Описание и диагностирование неисправностей в автономных необитаемых подводных аппаратах на основе онтологий

Автор: Тимошенко А.А., Зуев А.В., Мурсалимов Э.Ш., Грибова В.В., Инзарцев А.В.
Журнал: Онтология проектирования @ontology-of-designing
Рубрика: Прикладные онтологии проектирования
Статья в выпуске: 3 (45) т.12, 2022 года.
Бесплатный доступ
В работе предложены новые онтологии для описания и диагностирования неисправностей подсистем автономных необитаемых подводных аппаратов (АНПА) в рамках развития подхода к интеллектуальному диагностированию таких аппаратов с помощью баз знаний. Для реализации этого подхода предложено использовать две базы знаний, одна из которых описывает неисправности, признаки для их определения и действия, необходимые для адаптации к негативным последствиям, вызванным появлением неисправностей. Другая база содержит информацию об основных подсистемах АНПА, устройствах и сменных модулях, а также состояниях, в которых они могут находиться. Базы знаний используются в работе интеллектуальной контрольно-аварийной системы (ИКАС) на борту АНПА. ИКАС позволяет обеспечить комплексное функциональное диагностирование всех подсистем аппарата, включая модули полезной нагрузки, а также адаптацию к последствиям возникающих неисправностей с учётом реально имеющихся причинно-следственных связей между ними. Предложенные онтологии для указанных баз знаний компактны, что позволяет использовать ИКАС на борту АНПА. Для поддержания актуальной информации о возможных неисправностях предлагается осуществлять непрерывное удалённое сопровождение ИКАС с помощью программной интернет-платформы разработки и поддержки интеллектуальных облачных сервисов IACPaaS . Для проверки работоспособности ИКАС был разработан её прототип, реализующий функции обработки баз знаний и выработки решений по адаптации к неисправностям. Результаты моделирования работы прототипа показали, что ИКАС выполняет поставленные задачи и может быть реализована на бортовых вычислителях существующих АНПА с применением известных технологий программирования.
Автономный необитаемый подводный аппарат, контрольно-аварийная система, диагностирование, онтология, интеллектуальная система, база знаний
Короткий адрес: https://sciup.org/170195761
IDR: 170195761 | УДК: 629.58 | DOI: 10.18287/2223-9537-2022-12-3-310-324
Description and diagnosis of malfunctions in autonomous uninhabited underwater vehicles based on ontologies
The paper proposes new ontologies for describing and diagnosing malfunctions of subsystems of autonomous underwater vehicles (AUVs) as part of the development of a previously created approach to the intelligent diagnosis of these vehicles using knowledge bases. To implement this approach, it is proposed to use two knowledge bases, one of which describes malfunctions, signs for their identification and actions necessary to adapt to the negative consequences caused by the appearance of these malfunctions. Another database contains information about the main subsystems of the AUVs, devices and replaceable modules, as well as the states in which they may be. Knowledge bases are used in the operation of intelligent control and emergency systems (ICES) on the AUV boards, which allow for comprehensive functional diagnostics of all subsystems of the device, including payload modules, as well as adaptation to the consequences of emerging malfunctions, taking into account the actual cause-and-effect relationships between them. The proposed ontologies for the indicated knowledge bases are compact, which makes it possible to use ICES on the AUV boards. To maintain up-to-date information about possible malfunctions, it is proposed to carry out continuous remote maintenance of ICES using the software Internet platform for the development and support of intelligent cloud services IACPaaS. To test the operability of ICES, its prototype was developed, which implements the functions of processing knowledge bases and developing solutions for adapting to faults. The simulation results of the prototype operation showed that ICES fulfills the assigned tasks and can be implemented on the on-board computers of existing AUVs using known programming technologies.
Текст научной статьи Описание и диагностирование неисправностей в автономных необитаемых подводных аппаратах на основе онтологий
В настоящее время автономные необитаемые подводные аппараты (АНПА) активно используются для исследования и освоения Мирового океана [1-5]. Последние разработки в области подводной робототехники направлены на расширение спектра задач, выполняемых АНПА, в том числе по автоматизированной добыче и транспортировке полезных ископаемых, а также по обслуживанию подводных комплексов и газопроводов [6-8]. Выполнение этих задач предполагает длительное функционирование АНПА без обслуживания, что повышает риск появления дефектов и отказов в различных подсистемах и модулях этих аппаратов, приводящих к прерыванию выполняемых задач или даже потере дорогостоящего оборудования. Поэтому важной задачей является обеспечение надёжного функционирования АНПА и своевременное обнаружение возникающих неисправностей. Для продолжения выполняемых подводных работ желательно обеспечить оперативное парирование последствий этих неисправностей за счёт коррекции управляющих сигналов или программ-заданий [9].
Для диагностирования неисправностей современные АНПА оснащаются контрольноаварийными системами (КАС) [10-14]. К наиболее распространенному набору выполняемых КАС функций относятся: выявление неисправностей бортового оборудования, аварийное завершение миссии с последующим всплытием аппарата на поверхность или формирование аварийных сигналов, если самостоятельное всплытие невозможно.
