Оценка возмущений в минимаксном фильтре

Бесплатный доступ
В статье рассматривается поведение вектора состояния динамической системы при воздействии неизвестных постоянных возмущений. Выявляются особенности изменения вектора состояния, на основе которых строится адаптивная итерационная процедура.
Гарантированное оценивание, минимаксный фильтр, оценка возмущений
Короткий адрес: https://sciup.org/147154846
IDR: 147154846 | УДК: 681.2
Assessment of perturbation action in minimax filter
The article considers vector behaviour of dynamic system at uncertain time independent perturbation influence. Peculiar features of vector state changes, on the basis of which adaptive interaction procedure is performed, are revealed.
Текст краткого сообщения Оценка возмущений в минимаксном фильтре
Одна из важнейших задач при разработке сис-
2. При wk = 1,5 , к = 1,
...
, N наблюдается
тем автоматического управления – построение эффективных алгоритмов оценивания состояния системы [1]. Повысить эффективность этих алгоритмов можно за счет оценки возмущений, дейст-
схожая с первым случаем картина (рис. 6). При постоянных максимальных возмущениях, начиная со 2 шага, информационные множества стягиваются в точку.
вующих на систему, и построения адаптивного алгоритма [2]. Пусть процессы в системе управления описываются следующим образом:
x k + 1 = Ax k + rw k , У к + 1 = Gx k + 1 , x k e R n , (1) w k e W c R m ,k = 0 , 1 ,...,N -1.
Матрицы A , Г и G заданы следующим образом:
0,9976 0,04639 A =,
I -0,09278 0,8584
Г =
' 0,1189 - 10 -5
v 4,639 - 10 -2 .
, G = ( 1 0 )
Множества X 0 , W заданы следующим образом: X 0 = { x e R 2 |-7,5 - 10 -4 < x (1) < 7,5 - 10 -4 , -0,03 < x (2) < 0,03}, (3)
W ={ w e R |-1,5 < w < 1,5} . (4)
1. Особенности изменения вектора состояния
Рассмотрим разные варианты реализации возмущений.
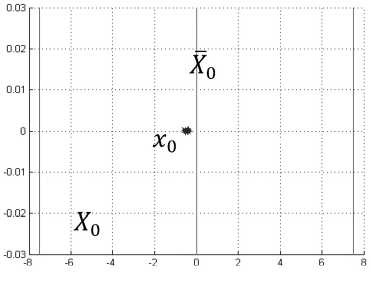
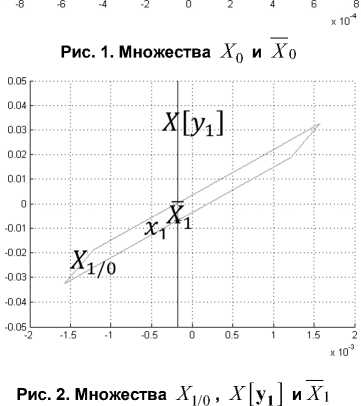
1. Пусть wk =- 1,5, k = 1,..., N . На рис. 1-5 изображены множества прогнозов Xk + 1/ k , множества, совместимые с измерениями X [ ук ] , информационные множества X к + 1 и истинные значения хк .
