Оценка устойчивости цифровой системы регулирования многосвязного объекта

Автор: Кудряшов Владимир Сергеевич, Иванов Андрей Валентинович, Гайдин Артур Андреевич, Свиридов Дмитрий Алексеевич
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 3 (53), 2012 года.
Бесплатный доступ
Рассмотрен подход к оценке устойчивости цифровой системы регулирования многосвязного объекта на примере колонны синтеза аммиака на основе дискретного описания. Оценка устойчивости проводилась с использованием дискретного критерия устойчивости по матрице коэффициентов системы уравнений в пространстве состояний. Полученные результаты распространяются на класс многосвязных несимметричных объектов управления.
Многосвязная система регулирования, нестационарный объект управления, оценка устойчивости, синтез аммиака
Короткий адрес: https://sciup.org/14039891
IDR: 14039891 | УДК: 681.5
Otsenka of stability of digital system of regulation by multicoherent objec
The algorithm for assessing the sustainability of digital object control system as an example of a multiply column for ammonia synthesis. The solution is performed using a discrete description of the regulatory system. Description of the system represented in the transfer functions of input-output. These results extend to a class of multiply connected unsymmetrical control objects.
Текст научной статьи Оценка устойчивости цифровой системы регулирования многосвязного объекта
Свиридов Д.А., 2012
для многосвязных объектов является достаточно сложной и не вполне решённой задачей на сегодняшний день.
В связи с этим наиболее эффективным подходом для управления такими объектами является робастное управление, которое предусматривает устойчивую работу системы в широком диапазоне и обеспечивает достаточное качество ведения процесса [1].
Для класса технологических объ ектов, характеризующихся многосвязанностью и нестационарным поведением необходимо выбрать критерий, учитывающий качество регулирования и запас устойчивости системы, который в дискретной форме можно представить:
nm
I = Е р j I Е e ji + %м min, (1) j=i V i=i /р j )
где e - ошибка управления; а - весовой коэффициент, учитывающий соотношение между интегральной квадратичной оценкой и запасом робастной устойчивости; р - весовой коэффициент, учитывающий значимость критерия по каждому выходу системы; р - запас '^^йттттво-сти; n - число выходов системы; m - 35 тво точек переходного процесса.
Примером многосвязного нестационарного объекта управления является процесс получения аммиака [2]. Экзотермический синтез аммиака протекает в 4-полочном реакторе в присутствии катализатора с промежуточным охлаждени ем между слоями. Задачей управления процессом является поддержание температуры в каждом слое катализатора в условиях изменения активности катализатора и теплофизических свойств реактора (рис. 1).
y4
_____________ W o ,4( z )W p1 ( z ) _____________ + v ( 1 + W o -1 ( z ) W P ( z ) )( 1 + W o 4,4 ( z ) W p 4 ( z ) ) +
w 'ciw (^Wp^W p , ;, 121 ( 1 + w o -1 W p )( 1 + W o 4,4( Z )W p 4( Z ) ) 1=1
+
+
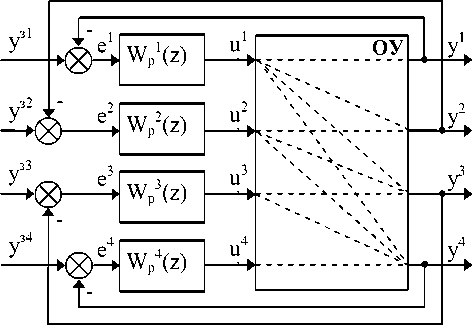
