Оценка стабильности двигательного паттерна гребцов-каноистов на основе амплитудно-временного анализа электромиографических профилей мышц

Автор: Хэ Ч., Су Ш., Давыдова Н.С., Лукашевич Д.А., Васюк В.Е., Давыдов М.В.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 3 (97) т.26, 2022 года.
Бесплатный доступ
Задача обучения технике гребли на каноэ состоит в выработке эффективных двигательных паттернов, обеспечивающих стабильность и надежность результата вне зависимости от условий реализации движения. Представлен алгоритм автоматизированной оценки стабильности двигательного паттерна гребцов-каноистов на основе амплитудно-временного анализа электромиографических профилей мышц. Предложены новые диагностические показатели физической и технической подготовленности гребцов-каноистов: коэффициент стабильности мышечной активности и коэффициент стабильности временной структуры гребка. Проведены исследования стабильности двигательного паттерна квалифицированных спортсменов-каноистов ( n = 16) с использованием гребного тренажера при различных условиях движений: преодоление дистанции 250 м в режиме максимальной мощности движений (тест 1) и преодоление дистанции 250 м в режиме максимального темпа движений (тест 2). Установлено, что для квалифицированных представителей гребли на каноэ характерна высокая стабильность мышечной активности (в среднем более 86 %) и временной структуры гребков (более 93 %) вне зависимости от мощности и темпа движений. Кроме того, установлена тенденция повышения стабильности мышечной активности гребцов с увеличением тренировочного опыта (коэффициент корреляции Пирсона r = 0,70 для режима максимальной мощности движений и r = 0,73 для режима максимального темпа движений).
Гребля на каноэ, двигательный паттерн, многоканальная электромиография, цифровая обработка сигнала
Короткий адрес: https://sciup.org/146282601
IDR: 146282601 | УДК: 51-76, | DOI: 10.15593/RZhBiomeh/2022.3.05
Assessment of the stability of the movement pattern of canoe paddlers based on amplitude-time analysis of muscle electromyography profiles
The aim of teaching the canoeing technique is to develop effective motor patterns ensuring the stability and reliability of the results regardless of the conditions for movement realization. The paper presents an algorithm for automated assessment of the stability of the motor pattern of canoe paddlers based on the amplitude-time analysis of muscle electromyography profiles. New diagnostic indicators of physical and technical readiness of canoeing paddlers have been proposed: the coefficient of stability of the muscle activity and the coefficient of stability of the temporal structure of the stroke. The studies of the stability of the motor pattern of first class canoe paddlers ( n = 16) have been carried out under different conditions of movements using the paddling ergometer: covering a distance of 250 m with maximum power of movements (test 1) and covering a distance of 250 m with maximum pace of movements (test 2). It has been found that first class canoe paddlers are characterized by a high stability of the muscular activity (on average more than 86 %) and high stability of the temporal structure of strokes (more than 93 %), regardless of the power and pace of movements. Moreover, the research has revealed a tendency for increase in the stability of muscular activity of the paddlers with increasing training experience ( r = 0,70 for the mode of maximum power of movements, r = 0,73 for the mode of maximum pace of movements).
Текст научной статьи Оценка стабильности двигательного паттерна гребцов-каноистов на основе амплитудно-временного анализа электромиографических профилей мышц
Двигательные навыки являются высшей ступенью владения двигательным действием и характеризуются автоматизированным характером управления, высокой быстротой действия, стабильностью результата, чрезвычайной прочностью и надежностью [31 ; 47]. Формирование двигательных навыков в спорте не менее важно, чем развитие силы, скорости, выносливости и снижение времени реакции. Овладение двигательным

Эта статья доступна в соответствии с условиями лицензии Creative Commons Attribution-NonCommercial 4.0 International
License (CC BY-NC 4.0)
This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License (CC BY-NC 4.0)
навыком означает более высокую эффективность движений, экономичность усилий и улучшение спортивного результата [39].
Гребля на каноэ является одним из наиболее популярных видов гребного спорта. Анализ последних исследований показывает, что в данной области ведутся разработки новых методологических и педагогических подходов к развитию двигательных навыков гребцов-каноистов [9; 10; 13; 34; 37].
Стабильность двигательного навыка достигается многократным воспроизведением движения в самых различных условиях с изменениями деталей кинематической, динамической и ритмической характеристик движения [28]. Это может происходить при усложнении внешних условий (условия опоры, ограничение пространства), изменениях в физическом и психическом состояниях (при утомлении, отвлечении внимания, волнении) или при возрастающих физических нагрузках [7; 35; 48]. Для гребцов наиболее значимыми факторами, влияющими на эффективность техники гребли, являются темп и мощность движения [1; 30; 32]. Следует полагать, что те же факторы будут значимы и для гребцов-каноистов.
Двигательный навык характеризуется совокупностью двигательных паттернов (стереотипов), которые представляют собой устойчивый комплекс угловых и линейных перемещений звеньев тела во времени за счет последовательной активации набора мышечных групп [26; 42]. Вариабельность биомеханических и электрофизиологических параметров двигательного навыка при различных внешних или внутренних условиях реализации движения является показателем несовершенства двигательного акта, поскольку это свидетельствует о повышении затрат мышечной энергии на коррекцию и поддержание двигательных паттернов [2].
Задача оценки стабильности двигательного паттерна в различных условиях является актуальной для многих видов спорта [21]. В области гребли на каноэ также есть несколько научных работ по данной теме, однако они основываются исключительно на кинематическом анализе гребного хода [27; 40; 50]. В представленной работе для решения данной задачи предлагается амплитудно-временной анализ многоканальных электромиограмм при выполнении гребковых движений. Кроме того, для расширения диагностического потенциала электромиографических сигналов используется совместный анализ с кинематическими параметрами движения.
