Обоснование эксплуатационных параметров системы позиционирования садкового модуля для промышленного выращивания рыбы

Автор: Тихонов Евгений Андриянович
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 3 т.16, 2019 года.
Бесплатный доступ
В настоящее время промышленное выращивание рыбы в садках развивается в Республике Карелия, в Псковской области, а также в других регионах и странах. С увеличением объемов производства рыбы возрастает актуальность технологических, технических и биологических проблем получения экологически безопасной продукции рыбного хозяйства. В представленной работе рассматриваются технические аспекты совершенствования конструкции садкового модуля для промышленного выращивания рыбы. Цель работы: уменьшение затрат на систему фиксации положения кластера садков. Задача, которую необходимо решить для достижения данной цели заключается в разработке новой системы фиксации садков с учетом их взаимодействия в кластере. Для решения данной задачи использован патентный поиск и анализ сильных и слабых сторон известных технических решений садков и их систем. Разработана система удержания садкового модуля, в которой не подразумевается использование круглозвенных цепей, а натяжение системы обеспечивается балансирами. Кроме того, учет вертикальной составляющей при расчете реакции опоры якоря позволило боле точно рассчитать необходимую массу якорей с учетом уменьшения силы трения и архимедовой силы.
Аквакультура, система удержания садкового модуля, моделирование динамических систем
Короткий адрес: https://sciup.org/147225671
IDR: 147225671 | УДК: 639.3.06 | DOI: 10.15393/j2.art.2019.4442
Operational parameters justification of cages holding system for industrial fish farming
The article deals with the technical aspects of industrial fish farming cages module improvement. The design of the cages module holding system is aimed at decreasing expenses for the system fixation. A new system is developed by taking into account the cages interaction in the module. The tension of the system is provided by balances usage. The vertical component of anchor reaction is used for accurate calculation of the necessary anchor masses by taking into account friction force decrease and Archimedean force.
Текст научной статьи Обоснование эксплуатационных параметров системы позиционирования садкового модуля для промышленного выращивания рыбы
В настоящее время промышленное выращивание рыбы в садках развивается в Республике Карелия [1], в Псковской области [2], а также в других регионах [3], [4] и странах [5], [6]. С увеличением объёмов производства рыбы возрастает актуальность технологических, технических и биологических проблем получения экологически безопасной продукции рыбного хозяйства [1], [8].
В представленной работе рассматриваются технические аспекты совершенствования конструкции системы удержания садков для промышленного выращивания рыбы. В данной области, как правило, применяется так называемая «Норвежская система удержания» [10]. Основной особенностью данной системы является применение круглозвенных якорных цепей, соединяющих удерживающий канат и якорь. При работе системы удержания часть цепи лежит на дне, а часть висит в толще воды, тем самым, с одной стороны, обеспечивая натяжения всей системы канатов и исключая вертикальную составляющую силы, действующей на якорь.
К недостаткам данной системы можно отнести неоправданно большое количество канатов и грузов. Также стоимость 1 м круглозвенной цепи очень высока.
2. Материалы и методы
Цель работы: уменьшение затрат на систему удержания садкового модуля за счёт снижения требуемого количества канатов и отказ от использования круглозвенных цепей.
Задача, которую необходимо решить для достижения данной цели, заключается в разработке динамической расчётной модели системы удержания садкового модуля, которая будет учитывать ветровую и волновую нагрузки на модуль, а также обеспечит натяжение системы и учёт вертикальной составляющей реакции опоры якоря.
Для решения данной задачи применялся численный метод моделирования динамических систем. Данный метод показал свою эффективность и хорошую адекватность получаемых результатов [7].
Для решения данной задачи была смоделирована система удержания садкового модуля из четырёх садков диаметром 25 м. Общая компоновка системы представлена на рисунке 1.