Рис. 1. Схема системы регулирования процесса синтеза аммиака: ОУ – объект управления; y1÷y4 – измеряемые выходы системы (температура в слоях катализатора); yз1÷yз4 – задающие воздействия; е1÷е4 – ошибки регулирования; u1÷u4 – управляющие воздействия (степени открытия заслонок на байпасных потоках); Wр1(z) ÷Wр4(z) – дискретные передаточные функции цифровых регуляторов
W o 3,4 ( z )W p 3 ( z )W p1 ( z ) ( W o 1,2 ( z ) W o 2,3 ( z )W p 2 ( z ) ) +
( 1 + W o,' ( , )W pM )I1 ( 1 + W W )
1=3
)
W o 3,4( Z )W p 3( Z )W p ( Z ) I W I Z ) )
( 1 + W o1^ Z )W p1 ( Z ) ) П ( 1 + W o, 1 W p )
1=3 7
y31 +
_____________ W o 2,4( Z )W p 2( Z ) _____________ ( 1 + W o 2,2 ( Z ) W p 2 ( Z ) )( 1 + W o 4,4 ( Z ) W p 4 ( Z ) )
-W3,4( z )W2,3( z )W3( z )W2( z )
+--------4-----------p------p
П ( 1 + ^W)
1=2
W3,4 ( z )W3( z ) W4,4 W4
+ о У / p У z y'3 +__о py'4
™u™\ 1 + W4,4( z )W4( z )y
П ( 1 + W, ;, 1 Wp ) o ( ) p ()
= Wc1,4( z )y '1 + Wc2,4( z )y ' 2 + Wc3,4( z )y ' 3 + Wc4,4( z )y ' 4, (5)
где
Взаимосвязь входов и выходов системы
описывается уравнениями [3]:
W o k,j(z) =
Bk,j( Z " 1 ) -j
Ak,j( z- 1) z
2 bk,j h=1
• z
-h
y1 =
W o 1,1( z )W p 1( z ) 1 + w o,1 ( z )w p ( z )
/1 = W c1,1 ( z ) y ' 1,
k,j no
1 - 2 a k, j
h=1
• z
-
y
W o 1,2( z )W p 1( z )( z ) ç1 W o 2,2( z )W p 2( z ) ç2
—о------------- У +--~-----о--- У
П ( 1 + w o,i w p ) 1 + W o 2,2( Z )W p 2( Z )
1=1
дискретная передаточная функция по основному (k=j) или перекрестному (k≠j) каналу ОУ, k = 1,4, j = k ,4 ; ak,J , bk,J , d k ,J - параметры и
= Wc1,2( z )y '1 + Wc2,2( z )y ' 2, (3)
число тактов запаздывания передаточной функции основного или перекрестного канала;
z - оператор временного сдвига;
y 3
w (ч\\Лч+ v( 1 + Wou( Z ) W p ( Z ) )( 1 + W3 ,3 ( Z ) Wp 3 ( Z ) ) +
W=(z) = Q ( Z) p Pi( z- 1)
k р
2 qh h=0
• z
-h
n р
передаточная
-Wo 1,2 ( z )W o2,3 ( z )W p2 ( z )W p ( z )
+-----------3--------------£
П ( 1+ ^W)
1=1 7
1 -2 p h • z
h=1
, -h
ç1 y
W o2,3 ( z )W p2 ( z ) ç2 W o3,3 ( z )W p3 ( z ) ç3
3 y 3,33 y
П ( 1 + W o-1 W p ) 1 + Wo ( Z ) WP( Z )
1=2
= Wc 1,3 ( z ) y '1 + Wc 2,3 ( z )y '2 + Wc 3,3 ( z ) y '3 ; (4)
функция цифрового регулятора; qi , pi , – параметры передаточной функции регулятора ; kр , nр – порядки числителя и знаменателя передаточной функции регулятора;
W c k,j( z ) =
B ck ,j( * 1 ) z -d^
A k ( z 1 )
k,j
С с + 1 l e k ■ z -n n=1
k,j nс
1 -M
В качестве дискретных моделей регуляторов и каналов объекта выбраны следующи е передаточные функции:
n=1
■ z
W р i(z) =
q °i z - 1 I q 1i z - 1
W о i • J(z) =
дискретная передаточная функция замкнутой системы; a ck,J , p ck,J , dck,J - параметры и число тактов запаздывания передаточной функции замкнутой системы, k, J = 1,4 .
b j - 1 - d 'J
1 + a j- 1 ’
где i, J = 1,2 .
Численные значения параметров дискретных моделей каналов объекта и цифровых регуляторов приведены в табл. 1 [3].
Исходя из выбранного критерия (1), одной из первых задач, возникающих при синтезе и моделировании робастной системы, является
оценка запаса устойчивости.
Учитывая дискретную форму математического описания системы, для оц енки устойчивости целесообразно применить дискретный корневой критерий, который заключается в оценке положения корней характеристического многочлена системы (2)-(5), записанной в пространстве состояний:
x (k + 1) = A ■ x(k) + b ■ u(k), y(k) = c T ■ x (k),
где x – вектор переменных состояния;A – матрица системы; b – вектор передачи управления; c – вектор наблюдения.
