Описание предельной окружной скорости тангенциально расположенных захватывающих органов дисковых бункерных загрузочных устройств для асимметричных заготовок формы тел вращения

Автор: А.Л. Бахно, С.А. Васин, Е.В. Пантюхина
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 3 т.28, 2026 года.
Бесплатный доступ
В статье рассматривается подход для определения вероятности отсутствия помех от окружной скорости захватывающих органов в виде карманов, равномерно расположенных по периферии вращающегося диска механических бункерных загрузочных устройств при захвате асимметричных заготовок формы тел вращения. Продемонстрированы различные варианты захвата асимметричных заготовок в тангенциально расположенные органы захвата. Рассматриваются процессы западания заготовок путем свободного падения, закатывания или скольжения при неподвижном расположении заготовки и при ее движении с некоторым значением начальной скорости. Представлены выражения для определения предельных окружных скоростей тангенциально расположенных карманов для каждого рассмотренного способа западания заготовки в карман и графики зависимости предельного значения окружной скорости в зависимости от конструктивных параметров органов захвата и геометрических размеров асимметричных заготовок.
Бункерное загрузочное устройство, окружная скорость захватывающих органов, западание заготовок в карман, тангенциальное расположение органов захвата, вероятность захвата
Короткий адрес: https://sciup.org/148333835
IDR: 148333835 | УДК: 621.9.06 | DOI: 10.37313/1990-5378-2026-28-3-214-219
Description of Limit Peripheral Speed of Tangentially Located Gripping Members of Disk Hopper Feeders for Asymmetric Blanks of the Shape of Solids of Revolution
The article describes an approach for determining the probability of absence of interference from the peripheral speed of gripping members in the form of pockets uniformly arranged along the periphery of a rotating disk of mechanical hopper feeders when gripping asymmetric workpieces of the shape of bodies of revolution. Various options for gripping asymmetric workpieces in tangentially arranged gripping members are demonstrated. Processes of workpieces sinking by means of free fall, rolling or sliding at fixed position of workpiece and at its movement with some value of initial speed are considered. There are presented expressions for determination of limit circumferential speeds of tangentially located pockets for each considered method of lowering the workpiece into the pocket and graphs of dependence of limit value of circumferential speed depending on design parameters of gripping members and geometrical dimensions of asymmetric workpieces.
Текст научной статьи Описание предельной окружной скорости тангенциально расположенных захватывающих органов дисковых бункерных загрузочных устройств для асимметричных заготовок формы тел вращения
Одним из основных направлений исследования при проектировании механических дисковых бункерных загрузочных устройств (БЗУ) является теоретическое построение математических моделей вероятности захвата асимметричных заготовок, позволяющее получить математические зависимости фактической производительности БЗУ, определить влияющие на нее факторы (параметры заготовок и БЗУ) и обеспечить максимально возможные или требуемые значения при дальнейшей эксплуатации [1, 2, 3].
Захват асимметричных заготовок в БЗУ обеспечивается захватывающими органами в виде карманов, равномерно расположенных по периферии вращающегося диска БЗУ. При разработке математических моделей вероятности захвата η= pi pc p υ учитываются вероятность p i нахождения заготовок по направлению к карману в положении, благоприятном для захвата, вероятности того, что захвату не помешает взаимосцепляемость заготовок pc и окружная скорость υ органов захвата БЗУ p и [4, 5]. Так как имеется некоторое значение окружной скорости - и Пред, при которой захват заготовок карманами вращающегося диска не возможен совсем, то можно записать:
-
4. -4 p у 1 и и пред.
Таким образом, определение вероятности p υ того, что захвату не помешает окружная скорость захватывающих органов БЗУ, сводится к получению выражения для предельного значения окружной скорости и Пред, при которой расположенные на вращающемся диске с некоторым шагом карманы БЗУ не смогут обеспечить захват ни одной заготовки [6].
В механических дисковых БЗУ западание заготовок в карманы в зависимости от их расположения осуществляется различными способами. Захватывающие органы БЗУ могут располагаться по периферии вращающегося диска радиально или тангенциально, что предопределяет подход для описания предельного значения окружной скорости для каждого конкретного случая.
