Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс

Бесплатный доступ
Целью исследования является оценка принципиальной достижимости времени восстановления связи в сети не более 3 мс, основанной на протоколе резервирования Media Redundancy Protocol (MRP). Такое время восстановления необходимо для корректной работы протоколов процессной шины IEC 61850, включая Generic Object-Oriented Substation Event (GOOSE) и Sampled Values (SV). Методология основана на аналитической формуле времени сходимости MRP, приведенной в стандарте IEC 62439-2. Выполняется параметрический анализ влияния числа узлов в кольце, настроек протокола и характеристик оборудования на достигаемое время восстановления. На основе анализа обоснованы новые допустимые границы параметров MRP, обеспечивающие достижение порога в 3 мс. В ходе экспериментов на реальном оборудовании отражено влияние дополнительных задержек от программной составляющей используемого оборудования.
Цифровая подстанция, IEC 61850, GOOSE, Sampled Values (SV), Media Redundancy Protocol (MRP), сетевое резервирование, время восстановления
Короткий адрес: https://sciup.org/148333220
IDR: 148333220 | УДК: 004.7 | DOI: 10.18137/RNU.V9187.26.01.P.31
Assessment of the limits of applicability of the Media Redundancy Protocol for the IEC 61850 processor bus with a time limit of ≤ 3 ms
The purpose of this study is to assess the fundamental feasibility of achieving a network recovery time of no more than 3 ms in a network based on the Media Redundancy Protocol (MRP). Such a recovery time is required for the correct operation of IEC 61850 process bus protocols, including Generic Object-Oriented Substation Event (GOOSE) and Sampled Values (SV). The methodology is based on the analytical MRP convergence time formula specified in IEC 62439-2. A parametric analysis of the influence of the number of nodes in the ring, protocol configuration parameters, and hardware characteristics on the achievable recovery time is performed. Based on the analysis, new permissible limits of MRP parameters are substantiated to ensure compliance with the 3 ms threshold. The experiments on real hardware reflect the impact of additional delays caused by the software component of the equipment used.
Текст научной статьи Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс
Современные цифровые подстанции, построенные по стандарту IEC 61850, предъявляют жёсткие требования к надёжности сетевой инфраструктуры и времени восстановления связи при отказах. Технологические сообщения процессной шины – GOOSE и Sampled Values (SV) – требуют детерминированной доставки с задержками и временем восстановления не более нескольких миллисекунд, поскольку нарушение их передачи непосредственно влияет на корректность работы релейной защиты и устойчивость энергосистемы.
Для обеспечения отказоустойчивости широко применяются протоколы сетевого резервирования с нулевым временем восстановления. Однако в промышленной автоматизации, включая энергетику, по-прежнему используется и протокол Media Redundancy Protocol (MRP), имеющий не нулевое время перестройки кольца, обычно составляющее от нескольких до десятков миллисекунд. В стандартной конфигурации MRP не гарантирует достижение порога 3 мс, необходимого для передачи трафика GOOSE и SV, что ограничивает его применение на процессной шине цифровых подстанций.
Актуальность исследования заключается в необходимости количественной оценки пределов применимости MRP в IEC 61850, а именно: может ли протокол обеспечить требуемое время восстановления связи при оптимальном подборе параметров и допустимых размерах кольца, учитывая как нормативные ограничения, так и вероятность потерь служебных пакетов. Нужно отметить, что протокол MRP уже может применяться в IEC 61850 для такого протокола, как MMS, поэтому задача унификации и использования единого протокола резервирования имеет большую актуальность1.
Цель работы – исследовать возможности протокола MRP по обеспечению времени восстановления порядка 3 мс для трафика GOOSE и SV в сетях цифровых подстанций стандарта IEC 61850. Для достижения цели решаются следующие задачи:
Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс
-
• проанализировать нормативные требования IEC 61850 к времени доставки и восстановления сообщений;
-
• охарактеризовать параметры MRP, влияющие на время сходимости, и представить их в инженерно ориентированном виде;
-
• оценить вероятность потери управляющих пакетов MRP при различных значениях параметров протокола и обосновать допустимость снижения параметров стандарта IEC 62439-2;
-
• на основе формулы времени восстановления из IEC 62439-2 вывести аналитическое неравенство, связывающее параметры MRP, число узлов и требуемое время восстановления;
-
• определить диапазоны параметров и максимальные размеры кольцевой топологии, при которых MRP способен удовлетворить ограничение Trec ≤ 3 мс для трафика GOOSE и SV;
-
• провести эксперимент на реальном оборудовании, сравнить результат работы аналитической формулы с результатами эксперимента.
