Онтология дуализма безопасности технической системы

Автор: Лобач Д.И.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Общие вопросы формализации проектирования: онтологические аспекты и когнитивное моделирование
Статья в выпуске: 3 (57) т.15, 2025 года.
Бесплатный доступ
Задача исследования – структурировать аспекты управления и безопасности технической системы с применением понятий энтропия, негэнтропия и информация для возможности получить дополнительные факторы оценки контроля и потери управления при принятии управляющих решений или утраты эмерджентности. Рассмотрен анализ некоторых свойств эргатических систем, которые формируют информационное поле описания структуры, управления и уровня безопасности технических систем. Построена двухуровневая структура онтологии для оценки управления технической системы путѐм рассмотрения информационных свойств. Негэнтропия характеризует состояние технической системы при сочетании влияния на функционал внутренних свойств и внешних факторов. Количество систем безопасности формирует предельные уровни и возможности управления и обеспечения безопасности в технической системе, в т.ч. при проявлении эмерджентности. Дуализм безопасности заключается в определении как негэнтропии (характеристики состояния порядка в системе, фактического (наихудшего) уровня и структуры управления и безопасности), так и информации о состоянии управления и безопасности (по величине необходимого количества систем безопасности в проекте для достижения наилучших возможностей). Проведено сопоставление некоторых понятий и закономерностей из теории информации и термодинамики для применения их в онтологии дуализма безопасности. Анализ дуализма безопасности позволяет для проектов технических систем проводить сравнение структуры и комплексов управления, их потенциальных возможностей; определение факторов успешного контроля или потери управления, условий утраты эмерджентности; экспертные оценки систем коммуникаций, управления и связи; формировать режимы оптимального управления оборудованием и обеспечения безопасности с учѐтом потери ресурсов и/или необходимости их пополнения.
Онтология, негэнтропия, дуализм, безопасность, техническая система, кибернетика, сэйфеометрика, потеря управления, эмерджентность
Короткий адрес: https://sciup.org/170209529
IDR: 170209529 | УДК: 338.3:621.391:[004.5] | DOI: 10.18287/2223-9537-2025-15-3-309-323
An ontological model of the dual nature of safety in technical systems
The aim of this study is to structure the aspects of control and safety in technical systems using the concepts of entropy, negentropy, and information, in order to identify additional factors for assessing controllability and loss of control in the process of decision-making or the loss of emergence. The article examines specific properties of ergatic systems that contribute to forming the informational basis for describing the structure, control, and safety levels of technical systems. A two-level ontological framework is proposed for evaluating the controllability of a technical system through the analysis of its informational characteristics. Negentropy is interpreted as an indicator of the system’s condition, reflecting the combined effect of internal properties and external influences on its functionality. The configuration and number of safety subsystems define the upper limits of controllability and safety within a technical system, including in scenarios involving emergence. The dualism of safety lies in capturing both the negentropy (describing the state of order in the system, as well as its actual — or worst-case — levels and structure of control and safety) and the information about the state of control and safety (expressed through the required number and configuration of safety subsystems needed to achieve optimal performance). The article compares several concepts and regularities from information theory and thermodynamics for their applicability within the ontological framework of safety dualism. The analysis of safety dualism enables the comparison of structural and control architectures in technical system designs, the identification of factors contributing to successful or failed control, the definition of conditions under which emergence is lost, expert assessment of communication and control systems, and the development of optimal control and safety regimes—taking into account both resource depletion and the need for resource replenishment.
Текст научной статьи Онтология дуализма безопасности технической системы
Для прикладных проблем не всегда имеется подходящая теория их описания, в области развития техники практика зачастую её опережает [1]. Рассмотрение свойств технических систем (ТС) осуществляется на основании присущих им наиболее общих, признаков и описаний, которые формализованы (см., например, [2-4]). В ходе исследований по расширению подходов и развитию дополнительных инструментов для оценки возможностей проектов ТС можно выделить полезные для экспертной деятельности темы с содержательной информацией для анализа их функционала, включая области обеспечения безопасности, контроля и управления [4-6]. Развитие теории ТС осуществляется с целью привести существующие знания по объекту исследования от исходного состояния к их новому пониманию и использова- нию для других явлений и подходов, т.е. изучать природу явлений в русле Сенеки [7]: «Если не можешь изменить мир, измени отношение к этому миру».
-
1 Основные понятия
С точки зрения описания взаимодействия различных объектов в ТС (элементов, структуры (систем) и сигналов - ЭСС), можно рассмотреть возможности применения её параметров для внутреннего структурирования, системообразования в контексте энтропии ТС. Характеристики систем в разных областях науки первоначально рассматриваются гипотетически и обычно подтверждаются косвенно. С учётом развития знаний об энтропии получены выражения для этой величины первоначально от предположений Больцмана
S = к х logP , (1) где S - термодинамическая энтропия по Клаузиусу, к - постоянная Больцмана, P - число равновероятных микросостояний термодинамической системы; до выводов из теории информации по Шеннону (как информационная энтропия); по Хартли
H = K х log 2 N , (2) где H - мера Хартли для равновероятных состояний, K - количество символов в сообщении, N - количество символов в используемом алфавите; по Колмогорову (скорость потери информации) и др. [8].
