Обоснование конструктивных параметров органов захвата и ориентирования бункерного загрузочного устройства с радиальными карманами при активном ориентировании асимметричных заготовок тел вращения

Автор: А.Л. Бахно, И.В. Пузиков, Е.В. Пантюхина, С.А. Васин
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 2 т.28, 2026 года.
Бесплатный доступ
В статье рассматривается этап проектирования механических дисковых бункерных загрузочных устройств, на котором осуществляется процесс разработки ограничений на параметры рабочих органов устройства,. Представлены и подробно описаны критерии стабильного и надежного функционирования бункерных загрузочных устройств при реализации процессов захвата, ориентирования и выдачи асимметричных заготовок, представляющих собой тела вращения, при автоматизации процессов загрузки в массовых производствах. На примере усовершенствованного универсального бункерного загрузочного устройства с радиальными карманами, кольцевым ориентатором и копиром, реализующим процесс активного ориентирования, были подробно описаны условия, при которых карманы устройства будут захватывать заготовки в правильном положении с наиболее высокой вероятностью, удерживать неправильно запавшие заготовки до начала расположения копира, кольцевой ориентатор обеспечит захват карманом заготовки только в правильном положении, копир приведет неправильно захваченную заготовку в требуемое ориентированное положение. Представлены полученные математические выражения для описания условий правильно функционирования устройства.
Ограничения на параметры при захвате, ограничения на параметры при ориентировании, бункерное загрузочное устройство, ориентирование заготовок
Короткий адрес: https://sciup.org/148333488
IDR: 148333488 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2026-28-2-85-91
Substantiation of Structural Parameters of Gripping and Orienting Devices of Hopper Feeding Device with Radial Pockets at Active Orienting of Asymmetric Workpieces of Rotation Bodies
The article discusses the design stage of mechanical disk hopper feeding devices, at which the process of developing restrictions on the parameters of the working elements of the device is carried out. Criteria for stable and reliable functioning of hopper feeding devices in the process of gripping, orienting and dispensing asymmetric workpieces representing solids of revolution are presented and described in detail during automation of loading processes in mass production. Using the example of an improved universal hopper feeder with radial pockets, the ring orientator and the cam implementing the active orienting process, the conditions have been described in detail, at which the pockets of the device will grip the workpieces in the correct position with the highest probability, hold improperly sunk workpieces before the location of the cam, the circular orientator will ensure that the pocket grips the workpiece only in the correct position, the cam will bring the improperly gripped workpiece to the required oriented position. The obtained mathematical expressions are presented to describe conditions for correct functioning of the device.
Текст научной статьи Обоснование конструктивных параметров органов захвата и ориентирования бункерного загрузочного устройства с радиальными карманами при активном ориентировании асимметричных заготовок тел вращения
Одним из основных этапов проектирования механических дисковых бункерных загрузочно-ориентирующих устройств (БЗУ) для штучных заготовок (изделий, деталей, предметов обработки и т.п.) при автоматизации процессов загрузки в массовых производствах, является разработка ограничений на параметры органов захвата и ориентирования [1, 2]. Реализация данного этапа направлена на обеспечение стабильного и надежного функционирования БЗУ, основным критерием которого является выдача из БЗУ в приемник только ориентированных в правильном положении заготовок [3]. Кроме этого при выполнении рабочими органами захвата и ориентирования в БЗУ не должно происходить заклинивание, которое может возникать, например, при попадании в карман нескольких заготовок или проникновении в зону ориентирования заготовок, которые расположились над частично или полностью запавшей в карман заготовкой. Также при работе БЗУ может возникать износ рабочих поверхностей из-за постоянного ворошения или движения заготовок в области рабочих органов БЗУ, что обуславливает необходимость разработки БЗУ, в которых имеется возможность регулировки размеров органов захвата и ориентирования без необходимости изготовления изношенных деталей БЗУ [4, 5].
В связи с вышеизложенным разработка диапазонов оптимальных значений параметров органов захвата и ориентирования при проектировании новых или усовершенствованных БЗУ является важнейшим этапом [6–10]. К параметрам БЗУ, для которых требуется разработка диапазонов конструктивных ограничений, являются геометрические размеры органов захвата и ориентирования (например, длина, ширина и высота кармана, угол начала процесса ориентирования, зона ориентирования, зона захвата, параметры разгрузочного окна и т.д.) и кинематические параметры захватывающих органов (карманов) БЗУ (окружная скорость органов захвата или, другими словами, частота вращения диска).