Научная новизна исследования состоит в разработке метода оценки применимости MRP для сетей с определенными требованиями к времени восстановления, а также в количественной оценке вероятности потери служебных пакетов при сниженных значениях параметров протокола. Также показано, что аналитическая формула времени восстановления MRP, приведённая в стандарте IEC 62439-2, фактически определяет нижнюю теоретическую границу времени восстановления сети, тогда как в реальных устройствах существенное влияние оказывают дополнительные задержки программной реализации протокола.
Практическая значимость заключается в формировании инженерных рекомендаций по настройке параметров MRP и выбору предельных размеров кольцевых сетей, при которых протокол может быть безопасно использован на станционном уровне цифровой подстанции с соблюдением требований по надежности и быстродействию.
В IEC 61850, а именно в протоколах GOOSE и SV, предъявляются жесткие требования к времени доставки/отклика, которое в ряде режимов и классов сообщений должно составлять порядка 3 мс. В случае аварийной ситуации передача таких сообщений может прерываться до восстановления связности сети. Поэтому в данной работе значение Ttarget = 3 мс принимается как максимальная длительность перерыва доставки (времени недоступности сервиса) при одиночном отказе. Если доставка прерывается на более длительное время, то это нарушит работу GOOSE/SV [1; 2].
В практике цифровых подстанций широко применяются протоколы абсолютного резервирования, такие как Parallel Redundancy Protocol (PRP) и High-availability Seamless Redundancy (HSR). Эти технологии обеспечивают практически мгновенное переключение и околонулевое время восстановления в передаче трафика при аварии. Это позволяет удовлетворять жестким требованиям к времени восстановления для GOOSE и SV2.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление». 2026. № 1
Media Redundancy Protocol (MRP), определенный в стандарте IEC 62439-2, обеспечивает автоматическое восстановление передачи трафика при разрыве кольца, однако его предельное время восстановления в ряде профилей типично составляет 10 мс. Реализация PRP и HSR, как правило, требует более сложной сетевой топологии, специализированного оборудования и, как следствие, высокой стоимости при создании и поддержке такой сети. В сравнении с ними MRP является более экономичным и простым решением: топология кольца, недорогие коммутационные устройства и простота на-стройки3.
Однако ограничения по времени восстановления в реализации MRP, описанные в стандарте IEC 62439-2, не позволяют обеспечить выполнения требования времени сходимости 3 мс4.
Характеризация параметров MRP и их влияние на время восстановления сети
Процесс восстановления связности в кольце MRP при возникновении разрыва происходит в несколько этапов.
-
1. Детектирование разрыва кольца. Менеджер кольца периодически отправляет тестовые пакеты MRP testT . Если в течение MRP testMAX интервалов подтверждение не получено, фиксируется нарушение целостности кольца. Данный этап формирует первое слагаемое формулы (1).
-
2. Передача служебных сообщений по кольцу. После обнаружения разрыва управляющий пакет распространяется по всем узлам кольца. На каждом узле возникает задержка обработки и коммутации пакета, определяемая параметрами Tswitch , Tbit , Tqueue и Tline . Суммарная задержка зависит от числа устройств N и формирует второе слагаемое формулы (1).
-
3. Обновление таблиц коммутации. После изменения топологии устройства должны обновить MAC-таблицы, что требует времени T FDB. Данный этап соответствует третьему слагаемому формулы (1).
-
4. Рассылка уведомлений о смене топологии. Для завершения процедуры восстановления узлы передают уведомления о смене топологии с интервалом MRP chgT . Общее число таких сообщений определяется параметром MRP chgMAX . Этот процесс формирует четвертое слагаемое формулы (1).