Следует отметить, что электромиография успешно применяется в области гребного спорта для исследования межмышечной координации [25; 38; 46] и мышечной синергии [41; 43; 44]. Многоканальная электромиография позволяет оценить участие мышц в различных движениях, последовательность их включения и выключения, интегральный уровень возбуждения, соотношение активности мышц в разные периоды формирования движения [33].
Проведенный аналитический обзор научных работ показывает, что на сегодняшний день нет работ, посвященных оценке стабильности двигательного паттерна гребцов-каноистов с использованием многоканальной электромиографии. Таким образом, цель представленной работы является актуальной и посвящена разработке и апробации алгоритма оценки стабильности двигательного паттерна гребцов -каноистов на основе амплитудно-временного анализа электромиографических профилей мышц. Предполагается, что амплитудно -временной анализ электромиографических профилей мышц позволит выявить значимые диагностические показатели физической и технической подготовленности гребцов на каноэ.
Методология
Участники и порядок проведения исследований
В исследованиях принимали участие профессиональные гребцы-каноисты, имеющие многолетний опыт выступлений на чемпионатах Мира, чемпионатах Европы и Олимпийских играх. В исследовании приняли участие 16 спортсменов (женщины, возраст от 20 до 27 лет, 8 правшей, 8 левшей). Всем участникам предварительно объяснили суть исследования и показали тестовые упражнения. Участники были полностью здоровы и дали письменное согласие на участие в исследовании. Эксперименты проводились в соответствии с Хельсинкской декларацией и были одобрены экспертной комиссией Белорусского национального технического университета.
В работе применялась традиционная техника гребли на каноэ [24]. В этом случае гребок можно разделить на опорную фазу (проводка) и безопорную фазу (возврат) [12]. Во время проводки в начале гребка осуществляется захват лопастью весла воды, далее каноэ получает ускорение за счет опоры весла о воду, и затем следует выход лопасти из воды. Во время возврата гребец перемещает плечи, руки и весло вперед, готовясь к следующему гребку.
Исследование двигательного паттерна гребцов-каноистов осуществлялось в лабораторных условиях с использованием специализированных тренажерных устройств (гребных эргометров). В ходе исследования спортсмены выполняли два тестовых задания:
-
- тест 1: преодоление дистанции 250 м в режиме максимальной мощности движений. Спортсмену предлагалось тестовое задание с акцентированным выполнением опорной фазы гребка, характеризующееся максимальным или около максимальным силовым обеспечением для наибольшей длины проката за гребок. Темп гребли в рамках этого тестового задания умеренный, индивидуальный, исходя из режима интенсивности по пульсу (130-140 уд./мин);
-
- тест 2: преодоление дистанции 250 м в режиме максимального темпа движений. Спортсмену предлагалось тестовое задание с максимальным темпом. Этот режим позволяет смоделировать соревновательное прохождении дистанции. Величина темпа индивидуальна для каждого
согласно уровню его физической и технической подготовленности.
Тестовые задания подобраны таким образом, чтобы обеспечить возможность сравнения двигательных паттернов спортсменов, выявить и описать различия в активности мышц и кинематической структуре движений, а также оценить стабильность техники гребли.
В качестве исследуемых мышечных групп были выбраны: большая грудная мышца (Pectoralis major ), широчайшая мышца спины ( Latissimus dorsi ), прямая мышца живота ( Rectus abdominis ), двуглавая мышца плеча ( Biceps bra-chii ), трехглавая мышца плеча ( Triceps brachii ), прямая мышца бедра ( Rectus femoris ). Выбор мышц основан на их активном вовлечении в процесс гребли [29; 36; 45].
Для исследования работы мышц в процессе гребли использовалась многоканальная интерференционная электромиография. Данный метод является удобным и безболезненным инструментом, который позволяет регистрировать биоэлектрическую активность нескольких мышц одновременно. Это дает возможность определить наиболее активно вовлекаемые в движение мышечные группы и выявить характер распределения усилий между ними [33].
Для анализа пространственно-временных параметров гребли использовались располагаемые на исследуемых мышцах инерциальные MEMS -гироскопы, которые позволяют измерять угловую скорость звеньев тела в процессе движения [19].
Инструментарий и сбор данных
Для исследований использовался гребной тренажер Dansprint Ergometer ( Dansprint , Дания) с неподвижным основанием. Нагрузка задавалась посредством регулирования величины отверстий на маховике. В ходе тестирования спортсмены использовали древки весел с индивидуальными рукоятками.
Регистрация электромиографических сигналов мышц и сигналов гироскопа осуществлялась с помощью беспроводной системы Trigno Wireless System c Trigno Avanti Sensors ( Delsys Inc ., USA ). Каждый беспроводной датчик позволяет регистрировать один канал электромиографии (полоса пропускания 10–850 Гц, входной диапазон до 22 мВ, разрешение 16 бит), 3 канала гироскопа (три оси координат, частота дискретизации 741 Гц, разрешение 16 бит), передавать данные по Bluetooth на расстояние до 40 м [17].
Фиксация и расположение датчиков на исследуемых мышцах, их ориентация относительно двигательных волокон, качество подготовки поверхности кожи для регистрации поверхностной электромиографии проводились в соответствии с рекомендациями SENIAM [22].