Cуществующие КАС, как правило, анализируют состояние подсистем АНПА изолированно друг от друга. Во многих случаях возможно появление неоднозначных ситуаций, для разрешения которых требуется комплексная оценка состояния взаимосвязанных подсистем аппарата. Такими ситуациями, например, являются последствия выхода из строя датчиков внешней среды; неоднозначная связь между неисправностью устройства и датчиками, которые контролируют его состояние; серия «независимых» аварий, являющихся следствием одной, напрямую не выявляемой неисправности [14]. Кроме того, существующие КАС не реализуют адаптацию к последствиям возникающих неисправностей, позволяющую продолжить выполнение миссий и операций. Можно отметить, что все известные подходы к построению указанных систем для АНПА не предполагают реализацию функционального диагностирования, т.е. проверку в процессе выполнения миссий правильности функционирования отдельных подсистем аппарата [15].
В работах [16-19] были предложены решения задачи синтеза систем функционального диагностирования (СФД) для АНПА с помощью банков наблюдателей для движителей [16,17] и навигационно-пилотажных датчиков [18,19]. Эти решения узкоспециализированы и не имеют реализации для модулей различной полезной нагрузки, а также сменного оборудования. Существующие СФД выполняют свои функции на основе сигналов и параметров только той подсистемы АНПА, для которой были созданы.
Для реализации комплексной диагностики робототехнических систем в последние годы прибегают к методам искусственного интеллекта с использованием баз знаний (БЗ), построенных на основе онтологического подхода [14, 20-22]. В работе [20] описана технология построения модели робота на основе онтологий для задач управления и диагностики, а в работе [21] показано применение данной технологии для подводного робота UX -1. В работе [22] предпринята попытка формализации ошибок, которые могут возникнуть в процессе функционирования манипулятора, но результаты работы не применимы к подводным роботам.
В работе [14] предложена концепция интеллектуальных КАС (ИКАС), использующих БЗ для комплексного анализа неисправностей АНПА и выработки решений по адаптации к ним. БЗ позволяют формально описать неисправности и признаки для их определения, а онтологический подход к построению БЗ позволяет унифицировать их структуру и включить в процесс разработки экспертов предметной области (ПрО), которые обеспечивают их качественное наполнение. Для непрерывного удалённого сопровождения БЗ в работе предложено использовать программную интернет-платформу разработки и поддержки интеллектуальных облачных сервисов IACPaaS [23].
Актуальной остаётся задача построения КАС для АНПА, обеспечивающих комплексное функциональное диагностирование всех подсистем аппарата, включая модули полезной нагрузки, и адаптацию к возникающим неисправностям с учётом имеющихся причинноследственных связей между ними.
1 Постановка задачи
Целью настоящей работы является разработка онтологий для формирования БЗ, используемых в ИКАС для описания и диагностирования неисправностей бортовых подсистем АНПА. Эти онтологии должны иметь простую структуру, учитывать различные конфигурации подводных аппаратов, повысить их универсальность и упростить создание и эксплуатацию ИКАС.
2 Описание подхода к решению задачи
Функционирование ИКАС должно осуществляться с помощью БЗ, построенных на основе онтологического подхода, а непрерывное удалённое сопровождение БЗ экспертами ПрО обеспечиваться использованием интернет-платформы разработки и поддержки интеллектуальных облачных сервисов lACPaaS [23]. В процессе функционирования АНПА, как правило, не имеет доступа к сети Интернет, поэтому БЗ должны обрабатываться автономно на борту АНПА и между его запусками.
В настоящей работе предложено использовать две разные по назначению БЗ. Основная БЗ должна содержать информацию о возможных неисправностях в используемом бортовом оборудовании АНПА, признаках для их обнаружения и возможных действиях для адаптации к ним. Во время длительных исследовательских экспедиций могут изменяться конфигурация конкретного АНПА за счёт установки различных вариантов полезной нагрузки и возможные неисправности АНПА. Поэтому вторая БЗ должна описывать набор компонентов и сменных модулей, из которых может состоять АНПА, и состояний, в которых они могут находиться. Содержимое этих БЗ определяется соответствующими онтологиями, которые должны иметь простую и логичную структуру для удобства их понимания и сопровождения экспертом.
3 Разработка общей схемы работы ИКАС
Назначением ИКАС является выявление диагностических ситуаций (ДС), возникающих в процессе работы АНПА, и выработка действий, необходимых для устранения или минимизации последствий, вызванных появлением неисправностей. ДС - это особое состояние АНПА, выраженное в возникновении одной или нескольких неисправностей в подсистемах аппарата и требующее проведения дополнительных диагностических или адаптационных действий. В работе предлагается определять наличие каждой возникающей ДС путём вычисления логического выражения, элементами которого являются атомарные признаки (АП), под которыми понимаются элементарные состояния подсистем АНПА. АП не делятся на более мелкие состояния и могут принимать значения истина или ложь . Источниками АП могут являться отдельные датчики АНПА, вырабатывающие логический сигнал (например, датчик воды в отсеке), встроенные системы самодиагностики отдельных устройств, а также СФД, входящие в состав ИКАС.