T rec = MRPtestT × MRPtestMAX + 2 N ( Tswitch + Tqueue + Tbit + Tline ) + TFDP + MRPchgT × MRPchgMAX . (1) Здесь Trec – время восстановления сети при отказе. Во всех слагаемых формулы (1) время выражено в миллисекундах. Все параметры формулы характеризуются в Таблице 1.
Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс
Таблица 1
Параметры формулы для вычисления Trec и их характеризация
|
Параметр |
Название |
Описание и диапазон значений |
Чем регулируется |
|
MRP testT |
Интервал тестовых пакетов |
Период между пакетами контроля целостности кольца, типично 1…50 мс (по умолчанию 20 мс)5 |
Задается профилем стандарта |
|
MRP testMAX |
Макс. число пропусков тестовых пакетов |
Количество подряд потерянных тестовых пакетов до фиксации обрыва (3 пакета по умолчанию)6 |
Задается профилем стандарта |
|
N |
Количество узлов кольца |
Общее число устройств в кольце не более 507 |
Определяется топологией сети. Ограничивается стандартом |
|
T switch |
Задержка коммутации |
Задержка прохождения пакета через коммутатор (0,01 мс)8 |
Определяется оборудованием |
|
T queue |
Очередь передачи |
Время задержки при переполнении очередей; для MRP должно быть ≈ 0 мкс9 |
Определяется приоритетом пакетов |
|
T bit |
Передача одного бита |
Время передачи одного MRP пакета при 100 Мбит/с (≈5,12 мкс)10 |
Определяется скоростью линии |
|
T line |
Задержка распространения |
Время распространения сигнала в медном кабеле (≈0,5 мкс на 100 м)11 |
Определяется длиной кабеля |
|
T FDB |
Обновление MAC-таблицы |
Время обновления таблицы коммутации после смены топологии (0,5 мс)12 |
Определяется аппаратной реализацией устройства |
|
MRP chgT |
Задержка уведомления о смене топологии |
Минимальное время ожидания после смены топологии (0,5…20 мс)13 |
Задается профилем стандарта |
|
MRP chgMAX |
Количество уведомлений о смене топологии |
Число уведомлений о смене топологии до завершения восстановления (3 пакета по умолчанию)14 |
Задается профилем стандарта |
Источник: здесь и далее таблицы составлены автором.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление». 2026. № 1
Часть параметров задается стандартом MRP, часть – топологией сети и характеристиками оборудования. В данной статье особый интерес представляют именно те параметры, которые задаются профилем стандарта, а не определяются строго физикой процессов.
Следует отметить, что выражение (1) описывает время восстановления, исходя из параметров протокола и аппаратных характеристик оборудования (задержки коммутации, передачи и распространения сигнала). При этом формула не учитывает дополнительные задержки, возникающие в программной реализации протокола в сетевых устройствах, такие как планирование задач операционной системы, обработка событий и джиттер программных таймеров. В реальных устройствах данные факторы могут вносить дополнительную задержку, особенно заметную при малых значениях целевого времени восстановления.
Определение значений параметров метода, обеспечивающего требуемое время восстановления кольца в MRP
Для оценки минимально возможного времени Trec необходимо определить минимально допустимые значения параметров, задающихся профилем стандарта MRP. На основе выводов проведенной выше характеризации в статье рассматривается минимизация следующих параметров: MRP chgMAX , MRP testMAX , MRP chgT , MRP testT .
MRP chgT и MRP testT – это интервалы отправки пакетов. В стандарте IEC 62439-2 минимально допустимые интервалы отправки пакетов 0,5 мс, поэтому вполне адекватно ограничить снизу эти параметры до 0,5 мс. Использование меньших интервалов требует дополнительных исследований15.
Параметры MRP chgMAX и MRP testMAX определяют, соответственно, число уведомлений о смене топологии и число последовательных пропущенных тестовых пакетов, после которых фиксируется разрыв. Уменьшение этих параметров уменьшает вклад соответствующих слагаемых в выражение для T ec , однако повышает риск ложного срабатывания при потере служебных пакетов. Для анализа этого риска рассмотрим вероятность потери пакетов при их передаче.