Запись электромиографии и сигналов гироскопа осуществлялась с помощью программного обеспечения Delsys Acquisition Software ( Delsys Inc ., USA ). Дальнейший анализ данных проводился в программной среде для решения задач технических вычислений MATLAB ( MathWorks , USA ). Для этого было разработано авторское программное обеспечение, которое посредством инструмента Delsys
EMGworks COM interface сопрягается с системой Trigno Wireless System [3].
Анализ данных
На сегодняшний день наблюдается тенденция автоматизации вычислительных процессов анализа и интерпретации биомедицинских данных, за счет чего повышаются скорость, достоверность и качество результатов исследований. Программная реализация алгоритмов обработки биомедицинских данных позволяет проводить сравнительный анализ не единичных спортсменов, а целых спортивных команд. Кроме того, автоматизация вычислений существенно уменьшает вероятность ошибки при обработке больших массивов биомедицинских данных [23].
На рис. 1 представлен алгоритм автоматизированной оценки стабильности двигательного паттерна гребцов-каноистов на основе амплитудно-временного анализа элек-тромиографических профилей мышц. Согласно разработанному алгоритму процедура количественной оценки стабильности двигательного паттерна гребцов-каноистов происходит в следующей последовательности.
На начальном этапе осуществляется выбор целевых электромиографических сигналов и сигналов гироскопа. Данная задача решается индивидуально и зависит от типа и структурной сложности исследуемого движения. В случае гребли целесообразно исследование работы мышц рук, груди, спины и живота [45].
При выборе целевых сигналов гироскопа необходимо руководствоваться кинематической моделью человека, представляющей собой систему рычагов с различной степенью свободы, соединенных суставными организациями [20]. Такая модель описывает движение как результат угловых и линейных перемещений звеньев тела во времени [18]. Для выделения циклов гребли в работе были выбраны сигналы гироскопа с датчиков, расположенных на дельтовидной мышце ( Deltoideus ). При этом для спортсменов, выполняющих опорную фазу гребка слева, использовались сигналы гироскопа с дельтовидной мышцы левой руки. Для спортсменов, выполняющих опорную фазу гребка справа, использовались сигналы гироскопа с дельтовидной мышцы правой руки. Выбор сигналов гироскопа обусловлен следующими факторами. Во-первых, плечо тянущей руки спортсмена при выполнении опорной фазы гребка движется преимущественно в сагиттальной плоскости без явно выраженных ротационных движений и смещений в другие плоскости. Более того, плечевой сустав содержит в себе оси вращения плеча и, соответственно, всей руки в целом, что существенно снижает степень воздействия на сигнал гироскопа двигательных помех.
Благодаря этому измеряемый сигнал гироскопа с датчика, расположенного на дельтовидной мышце тянущей руки спортсмена, позволяет безошибочно определить опорную и безопорную фазы гребка. Во-вторых, авторами проведены исследования техники гребли на каноэ с использва-нием синхронизированной записи сигналов гироскопа и видеосъемки. В результате чего было установлено, что пол-
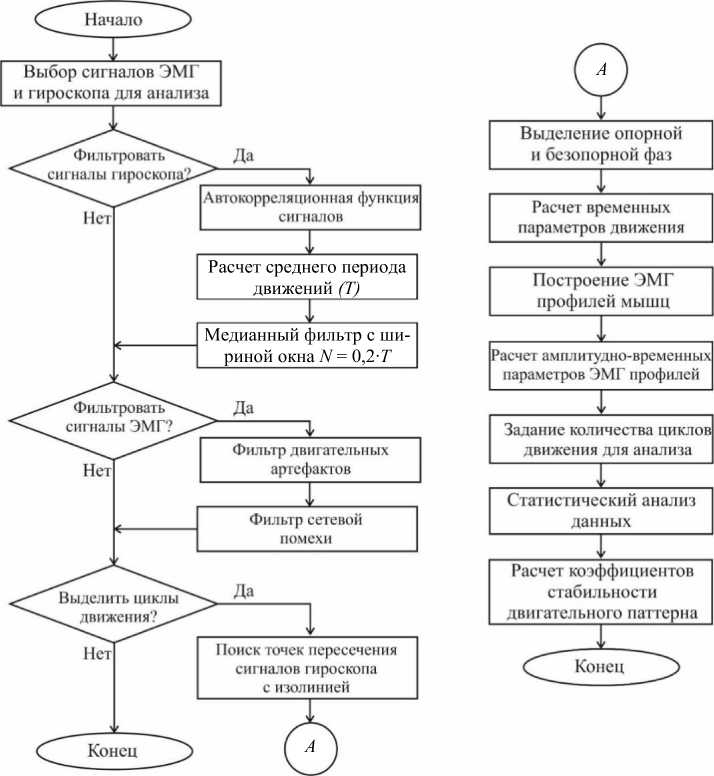
Рис. 1. Алгоритм оценки стабильности двигательного паттерна гребцов-каноистов. ЭМГ - электромиография
ожительные значения сигнала гироскопа с датчика, расположенного на дельтовидной мышце тянущей руки спортсмена, соответствуют опорной фазе гребка [4].
Сигналы инерционного гироскопа представляются в виде проекций вектора угловой скорости ( w , º/с) на связанные с объектом оси [49]. Фильтрация сигналов гироскопа осуществляется с помощью медианного фильтра с динамическим окном. Медианный фильтр осуществляет усреднение заданного числа точек из входного сигнала для вычисления каждой точки в выходном сигнале [6]. Ширина окна ( N) медианного фильтра выбирается динамически и зависит от периода движения ( T ). Усредненный период движения определяется как период автокорреляционной функции сигнала гироскопа. Автокорреляционная функция сигнала [6] рассчитывается по формуле:
1 N - 1
r xx (j) = ^X i = 0 x(i) ' x( i + j), (1) где x(i), i = 1, N - дискретный сигнал гироскопа, содержащий N элементов, j = 0, N - величина задержки.