Под энтропией понимают меру беспорядка в системе (из-за неопределённости состояния) [8-11]. Описание уровня формирования структурности и взаимодействия в системе (негэнтропию) с позиций предотвращения наихудших последствий использования ТС можно рассматривать как меру предусмотрительности от незнания структуры или неблагоприятных ситуаций. Особенностью ТС является то, что в ТС имеются сигналы управления и контроля своих параметров. ТС является активным объектом, содержит в себе ЭСС. Рост числа рабочих систем (РС) в ТС может привести к повышению случаев потери управления (ПУ), как проявлению неопределённости, беспорядка (энтропии), утраты приобретённых свойств управления (эмерджентности). Выставляемый в ходе управления уровень функциональной (проектной) готовности (как результат, итог оценки, вывод или совокупность аналитических данных и информация об этом) связан с уровнем безопасности в ТС (верхняя граница уровня безопасности - наилучший показатель для проекта ТС, который оценивается по числу систем безопасности) и покажет, какой отклик ТС может предоставить (показать, отреагировать и т.п.) для реального (или гипотетического) состояния. Для этого ТС оснащается системами безопасности (СБ). Чем выше проектный уровень безопасности надо обеспечить в ТС (в относительных единицах), тем к большему незнанию внутренних связей следует быть готовым. Априорная готовность будет обеспечиваться большим количеством СБ в проекте ТС.
Можно предположить, что энтропия и негэнтропия ТС характеризуют уровень управления ТС, его структуру. Если необходимо обеспечить более высокий уровень безопасности, то это значит, что в системе имеется большой хаос, например, в ЭСС, высокий риск неисправностей, ПУ, аварий. Когда в ТС уровень безопасности является низким - это значит, что в ТС мало неблагоприятных рисков, система проста и малохаотична (по свойствам). Управление ТС понижает уровень хаоса (энтропию). Изменение состояний в такой ТС не случайное, а управляемое между фактической и максимальной границами безопасности и проявляется как её дуализм . Проектная готовность к ПУ и фактическая безопасность формируют двойственность в понимании безопасности ТС. Можно рассмотреть проявление дуализма безопасности, как характеристики всесторонней энтропии ТС со свойствами управления.
ТС, в контексте рассмотрения состояний [1-6], может иметь разные связи и систему управления, характеристики технического и человеческого потенциала эргатической систе- мы (ЭС). Внутреннее состояние соответствует возможностям ТС с определённым уровнем безопасности. При росте энтропии в системе увеличивается вероятность принятия неправильного управленческого решения. Негэнтропия и информация о ТС связаны между собой [12]. Главная задача исследования по гносеологическому принципу А.Н. Колмогорова -определить возможную корреляцию математическим соотношением [13], которая проявляется как тенденция к поискам более простых решений для анализа.
Под информацией традиционно понимаются сведения о системе, а в кибернетике - данные или сообщение для управления системой, связанные с сигналами [14]. Безопасность обычно представлена информацией о системе через отношения и взаимодействия с окружающими объектами и средой. Это соответствует определению информации [15]: «Информация - снятая неопределённость наших знаний о чём-то».
Неочевидна тенденция изменения энтропии ТС, как меры беспорядка, для безопасности. В ходе использования аналитических подходов и методик, аналогий в научном исследовании нарабатывается информация, экспериментальные и эксплуатационные данные для оценки надёжности ТС, рисков проектных и запроектных аварий оборудования для достоверной оценки безопасности инновационных технологий в конструкциях [16-19].
-
2 Методология
При сравнении проектов для определения уровня превосходства одних проектов над другими важно использовать данные, которые могут представить комплексный экспертный анализ ТС, чтобы оценить, например, степень опасности, уровень оснащённости СБ, степень автономности, характеристики уровня управления, автоматизации процессов, участия в них людей, степень изолированности (от доступа людей, от окружающей среды и т.п.) и пр. Ряд параметров являются величинами из описания проекта, например, количество РС (или элементов), количество СБ (или элементов), технические характеристики и т.п.
Для подготовки анализа требуется структурирование свойств ТС с учётом выявлением или новых особенностей, синергии, сверхаддитивности, эмерджентности в функционале ТС и т.п. Рассмотрение объекта в таком контексте позволяет проводить параметризацию характеристик для оценки, построение кластеров по выбранным направлениям, выявлять фрактальные особенности, строить древовидные иерархические структуры, что даёт возможность выработать общие тематические рекомендации, используя принцип модульности [1-6, 8]. Применение в экспертных подходах совокупности признаков и потенциалов ТС даёт возможность использовать параметризацию для анализа в контексте функциональноориентированного представления. При наличии нескольких аспектов рассмотрения целесообразно упрощать используемые подходы, начиная с однокомпонентных, и переходить к многоуровневым зависимостям, а анализ влияния внутренних и внешних факторов проводить независимо друг от друга [4].
Для анализа жизненного цикла (ЖЦ) ТС целесообразно выделить его подциклы, например, ЖЦ потребностей ТС (в снабжении, ресурсах), ЖЦ параметров и потенциалов ТС, ЖЦ влияния внутренних и внешних факторов, ЖЦ контроля и управления ТС, ЖЦ технического обеспечения (деградация и старение оборудования).
РС понижает безопасность, а СБ работает для стабилизации и повышения безопасности. Назначение РС - проявление и использование функциональности ТС (увеличение единиц продукции, выполнение большего количества операций, повышение и достижение проектом ТС технологических режимов и т.п.). Назначение СБ - управление ТС, ограничение эксплуатационных характеристик в пределах проектных характеристик. Использование СБ, приведение ТС в безопасное состояние усложняет управление, повышает комплексность действий и хаос сигналов и связи. Повышением уровня безопасности с увеличением числа СБ при передаче энергии для переходов в замкнутой (адиабатической) системе в ходе управления создаются условия для перевода ТС в первичное состояние (проявление обратимости).