Вероятность потери управляющих пакетов в MRP
Обычно потери пакетов в сети связаны с переполнением буферов сетевых устройств. Протокол MRP подразумевает приоритизацию управляющего трафика, поэтому для него рассматриваются только ошибки во время передачи пакетов по линии. Остальные ошибки передачи трафика не должны касаться пакетов MRP из-за их высокой приоритизации в сети.
В литературе используется понятие BER (bit error rate) – вероятность искажения бита при передаче. В нормативных документах IEEE он принимается за 10–12 [3].
Предположим независимые битовые ошибки при передаче данных по линии связи. Тогда для пакета длиной L бит вероятность того, что в нём возникнет хотя бы одна битовая ошибка (и, следовательно, пакет будет отброшен),
Pferr = 1 – (1 – BER ) L ≈ BER ∙ L .
Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс
Значение верно, поскольку BER = 10–12, а L для управляющих MRP пакетов имеет равный 512 бит16. Если пакет проходит путь через N независимых линий, то вероятность его потери
Pfpath ( N ) = 1 – (1 – Pferr ) N = 1 – (1 – BER ∙ L ) N ≈ N ∙ BER ∙ L.
В статье [4] исследовалось влияние дубликатов на вероятность потерь пакетов. Если одно и то же сообщение передается несколько раз и считается успешно доставленным при получении хотя бы одной копии, то вероятность логической потери сообщения определяется как вероятность потери всех дублей:
Ploss(m) = (Ppath(N))m, где m – число дубликатов.
В протоколе MRP дублирование служебных пакетов происходит в двух формах. Во-первых, каждый служебный пакет отправляется одновременно в двух противоположных направлениях кольца MRP. Это обеспечивает две независимые копии сообщения. Во-вторых, стандарт задает параметры MRP chgMAX и MRP testMAX , определяющие число повторов служебного пакета17.
Таким образом, логическое сообщение передается 2 k раз, где k – количество дублей согласно параметрам стандарта, а множитель 2 отражает два направления в кольце. Отсюда итоговая вероятность логической потери служебного сообщения
Pmrploss ( k ) = ( Pfpath ( N ))2 k .
Для инженерных расчётов важно оценивать не саму вероятность единичной ошибки, а среднее время до возникновения такой ошибки. Среднее время до аварии (Mean Time Between Failures) в секундах
T =
-
2 k f • ( Ppath ( N ) )2 k
Проведем оценку среднего времени до потери служебного сообщения на основании формулы (2). Стандарт IEC-62439-2 ограничивает размер кольца значением N = 50. Частота f = 2000 для интервала отправки пакетов 0,5 мс, выбранного ранее.
Выполним расчет для трех характерных значений, соответствующих практической настройке MRP, и покажем в Таблице 2.
Таблица 2
Зависимость среднего времени до потери MRP пакета от числа копий
|
k |
Число копий (2 k ) |
T , сек. |
T , лет |
|
1 |
2 |
7,6 · 1011 |
2,4 · 104 |
|
2 |
4 |
1,2 · 1027 |
3,7 · 1019 |
|
3 |
6 |
1,8 · 1042 |
5,6 · 1034 |
Даже минимальное значение k = 1 обеспечивает среднее время до потери служебного сообщения, значительно превышающее срок эксплуатации оборудования. При k = 2 и k = 3 вероятность аварии практически исчезает.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление». 2026. № 1
Таким образом, значения параметров MRP chgT и MRP testT ограничены временем 0,5 мс. А для MRP chgMAX и MRP testMAX обоснована допустимость снижения их до 1…2.
Пример расчета времени восстановления по формуле (1)
В качестве иллюстрации расчета времени восстановления по формуле (1) рассмотрим малое кольцо на N = 5 узлов и выберем минимальные или близкие к ним значения параметров, допускаемые стандартом IEC 62439-2 и типичные для современного оборудования: MRP testT = 1 мс, MRP testMAX = 3, Tswitch = 0,01 мс, Tqueue = 0, Tbit = 0,005 мс, Tline = 0,0005 мс, T FDB = 0,5 мс, MRP chgT = 0,5 мс, MRP chgMAX = 318.