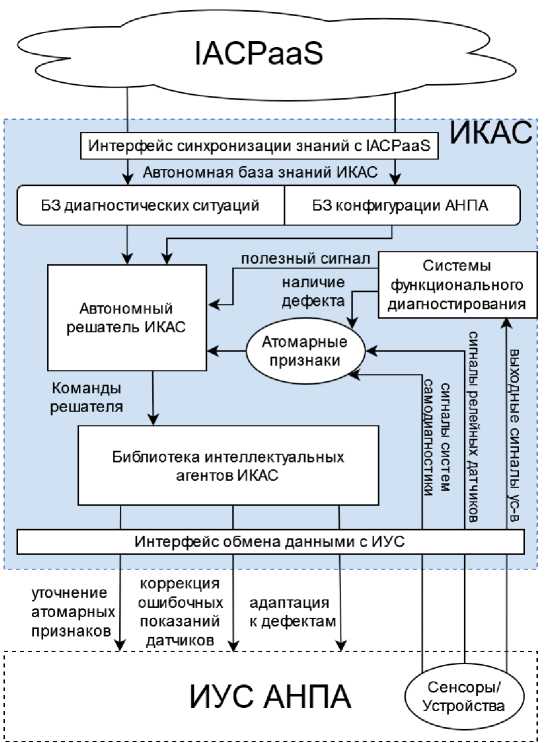
Обобщённая структурная схема предлагаемой ИКАС показана на рисунке 1 и включает следующие основные элементы.
-
■ БЗ ДС содержит информацию о ДС, соответствующих текущей конфигурации АНПА, АП, необходимых для их определения, и действиях, предпринимаемых при обнаружении неисправностей.
-
■ БЗ конфигурации АНПА содержит информацию об устройствах и модулях, из которых состоит АНПА, а также АП, которые могут быть ими сгенерированы.
-
■ Интерфейс синхронизации с облачной платформой IACPaaS необходим для обновления БЗ на АНПА вне миссии при подключении к сети Интернет, т.к. ИКАС на АНПА работает автономно и использует только ту часть знаний, которая относится к текущей конфигурации АНПА.
-
■ Автономный решатель ИКАС - основной элемент ИКАС, осуществляющий анализ АП, декодирование БЗ, определение ДС и назначение соответствующих
адаптационных действий.
-
■ Библиотеки интеллектуальных
агентов ИКАС отвечают за вы-
IACPaaS
ИКАС
Сенсоры/ Устройства
Атомарные признаки
ИУС АНПА уточнение атомарных признаков коррекция ошибочных показаний датчиков
Команды решателя наличие дефекта
Системы функционального диагностирования полезный сигнал
Библиотека интеллектуальных агентов ИКАС
Интерфейс обмена данными с ИУС адаптация к дефектам
___________У ф Автономная база знаний ИКАС ф
БЗ диагностических ситуаций
БЗ конфигурации АНПА
Автономный решатель ИКАС
| Интерфейс синхронизации знаний с IACPaaS
Рисунок 1 - Обобщённая структурная схема работы ИКАС
полнение действий, назначаемых решателем ИКАС при обнаружении ДС. Действия могут быть направлены как непосредственно на адаптацию к неисправностям, так и на проведение дополнительных диагностических действий для уточнения состояния АНПА.
-
■ Взаимодействие ИКАС с интеллектуальной управляющей системой (ИУС) АНПА происходит посредством интерфейса обмена данными с ИУС. К этим данным относятся параметры и выходные сигналы подсистем АНПА, а также команды и запросы, отправляемые ИКАС.
-
4.1 Онтология ДС
СФД формируют АП на основе анализа данных, получаемых от бортовых сенсоров и устройств АНПА через интерфейс обмена данными, с использованием специальных алгоритмов, в том числе на основе диагностических наблюдателей.
В сопровождении ИКАС во время её эксплуатации участвуют: эксперт ПрО, программист-разработчик и оператор АНПА. Эксперт ПрО должен отвечать за наполнение и обновление БЗ, располагающихся на облачной платформе IACPaaS, понимать основные процессы, происходящие в АНПА во время его функционирования, знать по каким признакам можно определить неисправности бортового оборудования и что необходимо сделать для обеспечения безопасного завершения выполняемых миссий. Программист-разработчик отвечает за программную реализацию ИКАС на бортовом компьютере АНПА и настройку интерфейса обмена данными с ИУС. Архитектура ИУС может не предполагать считывание параметров и выходных сигналов вновь установленного оборудования полезной нагрузки. Поэтому может потребоваться разработать дополнительный блок ИУС, который обеспечит доступ к указан- ным данным для стороннего программного обеспечения (ПО). Оператор является конечным пользователем ИКАС. Его задачей является определение конфигурации АНПА до начала миссий с помощью соответствующего пользовательского интерфейса.
4 Разработанные онтологии
Онтология ДС содержит описание отношений между АП, ДС и действиями для их разрешения. Упрощённо её можно представить в виде ориентированного графа (рисунок 2), вершинами которого являются понятия, а рёбра показывают отношения между ними.