-
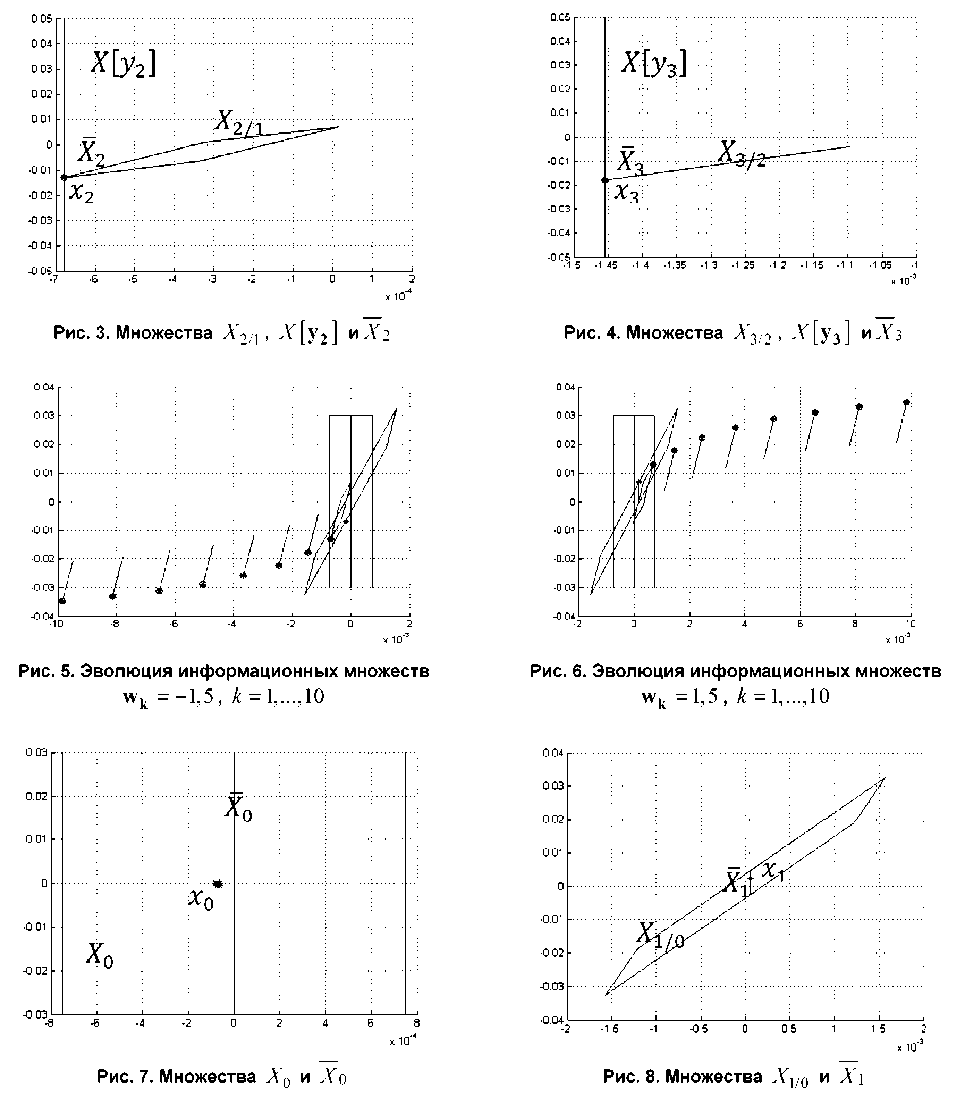
3. Рассмотрим случай, когда возмущения постоянны, но не максимальны: w k = 0,5, к = 1,..., N (рис. 7-11).
-
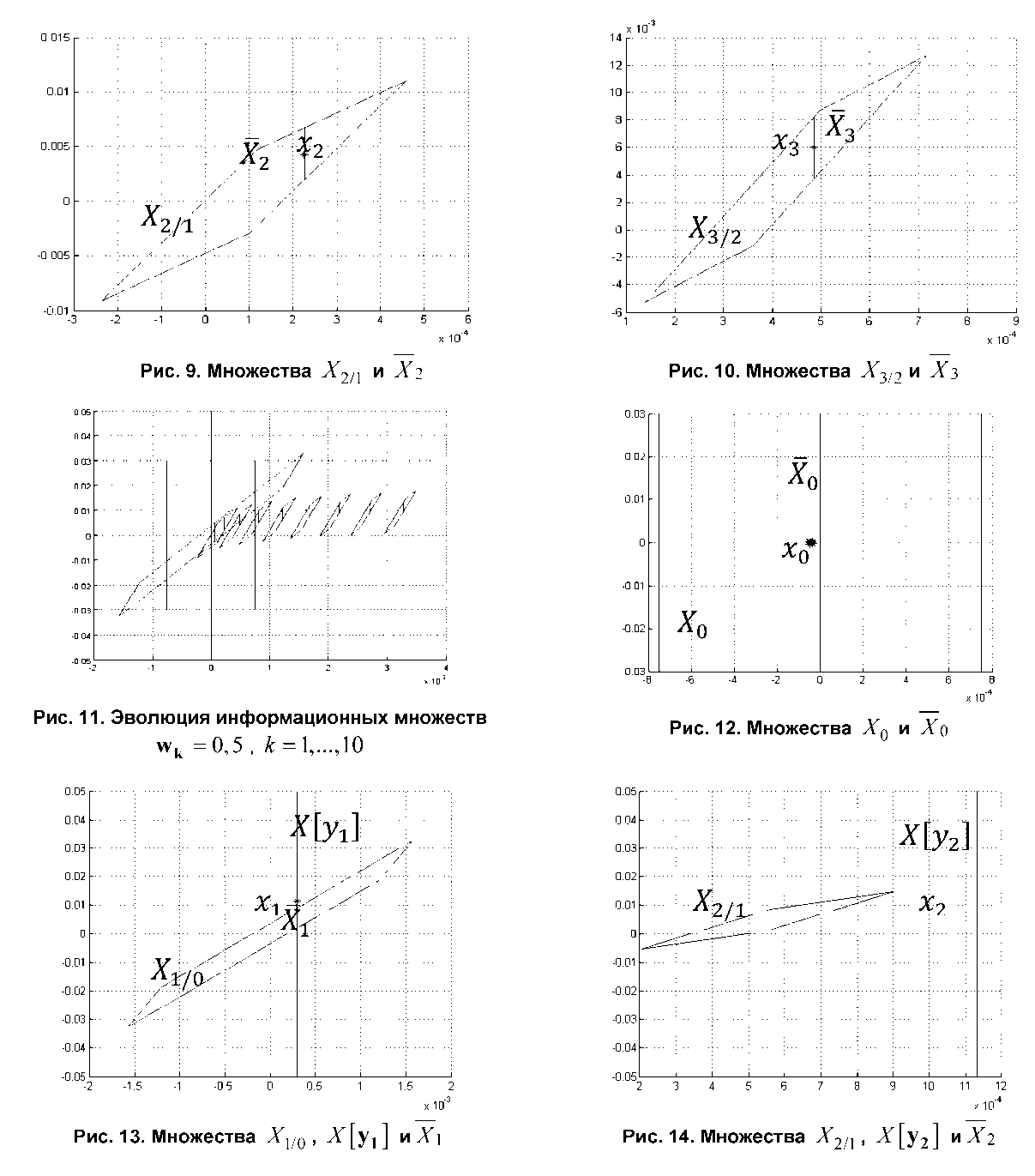
4. Рассмотри вариант, когда возмущение выходит за допустимое множество. Пусть множество W остается неизменным, но w k = 2,5, к = 1,..., N (рис. 12–14).
-
2. Адаптивная итерационная процедура
При постоянных не максимальных возмущениях информационные множества до 10 шага не стягиваются в точку, но размер множеств постепенно уменьшается.
Уже на первом шаге истинное значение не попадает во множество прогнозов и информационное множество. На втором шаге истинное значение также не попадает во множество прогнозов и пересечение множества прогнозов с множеством, совместимым с измерениями, получается пустым.
Пусть нам известно, что возмущения являются постоянными, но истинное значение возмущения не известно. Как видно из (1) и (2) при постоянных
Оценка возмущений в минимаксном фильтре
максимальных возмущениях, начиная со 2 шага, информационные множества стягиваются в точку. Также из (3) видно, что в случае, когда значение возмущения выходит за границы заданного множества, на 2 шаге пересечение множества прогнозов и множества, совместимого с измерениями , является пустым. Таким образом, при данных начальных условиях (2)-(4) за 2 шага можно определить какое возмущение реализовалось: из множества, с границы множества или не из множества.