Для устойчивости системы регулирования необходимо, чтобы корни характеристического многочлена передаточной функции находились внутри единичного круга [4]:
|«J < 1, i = 1,2...,m, (7) где a i - собственные значения матрицы A .
Оценка устойчивости по первому выходу системы y1 определяется по передаточной функции системы (2). Для второго и последующих выходов ( y2 , y3 , y4 ) необходимо учиты-
вать наличие перекрёстных каналов связи.
Для второго выхода системы с учётом перекрёстной связи достаточно рассмотреть корни характеристического многочлена первого слагаемого уравнения связи (3), так как знаменатель второго слагаемого входит в состав первого.
Найдём корни характеристического многочлена передаточной функции:
We 1' 2(z) =
W î1,2 (z)W ð1 (z)
(1 + W^zW^a + W 1/1W i/n
Таблица 1
Параметры передаточной функции
|
Канал объекта |
Параметры моделей ОУ |
Ре-гуля-тор |
Параметры регуляторов |
|||
|
a 1 |
b, % / ºС |
d,такт |
q 0 |
q 1 |
||
|
Wо 1,1 |
0,901 |
-0,333 |
10 |
W р 1 |
-0,51 |
0,49 |
|
Wо 2,2 |
0,916 |
-0,133 |
16 |
W р 2 |
-0,51 |
0,49 |
|
Wо 1,2 |
0,927 |
0,043 |
18 |
– |
– |
– |
Отсюда получим
We 1’2 (z) =
b1 1,2 z
1 + a
(1 +
.-J
- 1-d1 ’ 2
q0 1 z
-J
+ 0 1* 2
-J
1,2
z
-
1 - z
-
b1 1,1 z
-
- 1-d1 ’ 1
q0 1 z
-
+ 0 1* 2
-
X
1 + a
(1 +
b
1,1
z
-
2,2
1 . я 2,2 7-1
1 + a 1 z
1 - z
-
В начале цикла работы катализатора в процессе синтеза аммиака время транспортного запаздывания по каналам не превышает 180 с, что при длительности такта квантования дискретной системы Т 0 =10 с соответствует числам тактов запаздывания d, приведенным в табл. 1. Отсюда передаточная функция (8) примет вид
W^z) =
B с 1,2 (z)
A с 1,2(z),
где B61l2(z) = b5z - 23 + b4z - 22 + b3z - 21 + b2z - 20 + b 1 z - 19,
Д Я 7-31+Я 7-3°+Я 7-29+Я 7-28+ Я 7-21+ х A^ (z) a19z I ^*18z i ^a 17z I ^*16z + ^*15z
+ Я 7-2°+Я 7-19+Я 7-18+Я 7-17+Я 7-15+ Я 7-14 4-
I ^114 z I ^113 z I ^112 z I ^111 z I ^11° z I ^19 z
-13 . -12 . -11 . -5 . -4 .
I a 8 z I a 7 z I a 6 z I a 5 z I a 4 z I a 3 z I
I a2z I a1z— 1.
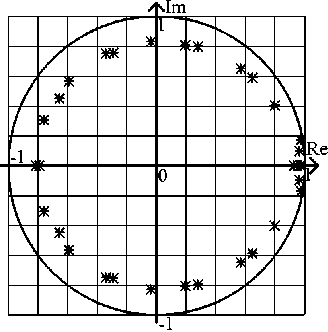
Рис. 2. Расположение корней характеристического многочлена
По условию (7) можно сделать вывод, что система устойчива. Динамические характеристики системы, представленные на рис. 3, подтверждают полученную оценку корневого критерия.
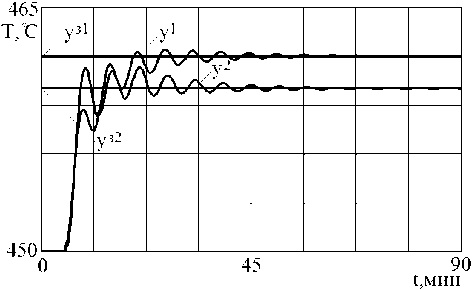
Рис. 3. Динамические характеристики системы в начале цикла работы катализатора
В процессе работы реактора синтеза аммиака повышается инерционность по каналам объекта. В конце эксплуатационного пери ода катализатора величина чистого запаздывания по каналам составляет d1,1 = 13, d1,2 = 22, d2,2 = 20 (табл. 1) . Полиномы передаточной функции (9) примут вид (рис. 2):
B61,2(z) = b 5 z - 28 + b4z - 27 + b3z - 26 + b2z - 25 + b 1 z - 24,
Д 1,2 -38 -37 -36 -35
x A^ (Z) a^z + d1sZ + anz + a^z + a^z
. _ _-24 . _ -23 . _ -22 . _ -21 . _ -18 . _-17 .