Рассмотрение связи управления с уровнем безопасности ТС [16] и энтропией, негэнтро-пией и информацией в системе создаёт предпосылку выдвинуть гипотезу, что эти характеристики находятся в количественной зависимости. Необходимо выявлять и пояснять свойства и закономерности описания энтропии ТС, т.е. (по Пуанкаре) рассмотреть как величину, имеющую физический смысл [9, 20]. Уровень оценённой безопасности [18] должен предположительно коррелировать с негэнтропией ( Q ), которая может показывать уровень контроля в системе [11, 12]. Одновременно уровень безопасности может содержать информацию об ограничении энтропии в ТС. Такая двойственность оценки уровня безопасности для ТС формирует концепцию дуализма безопасности , структура которого представлена в таблице 1.
Таблица 1 - Структура онтологии дуализма безопасности технической системы
|
Качества ТС, эффекты влияния |
ТС – управляемая система |
||
|
негэнтропия |
информация |
энтропия |
|
|
количественная оценка |
по РС |
об исправных СБ |
неисправных РС и СБ |
|
уровень безопасности |
нижняя граница для ТС |
верхняя граница для ТС |
не характеризует |
|
уровень управления |
определяет текущее состояние (возможность) |
определяет потенциал (наилучшие возможности) |
общая потеря и утрата возможностей |
|
потеря управления |
характеризует |
характеризует |
не характеризует |
|
усиление свойств управления |
не характеризует |
характеризует |
не характеризует |
|
ослабление свойств управления |
характеризует |
характеризует |
не характеризует |
|
запас безопасности |
характеризует |
характеризует |
не характеризует |
|
недостаток безопасности |
характеризует |
характеризует |
не характеризует |
|
профессионализм персонала |
характеризует |
характеризует |
не характеризует |
|
ущерб |
не характеризует |
не характеризует |
характеризует |
|
для принятия решения |
важно |
важно |
вводит в заблуждение |
|
для рекомендаций, вывода |
использовать |
использовать |
не использовать |
Предположительно канонический (как в термодинамике [21]) эффект хаоса в контексте потери функциональности ТС близок к пониманию о нанесении системе ущерба [22, 23].
-
3 Информационная структура безопасности технической системы
При отсутствии СБ или при малом их количестве информацию об уровне безопасности, энтропии и негэнтропии нельзя точно оценить (показано в рамках сэйфеометрики, поскольку возможности ТС могут быть не представлены или не соответствовать ожиданиям) [16, 17].
Количество элементов в ТС дискретно, с дополнением каждого нового элемента свойства ТС изменяются - осуществляется новая функция или выполняется работа с другим действием происходит приспосабливание к усилению внешних условий. В состоянии детерминированности уровень безопасности с конечным количеством РС и СБ (т.е. имеется фиксированное число состояний) Q 1 зависит только от уровня безопасности, достигнутого в предыдущем состоянии Q 0 (свойство Маркова) [24-26]. Получение информации от ТС влияет на последующее действие и состояние, формирует уровень безопасности в ТС. Характеристики комплекса РС-СБ и информационные данные о ТС создают внутренний поток сведений [3, 16].
В [16] приведено выражение зависимости Q(NСБ) с модельными условиями. Для задачи об оценке состояния безопасности получена функция Q(NСБ)=a+ахln(NСБ) , где a - коэффициент интегрирования (для упрощения анализа a=0); потенциал, характеризующий ТС а=NСБ/MФ - степень опасности; NСБ - количество СБ в ТС; MФ -количество проектных или запроектных факторов опасности для этой ТС. Гипотеза уравнения идеального со- стояния ТС (ГУИ) [18] рассматривается в виде: QхNРС ^ Q(NРС)=b/NРС , где b - коэффициент свойств ТС; NРС -количество РС.
Значение Q ( N РС)= Q R для количества N РС характеризует структурность ТС вследствие формируемого (реального) уровня безопасности, т.е. эту величину можно рассматривать как негэнтропию . Величину Q ( N СБ) можно считать предельной для ТС с числом СБ N СБ : Q ( N СБ)= Q lim . Самой простой ТС можно считать систему с одной СБ [16]. По Хартли (2) один символ N =1 соответствует H =0, т.е. нет информации о системе (не работает). В случае СБ это соответствует состоянию, когда СБ не работает - выключение системы, что можно сопоставить с передачей информации об уровне безопасности ТС.
Пусть взаимное влияние N Р С и N С Б друг на друга при совместном их функционировании ограничивается только уменьшением предельного значения Q iim на величину Q r : Q у = QU m - Q r . Формализация оценки Q iim и Q r произведена в [16, 18]. Результирующее значение Q у показано на рисунке 1 вместе с QHm и Q r .
