Общая структурная расчетная схема системы дорога - шина - автомобиль - оператор

Автор: Шленкин К.В., Шленкин А.К.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 6 (24), 2017 года.
Бесплатный доступ
Статья посвящена изучению устойчивости и управляемости сложной машины, требующего подробное математическое описание его как объекта регулирования в системе дорога - шина - автомобиль - оператор. Рассмотрена общая структурная схема данной системы. Выделены группы переменных величин и соответствующие им типы взаимодействия между звеньями системы. Выявлено, что необходимо разработать пространственную модель автомобиля и задать в пространстве положение всех масс относительно дороги и получить уравнения движения системы.
Устойчивость, управляемость, механические колебания, звенья, курсовое движение, микропрофиль, возмущающее воздействие
Короткий адрес: https://sciup.org/140272023
IDR: 140272023
General structural design scheme of the system road - tyre - vehicle - operator
The article is devoted to the study of stability and controllability of complex machines requiring a detailed mathematical description of him as an object of regulation in the system road - tyre - vehicle - operator. Discusses the General structural scheme of the system. Selected groups of variables and the corresponding types of interaction between parts of the system. It is revealed that it is necessary to develop a spatial model of the car and set in space the position of all the masses relative to the road surface and to obtain the equations of motion of the system.
Текст научной статьи Общая структурная расчетная схема системы дорога - шина - автомобиль - оператор
Одним из важнейших разделов теории автомобиля является теория устойчивости и управляемости его движения, базирующаяся на анализе курсового движения.
Для исследования устойчивости и управляемости сложной машины требуется подробное математическое описание его как объекта регулирования в системе дорога – шина – автомобиль - оператор. В этой системе объединены в едином процессе как механические колебания отдельных масс (рама, кабина и т. д.), так и другие физические процессы, сопровождающие работу различных систем и влияющие на характеристики его движения (взаимодействие машины и оператора при управляемом движении, работа систем управления и взаимодействие его с внешней средой и поверхностью дороги).
Для системного исследования наиболее подходящей является методика, в основу которой положены представления теории автоматического управления, при которой исследуемая система «автомобиль» представляется совокупностью взаимодействующих динамических звеньев. Отдельные звенья этой системы не являются обязательно какими-либо изолированными и материальными ее частями. Это связано, в частности, с тем, что одна и та же материальная часть общей системы выполняет различные функции и характеризуется соответственно различными группами переменных величин. Например, колесо является элементом расчетной схемы вертикальных колебаний и одновременно элементом расчетной схемы рулевого управления, а также элементом расчетной схемы трансмиссии [1].
К внешним воздействиям на машину относятся дорожные неровности, воздействие воздушной среды, внешние, активные силы, а также заданная в плане форма проезжей части и проектные наклоны дороги.
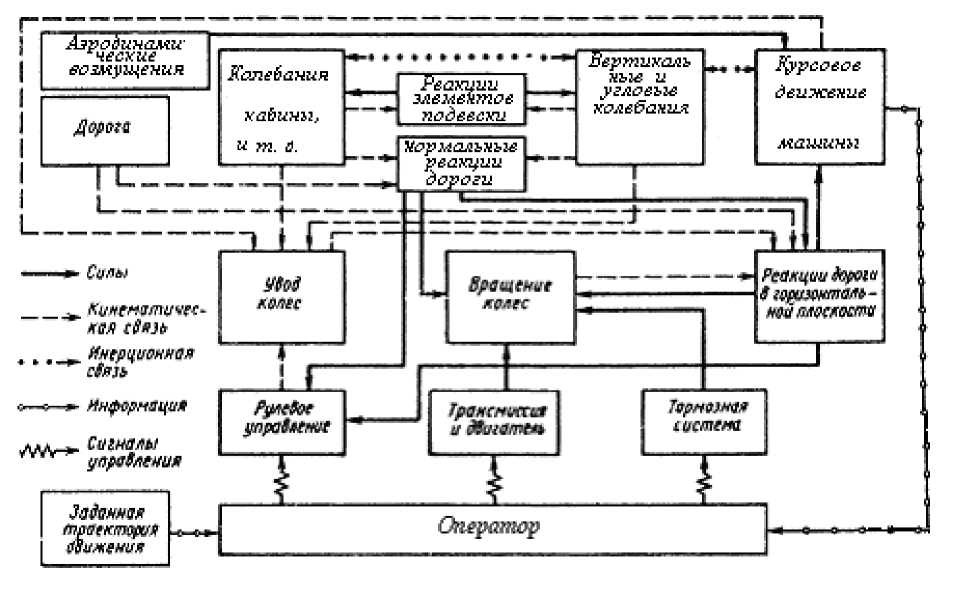
Совокупность выделенных динамических звеньев составляет структурную схему системы дорога - шина - автомобиль - оператор, которая показана на рисунке 1. Каждое звено этой системы совершает определенное преобразование величин и, следовательно, характеризуется входными и выходными параметрами, а также связывающими их уравнениями. Эти величины в соответствии с их физической природой разделены на группы, характеризующие тип взаимодействия между звеньями системы. Выделены следующие группы переменных величин и соответствующие им типы взаимодействия между звеньями системы [2,3]:
Азройинами" чеекие возмугценин
Дорого
----- Силы
Кинемотунес
<М t$»3b
Инерционная $взь
*—»—>- Информация
^_„ Салмли управления
Оператор
Реакции элементов подвески
Нормальные реакции дороги машина
Вертикаль ныв и ргловыв колебания
3—1__ курсовое движение
Колебания кабина, и т. 6.