СПОСОБЫ ЗАПАДАНИЯ АСИММЕТРИЧНЫХ ЗАГОТОВОК В ТАНГЕНЦИАЛЬНЫЕ КАРМАНЫ ВРАЩАЮЩЕГОСЯ ДИСКА
Рассмотрим схемы западания асимметричных заготовок при захвате в зависимости от способа расположения захватывающих органов по периферии вращающегося диска - тангенциальное или радиальное расположение [7].
а б
Рис. 1. Схемы вращающихся дисков БЗУ с тангенциально (а) и радиально (б) расположенными органами захвата: 1 - обечайка бункера; 2 - карман; 3 - вращающийся диск
В тангенциально расположенные органы захвата заготовка формы тел вращения может западать несколькими способами.
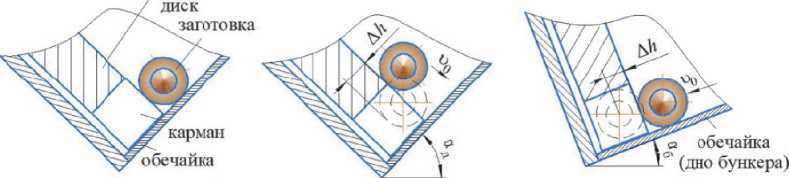
В первом случае заготовка располагается образующей своей боковой поверхности вдоль периферии на стыке между обечайкой бункера и вращающимся диском, находясь неподвижно на поверхности вращающегося диска (рис. 2, а), скатываясь с поверхности вращающегося диска и свободно падая в карман (рис. 2, б) или скатываясь по обечайке (дне бункера) в карман вращающегося диска (рис. 2, в). При этом во втором и третьем случае заготовка имеет начальную скорость и о.
вращающийся
а б в
Рис. 2. Схемы западания асимметричных заготовок формы тел вращения в тангенциально расположенные карманы при нахождении заготовок на стыке обечайки и периферии вращающегося диска: заготовка располагается на вращающемся диске неподвижно (а) или скатывается с его поверхности (б), заготовка скатывается с обечайки (в)
Процесс западания заготовки осуществляется тогда, когда тангенциально расположенный карман проходит под заготовкой (рис. 2, а, б) или впереди заготовки (рис. 2, в). За это время заготовка должна запасть в карман на некоторую глубину Д h (как правило, равную половине или чуть большую половине диаметра заготовки). При западании в карман на эту глубину состоится требуемый захват заготовки, и ее выброс из кармана будет не возможен.
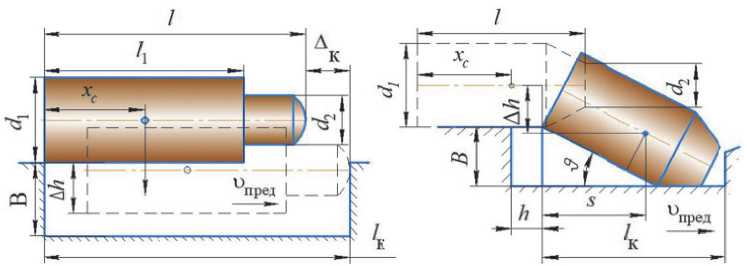
Процессы западания заготовок в тангенциальные карманы в другой плоскости представлены на рис. 3. Заготовка западает в карман путем свободного падения или закатывания, как показано на рис. 2, а, б, в (рис. 3, а) или скольжением, как показано на рис. 2, в, например, по боковой фаске кармана (рис. 3, б).
Рассмотрим для каждого варианта западания определение предельной окружной скорости по захвату асимметричных заготовок формы тел вращения: путем закатывания с поверхности обечайки (дна бункера) и скольжением с боковой фаски.
ЗАПАДАНИЕ АСИММЕТРИЧНЫХ ЗАГОТОВОК В ТАНГЕНЦИАЛЬНЫЕ КАРМАНЫ ПУТЕМ ЗАКАТЫВАНИЯ
Определение предельной окружной скорости по захвату заготовок формы тел вращения при их закатывании с поверхности обечайки (дна бункера), расположенного под углом а б , осуществляется по выражению:
а
б
Рис. 3. Схемы западания асимметричных заготовок формы тел вращения в тангенциально расположенные карманы при нахождении заготовок путем свободного падения или закатывания (а) или скольжением с боковой фаски (б)
и пред
= Д к
mgdi sin а б
^ 2Д h ( md? + 4 J ц)
где Д К - зазор между стенкой кармана и заготовкой, м; m - масса заготовки, кг; J ц - момент инерции центра масс заготовки относительно центра качения, кг-м2 [8].