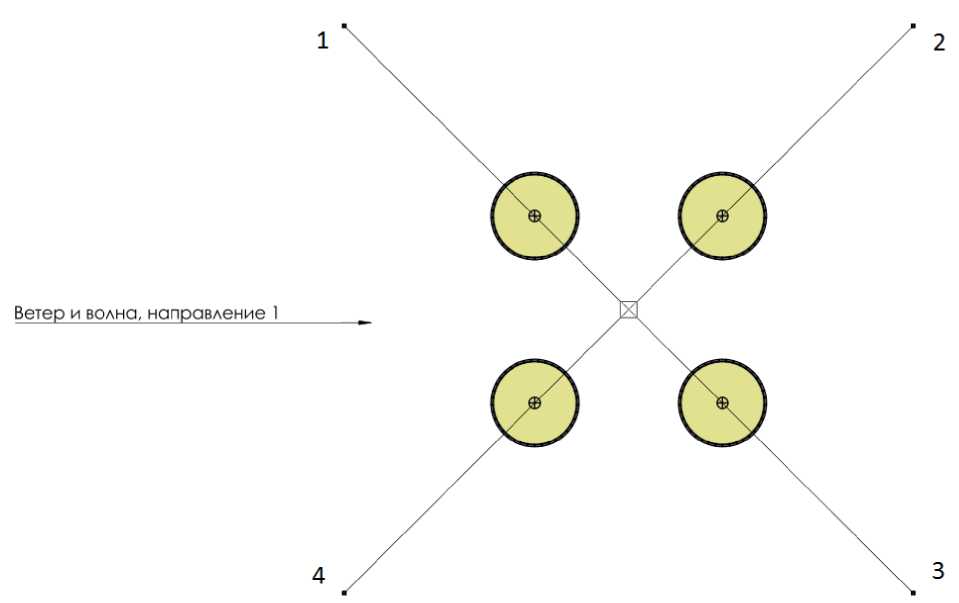
Рисунок 1. Система фиксации садков: 1, 2, 3, 4 — якоря
Далее, необходимо выполнить следующие этапы расчёта:
-
1. Определить исходные данные для расчёта.
-
2. Произвести расчёт ветровой нагрузки на один садок.
-
3. Осуществить расчёт комплексного динамического воздействия волна/ветер на садковый модуль.
-
4. Определить максимальное осевое усилие в удерживающих канатах.
-
5. Определить необходимую массу якоря с учётом динамической отрывающей силы.
В качестве исходных данных примем следующее:
-
1. Скорость ветра 20 м/с.
-
2. Параметры волны:
-
a. Высота 1,88 м.
-
b. Длина 20,7 м.
-
c. Период 3,64 с.
-
3. Течение 0,15 м/с (пренебрегаем).
-
4. Усилие на балансире: 1000 Н (см. рисунок 3).
Расчёт ветровой нагрузки осуществляется в три этапа:
-
1. Определение эпюры скоростей потока воздуха, проходящего через садок.
-
2. Определение суммарного гидравлического давления на элементы конструкции садка.
-
3. Определение реакции опоры места крепления садка.
Для решения поставленных задач используем систему численного моделирования Flow Simulation и Simulation. Для расчёта используем упрощённую модель садка с хомутами, обеспечивающими требуемую парусность (рисунок 2).
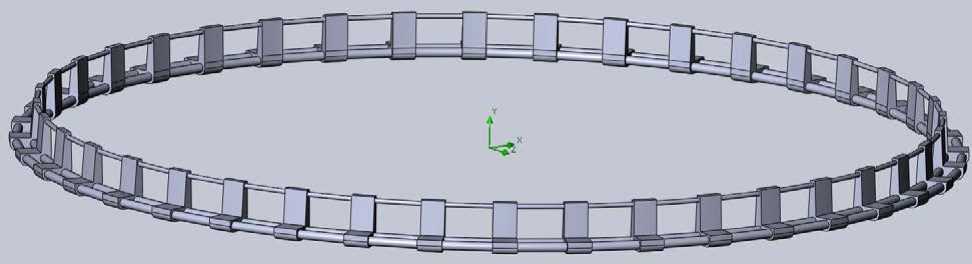
Рисунок 2. Модель садка для определения ветровой нагрузки
Результат продувки садка представлен на рисунке 3.