Trec = 1 ∙ 3 + 2 ∙ 5 ∙ (0,01 + 0 + 0,005 + 0,0005) + 0,5 + 0,5 ∙ 3 = = 3+ 10 ∙ 0,0155 + 0,5 + 1,5 = 3 + 0,155 + 0,5 + 1,5 = 5,155 мс.
Видим, что даже при выборе минимально допустимых значений параметров конфигурации MRP и малом числе узлов кольца время восстановления Trec оказывается порядка 5 мс, что превышает целевое ограничение 3 мс для трафика GOOSE и SV в соответствии с IEC 61850. Это означает, что обеспечить выполнение требований процессной шины исключительно за счёт значений параметров MRP, допускаемых стандартом, проблематично даже на простых топологиях, как, например, кольцо из 5 устройств.
В дальнейшем в работе рассматривается возможность уменьшения параметров MRP testMAX и MRP chgMAX , а также интервалов отправки служебных пакетов до минимально допустимых значений стандарта IEC 62439-2. Это позволяет оценить предельные границы применимости протокола MRP и определить условия, при которых возможно достижение целевого времени восстановления Ttarget ≤ 3 мс.
Вывод неравенства, оценивающего максимальное число устройств в кольце MRP в зависимости от требуемого времени восстановления и параметров протокола
Вычисляемое время Trec должно быть меньше требуемого времени восстановления Ttarget . Важным параметром, чье значение напрямую влияет на возможность использования протокола, является число устройств в кольце. Остальные обеспечивают выполнение требований этого протокола. Поэтому в первую очередь необходимо смотреть на N – число устройств. Если оно меньше двух, то протокол неприменим, поскольку кольцо менее чем из двух устройств теряет смысл. Все параметры должны быть выбраны так, чтобы выполнялось неравенство Trec ≤ Ttarget . Подставим выражение из (1) в это неравенство:
MRPtestT ∙ MRPtestMAX + 2 N ( Tswitch + Tqueue + Tbit + Tline ) + TFDB + MRPchgT ∙ MRPchgMAX ≤ Ttarget .
Вынесем члены, зависящие от N , в одну часть, а остальные параметры – в другую:
2 N ( Tswitch + Tqueue + Tbit + Tline ) ≤ Ttarget – ( MRPtestT ∙ MRPtestMAX + TFDB + MRPchgT ∙ MRPchgMAX ). Разделим обе части неравенства на 2( Tswitch + Tqueue + Tbit + Tline ):
T
N ≤ target
- (MRP, ,T • MRP, + TnH + MRP • MRP testT testMAX FDB chgT chgMAX
(T . + T + T + T )
switch queue bit line
.
Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс
Таким образом, получено неравенство (3), задающее верхнюю границу числа устройств N в кольце, при которой выполняется условие Trec ≤ Ttarget .
Границы применимости для параметров MRP, обеспечивающие достаточное время восстановления Trec для удовлетворения требований стандарта IEC 61850
Для нахождения границ применимости протокола MRP воспользуемся неравенством (3). Требуемое время восстановления кольца в рамках данной работы фиксируется как Ttarget = 3 мс. Параметр Tswitch = 0,01 мс, Tqueue = 0, Tbit = 0,005 мс, Tline = 0,0005 мс, T FDB = 0,5 мс. Параметры MRP chgMAX , MRP testMAX , MRP chgT , MRP testT можно настраивать. Для визуализации их влияния на неравенство написана программа на языке Python. Пример работы показан на Рисунке 1. Несколько множеств настраиваемых параметров и результат для них рассчитаны с помощью программы.
