Оценка устойчивости многосвязной цифровой системы управления процессом экстрактивной ректификации

Автор: Кудряшов В.С., Чертов Е.Д., Иванов А.В., Гайдин А.А., Глазкова Е.В.
Журнал: Вестник Воронежского государственного университета инженерных технологий @vestnik-vsuet
Рубрика: Информационные технологии, моделирование и управление
Статья в выпуске: 2 (68), 2016 года.
Бесплатный доступ
Рассмотрен подход к анализу устойчивости цифровой системы управления связанным нестационарным объектом на примере процесса ректификации. Объект моделирования с перекрёстными связями и управляющая часть системы описаны дискретными передаточными функциями в операторах сдвига. Получены уравнения связи по каждому выходу замкнутой системы. Для решения поставленной задачи разработан алгоритм оценки запаса устойчивости многосвязных цифровых систем управления на основе дискретного корневого критерия, включающий следующие основные этапы: получение характеристического полинома замкнутой системы по каждому выходу; вычисление собственных значений матрицы системы в пространстве состояний с целью определения корней характеристического уравнения и устойчивости системы; определение устойчивости и запаса устойчивости по величине отклонения модуля максимального корня от границы устойчивости. Для получения характеристического полинома в качестве дискретных моделей регуляторов и каналов объекта используем передаточные функции первого порядка с транспортным запаздыванием. Моделирование проводилось при различных параметрах объекта управления, которые характеризовали устойчивое и неустойчивое состояние системы. Проведён анализ численных значений корней и характер их расположения на комплексной плоскости, позволивший сделать вывод о том, что система устойчива или неустойчива. Для подтверждения полученных результатов рассчитаны и приведены динамические характеристики замкнутой системы при различных состояниях объекта, которые подтверждают полученную оценку корневого критерия. Для определения запаса устойчивости цифровой многосвязной системы в работе предложено использовать отклонение максимального корня характеристического уравнения от границы устойчивости. Полученные результаты распространяются на класс многосвязных симметричных объектов управления. Рассмотренный подход к оценке устойчивости многосвязной системы регулирования может быть эффективно использован в автоматизированном режиме при синтезе робастных систем управления многомерными технологическими объектами.
Многосвязная цифровая система управления, нестационарный технологический объект, устойчивость, характеристический полином
Короткий адрес: https://sciup.org/14040629
IDR: 14040629 | DOI: 10.20914/2310-1202-2016-2-69-77
Estimation of multiply digital process control system extractive distillation stability
An approach to stability analysis of digital control systems associated non-stationary object on the example of the rectification process. Object modeling with cross-connections and the control scheme of the described system, discrete transfer functions in the shift operators. The equations of connection for each output of the closed-loop system. To solve this problem developed an algorithm for estimating the margin of stability of multivariable digital control systems based on the discrete root criterion, comprising the following main stages: obtaining of the characteristic polynomial of the closed-loop system for each output; computation of eigenvalues of the system matrix in the state space to determine roots of the characteristic equation and the stability of the system; determination of the stability and margin of stability by the deviation of maximum module of the root from the boundary of the high variability. To obtain the characteristic polynomial of a as discrete models of controllers and channels of IP object-use the transfer function of the first order with transport delay. The simulation was performed at different parameters of the control object, which is characterized by a stable and an unstable state of the system. VA-den analysis of the numerical values of the roots and character of their location on the complex plane, which to you-water that the system is stable or unstable. To confirm the obtained results were calculated and presented dynamic characteristics of the closed-loop system under different conditions, which confirm the initial assessment, the root criterion. To determine the factor stability of multivariable digital systems is proposed to use the deviation of the maximum root of the characteristic equation from the stability boundary. The obtained results apply to the class of symmetric multivariable control objects. The approach to assessing the sustainability of multivariable system regulation can be effectively used in automatic mode during the synthesis of robust control systems multidimensional technological objects.
Текст научной статьи Оценка устойчивости многосвязной цифровой системы управления процессом экстрактивной ректификации
В результате анализа технологического
Большинство технологических объектов характеризуется нестационарностью динамических характеристик, что с течением времени может привести к снижению качества работы системы управления и потере устойчивости. В настоящее время существует большое число подходов к синтезу систем управления такими объектами, среди которых можно выделить:
─ теорию адаптивных систем;
─ теорию систем с элементами нечёткой логики;
─ теорию нейронных сетей;
─ теорию робастного управления.