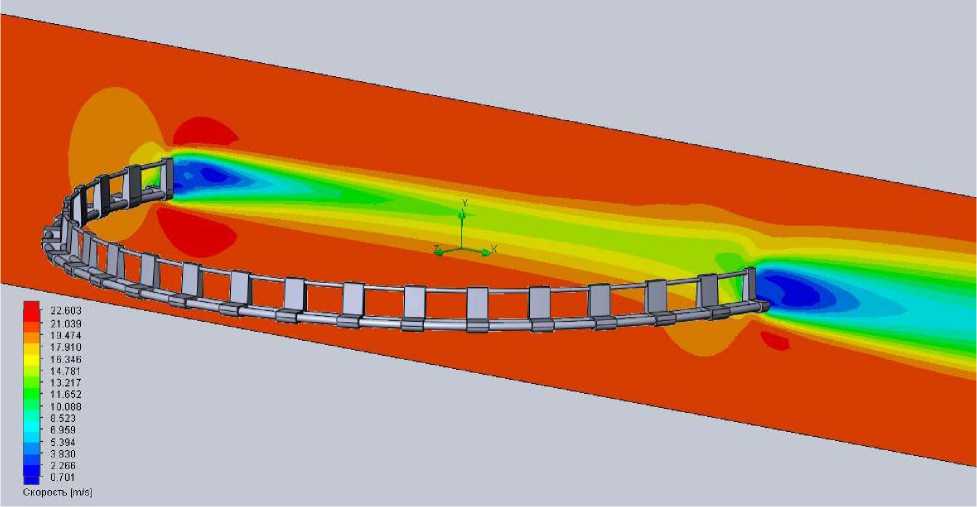
Рисунок 3. Распределение скоростей потока воздуха в диаметральной плоскости садка
Данная ветровая нагрузка приводит к деформациям садка. Форма садка становится эллиптической в пределах упругих деформаций элементов конструкции садка. Определим усилие, действующее на садок, от ветровой нагрузки путём определения реакции опоры места крепления каната к садку (рисунок 4).
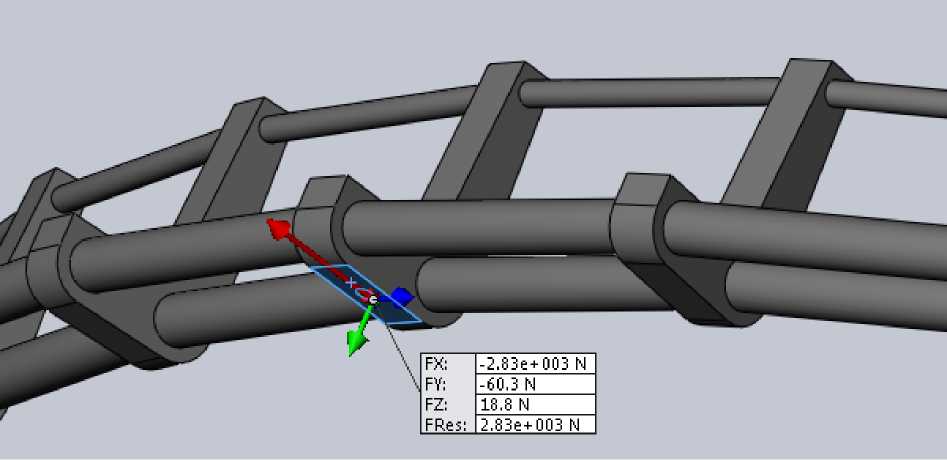
Рисунок 4. Реакция опоры места крепления каната к садку
По результатам расчёта принимаем ветровую нагрузку для дальнейших расчётов, равную 2830 Н.