Следующим этапом является фильтрация сигналов многоканальных электромиограмм с целью удаления двигательных артефактов и сетевой помехи из спектра полез- ного сигнала [16]. Для фильтрации двигательных артефактов используется фильтр высоких частот с частотой среза 10 Гц, для сетевой помехи - режекторный фильтр 50 Гц. При конструировании названных фильтров необходимо обеспечить минимизацию амплитудных и фазовых искажений в полосе пропускания и заданное подавление сигнала в полосе задерживания [8]. Применение фильтров необходимо ограничить случаями реального зашумления полезного сигнала, так как любой фильтр вносит дополнительные фазовые и/или амплитудные искажения в исходный сигнал.
Далее осуществляется выделение циклов движения. Критерием выделения циклов гребли является пересечение сигнала гироскопа с изолинией, что соответствует остановке звена тела человека в определенном положении.
Точка i cross является точкой пересечения двух сигналов x(i) и y(i), если выполняется условие:
x^z )—y(i ) = 0. (2) cross y cross .
На рис. 2 представлен пример определения циклов гребли на основании найденных точек пересечения сигнала гироскопа (с дельтовидной мышцы) с изолинией. Выделение опорной и безопорной фазы гребка осуществляется на основе полярности сигнала гироскопа. Положительные значения угловой скорости (w, º/s) соответствуют опорной фазе гребка, отрицательные – безопорной фазе. В опорной фазе гребка спортсмен взаимодействует с поверхностью воды и осуществляет ускорение каноэ. Безопорная фаза гребка соответствует проносу весла и завершает двигательный цикл [11]. На основании детектированной временной структуры гребли рассчитываются следующие временные параметры движения: длительность циклов гребли, а также длительность опорной и безопорной фазы каждого гребка.
На следующем этапе осуществляется наложение детектированной временной структуры гребли на электромио-графические сигналы и построение электромиографиче-ских профилей исследуемых мышц. Электромиографиче-ский профиль представляет собой устойчивый пространственно-временной паттерн биоэлектрической активности мышцы, отображающий последовательность и степень активации мышцы в процессе выполнения конкретного движения [5]. На рис. 3 показан пример электро-миографического профиля мышцы Latissimus Dorsi левой стороны.
Для количественной оценки усилий, развиваемых мышцами в процессе гребли, рассчитываются амплитудновременные параметры электромиографических профилей мышц. В представленной работе осуществляется расчет энергии сигналов электромиографа в выделенных ранее циклах гребли (для опорной и безопорной фаз гребка) в соответствии с авторской методикой [14]. В целом энергия цифрового сигнала рассматривается не как физическая величина, а как средство сравнения различных сигналов [6]. В случае электромиографии, энергия сигнала пропорциональна усилию, развиваемому мышцей в процессе движения [15].
Оценка стабильности двигательного паттерна гребцов-каноистов осуществляется на основе статистического анализа амплитудных и временных параметров электромио графических профилей мышц при различных
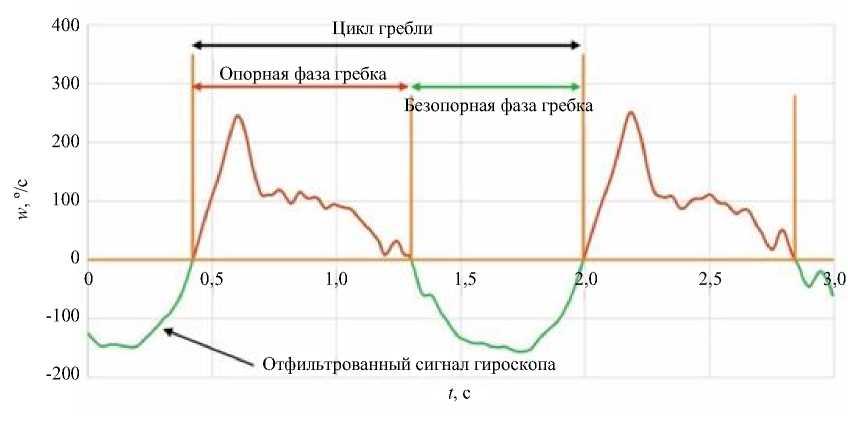
Рис. 2. Выделение циклов гребли
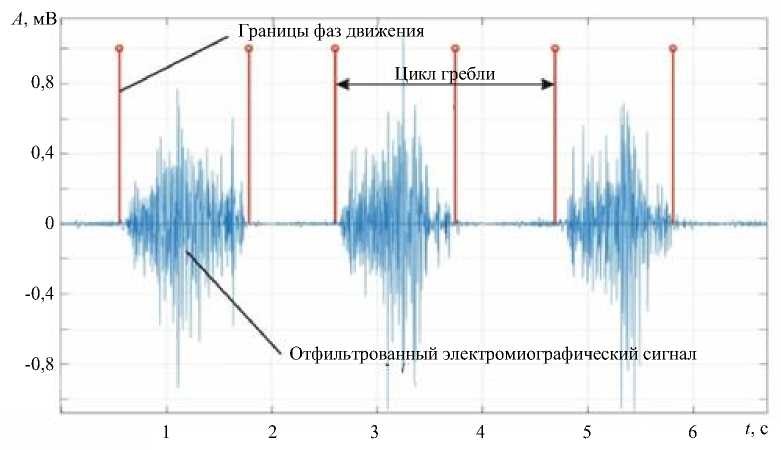
Рис. 3. Пример электромиографического профиля мышцы Latissimus Dorsi
условиях реализации движения. Для этого, в пределах заданного количества циклов гребли (не менее 10) определяется степень изменения следующих параметров: длительность цикла гребли ( T) , длительность опорной фазы гребка ( t ), энергия сигнала электромиографии исследуемых мышц в опорной фазе гребка ( E t ).