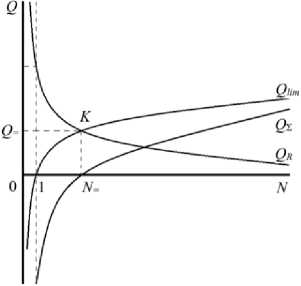
Рисунок 1 - Схематичные зависимости Q lim , Q R и Q у (пояснения в тексте)
Проектный уровень безопасности ТС должен достигаться только в случае, когда QR
Пусть есть ТС с возможностью изменения количества СБ N СБ : A ={ N СБ 0, N СБ 1,.., N СБ i }, где i =0.. I , N СБ i = i . Пусть вероятность изменения РС и (или) СБ для достижения состояния ТС с безопасностью Q ( NСБi ) равна 1. Использование N СБ, i СБ соответствует состоянию с уровнем безопасности Q ( N СБ 1)=ах ln ( NСБi ). В условиях постоянного внешнего воздействия фактора M Ф = const и M Ф = M , а= I / M = const ^ Q ( N СБ 1)= Q ( i )=ах ln ( i ) :
Q =ах ln ( i ). (3)
Это выражение, с учётом вариантов возможного понимания и общих выводов об информационной энтропии по Шеннону и по Хартли [8, 27], можно сопоставить с информацией о безопасности (мерой информации о безопасности, ИБ) для проекта ТС при а= const .
Для случая, если а^ const в ходе изменения ТС (при модификации или модернизации), при количестве СБ N СБ i = i , то а= i / M . Информацию об изменении уровня безопасности ТС для контроля и управления можно представить как: Q ( N СБ i )=ах ln ( i )= ln ( i а ) = In ( i(1 / M) ). Можно полагать, что полученное выражение является общим видом ИБ. При изменении проекта ТС (а^ const ), если M Ф =1 ^ ИБ Q ( N СБ 1)= Q ( i )= ln ( i ) :
Q = i х ln ( i ). (4)
Состояние ТС, когда Q (NСБ1)=0, связано с достижением нейтральной безопасности, когда функционирование ТС может прекратиться без воздействия специально предназначенных для этого систем. Это может характеризовать ТС с а=const и а^const. Можно полагать, что работа этой ТС не причиняет вреда окружающей среде, инфраструктуре или людям. Для формулы Хартли (2) это эквивалентно невозможности передачи информации, если алфавит содержит только один символ.
Пусть MФ=MН для Q (1)=0, а это состояние может различаться для разных MФ, то ТС может находиться в двух состояниях управления: с Q(i)<0 и Q(i)>0. При MФ>MН требуются дополнительные СБ при переходе ТС в нейтральное состояние для прекращения функционирования. С учётом этого, понимания безопасного состояния для разных ТС при разных внеш- них условиях различаются (формально зависят от величины MН). Однако ИБ зависит от детализации рассмотрения ТС - чем больше элементов NСБ i, тем больше требуется усилий для согласования и синхронизации информации при поддержании высокого уровня контроля и управления ТС. Пространственно-временные масштабы ТС не определяют однозначно уровень безопасности и ИБ ТС. Размеры систем и время для передачи сигнала в ходе связи могут быть большими, и управление ТС не будет осуществляться оперативно (требуется время на взаимодействие между ЭСС, РС и/или СБ). Величина Q (i) для любых ТС зависит только от текущего значения i, если MФ=1. При MФ
Минимум хаоса предполагает нулевой уровень безопасности в ТС, тогда принимать меры для её обеспечения не требуется. Большее количество элементов ТС содержится в системе с большим числом связей, где необходимо обеспечить управление с повышенным риском отказов, отклонений, поломок и аварий. Максимум контролируемой безопасности при повышении количества РС достигается только при росте числа СБ. Эта величина определяется предельными энергетическими ресурсами или финансовым обеспечением проекта.
Структуру ТС можно рассмотреть с позиции аналога парадокса Гиббса [9] - повышение энтропии ТС при увеличении количества РС и СБ при одних и тех же внешних условиях и росте сигналов управления и связи. В ТС происходит формирование структуры ЭСС - образование связей между независимыми, пространственно или временно распределёнными элементами, находящимися при одинаковых внешних условиях . В этой ситуации управлению требуется готовность к увеличивающемуся уровню рассогласования, нарушения синфазно-сти и синхронизации ЭСС, поэтому уровень безопасности, обеспечиваемый СБ, должен повышаться быстрее, чем падение негэнтропии, вызванное ростом количества РС . Задача СБ - повысить согласованность в структуре ТС. Это может происходить только в системах с наличием управления, где могут производиться действия по упорядочиванию, а не по повышению хаоса (как, например, в космологических, биологических системах и т.п., со статистической природой связей). Графики на рисунке 1 с учётом ГУИ показывают возрастание результирующих функций управления и контроля, т.е. для Q lim и Q ^ .
Количество СБ определяет неизвестную информацию об обеспечении сохранности РС, уязвимости ТС. С учётом этого можно сформулировать условия для устойчивого функционирования ТС. С ростом Q lim в системе возрастает запас безопасности (ЗБ). Для замкнутой системы с ростом ИБ в ней уменьшается количество возможных случаев неустойчивого управления, повышается уровень контроля над ЭСС. Таким образом, условие устойчивости ТС по аналогии с принципом Ле-Шателье-Брауна [3, 9]: состояние ТС более устойчиво, если ИБ максимальна . Внешние воздействия на ТС будут вызывать перераспределение внутренних ресурсов. Это аналогично правилу Ленца для самоиндукции о направлении индукционного тока в контуре (в данном случае речь идёт о компенсации внешнего воздействия с использованием внутренних ресурсов) [21].