Для определения динамического воздействия ветра и волны используем систему ANSYS MECHANICAL. Применим нестационарный тип анализа. Для построения расчётной модели используем упрощённую модель садков. Для моделирования канатов используем балочный элемент link180. Общий вид системы представлен на рисунке 5.
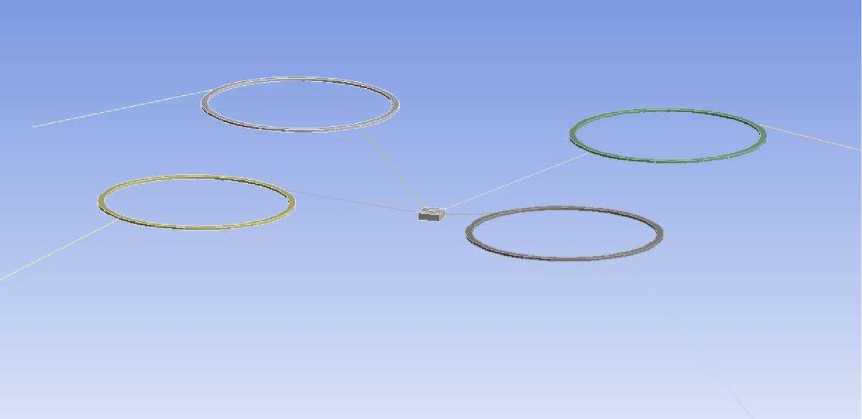
Рисунок 5. Общий вид расчётной модели садкового модуля
Перемещения садков по вертикали определяются формой водной поверхности. Согласно параметрам волны, волновая функция соответствует высоте, длине и периоду волны.
В соответствии с реальными условиями эксплуатации модель ограничена 4 якорными точками. На балансир в центре действует сила, равная 1000 Н. Ветровая нагрузка прикладывается к каждому садку (рисунки 6 и 7).
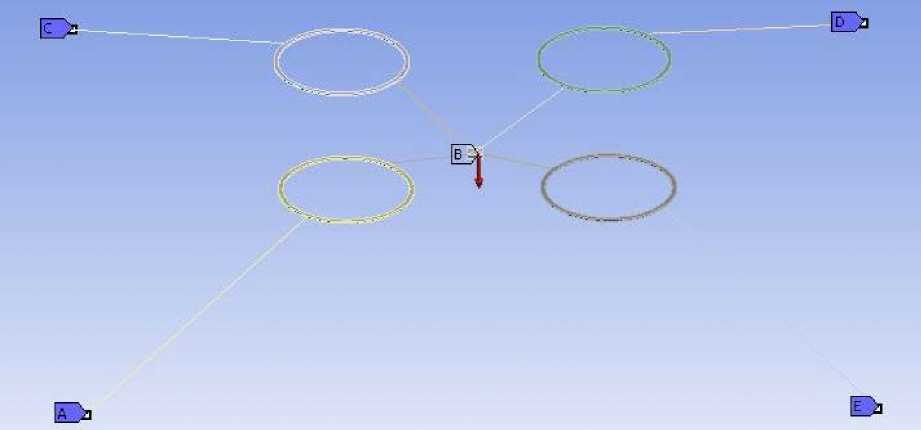
Рисунок 6. Сила тяжести балансира
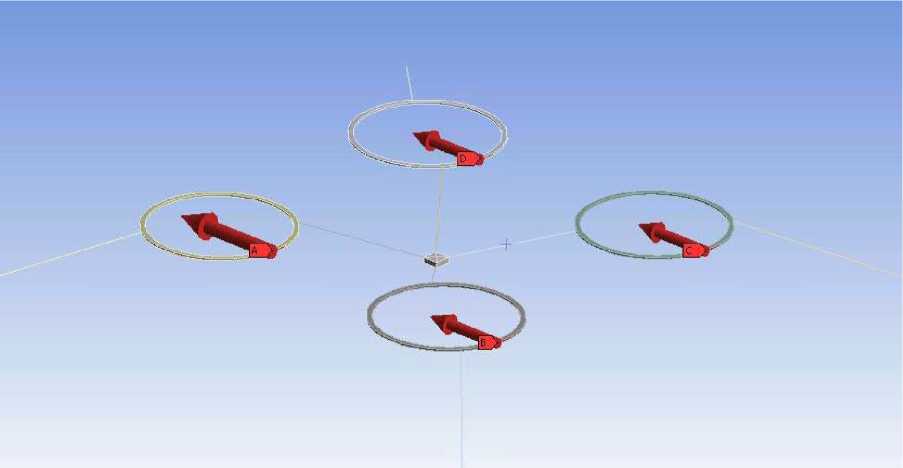
Рисунок 7. Приложение ветровой нагрузки
Направление движения волн совпадает с вектором приложения ветровой нагрузки.