Несомненно, каждый из них имеет как достоинства, так и недостатки, однако в ряде случаев использование теории робастного управления позволяет упростить как синтез, так и реализацию системы с обеспечением требуемого качества управления на всём эксплуатационном периоде работы технологического объекта [1]. При этом одной из важнейших задач при аналитическом проектировании робастныхсистем автоматического управления является обеспечение устойчивого состояния и определение запаса устойчивости в рабочем диапазонеизмене-ния технологических параметров объекта. Применение большинства существующих методов оценки устойчивости ориентировано на аналоговые системы, математическим аппаратом которых являются дифференциальные уравнения. Использование этих методов для анализа устойчивости цифровых систем управленияза-труднительно и не всегда корректно, а для многосвязных нестационарных объектов – практически нереализуемо. Отсюда возникает задача разработки алгоритма оценки устойчивости многосвязных цифровых систем управления.
Результаты и обсуждение
В качестве примера рассмотрим двумерный объект – технологический процесс экстрактивной ректификации (ЭР), предназначенный для выделения дивинила-сырца из бути-лен-дивинильной фракции (БДФ) в присутствии диметилформамида, используемого как экстрагент. В процессе ЭР БДФ дивинил является целевым продуктом, качество которого определяется требованиями процесса полимеризации, поэтому основной задачей управления является стабилизация состава дивинила-сырца и уменьшение потерь дивинила с бутиленовой фракцией.
процесса выявлены управляющие и управляемые параметры [2]:
─ управляющие параметры – расход флегмы u 1 и расход теплоносителя в куб колонны u 2 ;
─ управляемые параметры – концентрация бутиленов в дивиниле-сырце y 2 и потери дивинила с бутиленовой фракцией y 1 ;
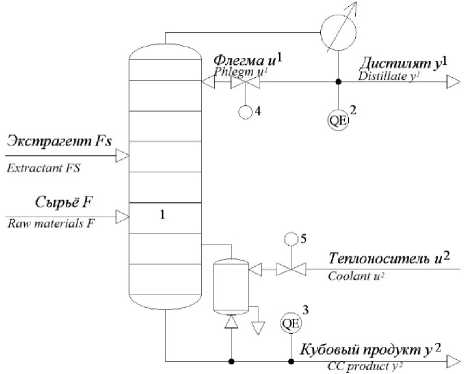
Рисунок 1. Схема процесса экстрактивной ректификации: 1 – колонна; 2, 3 – датчики концентраций дивинила в дистилляте и бутиленов в кубовом продукте; 4, 5 – регулирующие клапаны подачи флегмы на орошение и теплоносителя в куб колонны
-
Figure 1. Scheme of extractive distillation process : 1 – column; 2, 3 – butadiene concentration detectors in the distillate and butenes in a cube product; 4, 5 – regulating filing reflux valves for irrigation and coolant in the cube of the column
Анализ технологического процесса, проведённый на основе исследования статических и динамических режимов работы установки, позволяет сделать вывод, что на показатели качества – концентрацию дивинила в дистилляте y 1 и концентрацию бутиленов в кубовом продукте y 2 – наиболее существенное влияние оказывают расход флегмы u 1 расход теплоносителя в куб колонны u 2 соответственно. Кроме того, существуют внутренние перекрёстные связи между параметрами процесса [2, 3].
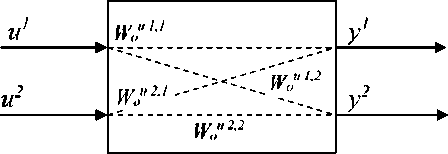
Рисунок 2. Структурная схема взаимосвязей параметров процесса
-
Figure 2. Interconnections block diagram of process parameters
Основные каналы: W о u1,1 – расход флегмы ( u 1 ) – концентрация дивинила в дистилляте ( y u1,1 ); Wоu2 ,2 – расход пара в куб колонны – концентрация бутиленов в кубовом продукте ( y u2,2 ). Перекрёстные каналы: W о u1,2 – расход флегмы ( u 1 ) – концентрация бутиленов в кубовом продукте ( y u1,2 ); W о u2,1 – расход пара в куб колонны – концентрация дивинила в дистилляте ( y u2,1 ).