-
4 Влияние внешних условий на состояние технической системы
Гипотетические случаи для изменений QR (внутренние условия) и M (внешние условия) состояний ТС (переходов), возможные их практические ситуации с использованием диаграмм управления состояниями показаны на рисунке 2. Из ГУИ ТС в контексте сэйфеомет-рики QR /M=const. Можно предположить, что в замкнутой системе внутренние возможности должны перераспределяться для работы при изменении внешних воздействий. Для двух со- стояний M0
Схема переходов состояний ТС показана на рисунке 2. В точке А ТС использует максимальное предоставленное количество РС и СБ, чтобы отметить ЗБ и недостаток безопасности (НБ) для ТС (на рисунке 2 сплошная линия - обратимые переходы без влияния связей между элементами ТС, пунктир - с влиянием связей; С и B - промежуточные состояния на кривых с ЗБ и НБ соответственно):
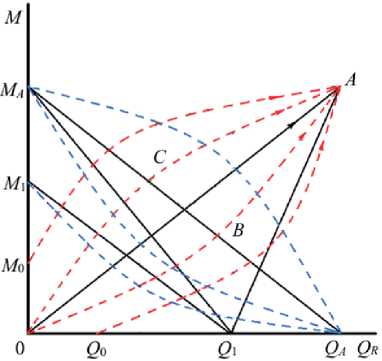
Рисунок 2 - Схематичные зависимости для отдельных переходов состояний ТС при управлении (пояснения в тексте)
-
■ {0- А } - переход в соответствии с ГУИ
( Q R / M = const );
-
■ {0- С - А } и { М 0- А } - из состояния с ЗБ (с потенциа
лом резервирования и дублирования), если М 0 ^0, есть запас ресурсов и средств, для больших М 0 ТС более аварийно-устойчива (способна преодолевать худшие внешние условия);
-
■ {0- B - А } и { Q 0- А } - в ТС есть НБ, возможны про
ектные недоработки (старт от Q0^0), требуется приработка и т.п., при больших Q 0 ТС менее готова к пуску, небезопасна.
Циклическая работа ТС возможна с проявлением обратимости или необратимости пере- ходов состояний ТС. Случаи обратимости рассматриваются по аналогии с циклом Карно [21]. Эти переходы характерны для ТС, осуществляющих функциональность только на внутренних запасах без отбора ресурсов. При сохранности ЭСС состояние ТС не ухудшается. Ес- ли в ходе работы эксплуатационные возможности устойчивости улучшаются, то повышается ЗБ, есть внешнее поступление ресурсов. При использовании резервов очевидна возможность полной обратимости с улучшением конечного состояния ТС. К условиям необратимости переходов в ТС можно отнести следующие: утечки ресурсов и средств, утрата работоспособности, снижение эффективности и (или) КПД, старение и (или) рабочая деградация оборудова- ния, деградация при хранении и ожидании использования по назначению, ПУ, утрата связи и коммуникаций. В реальных ТС всегда есть необратимые переходы и потеря рабочего потенциала, снижение надёжности и живучести, происходит разрушение ЭСС (график для реального перехода при M=0 не от QR=0, а от QR=Q 0 с начальным отбором ресурсов). Необратимость переходов повышается при работе с нарастающим воздействием внешних условий, увеличением M. Обратимость и необратимость влияют на эффективность работы ТС в диапазоне изменений внешних условий в пределах внутренних запасов и возможностей. Необратимые переходы ({ Qa - МА}, {Q1-МА}, {Q1- М1}) указаны на рисунке 2: сплошная линия - без влияния связей между элементами ТС, пунктир - с влиянием связей.
Увеличение по Q R показывает переходы без ПУ, например, {0- А }, {0- C - А }, {0- B - А }. Переходы с уменьшением Q R будут характерны для случаев с ПУ, например, { Q a - М А }. Эффективность работы с имеющимся ЗБ можно оценить через соотношение М 1 / МА (достигнутого значения к максимально возможному числу факторов), а эффективность управления - с использованием Q 1/ QА (минимальной величины к максимально возможному значению параметра). Изменение состояний ТС с Q R = const возможны с изменением Q R / M . Переходы при M = const возможны по разным причинам, и их целесообразно рассматривать с учётом корреляций согласно ГУИ.
Переходы состояний в треугольнике Л{0- А - МА } происходят в условиях щадящей эксплуатации или ЗБ, старт из состояния с М ^0 возможен, если в ТС создан ЗБ для преодоления A M . Для ТС в А{0- А - QА } мало ресурсов и НБ, поэтому начало перехода из Q 0^0 все ресурсы эксплуатируются с наибольшим износом. При начале функционирования из области A{0- А - МА } обратный переход возможен в ту же область или в A{0- А - QА }.
Прямой переход может совершаться как из состояния с ЗБ, так и при НБ, восполняемом в ходе функционирования ТС. Этот переход осуществляется под управлением и контролем ЭСС ТС. НБ может быть связан с недоработками проекта, приработкой, согласованием элементов, наладкой. Обратный переход обычно происходит самопроизвольно (под действием активных СБ) или при изменении режимов работы ТС. В ходе возврата возможности ТС могут ухудшаться (элементы выходят из строя - деградируют, стареют, ломаются и т.п.).