В целом на систему действует ускорение, равное 4000 мм/с2. Данное ускорение имитирует силу тяжести для канатов, погружённых в воду.
Длительность моделирования системы составит 50 с, минимальный шаг по времени расчёта 0,01 с.
3. Результаты
По результатам расчёта получены графики изменения осевого усилия всех канатов.
График изменения осевого усилия наиболее нагруженного каната представлен на рисунке 8.
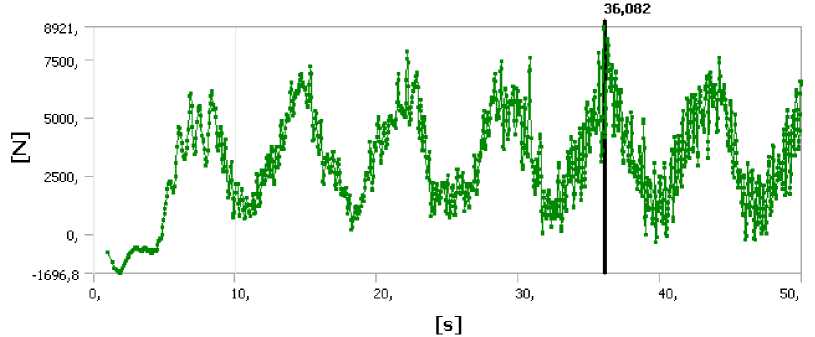
Рисунок 8. График изменения осевого усилия наиболее нагруженного каната
Максимальное усилие, равное 8921 Н, возникает на 36-й секунде моделирования. Это обусловлено цикличностью волновой и инерциальных нагрузок системы. В данный момент времени наблюдается наибольший резонанс колебаний. Теперь, согласно рассчитанному максимальному усилию, можно подобрать канат.
Для определения требуемой массы якорей необходимо учесть комплексный фактор Z/XY. Комплексный фактор Z/XY учитывает величину вертикальной составляющей реакции опоры якоря. В таблице 1 представлены значения усилий, действующих на якоря (опоры) с самым нагруженным канатом, по осям координат.
Таблица 1. Максимальные значения реакций опор по декартовым координатам
|
№ опоры |
По оси X, Н |
По оси Y, Н |
По оси Z, Н |
Суммарная реакция опоры в горизонтальной плоскости, Н |
|
1 |
5142 |
4737 |
1673 |
6991 |
|
2 |
2997 |
2714 |
1081 |
4043 |
|
3 |
1817 |
1836 |
775 |
2583 |
|
4 |
5657 |
5924 |
2238 |
8191 |
Далее, определим необходимую силу тяжести для каждого якоря. Силу тяжести груза определим через минимально необходимую силу трения. Коэффициент трения якоря о дно (удерживающая сила) примем как для гравитационного якоря, без зацепов и лап f = 1,01 [10].
Тогда минимальная составляющая силы тяжести якоря в воде составит:
—* —*
N = <™) + n, f Z, где Nz — сила реакции опоры якоря по оси Z.
Сведем в таблицу 2 результаты расчёта минимальной требуемой силы тяжести якорей в воде.