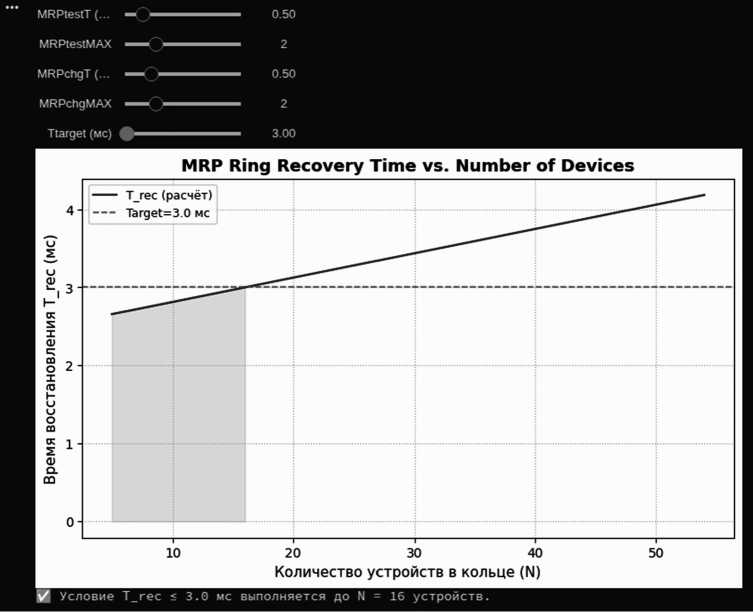
Рисунок 1. График зависимости времени восстановления Trec от числа узлов кольца N Источник: здесь и далее рисунки выполнены автором
Результаты показаны в Таблице 3. Минимальные возможные значения обеспечивают до N = 48 узлов. Это практически совпадает с ориентировочным пределом в 50 устройств, указанным в стандарте IEC 62439-2. Увеличение любого параметра приводит к линейному сокращению допустимого N . Следует отметить, что увеличение MRP chgMAX , MRP testMAX на единицу равносильно увеличению MRP chgT , MRP testT с 0,5 до 1 мс. Если увеличивать значения дальше, то N становится меньше единицы, как в строке 4 Таблицы 3. Это означает, что такой набор параметров неприменим для стандарта IEC 61850.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление». 2026. № 1
Таблица 3
Допустимое число узлов N в кольце MRP в зависимости от параметров
MRP chgMAX , MRP testMAX , MRP chgT , MRP testT
|
MRP chgT (мс) |
MRP chgMAX |
MRP testT (мс) |
MRP testMAX |
Макс. N |
|
0,5 |
1 |
0,5 |
1 |
48 |
|
0,5 |
1 |
1,0 |
1 |
32 |
|
0,5 |
2 |
0,5 |
1 |
32 |
|
1,0 |
2 |
0,5 |
1 |
< 1 |
|
0,5 |
2 |
0,5 |
2 |
16 |
Практические испытания
Для проверки корректности полученных аналитических оценок проведено экспериментальное исследование времени восстановления сети MRP.
Экспериментальный стенд состоял из трех промышленных Ethernet-коммутаторов «Корунд-4о-8Т» компании «Ангстрем-Телеком»19, соединенных в кольцевую топологию. Для каждого устройства в качестве портов MRP использовались порты 1 и 2. Разрыв кольца инициировался физическим отключением одного из соединений.
Измерение времени восстановления выполнялось с помощью утилиты convergence-analyzer20, которая фиксирует момент разрыва связи и момент восстановления передачи кадров.
В ходе эксперимента были исследованы два набора параметров протокола MRP:
-
• стандартный профиль 500, предусмотренный стандартом IEC 62439-2;
-
• модифицированный профиль, соответствующий параметрам из пятой строки Таблицы 3.
Стандартный профиль 500 настраивался штатными средствами конфигурации коммутатора через интерфейс командной строки операционной системы AngtelOS21. Модифицированный профиль не поддерживается стандартной конфигурацией оборудования, поэтому для его реализации была выполнена экспериментальная модификация программного сервиса, реализующего протокол MRP.
Экспериментальные измерения времени восстановления для кольца из трёх устройств при использовании стандартного профиля 500 показали, что значения Trec лежат в диапазоне 3,2…489 мс, а среднее экспериментальное значение составляет около 191 мс. Распределение времени восстановления показано на Рисунке 2. В то же время теоретическая оценка по формуле (1) дает
Trec = 50 ∙ 3 + 3 ∙ (0,01 + 0 + 0,005 + 0,0005) + 0,5 + 50 ∙ 3 = 300,5465 ≈ 300,55 мс.
