Обоснование способа адаптивного управления процессом доения коров

Автор: Забродина Ольга Борисовна, Мартыненко Ольга Ивановна
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Механизация и электрификация животноводства, растениеводства
Статья в выпуске: 1 (9), 2010 года.
Бесплатный доступ
Получено математическое описание процесса молоковыделения доильным аппаратом отсасывающего типа. По результатам моделирования предложен способ адаптивного управления процессом доения.
Молоковыделение, технология, доение, процесс, доильный аппарат, давление
Короткий адрес: https://sciup.org/140203997
IDR: 140203997 | УДК: 637.124.631.3
The development of the way of adapted control of cow milking process
Mathematical description of milking process with the help of a milking apparatus of drawing type has been got. According to the designing results the way of adapted control of cow milking process is offered.
Текст научной статьи Обоснование способа адаптивного управления процессом доения коров
Одним из актуальных вопросов в области машинного доения является разработка адаптивных технологий управления процессом доения.
Важным подходом к управлению процессом машинного доения является изменение рабочих параметров доильного аппарата, в частности глубины подсоскового вакуума, в зависимости от интенсивности молокоотдачи в каждой фазе доения по долям вымени. При этом в зависимости от интенсивности молокоотдачи в каждой фазе доения поддерживается определённое значение глубины вакуума под соском, способствующее безопасному и наиболее полному молоковыведению [1]. Анализ кривых молоковыведения [2] показал, что для повышения эффективности машинного доения необходима адаптация процесса доения по долям вымени, то есть выдаивание животных в индивидуальном режиме с учетом особенностей переходных характеристик каждой доли вымени.
Путём математического описания физиологических процессов в работах [1], [2] получены математические модели узлов доильного аппарата.
При дальнейшем анализе использованы:
– математическая модель вымени
Т3 -+ + P = T4 -г + kP + кзРi -kp - ksSn; ц a nn dt dt
T5 ^”7 + pc = T6 ~~В + kgpe + T7 —p + k 10Sn + T8 pnr — k 11 pn + k 12рц • dt dt dt dt ;
– динамическая модель доильного аппарата dp
T - , + P 4 = k 18 P 2 ;
dt dp
T1 dt + pM = k І^сФ .1 + k 2 pk 1 + k 3асф.2 + k 4 pk 2 + k 5^сф ..3 + k 6 pk 3 + k 7^сф .4 + k 8 pk 4 + dp
+ k 9aa + k 19 рш + T2 —— ; dt dpс
T 3 J, + p c k 10 p у ;
dt dp
T 4 -T" + p 3 = k 1i a 8 + k 12 p уп . + k 13 p 2 ;
dt dpdp
T5 + p 2 = k i4a8 + k 15p 3 + k i6a9 + k 17p 4 + T6
dtdt
– постоянные времени;
k 1 , k 2 , k 3 , k 4 , k 5 , k 6 , k 7 , k 8 , k 9 , k 10 , k 11 , k 12 , k 13 , k 14 , k 15 , k 16 , k 17 , k 18 , k 19 –
где Т 1 , Т 2 , Т 3 , Т 4 , Т 5 , Т 6, T 7 , Т 8 фициенты;
a 8 , a 9 - дроссели;
p – мгновенные значения давлений пульсатора;
p a – атмосферное давление;
α сф1-4 – проводимости сфинктеров сосков;
p k 1-4 – давление в молочной и сосковой цистерне вымени;
-
p ц – давление в цистерне вымени;
-
p н – наружное давление, действующее на цистерну вымени;
-
p c – давление, оказывающее воздействие на соски вымени;
-
p в – глубина вакуума;
P п – значение давления под соском;
S п – площадь соска, на которую действует давление p c ;
Р м – давление, с которым молоко вытесняется из альвеолярной ткани;
Р у – соответственно давление в управляющей камере пульсатора.
На основании анализа моделей, их идентификации были получены значения постоянных времени и коэффициентов, являющихся статистическими характеристиками. Полученные математические модели послужили исходным материалом для построения компьютерных моделей, разработанных в среде Matlab.
