Определение конструктивных параметров сепаратора зерна

Автор: Черняков А.В., Коваль В.С., Бегунов М.А., Евченко А.В., Павлюченко К.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки
Статья в выпуске: 6, 2017 года.
Бесплатный доступ
Послеуборочная обработка зерна является одной из наиболее ответственных и энерго-емких операций при его производстве. При анализе различных конструкций сепараторов можно сделать вывод, что перспективными являются зерноочистительные машины с криволинейной рабочей поверхностью, на ко-торой центробежные силы способствуют прохождению зерновой смеси через отвер-стия. Такая конструкция позволяет повысить просеваемость через решета за счет улучше-ния ориентирования зерновок относительно отверстий. Цель исследования: выявить ма-тематические зависимости для определения конструктивных параметров качающихся ре-шет и их привода. Задачи исследования: полу-чить математические зависимости рацио-нальных параметров подвесок из условия ра-ботоспособности механизма; выявить соот-ношения параметров привода сепаратора. Теоретические исследования процесса сепа-рации зерна на решетах с прямоугольными отверстиями, расположенными под углом к продольной оси решета, проводились приме-нительно к решетной установке. Были полу-чены системы уравнений движения одного ре-шета. На основе данной математической мо-дели была создана компьютерная имитацион-ная модель. В ней учтена возможность варьи-ровать такими конструктивными парамет-рами, как параметры решета, длины подвесов и угол размаха решет. Полученные зависимо-сти позволяют рассчитать кинематику ре-шет сепаратора и его конструктивные пара-метры. Для лабораторного образца они со-ставили: длина шатуна - 380 мм, кривошипа - 150, подвесок решета - 350 и перемычек - 30 мм. В случае разработки сепаратора про-мышленного масштаба эти размеры будут корректироваться, однако применяемые ма-тематические зависимости останутся преж-ними.
Решетный стан, зерно-очистка, решето, сепарация
Короткий адрес: https://sciup.org/14084931
IDR: 14084931 | УДК: 631.362.36
The definition of constructive grain separator parameters
After-harvesting processing of grain is one of the most responsible and energy-intensive opera-tions in its production. Analyzing various designs of separators, it can be concluded that grain cleaning machines with curved working surface on which the centrifugal forces facilitate the passage of the grain mixture through the holes are promising,. The de-sign allows increasing the sift through the sieve by improving the orientation of the grain relative to the holes. The purpose of the study was to find math-ematical dependencies for determining the design parameters of swinging sieves and their drive. The research tasks were to obtain mathematical de-pendences of the rational parameters of the sus-pensions from working condition of the mechanism; to reveal the relationship between the parameters of separator drive. Theoretical studies of the pro-cess of grain separation on sieves with rectangular holes located at the angle to the longitudinal axis of the sieve were carried out with reference to sieve installation. There were obtained the systems of equations of one sieve motion. Based on this mathematical model, a computer simulation model was created. It takes into account the possibility of such design parameters as the sieve parameters, the lengths of the suspensions and the angle of the sieve width to vary. Obtained dependences make it possible to calculate the kinematics of the separa-tor sieves and its design parameters. For the labor-atory sample they were connecting rod length (380 mm), crank (150), as well as the length of sus-pension sieves (350) and bridges (30 mm). In case of a commercial scale separator development these dimensions will be adjusted, but the applied mathe-matical dependencies will remain the same.
Текст научной статьи Определение конструктивных параметров сепаратора зерна
Введение. В настоящее время сбор зерна в стране несколько снизился по сравнению с предшествующими десятилетиями. Нынешним СПК и КФХ в наследство от предшествующих в р емен достались остатки сельскохозяйственной техники. Ввиду выработки этой техникой своего ресурса ее, конечно же, не хватает для обработки всех занятых угодий. В зернотоковом хозяйстве ситуация другая: в прошлом агрегаты и комплексы были рассчитаны на максимальные урожаи и объем посевных площадей. Их пропускная способность составляла 10, 20, 25, 40, 50 т/ч при нормированных показателях засорённости и влажности. Сейчас они остались незагруженными: либо работа осуществляется в одну смену или на неполной мощности. Кроме того, повысилась засоренность полей ввиду некачественной обработки и дороговизны применения средств химизации. Эти моменты создают противоречивые требования к работе комплексов, которые сводятся к следующим:
-
- обработка зерна с минимальным дроблением и повреждением;
-
- доведение зерна основной массы до продовольственных кондиций, а ее части – до семенных;
-
- зерно, соответствующее классу, намного дороже, чем бункерное;
-
- сушка, ввиду дороговизны мазута, теряет свою эффективность (имеется возможность перейти на местные более дешевые виды топлива: дрова, торф и т.д., однако их запасы также ограничены);
-
- техническое состояние машин для очистки и сушки зерна характеризуется как тяжелое;
-
- база для ремонта машин и оборудования зернокомплексов во многих хозяйствах практически отсутствует.