Таблица 2. Значения минимальной требуемой силы тяжести якорей в воде
|
№ груза |
Минимальная требуемая сила тяжести грузов |
|
1 |
8663 |
|
2 |
5124 |
|
3 |
3357 |
|
4 |
10429 |
Данная сила тяжести действует в воде. Для расчёта необходимой массы якорей необходимо скомпенсировать архимедову силу. Для этого примем плотность материала якоря (гранит), равную 2500 кг/м3.
Выполним итерационный расчёт масс якорей с подбором требуемого объёма якорей. Результаты расчёта приведены в таблице 3.
Таблица 3. Итерационный расчёт массы якорей
|
Объём груза (принимаем), 3 м |
Архимедова сила, Н |
Минимальная сила тяжести якоря на суше, Н |
Масса якоря, кг |
Объём якоря (расчётный), 3 м |
|
0,59 |
5786 |
14449 |
1473 |
0,59 |
|
0,35 |
3432 |
8556 |
872 |
0,35 |
|
0,22 |
2158 |
5515 |
562 |
0,22 |
|
0,71 |
6963 |
17392 |
1773 |
0,71 |
4. Заключение
Моделирование предложенной системы удержания садкового модуля показало перспективность применения балансиров и отказ от использования круглозвенных цепей.
Это стало возможным благодаря выделению из расчётных реакций опор якорей вертикальной составляющей. Предложенная система позволяет уменьшить требуемое количество канатов и сопутствующего такелажного обеспечения.
Список литературы Обоснование эксплуатационных параметров системы позиционирования садкового модуля для промышленного выращивания рыбы
- Кузнецова, Е. В. Особенности болезней лососёвых рыб при садковом выращивании / Е. В. Кузнецова // Международный вестник ветеринарии. - 2016. - № 4. - С. 18-21.
- Монахов, И. А. Выращивание товарной форели в садках на примере рыбоводного хозяйства Псковской области / И. А. Монахов, С. Б. Купинский // Континентальная аквакультура: ответ вызовам времени. - Москва, 2016. - С. 233-235.
- Особенности садкового выращивания пеляди (coregonus peled) и радужной форели (oncorhynchus mykiss) в горных водоёмах восточного Казахстана / Н. В. Судакова, Л. Б. Кушникова, С. М. Ануарбеков, А. А. Евсеева, Д. К. Жаркенов // Технологии пищевой и перерабатывающей промышленности АПК - продукты здорового питания. - 2017. - № 4 (18). - С. 21-27.
- Хандожко, Г. А. Результаты производственной апробации выращивания стерляди / Г. А. Хандожко, А. А. Васильев // Вестник Саратовского госагроуниверситета им. Н. И. Вавилова. - 2013. - № 2. - С. 45-46.
- Технология выращивания форели на Таинтинском водохранилище в Восточно-Казахстанской области / Д. К. Жаркенов, А. Н. Неваленный, К. Б. Исбеков, С. Ж. Асылбекова, Т. С. Садыкулов, С. М. Ануарбеков, Н. С. Бадрызлова // Вестник Астраханского государственного технического университета. Серия: Рыбное хозяйство. - 2017. - № 4. - С. 85-94.
- Горина, М. А. Моделирование динамических систем / М. А. Горина, А. В. Горин, Д. Л. Козырев // Научно-методический электронный журнал "Концепт". - 2017. - Т. 31. - С. 726-730. - URL: http://e-koncept.ru/2017/970160.htm.
- Aqualine Midgard System [Электронный ресурс]. - URL: http://www.aqualine.no/en/products/. - (10.01.2019).
- Патент RU 160 857. Садок для промышленного выращивания рыбы с системой подъёма сетной камеры / Е. А. Тихонов, В. А. Анчеев, И. А. Маганов, А. Е. Курицын; опубл. 10.04.2016.
- Fish Farm Nets [Электронный ресурс]. - URL: http://crnetloft.ca/fish-farm-nets. - (09.01.2019).