Основная причина необратимости переходов в ТС - это утрата системой своей проектной функциональности из-за выработки ресурса, ПУ, израсходования средств (материалов, финансов, энергии и пр.). Неисправность СБ и ПУ приводят к информации, обусловленной многочисленными беспорядочными и несогласованными взаимодействиями и сигналами между РС в ходе неуправляемой их работы. СБ обеспечивают упорядоченные, подконтрольные связи между РС. Необратимость, её факторы делают переходы ТС несимметричными. Характеристики ТС - комплексные признаки, поэтому может быть много факторов риска изменения состояний, утраты контроля и связи. Предположительно необратимость происходит из-за разделения затрат в ТС на материальные средства (носители оборудования) и на нематериальные (меры для поддержания контроля, связи, процесс передачи информации и др.), темпы расходования которых различаются. Нематериальные ресурсы диссипативны, исчерпываются, не запасаются, излучаются, рассеиваются и т.п., может происходить их отбор из ТС или сброс наружу. Условную «идеальность» и «неидеальность» проектов ТС можно связать с обратимостью или необратимостью состояний ТС, что определяется конструкцией систем (проектантами и изготовителем). Без использования компенсации затрат в ТС формируется необратимость состояний. Факторы обратимости состояний ТС - это благоприятные для функционирования условия. Для экспертного анализа важно изучение влияния на работу ТС факторов необратимости, необходимо дать выводы по их исключению, рекомендации для эксплуатации ТС с ними. Они характеризуют несовершенство ТС. Все реальные системы имеют необратимые состояния. Для обратимых переходов изменение ИБ не меняется |Д Q | =0, а для необратимых |Д Q | ^ 0. Численно эффект необратимости характеризует степень открытости или незамкнутости системы, уровень утечки ресурсов и средств, ПУ и потерю контроля, подходит для описания устойчивости ТС к внешним воздействиям и утрате внутреннего рабочего потенциала.
Поскольку уровень безопасности ТС определяется количеством как РС, так и СБ, то целесообразно рассматривать динамику ИБ (для формирования системы РС) и статическую ИБ (по ограничению безопасности при использовании СБ). Цикл переходов относительно статической ИБ обратим, поскольку определяет пределы функционирования проекта ТС. Динамика ИБ может показать необратимость переходов в ТС по естественным причинам (утрата РС, их износ, рассеяние и др.).
По прямому и обратному переходам можно оценить возможность эквивалентности состояний в ТС. Для осуществления в ТС прямого перехода требуется привлечение ресурсов и средств, а обратный переход показывает диссипацию накопленных ресурсов, наличие в ТС расходов и потерь на восстановление функциональности, управление, сложность контроля и управления.
ПУ понижает уровень безопасности. ЭС является детерминированной системой, поэтому для эволюции ТС по вопросам технического оснащения и управления можно рассмотреть свойство её обратимости. Его трактовка в контексте функционирования ТС с этим свойством:
Если в системе нет потери управления при сложной обстановке (т.е. при запроектных или аварийных параметрах), то в этой системе не будет потери управления в простых условиях (т.е. при проектных, докритических режимах) .
5 Применение онтологии дуализма безопасностидля анализа свойств технической системы
Сформулированные с помощью гипотезы о дуализме выводы базируются на сделанных допущениях. ТС представляет собой устройство, назначение которого определено проектом. Информацию, содержащую управляющее действие для ТС, следует относить к негэнтропии, которая формируется согласно принципу компенсации энтропии [3, 12].
Понятие о негэнтропии базируется на параметрах, требуемых для основного функционала ТС ( N РС и M) , и характеризует ПУ ТС с ростом энтропии при расширении ЭСС, проявлении эмерджентности. ИБ основана на данных о структуре и свойствах управления проектом, параметрах СБ (а и N СБ ), характеристиках о готовности и способности ТС поддерживать контроль и управление. Анализ негэнтропии и ИБ позволяет оценить готовность ТС к функционированию и её проектный предел уровня безопасности.
Понимание негэнтропии и ИБ ТС возможно лишь в рамках проекта ТС с детальным описанием её функционала. Максимальное значение Q ( I) целесообразно рассматривать при функционировании проекта ТС с заданными параметрами I , M Ф , M Н и др. Успешность управления определяется бóльшей возможностью контроля и бóльшим количеством управляемых состояний в ТС. На основании закона необходимого разнообразия (закон Эшби) [3]: для успешного управления количество СБ должно быть не меньше числа разнообразных РС ( N Св > N рС ). В этом случае количество подконтрольных состояний ТС с учётом предположений о независимости подсистем РС и СБ (рисунок 1) можно использовать для рассмотрения свойства аддитивности. Для работы ТС наблюдатель осуществляет управление проектом посредством N сб, а экспериментатор (тот, кто эксплуатирует ТС) работает с N РС . Количество СБ определяет границу предполагаемого изменения ИБ, число РС связано с фактическим значением негэнтропии. Анализ влияния структуры систем при рассмотрении задач эксплуатационной безопасности ТС важен, например, в авиации [24-26]. Сведения для управления ТС могут быть получены при снятии неопределённости в информации о ТС согласно закону возрастания эмерджентности [28].
Для оценки величины запаса ресурсов и средств в ТС можно применить понятие свободной энергии (по Гельмгольцу [9]), как характеристики внутреннего потенциала системы при работе в изоляции, и его уменьшение из-за затрат для поддержания функциональности.
Среди задач эксперта может быть необходимость оценки баланса безопасности, проведение анализа диаграмм переходов ТС. Эксперту надо учесть эти данные для формирования выводов и рекомендаций, решения ряда аналитических вопросов: как и когда это можно отследить среди массивов данных; как целесообразно распределить ресурсы ТС для переходов состояний; к чему надо готовиться в ходе эксплуатации ТС; в чём суть преобразований в ТС; какие показатели проекта могут быть достигнуты. Для получения ответов необходимо рассмотреть деградацию оборудования, ухудшение управления, причины увеличения отходов, сброс отработавшего или ремонт и восстановление оборудования, потери человеческих ресурсов ЭС. Для поддержания работы происходит плановая потеря ресурсов и средств, потенциала ТС. Требуется оценка адекватности затрат.