На основании анализа результатов компьютерного моделирования и исследований физиологов был предложен способ адаптивного управления процессом дое- передаточные коэф- ния. Значения постоянных времени и передаточных коэффициентов приведены в [1].
Целью настоящих исследований являлось обоснование способа адаптивного управления процессом доения.
Такой способ адаптивного управления процессом доения, включающий выдаивание с одновременным измерением интенсивности молоковыведения и изменение длительности такта сосания в зависимости от характеристик молоковыведения, можно реализовать следующим образом. В качестве характеристик молоковыведения используют интенсивность и скорость изменения интенсивности молоковыведения.
После надевания доильного аппарата в подсосковом пространстве доильных стаканов устанавливают глубину вакуума, равную 0,8 pH . Через период времени 4 тср глубину вакуума под соском ступенчато увеличивают на значение A p и затем через период времени 4 тср по переходной характеристике интенсивности молоковы-ведения вычисляют значение постоянной времени процесса нарастания молоковыве-дения данной доли вымени т6і и скорость изменения молоковыведения на данном интервале времени.
Переходная характеристика изменения интенсивности молоковыведения q (t) в начале доения и график изменения ваку- ума под соском вымени во времени приведены на рисунке 1.
Если интенсивность молоковыведе-ния увеличилась, то глубину вакуума под соском снова повышают на Ap на период времени 4 тв1, если уменьшилась - то оставляют на прежнем уровне. Далее в про- цессе доения через каждый промежуток времени, равный 4 тв1, вычисляют скорость изменения интенсивности молокоотдачи и при ее возрастании повышают глубину вакуума под соском Ap . При этом учитывают, чтобы вакуум под соском не превышал значения, равного 1,1 p .
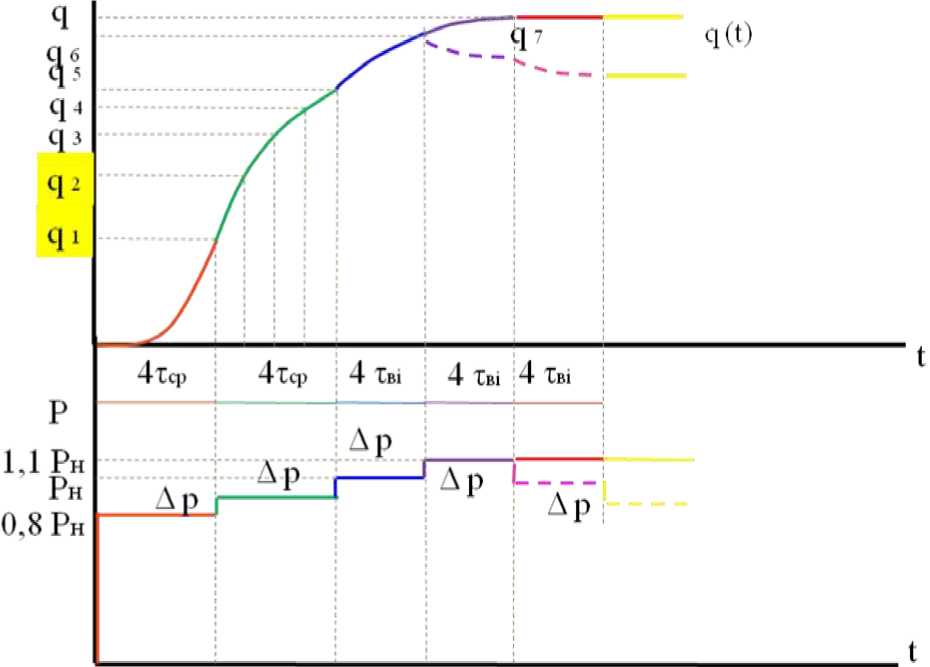
Рис. 1. Переходная характеристика изменения интенсивности молоковыведения q ( t ) в начале доения и график изменения вакуума под соском вымени во времени
При снижении интенсивности моло-ковыведения подают в подсосковое пространство воздух атмосферного давления на промежуток времени тв1 , в конце которого вычисляют постоянную времени процесса снижения интенсивности молоковы-ведения т, и под соском устанавливают номинальную глубину вакуума p .