Для каждого цикла ( i ) гребли определяется отношение длительности опорной фазы гребка ( t ) к общей длительности цикла ( T) :
Δ ti =
ti
T i '
На заданном периоде наблюдения (определяется количеством циклов гребли N) рассчитывается среднее значение отношения длительности опорной фазы гребка к общей длительности цикла:
∑ N
∆ti a t- = —^=—. (4)
N
На заданном периоде наблюдения (N) рассчитывается среднеквадратичное отклонение отношения длительности опорной фазы гребка к общей длительности цикла:
/У N ( A t i -A t ср )2
A ' 1=1.11 =1'-
У = 0---------------.
N
На заданном периоде наблюдения ( N ) для каждой мышцы ( m ) рассчитывается среднее значение энергии сигнала электромиографии в опорной фазе гребка ( E t ):
N Ei г ср _ ^ i=1 '’ m
'•m = N
■
На заданном периоде наблюдения (N) для каждой мышцы (m) рассчитывается среднеквадратическое откло- нение энергии сигнала электромиографии в опорной фазе гребка:
У
1 Z N = 1 ( E m - E )2
N
.
Среднеквадратичное отклонение энергии сигнала электромиографии в опорной фазе гребка и отношения длительности опорной фазы гребка к общей длительности цикла характеризуют степень вариабельности электрофизиологических (биоэлектрической активности мышц), и кинетических (временных) параметров двигательного паттерна гребцов от цикла к циклу.
На заданном периоде наблюдения рассчитывается коэффициент стабильности временной структуры гребка:
Δt kA ‘ = (1 - V) '1°0%. (8)
Коэффициент стабильности временной структуры гребка имеет значение в диапазоне (0-100 %).
На заданном периоде наблюдения рассчитывается коэффициент стабильности мышечной активности:
у M (1 - у m )
m =1V E ср '
k E =-------- ‘m-
■ 100%,
M
где M - количество исследуемых мышц. Коэффициент стабильности мышечной активности имеет значение в ди- апазоне (0-100 %).
Таким образом, стабильность двигательного паттерна гребцов оценивается двумя показателями: коэффициентом стабильности мышечной активности и коэффициентом стабильности временной структуры гребка.
Результаты и их обсуждение
В результате проведенных исследований для каждого спортсмена были рассчитаны следующие параметры:
-
1. Коэффициент стабильности мышечной активности в режиме максимальной мощности движений ( k E ' , %) при выполнении теста 1. Позволяет оценить адаптивную способность к сохранению сформированного паттерна биоэлектрической активности мышц при высоких силовых нагрузках.
-
2. Коэффициент стабильности мышечной активности в режиме максимального темпа движений ( k E , %) при выполнении теста 2. Позволяет оценить адаптивную способность к сохранению сформированного паттерна биоэлектрической активности мышц при высоких темпах движения.
-
3. Коэффициент стабильности временной структуры гребка в режиме максимальной мощности движений ( к Л ' , %) при выполнении теста 1. Позволяет оценить адаптивную способность к сохранению ритма движения при высоких силовых нагрузках.
-
4. Коэффициент стабильности временной структуры гребка в режиме максимального темпа движений ( к Л ' , %) при выполнении теста 2. Позволяет оценить адаптивную способность к сохранению ритма гребли при высоких темпах движения.
Данные, характеризующие индивидуальную стабильность мышечной активности гребцов в режиме максимальной мощности движений ( k E ' , %) и в режиме максимального темпа движений ( k E , %), представлены в табл.