Если ТС меняет свои параметры в ходе эксплуатации, то и требования к безопасности тоже необходимо изменять. К контролируемым процессам можно отнести, например, управляемую, планируемую человеком эволюцию ТС. Неуправляемым процессом следует считать самопроизвольные, «слепые» изменения на неконтролируемых объектах, происходящие по законам природы. Обратимость происходит (парадокс Лошмидта [9]), если нет ПУ, нет неисправностей. Если есть потери, то ТС не восстанавливается полностью. При расширении размеров ТС ПУ в ней происходит из-за ослабевания связей между ЭСС, при сжатии ТС контроль может восстанавливаться. То же может происходить в ходе циклических переходов.
Предположение о воображаемом в термодинамике «демоне» Максвелла [9] может органично вписаться в анализе энтропии и негэнтропии ТС в качестве проявления ряда явлений: функция управления в ЭС, влияние человеческого фактора на принятие решения, возникно- вение ПУ в ТС. В результате изменяются состояния ТС, происходят переходы и требуемая для работы ТС корректировка. Изгнание «демона» - это переход к более совершенному управлению ТС, автоматизации, к обратимости переходов состояний ТС. Для этого можно обобщить факторы управления и их признаки (см. таблицу 2).
Таблица 2 - Факторы управления технической системой
|
Факторы |
Признаки факторов |
|
Повышение эффективности и возможностей управления |
системный эффект, синергия, сверхаддитивность, эмерджентность |
|
Запас безопасности |
дублирование, резервирование, замена, синхронизация, синфазность, многоканаль-ность, когеррированность, дальнодействие |
|
Недостаток безопасности |
наладка, настройка, приработка, согласование, несовместимость оборудования, односторонность сигналов, потеря управления |
|
Потеря управления |
поломка, деградация, старение, запроектные параметры, выработка ресурса, запаздывание сигнала, слабый сигнал, высокий шум, большие расстояния, протяжённость объектов, потеря отклика или двусторонности, нецелостность, прерывистость, отсутствие координации, диссипация, утрата эмерджентности |
В безопасности ТС можно рассмотреть новый контекст постулата Нернста (3-е начало термодинамики) [21]. При М^0 ^ Q^^0. Функция безопасности ТС требуется, только если М>0, поскольку тогда для её обеспечения нужен контроль, управление и соответствующее оборудование. Однако всё имеющееся в проекте ТС оснащение может не использоваться, если М изменяется в диапазоне ЛM. Поэтому при функционировании ТС можно рассматри- вать полноту использования ЗБ, т.е. какая часть потенциала ТС используется для преодоле- ния внешних условий ЛМ.
Например, если проектом предусмотрена работа ТС (см. гипотетический контур на рисунке 3: обратимый переход {12}, необратимый - {3-4}) с переходами в Л{1-4-2} или Л{1-3-2} (пунктир - переход с влиянием связей), то в ней есть ЗБ для функционирования в пределах [ M MIN ; M MAX ]. Фактическое изменение Л М находится в этом диапазоне для М при использовании ЗБ в проекте ТС, поэтому коэффициент эксплуатации (КЭ) можно оценить по п тс =Л М /( M MAX -M MIN ). Для сохранения в ТС эксплуатационных параметров более приемлемы меньшие значения η ТС . Если η ТС >1, то при функционировании ТС имеются аварийные признаки и условия (выход за проектные условия).
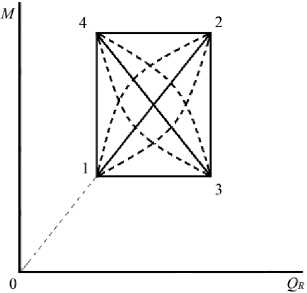
Рисунок 3 - Схема гипотетического контура для переходов состояний ТС при управлении (пояснения в тексте)
Энтропия управляемой системы, как мера информации о безопасности ТС, увеличивается с ростом числа связей и сигналов контроля. Безопасность неуправляемой ТС (негэнтропия) уменьшается из-за роста термодинамической энтропии для ЭСС в ТС. Обратимость возможна в пределах ограниченного времени. КЭ показывает долю обратимости. Для эксперта важно выделить влияние необратимости на функционал ТС. Чем меньше ηТС, тем перспективнее ТС, больше её потенциал и возможности. При больших КЭ повышается износ оборудования для функционирования с изменением параметров в широких пределах.
С учётом (3)-(4) при Qlim ^0 у эксперта будет полная информация о состоянии ТС и всех её элементов. При максимальных значениях Qlim или Qlim(а=const)^Qlim(а^const) (высокая энтропия сигналов и связей, их наибольшая хаотичность) практически невозможно зафикси- ровать конкретные состояния ТС и её элементов, требуются усилия в управлении системой, постоянное проведение синхронизации и согласования компонентов структуры, чтобы не потерять управление, т.е. может достигаться Qlim. ИБ и негэнтропия изменяются в противоположных направлениях, взаимоисключают друг друга - разрастание структуры понижает QR, что соответствует термодинамической концепции информации по Шеннону [15]. Сравнение состояний и выделение ключевых компонентов в онтологии рассматриваемого дуализма для ТС проведено в таблице 3, используя подходы научного познания [29].