Рассмотрим простейший вариант системы – управления, включающий два регулятора обратной связи.
i j=1 2 ; aс i j , bс i j , dс i j – то же для передаточных функций системы, k i , n i – порядки числи-
теля и знаменателя; z – оператор сдвига.
Дискретная передаточная функция циф-
рового регулятора:
W p i (z)=
Q i (z -1 ) = u i (z)
P i (z -1 ) e i (z)
i
k р -h-di
Z q hx z р
h=0
niр
1 - Z p^z -h
h=1
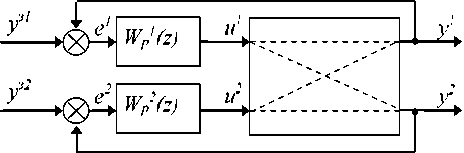
Рисунок 3. Структурная схема системы управления
Figure 3. Block diagram of the control system
где Q i (z -1 ) , P i (z -1 ) – полиномы числителя
и знаменателя, i = 1 2 ; q i , p i , d i р – настроечные параметры дискретной передаточной функции цифрового регулятора; k i р , n i р – порядки числителя и знаменателя передаточной функции; u i (z) – выходы регуляторов.
Из системы (1), получим уравнения связи
Опишем замкнутую систему в матричной форме:
е = yз-y,
u = W р u·е, (1)
y = W о ·u,
где e – вектор ошибок управления; yз – вектор задающих воздействий; y – вектор выходов ОУ; и – вектор управляющих воздействий; W о , W р –
по каждому выходу:
w p (W + П ( w p ) | П ( wy ) - w o • W • 1 ) y 1 = —2------=1 ----^^- y 31 +
П ( 1 + W O" w p ) - П ( w p ) ( w w- ■ 1 ) (2)
i=1 i=1
соответственно матрица дискретных переда-
W o2 , 1 (z)W p1 (z)
+22y n ( 1 + W O ' i w p ) - n ( w p )( W o1 , 2 W 21 ) i=1 i=1
= W C • 1 (z)y 31 +Wc 2 • 1 (z)y 32
точных функций объекта по основным и пере-
крёстным каналам, 2 х 2 и диагональная матрица цифровых регуляторов, 2 х 2.
2 W o 1 , 2 (z)W p 2 (z) з1
y=22 y+
П ( j + W O ' W pi ) - П ( w p )( W 12 W2 ; ' )
W u o
Wu1,1(z) o
Wu1,2(z) o
Wu2’1(z)
0 , W
Wu2,2(z) р
o _
W1 (z) 0
р
0 W2 (z)
р
Дискретные передаточные функции по каналам объекта ( W о ) и замкнутой системы по каждому выходу ( W с ) имеют следующую структуру:
W2p(z)W2-2 + П ( w p ) [ П ( w o • - ■) - w^w o-1 1
+-----2 ---------^ 2=1 y 32
П ( 1 + wyw p ) - П ( w p )( w p^ w2 ; 1 )
i=1 i=1
= W’ ;2 (z)y 31 +Wc 2,2 (z)y 32
W о,ic,j (z)=
B о,ci j (z -1 ) ×z-d iо,,jc
Aо,ci j(z-1)
k с i j +1
i j -h о,ch
i j
n с
i j -h
о,ch
×z
i j о,c
,
где B i j (z -1 ) , A i j (z -1 ) – полиномы числителя о,c о,c
и знаменателя передаточной функции канала объекта или замкнутой системы соответ-
ственно, i j=1 2 ; aо i j , bо i j , dо i j – параметры
передаточных функций и число тактов запаздывания основных и перекрёстных каналов,
Для решения поставленной задачи разработан алгоритм оценки запаса устойчивости многосвязных цифровых систем управления на основе дискретного корневого критерия, включающий следующие основные этапы:
-
1. Получение характеристического полинома замкнутой системы по каждому выходу.
-
2. Вычисление собственных значений матрицы системы в пространстве состояний с целью определения корней характеристического уравнения и устойчивости системы.
-
3. Определение устойчивости и её запаса по величине отклонения модуля максимального корня от границы устойчивости.