Построим итерационную процедуру, которая каждые 2 шага уменьшает множество возмущений на dw (Wi+2 = Wi - dw), пока информационное множество не стянется в точку. Если на очередном n шаге пересечение множества прогнозов и множества, совместимого с измерениями, является пустым, то необходимо вернуться на 2 шага назад и пересчитать полученные множества, начиная с п-2 шага. Этот случай соответствует тому, когда истинное значение возмущения принадлежит разности множеств wn е Wn - Wn_2. При этом если точность оценки множества dw достаточная, то в дальнейшем принимаем множество Wi = Wn_2. Если же необходимо более точно оценить множество Wi, то, начиная с n-2 шага, продолжаем выполнять процедуру, при этом
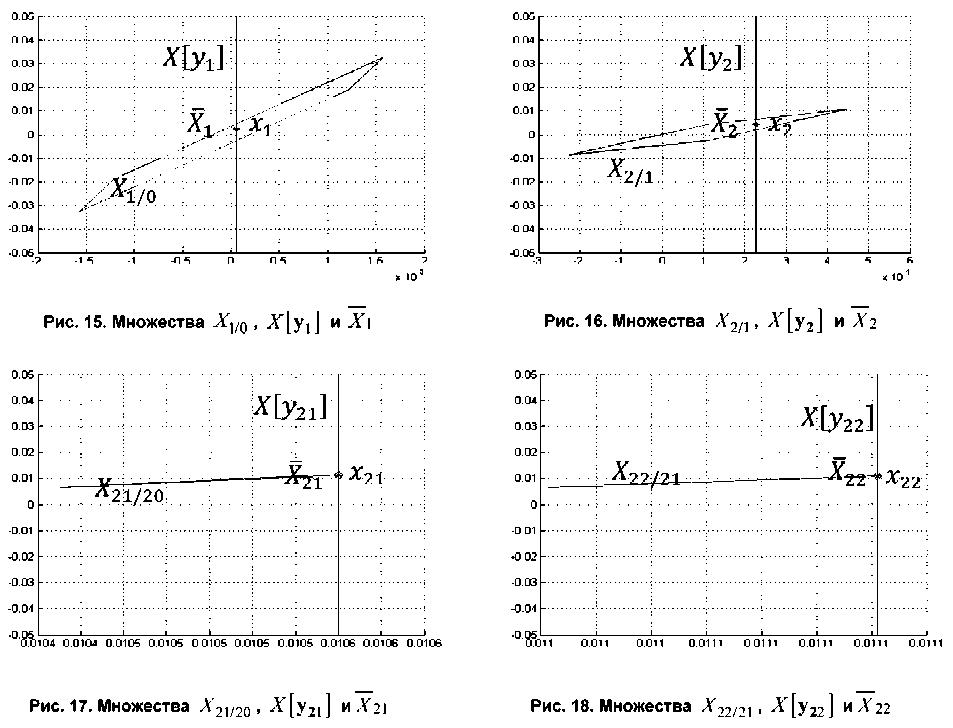
уменьшив dw . Рассмотрим случай, когда dw = 0,1 и wi = 0,5 (рис. 15–18).
Заключение
Таким образом, с помощью данной процедуры за 21 шаг, постепенно уменьшая множество W , удалось сжать информационное множество в точку и тем самым повысить точность оценки состояния динамической системы. Можно обобщить данную процедуру для других реализаций, для этого требуется правильно подобрать значения k – число шагов, за которое можно распознать принадлежит ли возмущение границе множества, – а также определить, что возмущение реализуется извне множества и dw .
Список литературы Оценка возмущений в минимаксном фильтре
- Оценивание состояния динамической системы в условиях неопределенности/В.И. Ширяев, В.И. Долбенков, Е.Д. Ильин, Е.О. Подивилова//Экстремальная робототехника: труды международной научно-технической конференции. -СПб.: Изд-во «Политехника-сервис», 2011. -C. 204-214. -1 эл. опт. диск (CD-ROM).
- Ширяев, В.И. Об алгоритмах «сжатия» и «растяжения» множеств в задаче адаптивной минимаксно-стохастической фильтрации/В.И. Ширяев, Н.Б. Сидорова, Е.Ю. Юферова//Программное обеспечение. Микропроцессорная техника сложных автоматических систем и их устройства: темат. сб. науч. тр. -Челябинск: ЧГТУ, 1995. -С. 104-109.