Таблица 3 - Сопоставление ключевых компонентов в онтологии дуализма безопасности (пояснения в тексте)
|
Термодинамика |
Теория информации |
Дуализм безопасности |
|
|
Формирование функционалов ТС через количество РС |
Обеспечение безопасности ТС через количество СБ |
||
|
энтропия |
информация |
негэнтропия |
информация |
|
— |
информация |
информация об управлении |
информация о пределе безопасности |
|
S = k X logP |
— |
QR = b / N рс |
— |
|
— |
H = K X log 2 N |
— |
Q lim =аХ lnN СБ |
|
S |
H |
Q r |
Q lim |
|
k |
K |
— |
α |
|
P |
N |
N РС |
N СБ |
|
постулат Нернста |
— |
— |
применим |
|
свободная энергия |
— |
— |
запас безопасности |
|
необратимость процессов |
— |
недостаток безопасности |
недостаток безопасности |
|
обратимость процессов |
— |
обратимость переходов |
обратимость переходов |
|
принцип Ле-Шателье-Брауна |
— |
— |
запас безопасности в ЭСС |
|
— |
закон Эшби |
— |
запас безопасности в ЭСС |
|
— |
закон возрастания эмерджентности |
— |
применим |
|
парадокс Гиббса |
— |
запас безопасности в ЭСС |
системы управления и связи |
|
парадокс Лошмидта |
— |
запас безопасности |
запас безопасности |
|
«демон» Максвелла |
— |
сигналы управления и связи |
сигналы управления и связи |
|
КПД процесса |
— |
КЭ |
— |
Для некоторых ТС в ходе работы может происходить изменение пространственных параметров функционирования при N СБ = const . В этом случае может быть изменение эффективности связей, потеря или ослабевание управления, усиление влияния внешних факторов. Информация о ТС содержит представление о её состоянии, свойствах и структуре. Данные об ЭСС конкретизируют базовое понимание о термодинамической энтропии ТС.
Дуализм безопасности позволяет рассматривать ТС с различных сторон. Информация имеет значение для описания состояния системы в целом и её компонентов. Внешние факторы M в своём диапазоне хаотически действуют на ТС, но величина N СБ определяет максимальный фактор готовности ТС к такому воздействию по величине Q lim . Количество РС через Q R определяет информацию о возможном падении уровня безопасности вследствие большого числа управляемых элементов ТС. Чем меньше имеется информации о состоянии безопасности, о состоянии управления, тем выше энтропия ТС и надо руководствоваться предельными случаями проекта ТС для готовности к возможным инцидентам и авариям:
-
■ полная информация соответствует нулевой энтропии, ТС не включена, элементы не взаимодействуют, их состояние не изменяется;
-
■ минимум (исчезновение) информации соответствует высокой энтропии, поскольку уменьшаются сведения о конкретных множественных состояниях элементов ТС.
Информация о начальной упорядоченности с полной информацией о состоянии элементов ТС переходит в понижение информации об ЭСС в ходе ЖЦ ТС.
Заключение
Наличие широкого круга характеристик и моделей проекта ТС позволяет эксперту участвовать в создании ТС с использованием трансдисциплинарного подхода [1, 3, 30]. При рассмотрении вопросов безопасности трудности в проведении опыта с ТС связаны с невозможностью точно воспроизвести состояние системы с внутренними и внешними условиями.
Незнание реального состояния ТС из-за множественности состояний в управлении компенсируется диапазоном СБ для управления ТС. Формируется двойственность в структуре рассмотрения вопросов безопасности ТС. Концептуальное рассмотрение ТС образует структурную схему дуализма в описании состояния и обеспечения безопасности для онтологии проектирования ТС [30]. Энтропия часто рассматривается в качестве инструмента анализа информации и информационных систем. В ЖЦ ТС количество информации по управлению увеличивается на основании закона возрастания эмерджентности. Состояние управления ТС определяет меру упорядоченности системы, способность контролировать и поддерживать требуемую проектом функциональность и свойства ТС.
Неуправляемая ТС не может характеризоваться безопасностью, для неё нельзя ни определить, ни ограничить её состояния, т.к. их нельзя зафиксировать. К дуализму безопасности можно прийти через рассмотрение неуправляемых ТС и структурирование ТС для построения системы её управления. В этом случае увеличение информации (по Шеннону) будет происходить в связи со снятием неопределённости о состояниях ТС. В обратном случае (при переходе от управления к ПУ) фиксируются множественные сведения об отказах и падении контроля, т.е. об отсутствии функциональности. Выражения (3)-(4), как и формула Хартли (2), несут информацию о влиянии внутреннего строения ТС (структурной, системной организованности, упорядоченности) на её устойчивость при функционировании. Дуализм безопасности показывает её многосторонность в единой системе с управлением.
Подходы к оценке управления и уровня безопасности ТС, например, сэйфеометрика, могут применяться при рассмотрении и оптимизации проектов систем коммуникаций, управления и связи наряду с известными методиками для автоматизированных систем управления производства [28]. Сравнение для проектов уровней негэнтропии, предельной величины обеспечиваемой безопасности позволяет прогнозировать срок и условия для возможной ПУ в ТС, предусмотреть меры и обеспечить к этому готовность ЭС (наличие резервов оборудования, подготовку персонала, возможность принимать своевременные решения).