Экспериментальные измерения времени восстановления для кольца из трёх устройств при параметрах MRP chgT = 0,5 мс, MRPc hgMAX = 2, MRP testT = 0,5 мс, MRP testMAX = 2 показали
Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс значения в диапазоне 3,2…21,2 мс при среднем значении около 9,7 мс. Распределение времени восстановления показано на Рисунке 3. Теоретическая оценка по формуле (1) даёт значение
Trec = 0,5 ∙ 2 + 3 ∙ (0,01 + 0 + 0,005 + 0,0005) + 0,5 + 0,5 ∙ 2 = 2,5465 ≈ 2,55 мс.
Полученное различие между аналитическими расчетами и экспериментом указывает на то, что в реальных устройствах существенное влияние имеют особенности программной реализации.
Следует отметить, что при использовании стандартного профиля 500 абсолютные значения времени восстановления составляют сотни миллисекунд. В этом случае дополнительные программные задержки, возникающие в реализации протокола на сетевых устройствах, оказывают относительно малое влияние на итоговое значение Trec. Даже задержки порядка нескольких миллисекунд не меняют общий порядок величины времени восстановления.
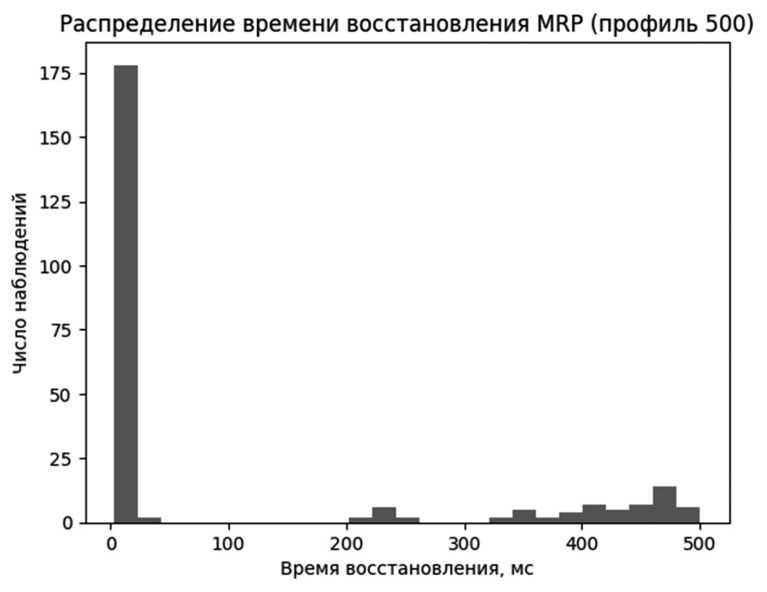
Рисунок 2. Распределение времени восстановления для профиля 500
Однако при исследовании режимов с целевым временем восстановления порядка нескольких миллисекунд влияние программных задержек становится существенно более заметным. В этом случае даже дополнительные задержки обработки порядка 1…5 мс, возникающие в программной реализации протокола, могут значительно увеличивать итоговое время восстановления и приводить к заметному расхождению между аналитической оценкой и экспериментальными измерениями.
Полученные результаты позволяют уточнить модель времени восстановления для реальных устройств. Фактическое время восстановления можно представить в виде
Trec_real = Trec + Tsw, где Trec – это значение, вычисленное по формуле (1); Tsw – это дополнительная программная задержка, обусловленная программной реализацией протокола в сетевом устройстве.
Вестник Российского нового университета
Серия «Сложные системы: модели, анализ и управление». 2026. № 1
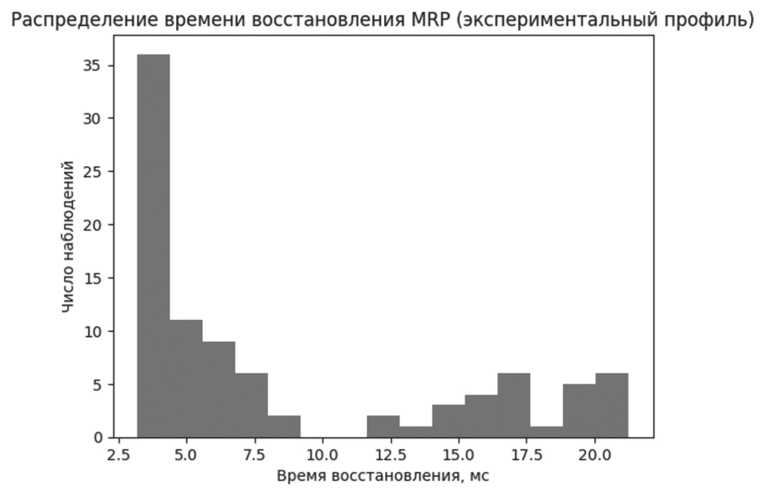
Рисунок 3 . Распределение времени восстановления для измененного профиля
В рассматриваемом эксперименте величина Tsw для используемых коммутаторов составляет несколько миллисекунд, что не оказывает существенного влияния при стандартных профилях MRP, но становится критичным при попытке достижения времени восстановления порядка 3 мс. Этот вопрос требует дополнительных исследований.