Таким образом, очистка и сортирование зерна являются актуальным вопросом, но возникают проблемы создания машин данного типа. Дальнейшее совершенствование существующих машин и создание новых требуют проработки теоретических вопросов процесса разделения зерна на фракции качественного семенного материала и фуража [1].
При анализе различных конструкций сепараторов можно сделать вывод, что перспективными являются зерноочистительные машины с криволинейной рабочей поверхностью, на которой центробежные силы способствуют прохождению зерновой смеси через отверстия.
Проводились исследования пневматического сепаратора для фракционного разделения и очистки зерна [2, 3]. Данная машина относится к области пневматического разделения зернового материала по аэродинамическим свойствам и размерам частиц. Область применения - предварительная и первичная очистка. Для получения качественных семян необходимы машины, удовлетворяющие критериям вторичной очистки.
Нами разработан сепаратор с качающимися рабочими органами, отверстия которых имеют продолговатую форму и располагаются под определенным углом α к движению зернового вороха (рис. 1).
Такая конструкция позволяет повысить про-севаемость через решета за счет улучшения ориентирования зерновок относительно отверстий [4].
Цель исследования. Выявить математические зависимости для определения конструктивных параметров качающихся решет и их привода.
Задачи исследования: получить математические зависимости рациональных параметров подвесок из условия работоспособности механизма; выявить соотношения параметров привода сепаратора.
Методы исследования. Проектирование кинематического механизма подвешивания решёт и его привода производилось для лабораторного образца (рис. 1) [5].
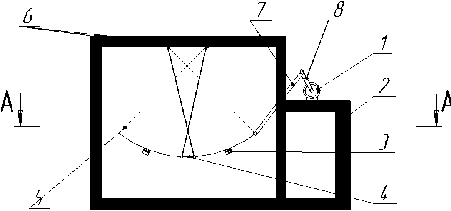
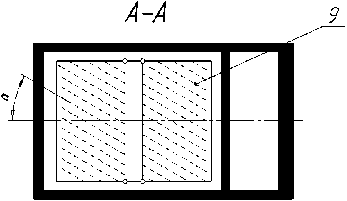
Рис. 1. Схема лабораторного образца машины для сепарации зернового вороха с качающимися рабочими органами:
1 – электрический привод; 2 – остов; 3 – очистители решёт; 4 – перемычки; 5 – подвески решета; 6 – крепления подвесок решета; 7 – шатун; 8 – кривошип; 9 – решето; α – угол наклона отверстий относительно образующей решета
Кинематическая схема предлагаемого технического решения (см. рис.1) для упрощения была разделена на три части: кривошип и шатун с коромыслами и два шарнирных четырехзвен ных механизма (решетного стана) (рис. 2).
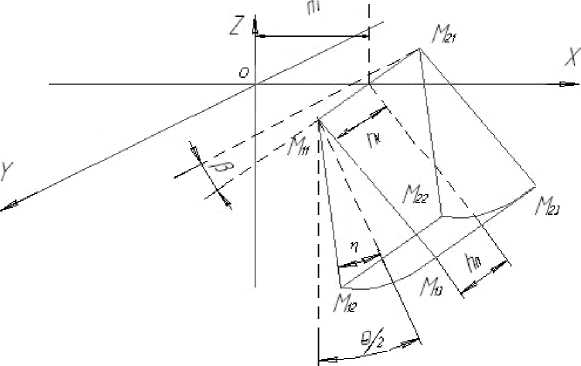
Рис. 2. Кинематическая схема решета
Ориентацию решетного стана в пространстве можно определить следующим образом:
-
- назначается угол наклона решета в горизонтальной плоскости β;
-
- назначается угол между креплениями подвески решета (линии M 11 M 12 , M 11 M 13 , M 21 M 22 , M 21 M 23 ) от оси симметрии (η);
-
- назначается угол отклонения решетного стана ( θ ), тогда изменяется угол оси симметрии решета от вертикальной оси ( θ );
-
- вычисляются углы отклонения крепления подвесок решета (линии M 11 M 13 , M 21 M 22 , M 21 M 23 ) от вертикальной плоскости:
-
- угол отклонения для левосторонних тяг
-
- вычисляется радиус r 1 при различных значениях плеч (верхне го – h v и нижнего – h n )
Л = Jr2 - (hv - hn) . (3)
Далее вычисляется значение угла отклонения тяг относительно вертикального положения при отклонении β=0
f i = h n - h v ; (4)
r 1
-
- определяются значения координат точек M 11, M 12 , M 13 , M 21 , M 22 , M 23.