Ограничивать правильное функционирование БЗУ могут три значения окружной скорости. Первое из них - предельное значение окружной скорости по захвату (при которой ни одна заготовка не будет захвачена карманов в случае ее высоких значений); второе - по ориентированию, когда заготовки или не успеют выпасть из карманов в процессе пассивного ориентирования обратно в зону захвата, или не успеют переориентироваться при реализации в БЗУ активного ориентирования; третье - по выдаче, когда предварительно правильно сориентированные заготовки не успеют выдаться из БЗУ в разгрузочное окно и начнут заклиниваться в нем (выпадение под действием силы тяжести или каких-либо внешних сил) [11-13]. Третье ограничение может быть обусловлено не только высоким значением окружной скорости, но и переполнением приемника, при котором для правильно сориентированной заготовки из кармана будет некуда выдаться. Поэтому необходимо учитывать в совокупности как оптимальный размер (емкость) накопительно-передающего устройства, в который БЗУ через приемный лоток выдает заготовки, так и подбирать окружную скорость карманов, при которой из БЗУ будет выдано столько заготовок, сколько требуется для технологического оборудования, на которое осуществляется подача сориентированных заготовок [4].
Не для всех типов механических БЗУ есть необходимость определять значения всех трех скоростей, в том числе и при учете емкости накопителя. Этапы разработки ограничений на параметры БЗУ будут определяться способом захвата и ориентирования заготовок в БЗУ, положением заготовки, в котором они будут выдаваться из карманов в приемный лоток, и другими параметрами.
ОГРАНИЧЕНИЯ НА ПАРАМЕТРЫ ОРГАНОВ ЗАХВАТА И ОРИЕНТИРОВАНИЯ БУНКЕРНОГО ЗАГРУЗОЧНОГО УСТРОЙСТВА С РАДИАЛЬНЫМИ КАРМАНАМИ ПРИ АКТИВНОМ ОРИЕНТИРОВАНИИ
Рассмотрим обоснование параметров органов захвата и ориентирования заготовок, асимметричных по торцам, в универсальном БЗУ с радиальными карманами, кольцевым ориентатором и копиром, реализующим процесс активного ориентирования [14].
Для обеспечения стабильной работы усовершенствованного устройства необходимо разработать конструктивные ограничения на его органы, которые должны разрабатываться исходя из нижеследующего: карман должен захватить заготовку в правильном положении полностью и с наиболее высокой вероятностью; кольцевой ориентатор должен препятствовать захвату карманом заготовки в неправильном положении и способствовать захвату заготовок в правильном положении; копир должен иметь свободный доступ к неправильно запавшей в карман заготовке, чтобы смочь ее подхватить и переориентировать; карман должен удерживать неправильно запавшую заготовку в верхней части бункера до начала расположения копира, предотвратив выпадение из кармана [15].
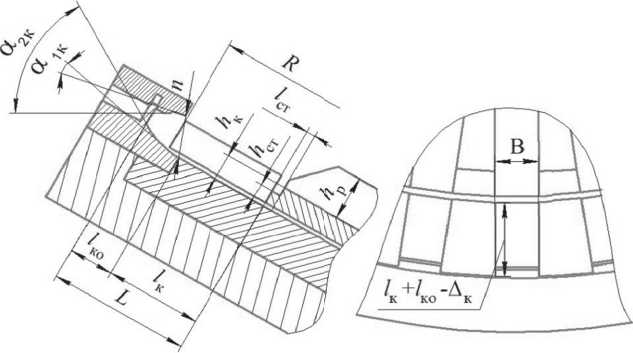
Чтобы карман захватил заготовку в правильном положении полностью и с наиболее высокой вероятностью необходимо правильно подобрать размеры кармана: L (общая длина), B (ширина) и h к(высота). Длина кармана может быть описана суммарной длиной l к плоской части кармана (дно основания) и глубиной паза l ко регулируемого кольцевого ориентатора: L = l к + l ко.
Во-первых, длина кармана должна быть такой, чтобы в нем могла разместиться заготовка длиной 1, то есть L min > l . В этом случае длина l к должна быть больше длины цилиндрической части заготовки l к > l ц (рис. 1).