Обсуждение результатов
Полученное неравенство (3) и параметрический анализ позволяют быстро оценивать допустимый размер кольца N и чувствительность Trec к настройкам MRPchgMAX / MRPtestMAX / MRPchgT / MRPtestT и задержкам оборудования. Следует отметить ограничения принятых допущений. Минимальные интервалы MRPchgT / MRPtestT = 0,5 мс допустимы не на любом устройстве: реализуемость зависит от конкретного оборудования. Численные границы применимости MRP зависят от принятых оценок задержек оборудования ( Tswitch , TFDB , Tqueue и др.). Поэтому Таблицу 3 следует рассматривать как основу для сравнения сценариев, а не как универсальное значение для любых реализаций. Но в целом предложенная модель и неравенство (3) формируют удобный аналитический аппарат, который требует экспериментальной проверки на конкретных коммутаторах и уточнения для условий промышленной эксплуатации.
Для оценки реалистичности принятых в расчетах параметров целесообразно сопоставлять их с характеристиками промышленного сетевого оборудования, применяемого на цифровых подстанциях. В качестве типичных устройств, поддерживающих протокол MRP , можно привести промышленные Ethernet-коммутаторы Siemens SCALANCE X204/X300, Hirschmann RSP/RSPM, Moxa EDS-4000/EDS-G4000, а также серию «Корунд» от компании «Ангстрем-Телеком»22. Подобные коммутаторы широко использу-
Оценка границ применимости Media Redundancy Protocol для процессорной шины IEC 61850 с ограничением времени ≤ 3 мс ются в сетях промышленной автоматизации и энергетики и поддерживают механизмы резервирования, предусмотренные стандартом IEC 62439-223.
Согласно технической документации производителей промышленного сетевого оборудования задержка коммутации Ethernet-кадра в современных промышленных коммутаторах составляет единицы микросекунд. Например, для коммутаторов Siemens SCALANCE X-200 в спецификации указана задержка коммутации порядка 5 μs при использовании режима store-and-forward24. Это соответствует принятой в работе оценке из стандарта Tswitch ≈ 0,01.
Проведенные эксперименты позволяют предположить, что основное расхождение между аналитическими расчётами и экспериментальными измерениями связано с дополнительными задержками программной обработки в сетевых устройствах. Формула (1), приведённая в стандарте IEC 62439-2, фактически описывает нижнюю границу достижимого времени восстановления, поскольку учитывает только аппаратные задержки передачи и обработки кадров. В используемых для эксперимента реальных устройствах реализация протокола MRP выполняется программными средствами, что приводит к дополнительным задержкам обработки событий. При больших значениях Trec (например, для профиля 500) влияние этих задержек незначительно, однако при попытке достижения времени восстановления порядка нескольких миллисекунд их вклад становится доминирующим.
Заключение
В работе выполнена аналитическая оценка принципиальной достижимости целевого времени восстановления связи Ttarget = 3 мс для трафика GOOSE и SV в сетях IEC 61850 при использовании протокола MRP . На основе формулы времени восстановления Trec из IEC 62439-2 проведена характеризация параметров протокола и оборудования, влияющих на время сходимости кольца. Показано, что даже при малом размере кольца N = 5 и выборе минимальных (или близких к минимальным) значений параметров, допускаемых стандартом, Trec остается порядка 5 мс, то есть превышает порог 3 мс.