Анализ данных позволяет сделать вывод, что для квалифицированных представителей гребли на каноэ характерна высокая стабильность реализации паттерна биоэлектрической активности мышц во время гребли (в среднем более 86 %) вне зависимости от мощности и темпа движений. Это свидетельствует об эффективном овладении двигательными навыками и высоком уровне развития координационных способностей. При этом наблюдается тенденция повышения стабильности мышечной активности гребцов с увеличением тренировочного стажа (коэффициент корреляции Пирсона r = 0,70 для режима максимальной мощности движений и r = 0,73 для режима максимального темпа движений). Следует также отметить, что характер распределения мышечных усилий в опорной фазе гребка при выполнении тестов 1 и 2 не изменяется, но при этом наблюдается увеличение активности основных мышечных
Коэффициенты стабильности мышечной активности гребцов и временной структуры гребка
|
Спортсмены |
Возраст, лет |
Стаж занятий, лет |
k E t , % |
k E , % |
к Л t , % |
к Л , % |
|
1 |
20 |
7 |
87,23 |
85,12 |
95,49 |
95,82 |
|
2 |
21 |
7 |
80,11 |
81,31 |
95,88 |
94,99 |
|
3 |
21 |
8 |
82,02 |
84,47 |
69,38 |
93,91 |
|
4 |
21 |
9 |
85,90 |
86,39 |
96,70 |
97,02 |
|
5 |
22 |
8 |
86,34 |
81,09 |
96,66 |
96,06 |
|
6 |
22 |
10 |
83,29 |
88,03 |
74,97 |
95,46 |
|
7 |
22 |
10 |
85,48 |
85,64 |
95,33 |
96,31 |
|
8 |
23 |
9 |
87,07 |
88,66 |
95,70 |
95,62 |
|
9 |
23 |
9 |
85,13 |
87,34 |
97,95 |
96,99 |
|
10 |
23 |
10 |
85,32 |
83,71 |
97,09 |
96,57 |
|
11 |
23 |
11 |
87,26 |
86,39 |
96,10 |
97,25 |
|
12 |
24 |
13 |
85,32 |
88,23 |
94,86 |
95,98 |
|
13 |
25 |
15 |
90,36 |
88,50 |
97,11 |
96,05 |
|
14 |
26 |
13 |
94,06 |
90,79 |
96,82 |
96,17 |
|
15 |
26 |
14 |
89,60 |
89,95 |
96,48 |
97,17 |
|
16 |
27 |
16 |
90,41 |
88,99 |
96,67 |
96,83 |
|
Математическое ожидание ± среднеквадратичное отклонение |
23,20 ± 2,04 |
10,56 ± 2,83 |
86,55 ± 3,42 |
86,54 ± 2,85 |
93,32 ± 8,35 |
96,14 ± 0,88 |
Pectoralis major R
Pectoralis major R
Biceps brachii L
Latissimus dorsi L
Rectus abdominis L
Rectus femoris L
Triceps brachii L
Rectus abdominis R
Rectus femoris R
Triceps brachii R
Biceps brachii R
Biceps brachii L
Rectus abdominis L
Latissimus dorsi R
Latissimus dorsi L
Rectus femoris L
Triceps brachii L
Rectus abdominis R
Rectus femoris R
Triceps brachii R
Biceps brachii R
Latissimus dorsi R
Pectoralis major L Математическое ожидание
Cреднеквадратичное отклонение
а
Pectoralis major R
Pectoralis major L Математическое ожидание Cреднеквадратичное отклонение б
Pectoralis major R
Biceps brachii L
Latissimus dorsi L
Rectus abdominis L
Rectus femoris L
Triceps brachii L
Biceps brachii R
Rectus abdominis R Rectus abdominis L
Latissimus dorsi R
Latissimus dorsi L
Triceps brachii R Triceps brachii L
Rectus femoris R
Rectus femoris L
Biceps brachii L
Rectus abdominis R
Rectus femoris R
Triceps brachii R
Biceps brachii R
Latissimus dorsi R
Pectoralis major L Математическое ожидание
Cреднеквадратичное отклонение в
Pectoralis major L Математическое ожидание Cреднеквадратичное отклонение г
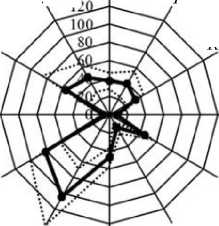
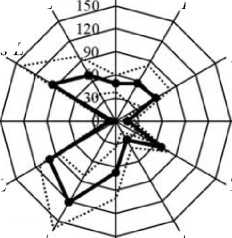
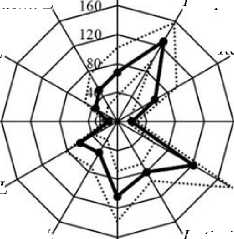
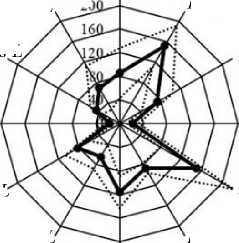
Рис. 4. Распределения усилий исследуемых мышц в опорной фазе гребка: а - спортсмены-левши, тест 1; б - спортсмены-левши, тест 2; в – спортсмены-правши, тест 1; г – спортсмены-правши, тест 2
групп в режиме максимального темпа выполнения тестового задания.
Это связано с тем, что тестовое задание 2 характеризуется высокой интенсивностью, которую необходимо поддерживать в течение определенного промежутка времени. На рис. 4 представлены лепестковые диаграммы распределение биоэлектрической активности ( А , мВ) исследуемых мышц при выполнении тестов 1 и 2.
Данные, характеризующие индивидуальную стабильность временной структуры гребка в режиме максимальной мощности движений ( k Λ t , %) и в режиме максимального темпа движений ( k Λ t , %), представлены в табл.
Анализ данных позволяет сделать вывод, что для квалифицированных представителей гребли на каноэ характерна высокая стабильность ритма гребков вне зависимости от мощности и темпа движений. Это свидетельствует об эффективном овладении двигательными навыками и высоком уровне развития координационных способностей. При этом, в режиме максимального темпа движений стабильность временной структуры гребка выше ( k Λ t = 96,14 ± 0,88 %), чем в режиме максимальной мощности движений ( kp Λ t = 93,32 ± 8,35 %).
Таким образом, предложенный подход к анализу элек-тромиографических профилей мышц позволил выявить значимые диагностические показатели физической и технической подготовленности гребцов на каноэ, что подтверждается проведенными исследованиями стабильности двигательного паттерна высококвалифицированных каноистов.
Заключение
В работе рассмотрен алгоритм автоматизированной оценки стабильности двигательного паттерна гребцов-каноистов на основе амплитудно-временного анализа элек-тромиографических профилей мышц. Особенностью предложенного алгоритма является выявление новых диагностических показателей физической и технической подготовленности гребцов: коэффициентов стабильности мышечной активности и временной структуры гребка.