Во-вторых, в карман не должна попасть другая заготовка в положении стоя, что определяется формой и размерами ее асимметричного торца. Чем меньше диаметр асимметричного торца d ассП, тем короче должен быть карман, то есть l ™х < l ц + d ^сП • Данный параметр также необходимо анализировать с учетом длины l ст и высоты h ст ступеньки на вращающемся диске, то есть l cт + А < d “’“.
Ci dll
В-третьих, длина кармана ограничена проникновением в карман неправильно запавшей заготовки на глубину, при которой копир не сможет подцепить ее для переориентирования. Для этих целей должно быть соблюдено условие ( l к + 1 ст) 2 + h 2< z 2 (рис. 2).
Таким образом, получаем совокупность ограничений на длину L кармана:
L min > l при условии, что l к > l ц и l ко > l d CC;
I /шах > .mm 7 Л .min, m lк < lц + d dec и lст + А < ddec ; (1)
. ( l к + 1 ст )2 + h l < z 2-
Принимается значение длины l к = l ц + А , которое удовлетворяет условиям (1).
Ширина кармана В = d ^ + А к принимается максимально возможной, так как в данном случае будет наиболее высокое значение вероятности захвата заготовки карманом (см. рис. 1, а). Огра-
a
б
Рис. 1. Расчетные схемы для разработки конструктивных ограничений на параметры рабочих органов БЗУ (а) при исключении заклиниваний (б)
ничение ширины B кармана (см. рис. 1, б, вид А) обусловлено западанием другой заготовки асимметричным торцом, то есть В < d ^ + d ™Cn.
Высоту кармана принимаем достаточной для захвата заготовки и не превышающей ее наибольший диаметр, то есть d ^ > h K > 0,5 d ^ .
Чтобы регулируемый кольцевой ориентатор препятствовал захвату карманом заготовки в неправильном положении, его максимальный размер должен быть меньше максимального диаметра заготовки (в данном случае диаметра цилиндрической части) n max < d 1 (см. рис. 2). При загрузке группы заготовок параметр pc будет подбираться для той заготовки, у которой диаметр цилиндрического торца меньше всех
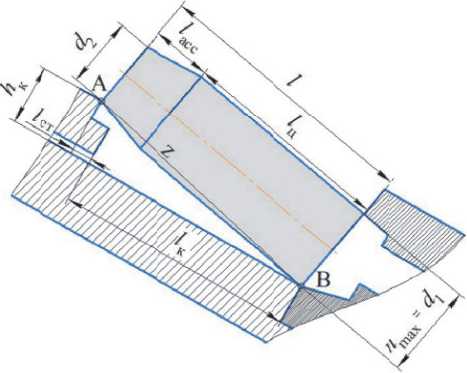
Рис. 2. Ограничение длины кармана проникновением неправильно запавшей заготовки
остальных.
Чтобы способствовать полному захвату заготовок в правильном положении глубина паза l ко регулируемого кольцевого ориентатора должна быть больше длины асимметричного торца заготовки l K0 > l acc. Глубина паза ограничений по длине больше не имеет, так как не участвует в процессе захвата (поэтому можно принять постоянной l K0 ® l acc ), поэтому наиболее значимым параметром для захвата и переориентирования является параметр l к .
Форма и угол а к внутри паза кольцевого ориентатора (см. рис. 1, а) регулируется в зависимости от группы загружаемых заготовок и его изначальный профиль выбирается по той заготовке, асимметричный торец которой имеет наибольший размер и форму.
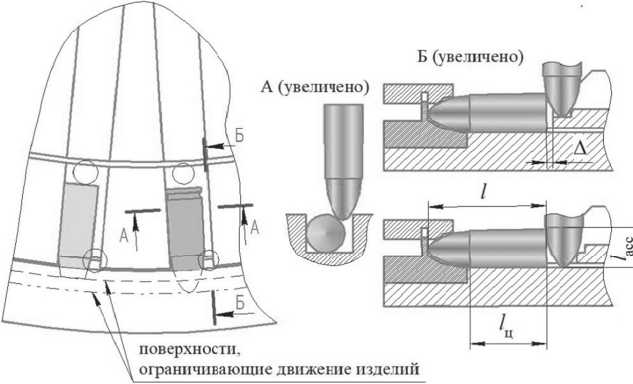
Чтобы копир имел свободный доступ к неправильно запавшей в карман заготовке, для ее подхвата с целью переориентирования на периферии вращающегося диска предусмотрена ступенька с параметрами lст и hст. Выбор данных параметров осуществляется исходя из описанных выше условий. При разработке копира все параметры подбираются индивидуально для каждого случая эмпирическим путем и дорабатываются в процессе пуско-наладки устройства, но нужно учитывать следующие факторы (рекомендации).