Центральным понятием предложенной онтологии является ДС, которая определяется как результат логического выражения, элементами которого являются АП. В онтологии не реализуются логические операции, а только устанавливаются связи между понятиями. Например, на рисунке 2 к понятию «Конъюнкция» ведут три ребра из понятий «Дизъюнкция»,
«Отрицание» и «Атомарный признак». Это означает, что любое из трёх понятий или их совокупность могут быть элементами конъюнкции, например « конъюнкция 1 = атомарный признак 1 Λ атомарный признак 2 Λ дизъюнкция 1 Λ отрицание 1 ». При этом из понятия «Конъюнкция» ведёт ребро к понятию «Дизъюнкция», это значит, что результат этой конъюнкции может быть элементом дизъюнкции, например: « дизъюнкция 2 = конъюнкция 1 V атомарный признак 3 = ( атомарный признак 1 Л атомарный признак 2 Λ дизъюнкция 1 Λ

Рисунок 2 - Онтология диагностических ситуаций
отрицание 1) V атомарный признак 3». Логические операции осуществляются в автономном решателе ИКАС. Примеры ДС для АНПА и их логических условий согласно предложенной онтологии приведены в таблице 1. Верхнее условие для каждой ДС задано напрямую, интуи- тивно, тогда как альтернативное условие является эквивалентным, оптимизированным по известным законам де Моргана [24].
В таблице 1 каждой ДС соответствует определённое действие, которое может состоять из нескольких более мелких действий, порядок которых определяется их типом: аварийное, адаптационное или диагностическое. Аварийное действие (завершение миссии, всплытие со сбросом балласта) имеет наивысший приоритет, выполняется в первую очередь по сравнению с другими командами, вызывается при неисправностях АНПА, делающих невозможным дальнейшее функционирование АНПА в качестве носителя полезной нагрузки. Адаптационное действие (восстановление навигационной системы) имеет средний приоритет, вызывается для компенсации последствий возникающих дефектов. Диагностическое действие (приостановка миссии и т.п.) имеет наименьший приоритет, вызывается при возникновении неоднозначных ситуаций, когда один или несколько АП могут сигнализировать о неисправностях и требуется дополнительная диагностика подсистем АНПА. Онтология в lACPaaS показана на рисунке 3, а пример описания некоторых ДС из таблицы 1 - на рисунке 4.
Таблица 1 – Примеры типовых ДС, возникающих в АНПА (КСКАБ – контроллер силовых ключей аккумуляторной батареи, АВБ – аварийная батарея, КАБ – контроллер аккумуляторной батареи)
|
№ |
ДС |
Условие |
Действие |
|
1 |
Невозможность запуска миссии |
Выполняется миссия Λ ( версия встроенного ПО КСКАБ актуальна V АВБ исправно V параметры КАБ в допустимых пределах V есть связь со всеми батареями) Альтернативное условие: (Выполняется миссия V (версия встроенного ПО КСКАБ актуальна Λ АВБ исправно Λ параметры КАБ в допустимых пределах Λ есть связь со всеми батареями)) |
Запрет запуска миссии (Аварийное действие) |
|
2 |
Необходимость прекращения миссии без сброса балласта |
Выполняется миссия Λ (обнаружение береговой линии V параметры КАБ в допустимых пределах V есть связь с батареей 1 V есть связь с батареей 2 V есть связь с батареей 3) Альтернативное условие: Выполняется миссия Λ (обнаружение береговой линии V (параметры КАБ в допустимых пределах Λ есть связь с батареей 1 Λ есть связь с батареей 2 Λ есть связь с батареей 3)) |
Экстренное завершение миссии (Аварийное действие) |
|
3 |
Необходимость прекращения миссии со сбросом балласта |
Выполняется миссия Λ (аварийное отключение батареи V нет навигации для галса V маршевая группа исправна V (есть связь с батареей 1 Λ есть связь с батареей 2 Λ есть связь с батареей 3))) Альтернативное условие: Выполняется миссия Λ (аварийное отключение батареи V нет навигации для галса V (маршевая группа исправна Λ (есть связь с батареей 1 V есть связь с батареей 2 V есть связь с батареей 3))) |
Экстренное завершение миссии (Аварийное действие), сброс балласта (Аварийное действие) |
|
4 |
Необходимость восстановления навигационной системы |
Выполняется миссия Λ навигационные данные достоверны Λ выставка навигационных данных в процессе Альтернативное условие: Выполняется миссия Λ (навигационные данные достоверны V выставка навигационных данных в процессе) |
Восстановление навигационной системы (Адаптационное действие) |
|
5 |
Возможно, произошло нама тывание мусора на винт / заклинивание вала движителя маршевой группы |
Задаётся движение Λ (свободное вращение маршевой группы V допустимая ошибка движения по траектории V допустимая температура силовых ключей маршевой группы) Альтернативное условие: Задаётся движение Λ (свободное вращение маршевой группы Λ допустимая ошибка движения по траектории Λ допустимая температура силовых ключей маршевой группы |
Приостановка миссии (Диагностическое действие, ДД), перевод АНПА в режим зависания (Диагностическое действие), штатное тестирование движителя (ДД) |
Таким образом, предложенная онтология позволяет формально описать все ДС с помощью логических выражений, используя при этом меньшее число понятий и имея простую структуру.