Момент инерции центра масс асимметричной заготовки относительно центра качения определится как сумма моментов инерции каждой из ее частей (свойство аддитивности момента инерции твердого тела).
Например, для ступенчатой двухсоставной цилиндрической заготовки с диаметрами каждой цилиндрической части d 1 , d 2, учитывая, что момент инерции сплошного цилиндра равен 2
J = 0,5 mr (где m, r - масса и радиус цилиндра), а плотность заготовки р (кг/м3), получим для однокомпонентной заготовки при условии однородности материала:
2 ,2 .,2,2
п di di п d 2 d 2 р'п 44
J о = 0,5 р-4 ' 1 ' —+ 0,5 р-4- ' ( l - l i ) '— = ~[ d i l i + d 2 ' ( l - l i )] .
Для многокомпонентной двухсоставной заготовки получим , п d2 , d.2 nd22
Jо = ^ 8 li'T + р2 8 '(1 — '1)' 4 • где р1, р2 - плотности каждой части заготовки, кг/м3.
Тогда предельное значение окружной скорости и пред для однокомпонентной сплошной ступенчатой цилиндрической заготовки запишется в виде выражения:
и = Д [ d 2 l i + d 2_ - ( l - / 1 )] gd i2 sin g 6
^ Д h (2 d / [ d i li + d _ - ( / - / i )] + 4[ d/li + d _ - ( / - / i )])
а для многокомпонентной
и пред
= Д к
mgd i sin а б
7 2 / n d i . n d _ „
_ Д h md i + ( pi ——l +p2 —Z—- ( l - О
8 8
Моменты инерции могут быть определены и для других типов асимметричных заготовок. Например, для аналогичной однокомпонентной, но полой на всем протяжении заготовки с внутренним диаметром d 0, учитывая, что момент инерции полого цилиндра равен J = 0,5 m ( r 2 + r 2) (где
r - внешний радиус цилиндра; r 1 - внутренний радиус цилиндра):
J ц = 2 рп ' 1 '
V
л 4 d 0
а для многокомпонентной г 1 ,
J Ц = “P 1 n l 1 ’
2 I
d 4
1 п d 4
+ 4 p 4 n ( l - 1 1 ) • —
d 0 1
Если внутренняя полость находится только в зоне меньшего диаметра, то для однокомпонентной заготовки получим:
T 1 d d4 1 " / J d4 d 04 "I
JЦ = 4 Pnl1 • -4 + 4 Pn(l - l1) • J - J , а для многокомпонентной
J Ц =
( d 2
= 4 P 1 n 1 1 • d4 + 4 P 2 n ( l — 1 1) -I ^
^^^^H
d 0
Для трехсоставной заготовки, представляющей собой сначала цилиндр, который затем с помощью усеченного конуса переходит в цилиндр меньшего диаметра, получим для однокомпонентной заготовки: J ц = J ц1 + J yK + J ц2 . Учитывая, что момент инерции сплошного усеченного конуса -5 5w 3 3х-1
J = 0,3 m ( r\ - r 4 )( r 3 - Г 4 3) (где Г | , Г 4 — радиусы большего и меньшего оснований соответственно) и тонкостенного усеченного конуса - J = 0,3 m ( r 4 + rO') (где 1 ro - радиусы большего основания и внутренней полости по большему основанию) получим по аналогии выражения для определения момента инерции и тем самым для определения предельной окружной скорости по захвату.
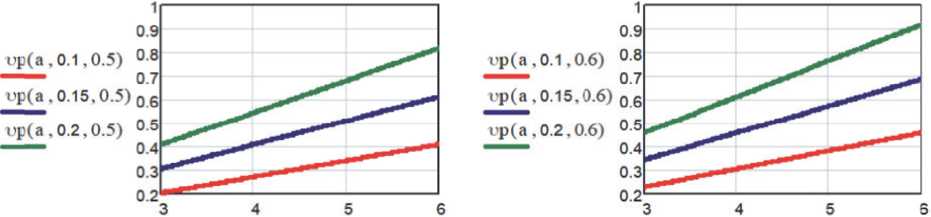
На рис. 4 приведены результаты математического моделирования предельной окружной скорости по захвату для однокомпонентной ступенчатой двухсоставной цилиндрической заготовки с диаметром d 1 = 0,014 м, плотность заготовки р = 8400 кг/м3. Варьирование осуществлялось по параметрам а = l / d 1, b = d 1 / d 4 и зазору в кармане Д к = 0,1 / ; 0,15 / ; 0,2 1 .