Высота кронштейна / ^коп > l (рис. 3) должна обеспечивать свободное прохождение заготовки при переориентировании под ним. Первоначальная форма копира выбирается траекторий наиболее оптимального движения заготовок по копиру для переориентирования, и в дальнейшем регулируется и настраивается при пуско-наладке с учетом следующих рекомендаций. Высота плужка h 2коп должна обеспечивать подъем ориентируемой заготовки в вертикальное положение и при этом позволять западать под плужок во время переориентирования. Вылет плужка l коп в верхней точке вращения диска должен обеспечивать свободное прохождение заготовки между плужком и ориен-татором, а также ее опрокидывание при переориентировании.
Чтобы карман удерживал неправильно запавшую заготовку в верхней части бункера до начала расположения копира, предотвратив ее выпадение из кармана, необходимо определить минимальный от вертикальной оси угол а коп, на котором должен располагаться копир (рис. 4).
Составим систему уравнений в виде условий статического равновесия заготовки в кармане в начальный момент времени, когда сумма моментов всех сил относительно опор A и B, а также их проекций на оси ОY и OX равна нулю. При этом разложим силу тяжести на составляющие в зависимости от угла наклона а д диска G ^ = G cos а д и G 2 = G sin а д. Преобразуем силы трения: F по диску, F 2 по дну кармана, F 3 по боковой поверхности кармана в виде произведения коэффициентов трения µ на соответствующие реакции опор N 1 , N 2 и N 3 . Сила нормальной реакции боковой поверхности кармана располагается в другой плоскости и определяется как N 3 = G 2 sin а коп . Тогда
S M A = - G i ‘ l A + G 2 ( cos а коп - ^' sin а коп ) ‘ l A + N 2 ‘ [( l к + l ст ) + Ц ■ h к ] = 0
BB B B
S M B = N 1 ' [ ^' l F i l N i ] + G i ' l G i + G 2 (cos а коп Ц ' sin а коп ) ' F = 0 ’
S F OY =- G1 + N 2 + N i (cos( a i + в ) — Ц ■ sin( a i + в )) = 0^
S FOX = G2 (cos акоп - Ц ■ sin акоп ) - Ц ■ N2 - Ni (Ц ■ cos(ai + в) + sin(ai + в)) = 0, где IA - плечо силы Gi относительно опоры А; IB = L - lA - плечо силы Gi относительно Gi Gi к Gi опоры В, м; lA - плечо сил G2 и F = G2 ■Ц sin акоп относительно опоры A , м; IB = h. + lA 1 3 B ^3ч
-
- плечо сил G 2 и F 3 относительно опоры А , м; l p - плечо силы F i относительно опоры В , м;
, BL
-
1° - плечо силы N относительно опоры В , м (рис. 5).
