Обоснование конструктивного исполнения робота-манипулятора для выполнения погрузочно-разгрузочных работ

Автор: Н.В. Бабоченко, В.А. Краснов, С.А. Зубрилина
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 3 (48), 2025 года.
Бесплатный доступ
В статье рассмотрены конструкционные особенности робота- манипулятора, имеющего несложное исполнение грузонесущего органа, представленного в виде силовых линейных приводов и балки. Базируясь на литературные источники, приведена характеристика имеющихся манипуляторов и роботов-манипуляторов, которые используются при выполнении погрузочно-разгрузочных работ на производстве. Цель работы состоит в обосновании конструктивных особенностей предложенного робота- манипулятора и его области применения. Предметом исследования являлись конструктивные составляющие предложенного робота-манипулятора, оригинальность которого подтверждена заявкой на изобретение и разработанная для него система управления. Конструктивные составляющие предложенного робота-манипулятора просты в изготовлении. Система управления, предложенной конструкции робота-манипулятора, предполагает использование существующих доступных систем компьютерного зрения. Рассмотрена система технического зрения применительно к разработанному роботу- манипулятору, направленная на решение задач позиционирования робота-манипулятора в заданном положении. С этой целью приводится описание блочной системы компьютерного зрения. Компьютерное зрение необходимо для того, чтобы вести захват изображений и анализ. Установлено, что система управления предложенного нами конструктивного исполнения робота-манипулятора решает задачу позиционирования робота-манипулятора в заданном положении, а конструкция, отличающаяся своей простотой в изготовлении, позволит сэкономить материальные ресурсы. Цель искомого управления заключается в одновременной реализации двух задач, а именно, привести робот-манипулятор в заданное положение и погасить скорости в конечном положении. Определено, что использование разработки робота-манипулятора позволит снизить материальные затраты на его изготовление, а так же свести к минимуму возможность ошибок при выполнении работ. Приведены доводы, о целесообразности использования предложенной конструктивной разработки робота-манипулятора с техническим зрением на производстве, с указанием конкретных регионов России.
Датчик, робот-манипулятор, техническое зрение, блок, конструкция, система управления
Короткий адрес: https://sciup.org/147252271
IDR: 147252271 | УДК: 621.865.8
Rationale for the design of a robot-manipulator for loading and unloading operations
This article examines the design features of a robot-manipulator with a simple loadbearing element consisting of linear actuators and a beam. Based on literature sources, the characteristics of existing manipulators and robotic manipulators used in industrial loading and unloading operations are presented. The purpose of this work is to justify the design features of the proposed robot-manipulator and its application areas. The subject of this study was the design components of the proposed robotic manipulator, the originality of which is confirmed by an invention application, and the control system developed for it. The design components of the proposed robotic manipulator are simple to manufacture. The control system of the proposed robotic manipulator design utilizes existing computer vision systems. A computer vision system for the developed robotic manipulator is considered, aimed at solving the problem of positioning the robotic manipulator in a given position. For this purpose, a description of the block computer vision system is provided. Computer vision is necessary for image capture and analysis. It was established that the control system of the proposed robotic manipulator design solves the problem of positioning the robotic manipulator in a given position, and the design, distinguished by its simplicity of manufacture, will save material resources. The goal of the desired control is to simultaneously accomplish two tasks: bringing the robotic manipulator to a given position and damping its speeds in the final position. It was determined that the use of the proposed robotic manipulator will reduce manufacturing costs and minimize the possibility of errors during operation. Arguments are presented for the feasibility of using the proposed robotic manipulator design with machine vision in production, with specific regions of Russia indicated.
Текст научной статьи Обоснование конструктивного исполнения робота-манипулятора для выполнения погрузочно-разгрузочных работ
наименьшими затратами человеческого труда и могут быть автономным или интегрировано в многофункциональный роботизированный комплекс. В конструкцию роботов всегда входят элементы, позволяющие совершать вращательные или поступательные движения. Причиной внедрения роботизированной техники является необходимость снизить затраты на производстве. Робот-манипулятор - это точное оборудование, используя его удаётся не просто снизить затраты, но и свести к минимуму возможность ошибок. Внедрение современной техники позволяет повысить безопасность условий труда.
С каждым годом роботы-манипуляторы охватывают все большие отрасли производства и на скорость распространения этого оборудования в первую очередь влияет его доступная цена. С учётом значительной экономии, которую гарантирует автоматизация процессов, все вложения абсолютно оправданы. К тому же использование роботов-манипуляторов повышает качество продукции.
Существует множество конструкций роботов-манипуляторов [1-11] и мы в свою очередь хотим представить робот-манипулятор базируемый на известных разработках [1, 2].
Материалы и методы исследования. Предлагаем к рассмотрению конструктивную составляющую робота-манипулятора [3] (рисунок 1).