-
4.2 Онтология конфигурации АНПА
Онтология конфигурации АНПА содержит описание отношений между основными подсистемами (блоками) АНПА, относящимися к ним устройствами и сменными модулями (элементами АНПА), и АП. Она связана с онтологией ДС через понятие «АП». При сопровождении БЗ на платформе IACPaaS эксперт должен описать конфигурацию АНПА и после этого наполнять базу ДС, делая ссылки на АП, генерируемые различными подсистемами и сменными модулями АНПА. Схема онтологии приведена на рисунке 5, а пример её представления на платформе IACPaaS показан на рисунке 6.
т Диагностическая ситуация '{СПИСОК}
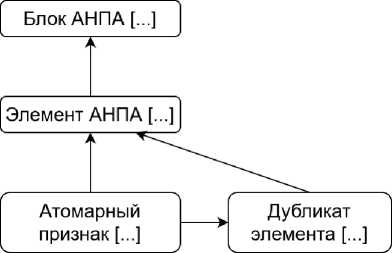
Рисунок 3 – Схема онтологии конфигурации АНПА
Особое состояние- системы; еь/ражен/юе в возникновении неполадок и требующее пр
Т Условие {АЛЬТЕРНАТИВА}
-
т *• Дизъюнкция {СПИСОК}
-
►■ *• Конъюнкция ([Д 'seqmm') (new)
-
► *• Отрицание ([л] 'seqmm') (new)
-
—* Атомарный признак (сорт: строковое} ([*] 'listmm'} (ref)
Т а- Конъюнкция {СПИСОК}
I > ** Дизъюнкция (["] 'seqmm') (new)
► *• Отрицание ([л] 'seqmm') (new)
— Атомарный признак (сорт: строковое) ([*] listmm') (ref)
т ** Отрицание {АЛЬТЕРНАТИВА} i > *• Дизъюнкция ( = 'copy') (new)
i > *• Конъюнкция ( = 'copy') (new)
-> Атомарный признак (сорт: строковое) ( I 'one') (ref)
т Действие {АЛЬТЕРНАТИВА}
6 Диагностическое действие (сорт: строковое) * ( * list') (all) О Адаптационное действие (сорт: строковое) * ( * 'list') (all)
О Аварийное действие (сорт: строковое)' ( ' list1) (all)
Рисунок 4 – Онтология ДС на платформе IACPaaS
Т Невозможность запуска миссии [Диагностическая ситуация]' N 0
т Условие 0
[ : ▼ Отрицание N 0
т Дизъюнкция ^ 0
-
—• Выполняется миссия [Атомарный признак (сорт: строковое)]
т 1 [Конъюнкция]
-
i -* Актуальная версия встроенного ПО КСКАБ [Атомарный признак (сорт: строковое)]
-
- > АВБ исправно [Атомарный признак (сорт: строковое)]
-
- * Параметры КАБ в допустимых пределах [Атомарный признак (сорт: строковое)]
-
- > Допустимая температура ключей ДРК [Атомарный признак (сорт: строковое)]
i i i -* Есть связь с батареей [Атомарный признак (сорт: строковое)]
-
- > Есть связь с батареей [Атомарный признак (сорт: строковое)]
-
- * Есть связь с батареей [Атомарный признак (сорт: строковое)]
-
- > Есть связь с батареей [Атомарный признак (сорт: строковое)]
-
- * Есть связь с батареей [Атомарный признак (сорт: строковое)] ; ^wrWSSWtoiSWSSWStftoW:;#;;:;^^
т Действие ► 0
О Запрет запуска миссии [Аварийное действие (сорт: строковое)]'
т Необходимость прекращения миссии без сброса балласта [Диагностическая ситуация] *
Т Условие 0
i [ ▼ Конъюнкция N 0
-
-4 Выполняется миссия [Атомарный признак (сорт: строковое)]
т 1 [Дизъюнкция]
-
-i Обнаружение береговой линии [Атомарный признак (сорт: строковое)]
т 1 [Отрицание]
; N N т Конъюнкция е 0
-
-> Допустимая температура ключей ДРК [Атомарный признак (сорт: строковое)]
— Параметры КАБ в допустимых пределах [Атомарный признак (сорт: строковое)]
-> Свободное вращение МГ ' [Атомарный признак (сорт: строковое)]
— Есть связь с батареей [Атомарный признак (сорт: строковое)]
-> Есть связь с батареей [Атомарный признак (сорт: строковое)]
— Есть связь с батареей [Атомарный признак (сорт: строковое)]
-
-> Есть связь с батареей [Атомарный признак (сорт: строковое)]
-
— Есть связь с батареей [Атомарный признак (сорт: строковое)]
т Действие * 0
О »• Завершение миссии [Аварийное действие (сорт: строковое)]'
Рисунок 5 – Фрагмент БЗ ДС на платформе IACPaaS
-
▼ и Онтология конфигурации АНПА* {СПИСОК}
Описывает взаимосвязь между блоками автономных необитаемых подводных аппаратов (например, навигационная система, система поиводов), отдельными элементами АПР и возможными атомарными признаками
Т Блоки АНПА {СПИСОК}
‘ > Элементы АНПА {СПИСОК} 'list') (п i i >* Атомарный признак (сорт: строковое) ([*] 'listmm') (all)
i ‘ :▼ Дубликат элемента АНПА * {СПИСОК} ([Д 'seqmm'} (new)
Используется, если s системе присутствует несколько одинаковых элементов АНПА с идентичным функционалом и набором апюмарных признаков, которые необходимо отслеживать по отдельности.