-
Анализ уравнений связи (2, 3) показывает, что знаменатели передаточных функций замкнутых систем по первому и второму выходам идентичны, следовательно, для получения характеристического полинома системы рассмотрим знаменатель передаточной функции по первому выходу Wc 1 , 1 (z) :
w ' (z)w o , + П ( W p ) [ П ( w o" ) - w , 2 W 2 ,1
w c , ' (z) =---2------=-----Ч1--------------
П ( i+w o , w p ) - n ( w p )( w ■ 2 W 2 ■ 1 ) i=1 i=1
Для получения характеристического полинома замкнутой системы в качестве дискретных моделей регуляторов и каналов объекта используем передаточные функции первого порядка:
i q 0 i +q 1 i z - i,j b 1 ,j z - -
W р (z)= 1-z-1 , W о (z)=1+a1i,jz-1,
Отсюда, передаточная функция замкнутой системы по первому выходу примет вид:
x
W c1,1 (z)=
B с 1,1 (z) A с 1,1 (z)
q 0 1 +q 1 1 z -1 b1 1,1 z -1-d1,1 1-z -1 1+a1 1,1 z -1
1 + b l'^- 'd1 q ?+ q ?z- Y 1 + b?'2^1 " q Q +q l z 1 l+a l'V 1-z - J| 7+a1 2'2 z -1 1-z 1
q 0 1 +q 1 1 z -1 q0 2 +q1 2 z -1 b1 1,2 z -1-d1,2 b1 2,1 z -1-d2,1
1-z -1 1-z -1 1+a1 1,2 z -1 1+a1 2,1 z -1
+
q ? +q ? z - q?+q?z - Г b?^ 1-1' '' b^z 11 ” b112z 1-1'1 b1 2 z '
1-z - 1-z 1 I 1+a1 1'1 z -1 1+a ?'2 z -1 1-u 2 z -1 1+a ?'1 z -1
<Г 1 + b ^ z 1-'1 q O^^ If 1 + bJ^z -1-2_ q o2 +q i! z 1 )
| 1+a'' 'z-1 1-z1 J| 1+a?' 2z-1 1-z* J qo'+q''z-' qo2+q?z' b?2z1d1’2 b;L''zJ'1,’1
v" 1-z -' 1-z -' 1+a '1'2 z -1 1+a ?' ' z -1 ,
Параметры моделей системы управления
Таблица 1
Options of control system models
Table 1
|
Канал объекта |
Длительность такта квантования Т 0 , мин |
Параметры моделей ОУ |
Регулятор |
Параметры регуляторов |
|||
|
a 1 |
b i , %/ºС |
d , такт |
q 0 |
q 1 |
|||
|
W0 1 1 |
1,2 |
0,958 |
-0,204 |
18 |
Wp 1 |
-0,0896 |
0,0831 |
|
W0 2 2 |
0,974 |
-0,293 |
5 |
Wp 2 |
-0,289 |
0,273 |
|
|
W0 1 2 |
0,983 |
0,016 |
11 |
– |
– |
– |
|
|
W0 2 1 |
0,982 |
0,094 |
40 |
– |
– |
– |
|
Номинальное состояние объекта управления с рассчитанными при этом оптимальными настройками цифровых регуляторов характеризуется параметрами, представленными в таблице 1.
Полиномы числителя и знаменателя передаточной функции Wс 1 1 (z) будут иметь следующий вид:
B e 1 ■ ' (z) = b 57 z5 + b 56 z5 + b 55 z5 + b 54 z 5 + + b J^ z 53 + b 29Z 29 + b 2 8z 28 + b 27Z 27 + b 26 z26 + + b 25Z 25 + b 2^ z 24 + b 23Z 23 + b 22 z 22 + b 2'Z 2' + -20 -19
+b 20 z + b 19z
Aс1 , 1(z) = a 57z-57 + a 56z-56 + a 55z-55 + a 54z-54 + a 53z-53 + + a 29z -29 + a 28z -28 + a 27z -27 + a 26z -26 + a 25z -25 + a 24z -24 + -23 -22 -21 -20 -19 -11
+ a 23 z + a 22 z + a 21 z + a 20 z + a 19 z + a 11 z +
+ a 10z-10 + a 9z-9 + a 8z-8 + a 7z-7 + a 6z-6 + a 5z-5 + a 4 z-4 + + a 3z-3 + a 2z-2 + a 1z-1 -1.