а б
Рис. 4. Графики зависимости предельной окружной скорости (м/с) при западании заготовок в карман закатыванием с поверхности обечайки (дна бункера) при b = 0,5 (а) и b = 0,6 (б)
С помощью графиков можно определить предельное значение окружной скорости захватывающих органов. Например, при а = 4 , Д к = 0,4 1 и b = 0,6 , получим и Пред = 0,61 м/с (см. рис. 4, б), а при тех же параметрах, но b = 0,5 , получим и Пред = 0,55 м/с (см. рис. 4, а).
ЗАПАДАНИЕ АСИММЕТРИЧНЫХ ЗАГОТОВОКВ ТАНГЕНЦИАЛЬНЫЕ КАРМАНЫ ПУТЕМ СКОЛЬЖЕНИЯ
Определение предельной окружной скорости карманов, имеющих фаску, при частичном отрыве асимметричной заготовки от стенок и фаски кармана при отсутствии трения, будет обеспечиваться по формуле :
и пред
0^^ + ( хс - 0,5 d^ ctg £ ) • cos £+ h sin £ c 1
g
\ dl + 2(xc - 0,5dictg£) • sin £ , где h – длина фаски, м [10].
На рис. 5 приведены результаты математического моделирования предельной окружной скорости по захвату для однокомпонентной двухсоставной асимметричной заготовки, один из торцов которой цилиндрический, а второй - в форме усеченного конуса, длина заготовки l = 0,03 м. Варьирование осуществлялось по параметрам а = d 1 / 1 , f = 1 1 / 1 = 0,5; 0,7; 0,9 и высоты кармана B = 0,4 d 1 ;0,5 d 1.
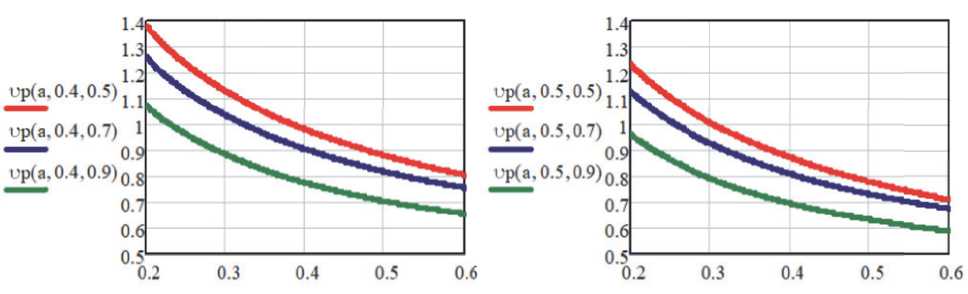
Рис. 5. Графики зависимости предельной окружной скорости (м/с) при западании заготовок в карман скольжением с поверхности обечайки (дна бункера) при B = 0, 4 d 1 (а) и B = 0, 5 d 1 (б)
С помощью графиков можно определить предельное значение окружной скорости. Например, при а = 0,4 , f = 0,5; и B = 0,4 d i , получим и Пред = 0,98 м/с (см. рис. 5, а), а при тех же параметрах, но B = 0,5 d i, получим и Пред = 0,87 м/с (см. рис. 5, б).
ЗАКЛЮЧЕНИЕ
Определение предельной окружной скорости захватывающих органов является необходимым этапом при построении математических моделей вероятности захвата асимметричных заготовок при описании производительности механических дисковых БЗУ. На значение предельной окружной скорости существенное влияние оказывают геометрические параметры заграждаемых заготовок и их соотношение друг с другом; размеры карманов и угол их расположения. Зазор между стенками кармана и расположившейся в них заготовкой оказывает наиболее существенное влияние на предельное значение окружной скорости карманов при их тангенциальном расположении, что обуславливает необходимость при проектировании обоснования рациональных параметров кармана при условии соблюдения стабильности функционирования БЗУ.