Переходная характеристика изменения интенсивности молоковыведения q (t) в конце доения и график изменения вакуу- ма под соском вымени во времени приведены на рисунке 2.
Затем через каждый промежуток времени 4тк1 подают поочередно в подсосковое пространство доильного стакана воздух атмосферного давления на период тк, . Далее снова вакуум p .
Так продолжается до тех пор, пока интенсивность молоковыведения по доле вымени не снизится до значения, равного 3,3 г/с. Причем период времени т - сред- нее значение постоянной времени процесса нарастания интенсивности молоковыведе-ния для данной породы коров, p – номинальная глубина вакуума в подсосковом пространстве для данного типа доильного аппарата, а 0,01 pH < Ap < 0,1 pH.
На основании вышеизложенного можно сделать вывод, что для адаптивного управления доением необходимо в процес- се выдаивания каждого соска вычислять присущие именно ему динамические характеристики – постоянные времени моло-ковыведения и молокоотдачи и уточнять коэффициенты передаточных функций, внося изменения в режим управления, что обеспечит безопасное и наиболее полное молоковыведение.
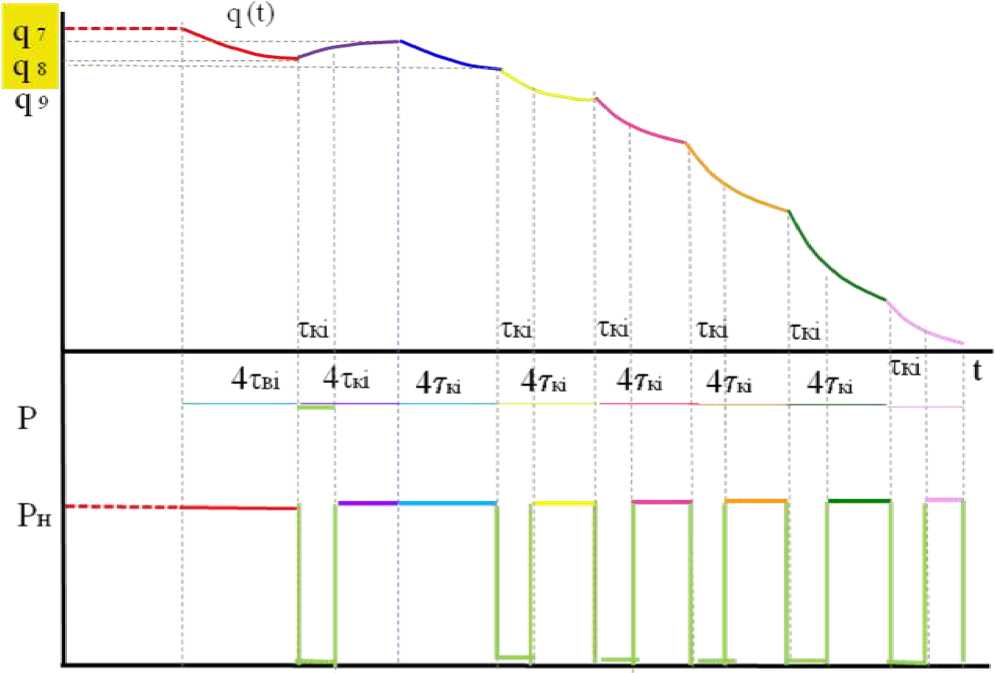
Рис. 2. Переходная характеристика изменения интенсивности молоковыведения q ( t ) в конце доения и график изменения вакуума под соском вымени во времени
Список литературы Обоснование способа адаптивного управления процессом доения коров
- Винников, И.К. Технологии, системы и установки для комплексной механизации и автоматизации доения коров [Текст]/И.К. Винников, О.Б. Забродина, Л.П. Кормановский; под ред. Л.П. Кормановского. -Зерноград, 2001. -354 с.
- Забродина, О.Б. Оценка переходных характеристик молоковыведения: сб. науч. тр. [Текст]/О.Б. Забродина, О.И. Мартыненко. -Зерноград: АЧГАА, 2006.
- Правила машинного доения коров. -М.: Агропромиздат, 1989.