Структура коэффициентов характеристического полинома Aс 1 , 1 (z) , состоящих из параметров передаточных функций каналов объекта и регуляторов, приведена в таблице 2.
Таблица 2
Составляющие коэффициентов характеристического полинома
The components of the characteristic polynomial coefficients
Table 2
|
Коэффициент полинома |
Многочлены слагаемых полинома |
|
a 1 |
–(– a 111 a 122 b 12 b 21 q 111 q 122 ) |
|
a 2 |
–( a1 11 b 12 b 21 q1 11 q1 22 + a1 22 b 12 b 21 q1 11 q1 22 – a1 11 a1 22 b 12 b 21 q0 11 q1 22 – a1 11 a1 22 b 12 b 21 q1 11 q0 22 ) |
|
a 3 |
–( a1 11 b 12 b 21 q0 11 q1 22 – b 12 b 21 q1 11 q1 22 – a1 11 b 12 b 21 q1 11 q0 22 + a1 22 b 12 b 21 q0 11 q1 22 + a1 22 b 12 b 21 q1 11 q0 22 – a1 11 a1 22 b 12 b 21 q0 11 q0 22 ) |
|
a 4 |
–( a1 11 b 12 b 21 q0 11 q0 22 – b 12 b 21 q1 11 q0 22 – b 12 b 21 q0 11 q1 22 + a1 22 b 12 b 21 q0 11 q0 22 ) |
|
a 5 |
–(– b 12 b 21 q 011 q 022 ) |
|
a 6 |
–( a 112 a 121 b 11 b 22 q 111 q 122 ) |
|
a 7 |
–( a 112 a 121 b 11 b 22 q 011 q 122 – a 121 b 11 b 22 q 111 q 122 – a 112 b 11 b 22 q 111 q 122 + a 112 a 121 b 11 b 22 q 111 q 022 ) |
|
a 8 |
–( b 11 b 22 q 111 q 122 – a 112 b 11 b 22 q 011 q 122 – a 112 b 11 b 22 q 111 q 022 – a 121 b 11 b 22 q 011 q 122 – a1 21 b 11 b 22 q1 11 q0 22 + a1 12 a1 21 b 11 b 22 q0 11 q0 22 ) |
|
a 9 |
–( b 11 b 22 q 011 q 122 + b 11 b 22 q 111 q 022 – a 112 b 11 b 22 q 011 q 022 – a 121 b 11 b 22 q 011 q 022 ) |
|
a 10 |
–( b 11 b 22 q 011 q 022 ) |
|
a 11 |
–( a 112 a 121 a 122 b 11 q 111 ) |
|
a 19 |
–( a1 12 a1 21 a1 22 b 11 q0 11 – a1 12 a1 22 b 11 q1 11 – a1 21 a1 22 b 11 q1 11 – a1 12 a1 21 b 11 q1 11 – a1 12 a1 21 a1 22 b 11 q1 11 ) |
|
a 20 |
–( a 112 b 11 q 111 + a 121 b 11 q 111 + a 122 b 11 q 111 – a 112 a 121 b 11 q 011 + a 112 a 121 b 11 q 111 – a 112 a 122 b 11 q 011 – a1 21 a1 22 b 11 q0 11 + a1 12 a1 22 b 11 q1 11 + a1 21 a1 22 b 11 q1 11 – a1 12 a1 21 a1 22 b 11 q0 11 ) |
|
a 21 |
–( a 112 b 11 q 011 – b 11 q 111 + a 121 b 11 q 011 – a 112 b 11 q 111 – a 121 b 11 q 111 + a 122 b 11 q 011 – a 122 b 11 q 111 + a 112 a 121 b 11 q 011 + a 112 a 122 b 11 q 011 + a 121 a 122 b 11 q 011 ) |
|
a 22 |
–( b 11 q 111 – b 11 q 011 – a 112 b 11 q 011 – a 121 b 11 q 011 – a 122 b 11 q 011 ) |
|
a 23 |
–( b 11 q 011 ) |
|
a 24 |
–( a 111 a 112 a 121 b 22 q 122 ) |
|
a 25 |
–( a1 11 a1 12 a1 21 b 22 q0 22 – a1 11 a1 21 b 22 q1 22 – a1 12 a1 21 b 22 q1 22 – a1 11 a1 12 b 22 q1 22 – a1 11 a1 12 a1 21 b 22 q1 22 ) |
|
a 26 |
