Обратная задача в управлении динамической системой

Бесплатный доступ
Предложен синтез управлений движением манипуляционного робота (МР) в точку программной траектории прямым методом Ляпунова. При построении модели динамики МР представлен единой системой, фазовый вектор которой определяется данными как механизма, так и исполнительных приводов. Такой подход к синтезу управлений базируется на использовании в качестве функций Ляпунова первых интегралов движения системы, поэтому включаемый в рассмотрение привод должен иметь конкретный физический смысл, например, электропривод постоянного тока, гидропривод с дроссельным управлением и т.д., что позволит учесть его энергию при построении функции Ляпунова. Для определенности рассмотрен МР с электроприводами, с якорным управлением, что не ограничивает возможности перехода к другому типу привода. Вывод уравнений движения МР проведен на основе полной нелинейной модели МР с использованием тензорного анализа. Исследовано на устойчивость движение промышленного МР, рабочим органом которого является тело вращения.
Модель динамики, синтез управлений, точка программной траектории, функции ляпунова
Короткий адрес: https://sciup.org/147159162
IDR: 147159162 | УДК: 681.51.011+519.87
Inverse problem in the control of dynamic system
We propose a synthesis of motion control for manipulation robot (MR) to the destination point of the programmed trajectory by the Lyapunov’s direct method. During constructing of the model of dynamics MR is presented as a unified system, whose phase vector is determined by the data of a mechanism, as well as of the actuators. This approach to the control synthesis is based on the use of first integrals of the system motion as Lyapunov functions, therefore a considered drive must have specific physical meaning, such as DC electric drive, hydraulic drive with throttle control, etc., what will enable to take drive’s energy into account in the construction of Lyapunov function. For definiteness, an MR with electric drives and the anchor control was taken as an example, which does not limit the possibility to use a different type of drive. Derivation of the MR motion equations is conducted on the basis of complete non-linear MR model using tensor analysis. The stability of movements of industrial MR with the solid of revolution as operating device is studied.
Текст краткого сообщения Обратная задача в управлении динамической системой
Задача наведения характеристической точки рабочего инструмента манипуляционного робота (МР) при выполнении им различных работ промышленного и непромышленного характера является одной из основных. Трудности при синтезе законов управления такими многомерными, нестационарными объектами определяются их нелинейными свойствами, обусловленными кинематическими и динамическими связями [1 – 3].
В работе прямым методом Ляпунова [4] решена задача перевода динамической системы из произвольной точки x o G X o С R n в точку программной траектории х ° на обрабатываемой поверхности. Уравнения динамики получены для многозвенного МР с распределенными массами звеньев, кинематическая схема которого приведена на рис. 1. Обобщенные координаты манипулятора п х , П ц , А, М = 1, 2, 3 определяются углами поворота его звеньев. Обобщенными координатами электроприводов являются заряды q ax , q bx , А = 1, 2, 3, протекающие через поперечные сечения обмоток якоря и возбуждения соответствующих электродвигателей. Модель динамики МР получена в форме уравнений Лагранжа-Максвелла [5] с индексным способом записи [6], снимающим громоздкость преобразований аналитических выражений при построении модели динамики МР.
Точка программной траектории системы определена обобщенными координатами п Х и скоростями п Х , 1 °х . Классический способ вывода уравнений динамики дает систему уравнений движения электромеханической системы
( LaXp. — L/ M yX M vp^ I ap. + L{, Y (n Y — 2M Y^ I a^ ) ~g^— П в = N X ;
. (1)
С Хц П ц + C x^v T) p. T) v + L ^ M Y^ I a^ g^ ^ 1 ав = M X '
Здесь c x^ - тензор инерции манипулятора [6], I ax = l ax , I bx = I bx , n x — обобщенные скорости системы, L aλµ , L bλµ – тензоры индуктивности, M λµ – тензор взаимной индуктивности обмо-
ток якоря и возбуждения электродвигателей приводов, I bλ – циклическая скорость, C λ,µν –
символ Кристоффеля первого рода метрического тензора c x^ , тензор L^: L^L b^v = ^,
§ V — символ Кронекера, обобщенные силы даются равенствами N x = -R x^ I a^ + U x ,
M x =
-B x^ i i ^ -
∂W p
∂η λ
νγ ∂M νβ
( n )+ L b 'nY ~g--- l ae , где R x^ , B x^ - тензоры, определяющие диссипацию
электромагнитной и механической энергий системы, соответственно, W p (n) — потенциальная
dWP (П) „ энергия манипулятора, – потенциальные силы, действующие на степень подвижно-
∂ηλ сти с номером A, Ux — управление, стесненное ограничением Ux Е Rs, Rs - ограниченное
замкнутое множество, задаваемое из ресурсов управления. Введем возмущения Anx, Anyx, AIax, AIax как разность между текущими и программными значениями обобщенных ко- ординат и скоростей. Условие стационарности движения в точке программной траектории дает следующий интеграл возмущенного движения приведенной системы [1]:
Jx = (Lax^ - LbMy.M^ - (Lax^ - LbMW^ + Lb-^Ane.