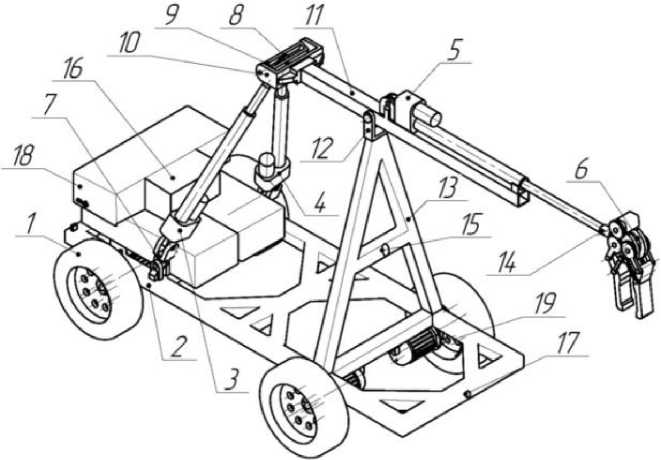
Рисунок 1 - Модель робота-манипулятора
Конструктивно разработка, представленная на рисунке 1, состоит из четырех ведущих колес 1, закрепленных посредством ступицы на электродвигателях 19. Данные электродвигатели жестко закреплены на платформе 2, выполненной из профильной квадратной трубы размерами 80х80х5 (ГОСТ 30245-2003). На платформе расположены исполнительные звенья, выполнение в виде силовых приводов 3, 4, 5 и управляемый грузозахватный орган 6.
Два силовых линейных привода 3, 4 крепятся к основанию 2 самоходного шасси 1 посредством поворотных опор 7, а штоками с наконечниками 8 сходятся в общей точке подвижного крепления 9, которое посредством вилки 10 крепится на оси балки 11.
Для жесткости конструкции, балка 11 опирается посредством опорной вилки 12 на упор 13, соединенные между собой жесткой соединительной планкой. Упор 13 имеет жесткое крепление с поверхностью основания 2. На поверхности балки 11 закреплено основание исполнительного звена выполненного в виде силового линейного привода 5.
Шток упомянутого силового линейного привода 5 наконечником 14 соединен с управляемым грузозахватным органом 6.
На поверхности жесткой соединительной планки упора установлен оптический датчик 15, который передает сигнал на блок управления 16. Блок управления 16 задает величину перемещения силовым линейным приводам 3, 4, 5 и контролирует слаженность их работы.
На поверхности основания 2 в передней части самоходного шасси 1 установлен датчик угла наклона 17, который фиксирует угол наклона самоходного шасси 1 к поверхности земли, по которой перемещается.
Питанием для совместной работы всех органов движения робота манипулятора является аккумуляторная батарея 18 которая располагается в задней части основания 2 для распределения тяжести при подъемах грузов.
Рассмотрим принцип работы робота-манипулятора. Самоходное шасси, перемещающееся по поверхности земли, распознает необходимый объект для выполнения операции его перемещения благодаря оптическому датчику, который передает сигнал на электронный блок управления, а тот задает необходимую величину перемещения штокам силовых линейных приводов и контролирует слаженность их работы совместно с управляемым грузозахватным органом, в виде ножничного захвата, лапы захвата которого в форме ножниц захватывают и перемещает объект в указанное место после получения сигнала от блока управления и передаваемой работы от зацепления зубчатых колес.
Поочередной работой силовых линейных приводов, штоки которых сходятся в шарнире, имеющем три степени свободы, размещенном на оси внутри полого прямоугольного соединения вилки, достигается расширенная зона обслуживания управляемого грузозахватного органа, который представляет собой ножничный захват, состоящий из блока управления, зацепления зубчатых колес и лап захвата в форме ножниц. Работой силового линейного привода, соединенного с управляемым грузозахватным органом достигается регулирование длины выноса лап захвата в форме ножниц. Работой силовых линейных приводов достигается перемещение противовеса на роликовых опорах, размещенных внутри направляющих балок.
Противовес, во избежание переворачивания самоходного шасси, перемещается по поверхности основания на величину, зависящую от массы поднимаемого и перемещаемого грузозахватным органом груза.
На поверхности основания в передней части самоходного шасси установлен датчик угла наклона, который фиксирует угол наклона самоходного шасси к поверхности земли, по которой перемещается. В случае превышения заданного значения угла наклона самоходного шасси к поверхности земли, по которой идет перемещение, от датчика угла наклона передается сигнал на блок управления и движение самоходного шасси останавливается и отдается команда на изменение траектории движения самоходного шасси в сторону от возвышенности, угол подъёма которой превышает заданное значение, чтобы предотвратить опрокидывание робота-манипулятора.
Компьютерное зрение должно вести захват изображений и анализ. Для нас имеет смысл использовать уже существующие доступные системы компьютерного зрения [4]. Среди подобных систем сразу же просится вспомнить одну из самых известных: OpenCV, представляющую собой комплекс алгоритмов для реализации компьютерного зрения. Комплекс представлен модулями с узкоспециализированным функционалом: математического анализа, обработки изображений, графического интерфейса пользователя, ввода/вывода изображений и видео, ряда других компонентов. Общее количество компонентов превышает 2500, что позволяет решать достаточно сложные задачи.