–( a 111 b 22 q 122 + a 112 b 22 q 122 + a 121 b 22 q 122 – a 111 a 112 b 22 q 022 – a 111 a 121 b 22 q 022 + a 111 a 112 b 22 q 122 + a 111 a 121 b 22 q 122 – a 112 a 121 b 22 q 022 + a 112 a 121 b 22 q 122 – a1 11 a1 12 a1 21 b 22 q0 22 ) |
|
a 27 |
–( a 111 b 22 q 022 – b 22 q 122 – a 111 b 22 q 122 + a 112 b 22 q 022 + a 121 b 22 q 022 – a 112 b 22 q 122 – a1 21 b 22 q1 22 + a1 11 a1 12 b 22 q0 22 + a1 11 a1 21 b 22 q0 22 + a1 12 a1 21 b 22 q0 22 ) |
|
a 28 |
–( b 22 q 122 – b 22 q 022 – a 111 b 22 q 022 – a 112 b 22 q 022 – a 121 b 22 q 022 ) |
|
a 29 |
22 22 11 12 21 22 –( b q 0 + a 1 a 1 a 1 a 1 ) |
|
a 53 |
–(– a 111 a 112 a 121 – a 111 a 112 a 122 – a 111 a 121 a 122 – a 112 a 121 a 122 –2 a 111 a 112 a 121 a 122 ) |
|
a 54 |
–( a1 11 a1 12 + a1 11 a1 21 + a1 11 a1 22 + a1 12 a1 21 + a1 12 a1 22 + a1 21 a1 22 +2 a1 11 a1 12 a1 21 + 2 a1 11 a1 12 a1 22 + 2 a 111 a 121 a 122 + 2 a 112 a 121 a 122 + a 111 a 112 a 121 a 122 ) |
|
a 55 |
–( a 111 – a 112 – a 121 – a 122 –2 a 111 a 112 –2 a 111 a 121 –2 a 111 a 122 –2 a 112 a 121 –2 a 112 a 122 –2 a 121 a 122– 11 12 21 11 12 22 11 21 22 12 21 22 a 1 a 1 a 1 – a 1 a 1 a 1 – a 1 a 1 a 1 – a 1 a 1 a 1 ) |
|
a 56 |
–(2 a 111 + 2 a 112 + 2 a 121 + 2 a 122 + a 111 a 112 + a 111 a 121 + a 111 a 122 + a 112 a 121 + a 112 a 122 + a 121 a 122 +1) |
|
a 57 |
–(– a 111 – a 112 – a 121 – a 122 –2) |
Представим знаменатель (4) в виде матрицы коэффициентов в переменных состояния:
|
" 0 |
... о |
о •■• |
0 |
0 |
... о |
о" |
|
|
0 |
... о |
о •■• |
0 |
0 |
... о |
о |
|
|
0 |
... о |
о •■• |
0 |
0 |
... о |
о |
|
|
0 |
... 1 |
о •■• |
0 |
0 |
... о |
о |
|
|
A = |
0 |
... о . • : |
1 . |
0 |
0 |
... о . : |
о |
|
0 |
... о |
о •■• |
0 |
0 |
... о |
о |
|
|
0 |
. о |
о •■• |
0 |
0 |
.. 1 |
о |
|
|
0 |
. • о |
о . |
0 |
0 |
.. о |
1 |
|
|
_ a57 |
. a53 |
о . |
0 |
a11 |
. а2 |
а1. |
Анализ структуры коэффициентов полинома знаменателя передаточной функции (таблица 2) и матрицы коэффициентов в переменных состояния позволяет сделать следующие выводы:
─ численные значения коэффициентов характеристического полинома А с 1 , 1 (z) определяются значениями параметров моделей всех каналов и регуляторов;
─ при неизменных порядках моделей каналов, регуляторов и значениях транспортного запаздывания структура коэффициентов полинома и размерность матрицы в переменных состояния сохраняются, при этом собственные значения матрицы будут изменяться в условиях нестационарности;
─ значительное влияние на структуру коэффициентов полинома оказывает изменение структуры моделей каналов и регуляторов, а также величины транспортного запаздывания по любому каналу объекта.