Проведенные в работе исследования показали эффективность предложенного подхода к оценке стабильности двигательного паттерна гребцов-каноистов. Установлено, что для квалифицированных представителей гребли на каноэ характерна высокая стабильность мышечной активности (более 86 %) и временной структуры гребков (больше 93 %) вне зависимости от мощности и темпа движений. Это свидетельствует об эффективном овладении двигательными навыками и высоком уровне развития координационных способностей. Кроме того, установлена тенденция повышения стабильности мышечной активности гребцов с увеличением тренировочного стажа (коэффициент корреляции Пирсона r = 0,7 для режима максимальной мощности движений и r = 0,73 для режима максимального темпа движений). Предложенный алгоритм автоматизированной оценки стабильности двигательного паттерна гребцов-каноистов может быть использован для объективного контроля процесса обучения технике гребли и своевременной ее коррекции, оценки степени восстановления двигательных навыков после травм опорно-двигательного аппарата, разработки новых критериев оценки эффективности решения двигательной задачи.
development of motor skills // Kinesiology Review. – 2018. – Vol. 7, № 2. – P. 99–114.
http://www.northbaycanoeclub.ca/wp-content/uploads/ 2009/12/Canoe-Technical-Template.pdf (дата обращения: 01 Мая 2022).
Финансирование. Научная работа выполнялась в рамках задания государственной программы развития физической культуры и спорта в Республики Беларусь на 2016–2020 гг. «Разработать методику оценки компонентов координационных способностей спортсменов на основе анализа биоэлектрической активности мышц в движениях со сложной двигательной структурой» (2019–2020, № гос. рег. 20191858).
Список литературы Оценка стабильности двигательного паттерна гребцов-каноистов на основе амплитудно-временного анализа электромиографических профилей мышц
- Верлин С.В., Семаева Г.Н., Маслова И.Н. Факторы, определяющие эффективность техники гребли // Ученые записки университета им. ПФ Лесгафта. - 2014. - № 4 (110). - С. 29-34.
- Давыдова Н.С. Аппаратно-программный комплекс многоканальной электромиографии для диагностики двигательных навыков человека: автореф. дис. ... канд. тех. наук . - Минск: БГУИР, 2012. - 23 с.
- Давыдова Н.С., Васюк В.Е., Парамонова Н.А. и др. Алгоритм анализа кинематических характеристик бега // Доклады Белорусского государственного университета информатики и радиоэлектроники. -2020. - Т. 18., № 8. - С. 37-45.
- Лукашевич Д.А., Васюк В.Е. Развитие силы ведущих групп мышц спортсменов-гребцов с использованием биологической обратной связи // Мир спорта. - 2018. -№ 1 (70). - С. 21-25.
- Петрушанская К.А., Витензон А.С. Трансформация электромиографического профиля мышц при патологической ходьбе // Российский журнал биомеханики. - 2002. - № 3. - С. 77-91.
- Akay M. Biomedical signal processing. - Academic press, 2012. - 392 p.
- Anderson D.I. Motor development: Far more than just the development of motor skills // Kinesiology Review. - 2018. - Vol. 7, № 2. - P. 99-114.
- Antoniou A. Digital filters: analysis, design, and signal processing applications. - McGraw-Hill Education, 2018. - 976 p.
- Bohuslavska V., Furman Y., Pityn M. et al. Improvement of the physical preparedness of canoe oarsmen by applying different modes of training loads // Journal of Physical Education and Sport. - 2017. - Vol. 17, №2 2. - P. 797-803.
- Brymer E. Skill development in canoeing and kayaking: An individualised approach // Motor Learning in Practice. -Routledge, 2010. - P. 152-160.
- Buday T. Canoe technical template. Canoe kayak canada [Электронный ресурс]. - URL: http://www.northbaycanoeclub.ca/wp-content/uploads/ 2009/12/Canoe-Technical-Template.pdf (дата обращения: 01 Мая 2022).
- Caplan N. The influence of paddle orientation on boat velocity in canoeing // International Journal of Sports Science and Engineering. - 2009. - Vol. 3, №2 03. - P. 131139.
- Chalubinska D., Truszczynska-Baszak A., Reszelewska A. et al. Twelve-week sensorimotor training as a factor influencing movement patterns of canoe slalom athletes, assessed by the functional movement screen // Biomedical Human Kinetics. - 2020. - Vol. 12, № 1. - P. 10-16.
- Davydova N., Davydov M., Osipov A. et al. Complex analysis of human movements based on the identification of amplitude-time characteristics of electromyographic patterns // Global Journal of Research in Engineering. -2019. - Vol. 19, № 5. - P. 15-26.
- Davydova N., Vasiuk V., Osipov A. et al. Estimation of athlete coordination abilities based on the reproducibility analysis of the electromyographic patterns of complex coordination movements // Journal of Engineering Science. - 2019. - Vol. XXVI, № 2. - P. 85-98.
- De Luca C.J., Gilmore L.D., Kuznetsov M. et al. Filtering the surface EMG signal: Movement artifact and baseline noise contamination // Journal of biomechanics. - 2010. -Vol. 43, № 8. - P. 1573-1579.
- Delsys. Trigno Wireless System [Электронный ресурс]. -URL: https://delsys.com/trigno/research/ (дата обращения: 01 Марта 2022).
- Dockstader S.L., Tekalp A.M. A kinematic model for human motion and gait analysis // Proc. of the Workshop on Statistical Methods in Video Processing (ECCV). -2002. - P. 49-54.
- Du J., Gerdtman C., Linden M. Signal quality improvement algorithms for MEMS gyroscope-based human motion analysis systems: A systematic review // Sensors. - 2018. -Vol. 18, № 4. - P. 1123.
- Duffy V.G. Handbook of digital human modeling: research for applied ergonomics and human factors engineering. -CRC press, 2016. - 1006 p.