+a.14Z + a^z + a^z + ^nZ + OiqZ + a^z
+ a8z - 16 + a7z - 15 + a6z - 14 + a5z - 5 + a4z -4 + a3z - 3 +
+ a 2 z + a 1 z —1.
При этом расположение корней характеристического многочлена показано на рис.4.
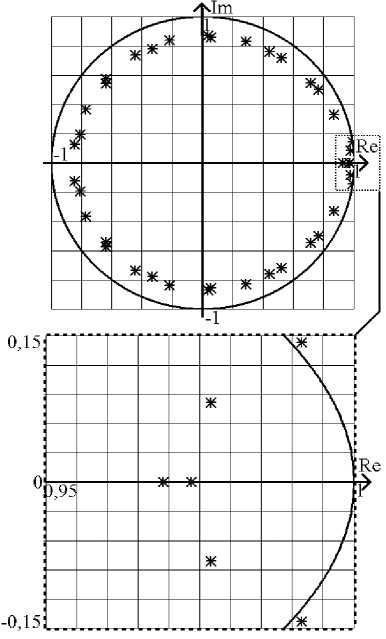
Рис. 4. Расположение корней характеристического многочлена в конце эксплуатационного периода катализатора
Повышение инерционности по каналам объекта приводит к увеличению числа корней характеристического многочлена системы , росту их величин |a max| = 1,00181 > 1 и, как следствие, к неустойчивой работе системы, что подтверждается динамическими характеристиками на рис. 5.
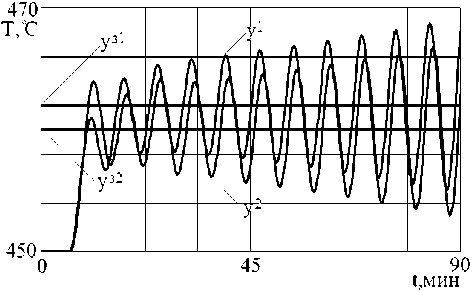
Рис. 5. Динамические характеристики системы в конце цикла работы катализатора
Для оценки устойчивости в течение всего цикла работы катализатора проведено моделирование системы в различных временных интервалах работы реактора (табл. 2).
Таблица 2
Значения максимальных корней в различные периоды работы реактора
|
№ интервала |
Запаздывание по каналам объекта |
|α max | |
||
|
d 11 |
d 12 |
d 22 |
||
|
1 |
10 |
18 |
16 |
0,98959 |
|
2 |
11 |
19 |
17 |
0,99472 |
|
3 |
12 |
20 |
18 |
0,99869 |
|
4 |
13 |
22 |
20 |
1,00181 |
|
5 |
14 |
24 |
22 |
1,00428 |
Hа рис. 6. показан характер измен ения максимальных значений корней характеристического полинома.
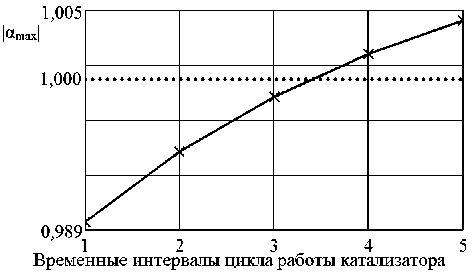
Рис. 6. Зависимость максимальных значений корней в течение всего цикла работы катализатора
Для оценки запаса устойчивости η в критерии робастности (1) целесообразно воспользоваться минимальным отклонением:
η= 1 -α max ,
Для третьего (4) и четвертого (5) выходов системы оценка устойчивости проведена аналогично.
Рассмотренный подход к оценке устойчивости многосвязной системы регулирования может быть эффективно использован при синтезе робастных систем управления многомерными технологическим объектами.