** Атомарный признак (сорт: строковое) ([*] 'listmm') (all)
Рисунок 6 – Онтология конфигурации АНПА на платформе IACPaaS
В онтологию введено понятие «дубликат элемента» (см. рисунок 3). Это обусловлено тем, что определённые конфигурации АНПА имеют несколько идентичных элементов с одинаковым набором атомарных признаков, например, несколько батарейных модулей, несколько фотокамер и т.п. В таблице 1 приведены определения ДС «Необходимость прекращения миссии без сброса балласта» и «Необходимость прекращения миссии со сбросом балласта». Первая ситуация возникает, если есть связь хотя бы с одной из батарей, вторая – если связи нет ни с одной из батарей. В результате необходимо отслеживать состояние каждой из батарей индивидуально, что обеспечивается введением в онтологию дубликатов, копирующих АП оригинала. Пример описания БЗ конфигурации АНПА на платформе IACPaaS приведён на рисунке 7.
-
▼ и Конфигурации АНПА [Онтология конфигурации АНПА] *^
officesuit@mail ги/Мой Фон Д'База знаний диагностических ситуаций/Конфигурации АНПА
-
▼ Система энергообеспечения * [Блоки АНПА]
СЭО - система энергообеспечения i > Батарейный модуль [Элементы АНПА]
-
▼ Навигационно-пилотажные датчики [Блоки АНПА]
-
► УГловой датчик [Элементы АНПА]
-
► Датчик глубины [Элементы АНПА]
-
► Измеритель параметров среды [Элементы АНПА]
-
► ИНС * [Элементы АНПА]
-
► ЭЛС * [Элементы АНПА]
-
▼ Доплеровский лаг [Элементы АНПА]
: ДЛ исправен * [Атомарный признак (сорт: строковое)]
i ДЛ включен * [Атомарный признак (сорт: строковое)]
Данные ДЛ достоверны * [Атомарный признак (сорт: строковое)]
Вода в ДЛ * [Атомарный признак (сорт: строковое)]
-
▼ Контроллер навигационной системы [Элементы АНПА]
-
>• Навигационные данные достоверны [Атомарный признак (сорт: строковое)]
-
>• Выставка навигационных данных в процессе [Атомарный признак (сорт: строковое)]
-
► Сеть передачи данных [Блоки АНПА]
-
> Вычислительная система [Блоки АНПА]
-
► Полезная нагрузка [Блоки АНПА]
-
► Приводы и электродвигатели [Блоки АНПА]
Рисунок 7 – Фрагмент описания конфигурации АНПА на платформе IACPaaS
5 Разработка прототипа ИКАС и моделирование его работы
Для исследования эффективности подхода к описанию и диагностированию неисправностей разработан прототип ИКАС на языке Python. Прототип реализует часть функций ИКАС, а именно чтение и декодирование БЗ, сформированных с помощью платформы IACPaaS, а также вычисление ДС на основе АП и вывод действий для их разрешения.
Для проверки работы прототипа ИКАС было проведено компьютерное моделирование, при котором имитировались различные неисправности оборудования АНПА, включая случаи возникновения одновременно нескольких неполадок, а также неоднозначных ситуаций, требующих дополнительных действий со стороны АНПА для точного определения конкретного вида поломки. При этом моделировалось возникновение АП, так как формируемый в ИКАС результат зависит именно от них. На данном этапе моделирования это позволило проводить проверку работоспособности прототипа без использования реальной ИУС АНПА или её модели.
Прототип ИКАС состоит из СФД, работающих параллельно (см. рисунок 8). СФД анализируют параметры и выходные сигналы элементов АНПА и формируют значения АП. При этом СФД анализируют не только простые неисправности (например, релейное срабатывание или преобразование данных), но и реализуют математический аппарат наблюдателей [10-13]. Каждая СФД формирует значение одного АП, поэтому для k признаков создаётся k СФД.