Вращение колес
Реакции iopoiu 8 горизонталям плоскости
Мов колес
Саванная траектория движения
Тракскиссу и ВВигатея»
PyeeSoe управление
Тормозная i acme на.
Рисунок 1 - Общая структурная схема системы «дорога - шина - автомобиль - оператор».
1) кинематическое (линейные и угловые перемещения); 2) силовое (силы, действующие между частями машины при их относительном перемещении, а также реакции дороги); 3) информационное (кинематические и силовые факторы, воспринимаемые оператором); 4) сигнальное (величины, которые задает оператор и которые определяют положение органов управления машиной); 5) инерционное (кинематические ограничения, наложенные на относительные перемещения различных масс машины конструкцией направляющих устройств).
В систему дорога - шина - автомобиль - оператор включен как звено обратной связи. Функции оператора как динамического звена сводятся в данной задаче к преобразованию поступающей к нему информации о действительном движении машины в определенное положение органов управления в звеньях «рулевое управление», «трансмиссия и двигатель» и «тормозная система». Это преобразование водитель производит, сообразуясь с заданной программой движения машины.
Звенья «увод колес» и «вращение колес» преобразуют входные кинематические параметры, характеризующие движение рамы, кабины и т.д., и колес, в выходные кинематические параметры, которые определяют реакции дороги, действующие в горизонтальной плоскости. В этих звеньях учитываются кинематические связи, накладываемые конструкцией направляющего аппарата моста на перемещение колес относительно корпуса [4,5].
При исследовании устойчивости и управляемости машины изучается движение машины в плоскости дороги, которое называется курсовым движением, распространяя этот термин, как на прямолинейное, так и на криволинейное движение.
Кинематика курсового движения машины определяется четырьмя функциями Vy(t), Vx(t), ®z(t), p(S) с учетом формы дороги ширины проезжей части и организации движения транспортного потока.
В общем случае движение машины происходит по неровной дороге и криволинейной траектории, повторяющей в общих чертах форму дороги в плане. Поэтому для исследования курсового движения требуется более полная расчетная схема машины. Расчетная схема машины должна включать все колебательные системы и учитывать их взаимодействие. Для этого необходимо разработать пространственную модель автомобиля и задать в пространстве положение всех масс относительно дороги, выбрать плоскость, относительно которой необходимо отсчитывать ординаты микропрофиля и получить уравнения движения системы [6].
Возмущающее воздействие от дорожной поверхности представим ординатами микропрофиля под колесами дл , дп и углами поперечного наклона 'площадок контакта в л , в п (рисунок 2).
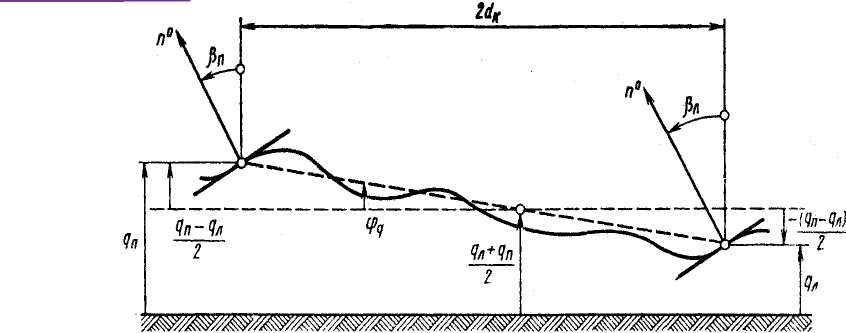
Рисунок 2 - Возмущения от дорожной поверхности: no - нормаль к поверхности дороги.
Введем также обозначение:
Фя=( Ял - qn)/(2dK), где 2dк - колея автомобиля.
Таким образом, для выяснения закономерностей возмущенного управляемого движения необходимо рассмотрение не отдельных частных случаев, а всей замкнутой системы дорога - шина - автомобиль - оператор.
Список литературы Общая структурная расчетная схема системы дорога - шина - автомобиль - оператор
- Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. М, Мир, 1971. - 408с.
- Курдюмов В.И., Павлушин А.А., Шленкин К.В., Шаронов И.А. Повышение эффективности очистки топлива. Сборник статей Всероссийской научно-практической конференции «Эксплуатация автотракторной техники: опыт, проблемы, инновации, перспективы» / Пенза: РИО ПГСХА, 2013. - С. 59-63.
- Лезин П.П. Основы надежности сельскохозяйственной техники. - Саранск: Изд-во Мордов.ун-та, 1997. - 223с.
- Шленкин К.В. Вопросы надежности техники при дилерской системе технического сервиса в АПК. Сборник научных трудов. Организация системы технического сервиса машин в АПК. Ульяновск. ГСХА. - 1997. -С.71..74.
- Шленкин К.В. Теоретические основы определения ресурса основных звеньев комбайна «ДОН-1500» методом слабейшего звена. Материалы Всероссийской научно-технической конференции. Повышение эффективности функционирования механических и энергетических систем: Сб. науч. тр. МГУ им. Н.П. Огарева; Редкол.: П.В. Сенин, и др. - Изд-во Мордов. ун-та, 2009. - С.97…99.
- Шленкин К.В., Павлушин А.А. Особенности системы технического обслуживания и ремонта зерноуборочных комбайнов в современных условиях. Материалы V Международной научно-практической конференции «Аграрная наука и образование на современном этапе развития: опыт, проблемы и пути решения» / Ульяновск; ГСХА им. П.А. Столыпина, 2013, т. II. - С. 278-282.