─ Таким образом, в соответствии с предложенным алгоритмом для оценки устойчивости системы необходимо:
─ вычислить коэффициенты характеристического полинома на основе численных значений параметров дискретных моделей каналов объекта и настроек цифровых регуляторов (таблица 1).
─ определить собственные значения матрицы коэффициентов в пространстве состояния, которые являются корнями характеристического уравнения замкнутой системы.
Определив корни характеристического уравнения, покажем характер их расположения на комплексной плоскости:
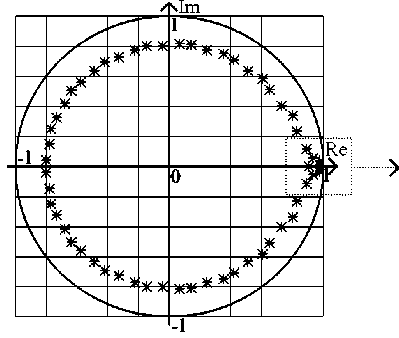
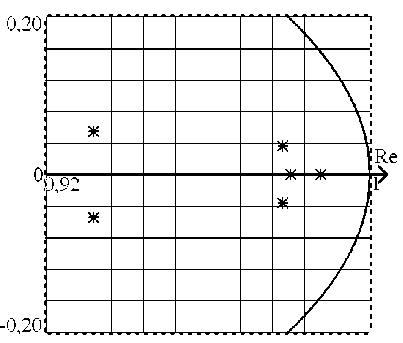
Рисунок 4. Расположение корней характеристического уравнения
Figure 4. Characteristic equation roots location
Анализ численных значений корней и характер их расположения на комплексной плоскости, позволяют сделать вывод, о том, что система устойчива. Для подтверждения полученных результатов проведено моделирование работы замкнутой системы. Динамические характеристики подтверждают полученную оценку корневого критерия.
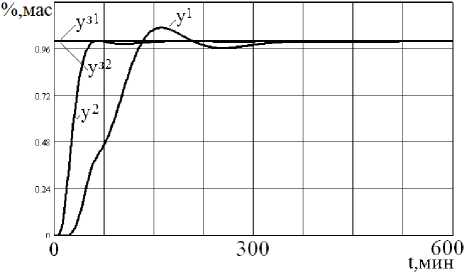
Рисунок 5. Динамические характеристики системы в приращениях при номинальном состоянии объекта
Figure 5. The dynamic characteristics of the system in increments at the object nominal state
Как указывалось выше с течением времени, возможно, изменение как параметров моделей каналов, так и транспортного запаздывания. Однако изменение транспортного запаздывания по любому из четырёх каналов объекта приводит к изменению структуры коэффициентов характеристического полинома и к изменению размерности матрицы в пространстве состояния.
Для доказательства работоспособности алгоритма рассмотрим случай увеличения транспортного запаздывания по всем каналам объекта одновременно. Такая ситуация может быть обусловлена образованием полимера и ухудшением теплообмена в кипятильниках, конденсаторах, забивкой микропримесями и полимером клапанов тарелок колонны и другими причинами [2, 3], что неизбежно приводит к увеличению транспортных запаздываний (таблица 1) по каналам объекта ( d 1,1 = 56, d 1,2 = 12, d 2,1 = 41, d 2,2 = 6 ). В этом случае полиномы примут вид:
B* , 1 (z) = b 66 z 6 + b 65 z 6 + b 64 z 6 + b 63 z 6 + + b 62Z66 + b 6^ 6 + b -2 z 60 + b 63 z -5 + b ^ + + b 30z -57 + b 29z -56 + b 28z -55 + b 27z -54 + b 26z -53 , 1 , 1 -66 -65 -64 -63
A C (z) = a 66 z + a 65 z + a 64 z + a 63 z +
+a,,z-"+ a z 61 + a z 60 + a,0z59 + a,„z58 + 62 61 60 5958
57 56 55 5453
+a, 7z + a, ,z + a, z + a, .z + a, ,z + 57 56 55 5453
+a,, zn + a, z10 + a0 z-9 + a8 z8 + a7 z- + a,, z-6 + 11 10 9 8 76
+ a 5z -5 + a 4z -4 + a 3z -3 + a 2z -2 + a 1z -1 -1.