Искомые управления должны одновременно реализовывать две задачи: привести робот- манипулятор в заданное положение и погасить скорости в конечном положении. Дополнительные ограничения, накладываемые на его движения, позволили найти программные управления, используя принцип максимума Понтрягина [12]. В этом подходе энергии управлений на начальном участке движения используются для разгона робота, а на конечном участке - для его торможения. Сложность построения управлений связана с необходимостью достижения заданного положения. В данной работе предлагается времена разгона и торможения уменьшить. На участках разгона и торможения используются простое программное управление, реализуемое прямоугольными импульсами. На основном участке движения манипуляционный робот движется, используя внутреннюю энергию. Стратегия управления состоит в переводе робота из малой окрестности начального положения в малую окрестность заданного положения за счет его собственной внутренней энергии.
Результаты и обсуждение. Данные от системы технического зрения обрабатываются на микрокомпьютере Raspberry Pi 3 Model B, который основан на процессоре Broadcom BCM2837 с четырьмя 64-битными ядрами ARM Cortex A-53, работающими на частоте 1.2 ГГц; он имеет 1 Гб оперативной памяти, порты USB, RS-232, I2C и GPIO, встроенный блок Wi-Fi. Использование в системе управления микрокомпьютера позволяет реализовать достаточно сложные алгоритмы управления, поддержку WiFi и построить системы технического зрения. Энергопотребление у Raspberry Pi низкое, что очень важно для случая автономной мобильной роботы, и при достаточной производительности радует невысокой ценой.
Система управления работает с исполнительными механизмами системы, представляющей собой три силовых линейных привода, самоходное шасси; осуществляет текущий контроль состояния силовых линейных приводов и самоходное шасси, реализует программно-заданные законы перемещения рабочих органов.
Управление силовыми линейными приводами осуществляется с помощью контроллера положения. Центральным элементом контроллера положения является вычислительное ядро, реализующее функции автоматического управления, на базе микроконтроллера STM32F100RBT6. Возможностей данного микроконтроллера достаточно для реализации вычислений системы автоматического регулирования.
Поддержка работы с сетями WiFi реализована с помощью модуля ESP8266-F12. Данный модуль имеет достаточно обширную систему портов ввода/вывода, и на базе этого модуля можно реализовать контроллер положения, однако внутренне ПО чувствительно к операциям, вносящим задержки в работу стека, и длительные операции неприемлемы (например, обработка массива значений, полученных с АЦП). Поэтому данный модуль занимается только организацией работы с сетью. Взаимодействие с ведущим контроллером осуществляется по интерфейсу USART на скорости 115200 б/с. Непосредственное управление направлением и скоростью движения двигателя с учетом приведенных ранее параметров возложено на двухканальный мостовой усилитель мощности на интегральной схеме VNH3SP30. Мостовой усилитель работает с напряжением в диапазоне 7–36 В, а рабочий ток может достигать 30 А на канал. В схеме реализована защита от подачи высокого напряжения (при уровне напряжения свыше 36 В схема просто отключается), а так-же – защита от перегрева. При длительной работе с током 30 А (около 35 с) защита срабатывает. Мониторинг потребляемого электродвигателем тока осуществляется с помощью датчика ACS712. Принцип его работы основан на эффекте Холла. Максимальный измеряемый ток может достигать 30 А при напряжении до 354 В постоянного тока, а шаг измерения составляет 66 мВ/А. Гарантированный уровень шума в показаниях составляет 7 мВ, что можно устранить, применив методы фильтрации.
Суммарное пиковое потребление тока основных компонентов системы не превышает 400 мА при напряжении 3,3 В. Для питания от бортовой сети 12 В применен понижающий до 5 В импульсный стабилизатор LM2596, с максимальным выходным током до 3 А. Напряжение 5 В применяется для питания цифровой части энкодеров и дальномеров. Для понижения до 3,3 В применяется линейный стабилизатор AMS1117, с максимальным выходным током до 800 мА.
Выводы. Приведенная конструкторская характеристика робота-манипулятора доказывает, что простота в изготовлении позволит запустить данную конструкцию в производство. За счет использования электродвигателей и аккумуляторных батарей представленная нами в статье разработка сможет похвастаться и своей экологичностью при своей конструктивной простоте. Это значит, что сможет безопасно использоваться в закрытых складских помещениях и на заводах для перемещения тяжелых грузов. Рассматривая возможности представленной нами разработки, отметим, что есть возможность использования в промышленных регионах России таких как, Ленинградской, Самарской, Московской и Нижегородской областях. Так же есть возможность использования, в регионах, где применяют уже беспилотные тракторы, таких как в Краснодарском крае, Ульяновской и Псковской областях.