Энергия возмущенного движения системы имеет вид
J = ICxLhxn. + 2 (Lax^ - LbM^M^) △ Lx △ L^ + WpA).(3)
Построим функцию Ляпунова V как связку интегралов возмущенного движения системы [4]:
V = J + pJxJx,(4)
где ρ – положительная константа. Так как в стационарном движении (равновесии системы) все обобщенные скорости nx = 0, имеем следующее условие осуществимости стационарного движения
Г Y ° °о dM ve °о
L b M γµ I aµ ∂η λ I aβ
-
vY d M ve ° dW p
L b ^ ^ПТ Iae + 5П Т (П )
Полная производная в силу системы (1) функции V с учетом (5) после проведенных преобразований имеет вид
Выбрав управление в виде
U x = R x^ I a^ - aJ x + ^ д —p-^) (6)
с положительной константой α, имеем
VV = —B Xц n) X n) ц - Pa^J x + ^ A p a ^ ^ JJ x + ^ A p a ^ •
Исследуем устойчивость движения МР, приведенного на рис. 1. Рабочим органом является инструмент, представленный телом вращения (1 – характеристическая точка рабочего органа). Инерциальную систему координат Oxi свяжем с основанием МР, а подвижную систему координат O’xi (i = 1.2.3) - с третьим звеном, выбрав ее начало в центре инерции тела. По теореме сложения скоростей абсолютная скорость произвольной точки тела v = vo‘ + ш х r ‘ + v',
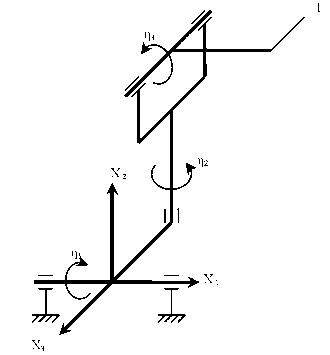
Рис. 1. Кинематическая схема МР
где v o ’ - скорость полюса O ‘ движущейся системы осей, С -ее угловая скорость, v ‘ - скорость точки по отношению к подвижной системе осей, r ‘ - радиус-вектор точки в подвижной системе осей.
Кинетическую энергию рабочего органа определим выражением
T k = 2 m (iv O 1 2
+ (w + еф) ^ o ‘ (J + еф
где $ о ‘ -тензор инерции тела, m - масса тела. Предполагая равенство экваториальных моментов инерции тела A и C относительно осей O ’ Х 1 , O ‘ х 2 , учитывая то, что $ о ‘ = AE + ( В — A)e е, где В - момент инерции тела относительно оси O ’ х 2 , преобразуем (8)
к виду
т к = 2 m ^|J o ‘ | 2 + A( | J | 2
— ше) ) + В (ше + ф) .
Отнесем слагаемые, не зависящие от угловой скорости рабочего органа ф к тензору инерции манипулятора, сформируем тензор s xp . Кинетическая энергия системы имеет вид
T = 8 Хц Т] х П ц + 2 Вф 2 + Вф ф х П X ■
Здесь ф х = a i r iX (i = 1, 2, 3, А = 1, 2, 3), r iX - тензор, связывающий проекции вектора С на оси подвижной системы координат с эйлеровыми углами п х , a i - направляющие косинусы вектора е в подвижной системе координат. Считая координату ф циклической и определив отнесенный к ф импульс p формулой p = В (ф + ф х П х ), сформируем функцию Рауса и получим следующие уравнения динамики МР с рабочим инструментом
( LaXp
— L U M yX М иц )Iap + L b^ (n Y — 2 M YP, I a^ ) “^^— П в = — R X^ I a^ + U X
^ Хц ^V p + ® X,pv n p n v + L b (n Y
M T ) 9M v3 дф х 9ф ц
M YP I ap) On x I ae + p(an p 8n x ) pp =
— В Хц т) p —
8W p (n) dn x
Здесь ^ Xp = S Xp — B^ X ^ p , & X,pV — символ Кристоффеля тензора ^ Xp . Оставим структуру функции Ляпунова (4) прежней. С учетом (4)–(6) имеем:
V = 2 ti XpW n p + 2 (L aA^ — L VY M yX M vn> I aX Мац + W p (A^) + pJ X J x -
Полная производная функции Ляпунова в силу системы (11) имеет вид
V = -B Xp Tl X ^l p. + (U X - R X^ I ap.')' ) (pJ X + ^ д А1 ац )
-
P d p X il p fl X + p|2 p il X ni p -∂η µ ∂η λ
Сумма двух последних слагаемых в выражении V равна нулю, и управление (6) обеспечивает асимптотическую устойчивость движения характеристической точки рабочего органа в точку программной траектории.
Список литературы Обратная задача в управлении динамической системой
- Горитов, А.Н. Построение плана траектории промышленного робота в условиях неполной информации о внешней среде/А.Н. Горитов//Мехатроника, автоматизация, управление: Прил. -2010. -№ 9. -С. 25-29.
- Попов, А.В. О способах сил и моментов при взаимодействии манипулятора с окружающей средой/А.В. Попов//Научно-технические ведомости СПбГТУ: Естеств. и техн. науки. -2006. -Т. 1, № 5. -С. 169-172.
- Рубцов, И.В. Аналитический синтез законов автоматического наведения и стабилизации оружия мобильного робототехнического комплекса специального назначения/И.В. Рубцов, П.Н. Саламаха//Мехатроника, автоматизация, управление: Прил. -2006. -№ 10. -С. 40-48.
- Барбашин, Е.А. Функции Ляпунова/Е.А. Барбашин. -М.: Наука, 1970.
- Борцов, Ю.А. Электромеханические системы с адаптивным и модальным управлением/Ю.А. Борцов, Н.Д. Поляхов, В.В. Путов. -Л.: Энергоатомиздат, Ленинградское отд-ие, 1984.
- Коренев, Г.В. Целенаправленная механика управляемых манипуляторов/Г.В. Коренев. -М.: Наука, 1979.
