А.Г. Ченцов//Автоматика и телемеханика. -2012. -№ 3. -С. 134-149.
- Ченцов, А.Г. Одна параллельная процедура построения функции Беллмана в обобщенной задаче курьера с внутренними работами/А.Г. Ченцов//Вестник Южно-Уральского государственного университета. Серия: Математическое моделирование и программирование. -2012. -№ 3. -С. 44-52.