Изменение числа коэффициентов, повлечёт изменение как их структуры, так и размерности матрицы А . Вычисляя собственные значения, покажем корни на комплексной плоскости:
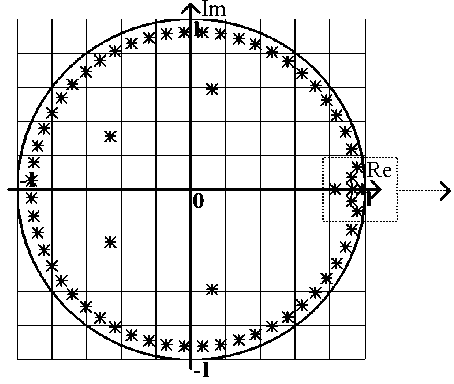
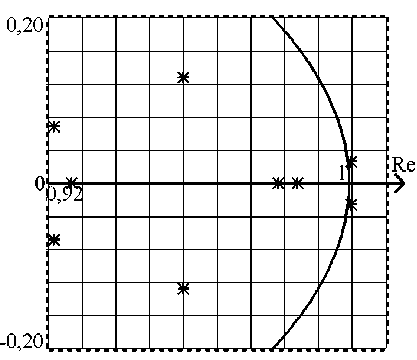
Рисунок 6. Расположение корней характеристического уравнения
-
Figure 6. Characteristic equation roots location
Увеличение инерционности по каналам объекта приводит к увеличению числа корней характеристического многочлена системы, росту их величин | 2 max | = 1,00093 > 1 и, как следствие, к неустойчивой работе системы, это подтверждается динамическими характеристиками, полученными при моделировании.
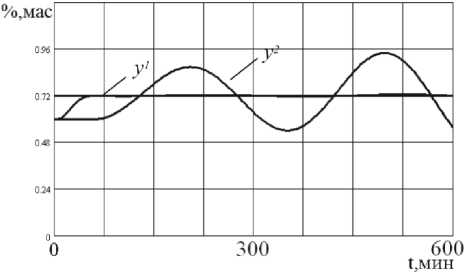
Рисунок 7. Динамические характеристики системы при увеличении транспортного запаздывания
-
Figure 7. The dynamic characteristics of the system in increments within increasing transport lag
Для оценки запаса устойчивости цифровой многосвязной системы в работе предложено использовать минимальное отклонение от границы устойчивости:
П = * — V L mxx\ , где η – запас устойчивости.
Заключение
Рассмотренный подход к оценке устойчивости многосвязной системы регулирования может быть эффективно использован в автоматизированном режиме при синтезе робастных систем управления многомерными технологическими объектами.
Список литературы Оценка устойчивости многосвязной цифровой системы управления процессом экстрактивной ректификации
- Улянов С. В. и др. Интеллектуальное робастное управление: технологии мягких вычислений. М.: ВНИИгеосистем, 2011. 406 с.
- Цыкунов А.М.Робастное управление с компенсацией возмущений. М.: Физматлит, 2012. 304 с.
- Цыкунов А.М.Робастное управление объектами с последействием. М.: Физматлит, 2014. 254 с.
- Бобцов А. А., Пыркин А. А. Адаптивное и робастное управление с компенсацией неопределенностей: учеб. пособие. СПб.: НИУ ИТМО, 2013. 135 с.
- Бобцов А. А. и др. Методы адаптивного и робастного управления нелинейными объектами в приборостроении: учеб. пособие для высших учебных заведений. СПб.: НИУ ИТМО, 2013. 277 c.
- Лежнина Ю. А. Робастное управление многосвязными объектами с запаздывающим аргументом//Приборы и системы. Управление, контроль, диагностика. 2011. №5. С. 12-16.
- Кудряшов В.С., Иванов А.В., Гайдин А.А. Расчёт и моделирование цифровой робастной системы регулирования связанного объекта//Математические методы в технике и технологиях: XXVI Международная науч. конф. ММТТ-26, Нижний Новгород: Нижегород. гос. техн. ун-т. 2013. Т. 1. С. 48-49.
- Гайдин А. А. Синтез цифровой робастной системы управления многосвязным нестационарным объектом (на примере процессов химической технологии): дис.... канд. техн. наук: 05.13.01, 05.13.06. Воронеж: ВГУИТ, 2013. 150 с.