- Elphinston J. Stability, sport, and performance movement: great technique without injury. - North atlantic books, 2008. - 336 p.
- Hermens H.J., Freriks B., Merletti R. et al. European recommendations for surface electromyography // Roessingh research and development. - 1999. - Vol. 8, № 2. - P. 13-54.
- Hoyt R., Muenchen R. Introduction to biomedical data science. - Lulu. com, 2019. - 258 p. Hunter M., Curinier S. Training for canoeing // Handbook of Sports Medicine and Science Canoeing. - 2019. - P. 7190.
- Janshen L., Mattes K., Tidow G. Muscular coordination of the lower extremities of oarsmen during ergometer rowing // Journal of Applied Biomechanics. - 2009. - Vol. 25, № 2. - P. 156-164.
- Latash M.L., Scholz J.P., Schöner G. Toward a new theory of motor synergies // Motor Control. - 2007. - Vol. 11. -№ 3. - P. 276-308.
- Limonta E., Squadrone R., Rodano R. et al. Tridimensional kinematic analysis on a kayaking simulator: key factors to successful performance // Sport Sciences for Health. - 2010. - Vol. 6, № 1. - P. 27-34.
- Luft A.R., Buitrago M.M. Stages of motor skill learning // Molecular neurobiology. - 2005. - Vol. 32, № 3. - P. 205216.
- Lukashevich D. Experimental substantiation of special training simulators application during canoeists' training process // Sporto mokslas. - 2017. - Vol. 3. - P. 40-46. Mackenzie H.A., Bull A.M., McGregor A.H. Changes in rowing technique over a routine one hour low intensity high volume training session // Journal of Sports Science & Medicine. - 2008. - Vol. 7, № 4. - P. 486.
- Magill R., Anderson D. Motor learning and control. - New York: McGraw-Hill Publishing, 2010. - 498 p.
- McGregor A.H., Bull A.M.J., Byng-Maddick R. A comparison of rowing technique at different stroke rates: a description of sequencing, force production and kinematics // International Journal of Sports Medicine. - 2004. - Vol. 25, № 06. - P. 465-470.
- Merletti R., Farina D. Surface electromyography: physiology, engineering, and applications. - John Wiley & Sons, 2016. - 592 p.
- Messias L.H.D., dos Reis I.G.M., Ferrari H.G. et al. Physiological, psychological and biomechanical parameters applied in canoe slalom training: a review // International Journal of Performance Analysis in Sport. -2014. - Vol. 14, № 1. - P. 24-41.
- Newell K.M. What are fundamental motor skills and what is fundamental about them? // Journal of Motor Learning and Development. - 2020. - Vol. 8, № 2. - P. 280-314.
- Pelham T.W., Burke D.G., Holt L.E. Sports performance series: the flatwater canoe stroke // Strength & Conditioning Journal. - 1992. - Vol. 14, № 1. - P. 6-9.
- Place N., Billat V. New field test to track changes of flatwater paddling performance: a preliminary study // Perceptual and Motor Skills. - 2012. - Vol. 115, № 3. - P. 933-936.
- Readi N.G., Rosso V., Rainoldi A. et al. Do sweep rowers symmetrically activate their low back muscles during indoor rowing? // Scandinavian Journal of Medicine & Science in Sports. - 2015. - Vol. 25, № 4. - P. e339-e352.
- Renshaw I., Davids K., Savelsbergh G.J. Motor learning in practice. - Routledge, 2010. - 272 p.
- Sealey R.M., Ness K.F., Leicht A.S. Effect of self-selected and induced slow and fast paddling on atroke kinematics during 1000 m outrigger canoeing ergometry // Journal of Sports Science & Medicine. - 2011. - Vol. 10, № 1. - P. 52-58.
- Shaharudin S., Zanotto D., Agrawal S. Muscle synergies of untrained subjects during 6 min maximal rowing on slides and fixed ergometer // Journal of Sports Science & Medicine. - 2014. - Vol. 13, № 4. - P. 793-800.
- Shumway-Cook A., Woollacott M.H. Motor control: translating research into clinical practice. - Lippincott Williams & Wilkins, 2007. - 680 p.
- So R.C., Michael A.T., Wong S.C. Application of surface electromyography in assessing muscle recruitment patterns in a six-minute continuous rowing effort // Journal of Strength and Conditioning Research. - 2007. - Vol. 21, № 3. - P. 724-730.
- Tomiak T., Gorkovenko A.V., Tal'nov A.N. et al. The averaged EMGs recorded from the arm muscles during bimanual "rowing" movements // Frontiers in Physiology. - 2015. - Vol. 6. - P. 349.
- Tortora G.J., Derrickson B.H. Principles of anatomy and physiology. - John Wiley & Sons, 2018. - 1248 p.
- Turpin N.A., Guevel A., Durand S. Effect of power output on muscle coordination during rowing // European Journal of Applied Physiology. - 2011. - Vol. 111, № 12. -P. 3017-3029.
- Wei G., Luo J. Sport expert's motor imagery: Functional imaging of professional motor skills and simple motor skills // Brain Research. - 2010. - Vol. 1341. - P. 52-62.
- Williams A.M., Hodges, N.J Skill acquisition in sport: Research, theory and practice. - Routledge, 2012. - 385 p.
- Woodman O.J. An introduction to inertial navigation. -University of Cambridge, Computer Laboratory, 2007. - №. UCAM-CL-TR-696.
- Zahalka F., Maly T., Mala L. et al. Kinematic analysis of Canoe stroke and its changes during different types of paddling pace-case study // Journal of Human Kinetics. -2011. - Vol. 29. - P. 25-31.