Предполагается, что СФД имеют разные режимы работы, зависящие от метода, используемого для анализа параметров АНПА. В рамках моделирования реализован только тестовый режим, подразумевающий случайное переключение значения АП в случайный момент времени в интервале 1-5 секунд. Из-за парал-
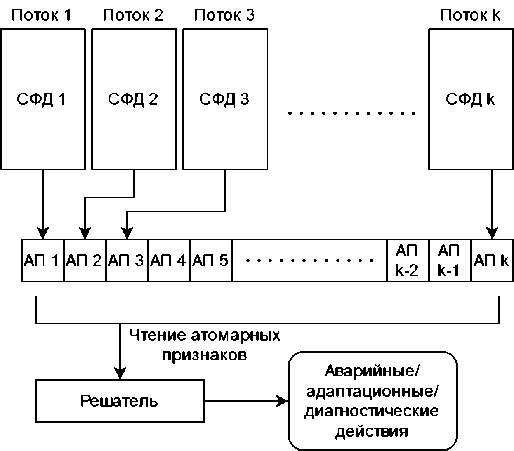
Рисунок 8 – Обобщённая схема работы алгоритма
"Выполняется миссия": True
"Актуальная версия встроенного ПО КСКАБ": True
"АВБ исправно": True
"Параметры КАБ в допустимых пределах": False
"Есть связь с батареей": True
"Есть связь с батареей": False
"Есть связь с батареей": False
"Есть связь с батареей": False
"Есть связь с батареей": True
"Обнаружение береговой линии": False
"Аварийное отключение батареи": False
"Нет навигации для галса": True
"НГ исправна": True
"Навигационные данные достоверны": True
"Выставка навигационных данных в процессе": True
"Задается движение": False
"Свободное вращение МГ": False
"Допустимая ошибка движения по траектории": False
"Допустимая температура силовых ключей МГ": False
Необходимость прекращения миссии без сброса балласта: --->Аварийное действие:Завершение миссии
Необходимость прекращения миссии со сбросом балласта:
—>Аварийное действие:Завершение миссии
—>Аварийное действие:Сброс балласта
лельной работы СФД при случайном изменении АП возникают ситуации, при которых неисправности проявляются ква-
Рисунок 9 – Фрагмент результата работы программы
зиодновременно, а предложенная ИКАС должна отработать такие ситуации.
В данной реализации ИКАС имитируется событийная модель его работы. При этом решатель с некоторой частотой считывает значения вектора АП и сравнивает их с предыдущи- ми. Если они были изменены, то запускается вычисление ДС и производится вывод необходимых аварийных, адаптационных или диагностических действий в виде текстового сообщения.
Так как операция вычисления ДС может быть достаточно ресурсоёмкой при обширной БЗ, то предложенная событийная модель работы решателя, по сравнению с полностью периодической, позволяет снизить нагрузку на бортовой вычислитель АНПА в случае отсутствия неисправностей. Взаимодействие с БЗ ДС и конфигурации аппарата происходит с помощью рекурсивного обхода графа.
Для адекватной оценки работы алгоритма и отработки различных возможных состояний АНПА СФД работают в некотором конечном цикле с нефиксированной периодичностью. Множественные изменения значений АП отрабатываются решателем согласно определениям ДС, приведённым в таблице 1, при этом БЗ ИКАС формируются непосредственно из файлов, загруженных с облачного сервиса IACPaaS .
В процессе работы прототип ИКАС выводит в консольное окно текстовую информацию о результатах своей работы при каждом изменении вектора АП (см. рисунок 9). При этом сначала отображаются все АП и их текущие логические значения ( True или False ), подаваемые на вход решателя, далее выводятся выявленные в результате работы решателя ДС и необходимые для выполнения действия. В данном случае проверялась реакция ИКАС на случайную комбинацию АП, постоянно изменяющуюся в ходе моделирования, и её способность обрабатывать информацию из БЗ, построенных по предложенным онтологиям. На рисунке показана одна из возможных комбинаций вектора АП и соответствующие им ДС. Из этого рисунка видно, что текущие логические значения АП соответствуют двум ДС (№ 2 и № 3, см. таблицу 1).
Эти логические значения были обработаны решателем, который в результате вывел в консоль информацию о необходимости выполнения двух аварийных действий. В данном случае приоритет этих действий совпадает (оба аварийные), поэтому они будут выполняться совместно. В случаях, когда определяется несколько ДС, например, №2 и №4 (см. таблицу 1), аварийное действие (завершение миссии) должно выполняться раньше адаптационного (восстановление навигационной системы).
Заключение
В работе предложены онтологии для построения БЗ, предназначенных для описания и диагностирования неисправностей, возникающих в процессе функционирования АНПА, и описана схема работы ИКАС, основанная на использовании этих БЗ. Работа ИКАС позволяет обеспечивать безопасное завершение или продолжение выполняемых роботом миссий в случае обнаружения неисправностей бортового оборудования АНПА за счёт функционального диагностирования всех подсистем и сменных модулей аппарата, в том числе модулей полезной нагрузки. Используемые БЗ описывают конфигурацию АНПА, возможные ДС, условия для их определения и действия, которые необходимо предпринять для их разрешения, разработанные онтологии обладают упрощённой и интуитивно понятной структурой, что облегчает реализацию и последующую эксплуатацию ИКАС.
Эффективность предложенного решения проверена с использованием созданного прототипа ИКАС, в котором реализованы функции автономного решателя ИКАС, заключающиеся в обработке БЗ с целью определения ДС и выработке команд по их разрешению. Результаты моделирования подтвердили работоспособность прототипа ИКАС и предложенного подхода к описанию и диагностированию неисправностей бортовых подсистем АНПА.
Список литературы Описание и диагностирование неисправностей в автономных необитаемых подводных аппаратах на основе онтологий
- Инзарцев А.В., Киселев Л.В., Костенко В.В., Матвиенко Ю.В., Павин А.М., Щербатюк А.Ф. Подводные робототехнические комплексы: системы, технологии, применение // Под ред. Л.В. Киселева; Владивосток: ФГБУН Ин-т проблем морских технологий ДВО РАН. 2018. 368 с.