-
N i
Выразим из третьего и четвертого уравнений систем силу N2, перенеся в правую часть урав нений все параметры с силой Ni, а затем, разделив правую часть уравнений на Ni, получим
в котором
A = Ц ■ sin( « i + в ) - cos( « i + в ) ; Ц ■ cos( « i + в ) + sin( « i + в ) ’
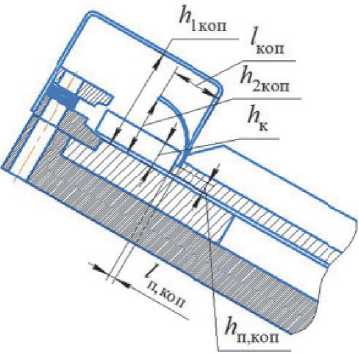
Рис. 3. Выбор параметров копира
^ коп cos а коп Ц ■ sin а коп ’
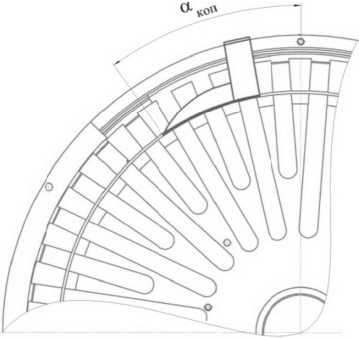
Рис. 4. Схема минимального расположения копира
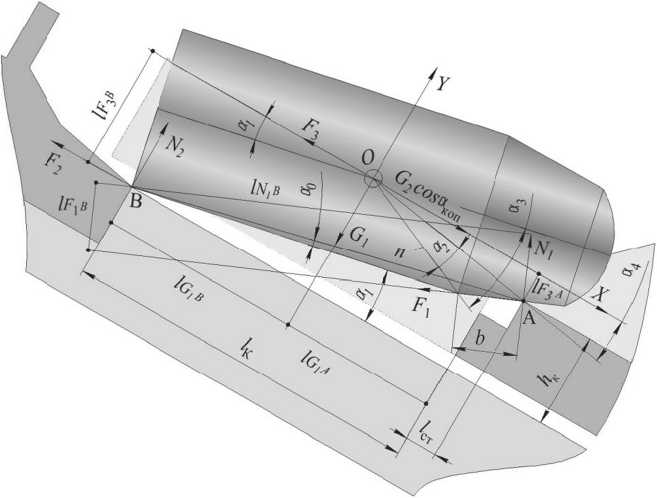
Рис. 5. Схема расположения заготовки в кармане перед выпадением
С = 1 + A -Ц . Полученные для силы N 2 выражения подставим в первое уравнение систем. Тогда
после преобразований имеем:
A - sin ап - В. + cos ап
- cos ал- l A + sin ал - l A - В. +------------------------- - D = 0 ,
Д G - — F ^ кон с 7
где D = ( 1к + 1 ст) + Ц - h к . Выделим все коэффициенты, относящиеся к показателю В коп , получим
В коп
л cos а cos а-IA
Д G
------------ —-.-------= Z. Тогда л A-smа sin а - ia +
Д F3
cos а коп -Ц- sin а коп = Z. Обозначив
cos а = х коп
и
sin а коп = 1 - - х 2
получим квадратное уравнение, корнем которого будут значения
х 1,2
2 Z ± 2^Z 2 - (1 + Ц 2)( Z 2 -Ц2) 2(1 + Ц 2)
. Тогда а коп = arccos( х -,2 ) .
Решение полученных уравнений, в том числе определения плеч сил и всех других параметров расчетной схемы, реализовано в среде MathCAD .
В качестве примера на рис. 6 приведены результаты моделирования значений угла акоп в зависимости от коэффициента трения. Графики позволяют выбрать граничное значение угла расположе- ния копира. Для универсального устройства, когда предполагается использовать его для нескольких видов изделий, отличающихся различными коэффициентами трения, нужно выбрать максимально возможный по значению угол акоп. Как показано на графике, копир должен располагаться не позд
нее, чем а коп = 50 ° ...7 ° в зависимости от коэффициента трения при его увеличении.
Таким образом, начальная часть копира в верхней части бункера должна располагаться раньше этого угла. В противном случае заготовки начнут выпадать из кармана до процесса их переориентирования.
ЗАКЛЮЧЕНИЕ
Проектирование размеров захватывающих и ориентирующих органов усовершенствованного устройства в соответствии с полученными
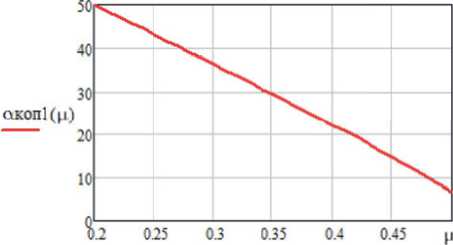
Рис. 6. Результаты моделирования значений угла а коп (град.)
конструктивными ограничениями позволит гарантированно обеспечить стабильное функционирование устройства при загрузке различных заготовок.
Конструктивные ограничения на геометрические параметры органов захвата и ориентирования позволят обеспечить захват заготовки в правильном положении полностью и с наиболее высокой вероятностью; заготовки в неправильном положении благодаря разработанной конструкции регулируемого кольцевого ориентатора не будут полностью западать в карман, а будут переориентироваться в верхней части бункера устройства; копир будет иметь свободный доступ к неправильно запавшей в карман заготовке для ее подхвата и переориентирования, а его расположение будет находится там, где заготовка будет еще находиться в кармане, не выпав из него.