- Antonelli G. Underwater Robots. Springer International Publishing Switzerland. 2014. 279 p.
- DhanakM.R., Xiros N.I. (ed.). Springer handbook of ocean engineering. Springer, 2016.
- Боровик А.И. Технология использования АНПА для исследования подводных потенциально опасных объектов в Карском Море. Подводные исследования и робототехника. 2022. Т.39. №1. С.32-40. DOI: 10.37102/1992-4429_2022_39_01_03.
- Бабаев Р.А., Боловин Д.А., Борейко А.А. и др. Технология использования АНПА для исследования глубоководных экосистем Атлантического сектора Антарктики. Подводные исследования и робототехника. 2020. Т.32. №2. С.13-21. DOI: 10.37102/24094609.2020.32.2.002.
- Филаретов В.Ф., Климчик А.С., Юхимец Д.А., Коноплин А.Ю., Зуев А.В. Интеллектуальные подводные робототехнические комплексы для выполнения осмотровых и технологических операций на морских газопроводах и добычных комплексах. Газовая промышленность. 2020. T.804. №8. С.30-38.
- Ghis S., Fischer E. Record-Setting AUV Pipeline Inspection in Deepwater West Africa. Offshore Technology Conference. OnePetro. 2017.
- Kowalczyk M., Claus B., Donald C. AUV integrated cathodic protection iCP inspection system-results from a North Sea survey. Offshore Technology Conference. OnePetro. 2019.
- Zhang S., Li Y., Liu S., Shi S., Chai H., Cui Y. A Review on Fault-Tolerant Control for Robots. Proc. of the 35th Youth Academic Annual Conference of Chinese Association of Automation (YAC). Zhanjiang, China. 2020. P.423-427.
- SeaRaptor Teledyne. http://www.teledynemarine.com/searaptor-auv.
- Osprey Teledyne. http://www.teledynemarine.com/osprey-auv?BrandID=9.
- Remus-100 Autonomous Underwater Vehicles (2013). https://www.naval-technology.com/projects/remus-100-automatic-underwater-vehicle/.
- Елисеенко Г.Д., Инзарцев А.В., Павин А.М. Многоуровневая распределенная контрольно-аварийная система АНПА. Подводные исследования и робототехника. 2020. Т.34. №4. С.23-30. DOI: 10.37102/24094609.2020.34.4.003.
- Инзарцев А.В., Грибова В.В., Клещев А.С. Интеллектуальная система для формирования адекватного поведения автономного подводного робота в аварийных ситуациях. Подводные исследования и робототехника. 2015. № 2(20). С.4-11.
- Blanke M., Kinnaert M., Lunze J., Staroswiecki M. Diagnosis and fault-tolerant control (3nd ed.). Berlin: Springer, 2016. 695 p.
- Zuev A.V., Zhirabok A.N., Filaretov V.F. Fault identification in underwater vehicle thrusters via sliding mode observers. Int. Journal of Applied Mathematics and Computer Science. 2020. Vol.30. No.4. P.1-6.
- ФиларетовВ.Ф., Зуев А.В., Жирабок А.Н., Проценко А.А. Разработка системы аккомодации к дефектам в движителях подводных роботов. Мехатроника, автоматизация, управление. 2021. Т.22. № 5. С.262-271.
- Филаретов В.Ф., Жирабок А.Н., Зуев А.В., Проценко А.А. Метод синтеза систем диагностирования и аккомодации к дефектам в навигационных датчиках автономных подводных аппаратов. Информационно-измерительные и управляющие системы. 2015. Т.13. №7. С.32-40.
- Жирабок А.Н., Зуев А.В., Проценко А.А., Туфанов И.Е., Филаретов В.Ф., Щербатюк А.Ф. Построение и экспериментальные исследования системы счисления пути малогабаритного автономного необитаемого подводного аппарата с аккомодацией к ошибкам в показаниях датчиков. Датчики и системы. 2015. №11. С.60-67.
- Bermejo-Alonso J., Hernández C., Sanz R. Model-based engineering of autonomous systems using ontologies and metamodels. IEEE International Symposium on Systems Engineering (ISSE). IEEE, 2016. P.1-8.
- Hernandez Corbato C., Milosevic Z., Olivares C., Rodriguez G., Rossi C. Meta-control and Self-Awareness for the UX-1 Autonomous Underwater Robot. Iberian Robotics conference. Springer, Cham, 2019. P.404-415.
- Diab M., Pomarlan M., Bepler D., Akbari A., Rosell J., Bateman J., Beetz M. An ontology for failure interpretation in automated planning and execution. Iberian Robotics conference. Springer, Cham, 2019. P.381-390.
- Gribova V., Kleschev A., Moskalenko P., Timchenko V., Fedorisdiev L., Shalfeeva E. The IACPaaS cloud platform: Features and perspectives. Second Russia and Pacific Conference on Computer Technology and Applications (RPC). IEEE, 2017. P.80-84.
- Завалишин Е.П. Логика. Тула: ТулГУ. 2017.