Выражения для определения значения координат точек M 11, М 12 , M 13 , M 21 , M 22 , M 23 примут следующий вид:
Точка M 11
l =
θ - η 2
;
- угол отклонения для правосторонних тяг:
x = m ;
y11 = hv ⋅ cos( β );
θ + η
P = 2 ;
z11 = - hv ⋅ sin( β ).
Значения координат точек M 12 , M 13 рассчитываются в зависимости от координат точки М 11
x = x - r ⋅ cos( β - f ) ⋅ sin( l );
y 12 = y 11 - r ⋅ sin( β - fi );
z12 = z11 - r ⋅ cos( β - fi) ⋅ cos(l).
x 13 = x 11 - r ⋅ cos( β - fi ) ⋅ sin( p );
y 13 = y 11 - r ⋅ sin( β - fi );
z12 = z11 - r ⋅ cos( β - fi) ⋅ cos(p).
Таким же образом определяем значения координат точек M 21 , M 22 , M 23 .
Результаты исследования. На основании вышеизложенного выведены уравнения движения решетного стана. Принимая величину угла наклона решета β , расстояние между осями колебания подвесок решета +m для правого и – m для левого, значения угла отклонения решет- π ного стана относительно осей симметрии +
π для правого и - для левого, где k – коэффи-k циент отклонения, можно определить различные кинематические параметры. На основе полученной математической модели разработана имитационная модель. Данная модель позволяет изменять конструктивные параметры, а именно: параметры длины подвесов и значения угла отклонения решет.
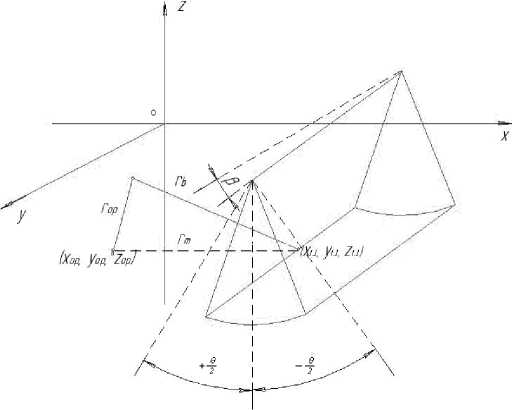
Рис. 3. Схема привода решета
Значения длины шатуна и кривошипа, подвесок решета и перемычек рассчитываются при использовании математической модели.
Для осуществления вышесказанного вычисляются значения координат точек фиксации ша- туна к решетному стану при его максимальных и минимальных отклонениях (xmax, ymax, zmax), (xmin, ymin, zmin)
θηπ xmax = m-r⋅cos(β- fi)⋅sin(- + + );
22 k
^ y max = hv ⋅ cos( β ) - r ⋅ sin( β - fi );
zmax =- hv ⋅ sin( β ) - r ⋅ cos( β - fi) ⋅ cos( - θ + η + π ).
22k
θηπ xmax =m-r⋅cos(β- fi)⋅sin( + + );
22 k
^ y max = hv ⋅ cos( β ) - r ⋅ sin( β - fi );
zmax =- hv ⋅ sin( β ) - r ⋅ cos( β - fi) ⋅ cos( θ + η + π ).
22k
Таким образом, минимальные и максималь- ному стану относительно оси вращения криво- ные значения точки фиксации шатуна к решет- шипа определяются
min

op y min max
max

x op ) + ( У max
y op min
- z op ) ;
— y ) + ( z — z ) 2 y op max op .
Значение длины кривошипа
Г — /' max min rop = о '
Значение длины шатуна r b r min r op .
Расстояние между осью вращения кривошипа и подвеской решета определяется rm = J(x13 - xop ) + (У13 - Уор ) + (z 13 - zop ) 2 . (13)
Выводы. Представленные выражения относятся к имитационной модели кинематики решетного стана сепаратора и дают возможность определить его конструктивные параметры. Для лабораторного образца они составили: длина кривошипа – 150 мм, шатуна – 380, подвесок решета – 350 и перемычек – 30 мм. В случае разработки сепаратора промышленного масштаба эти размеры будут корректироваться, однако применяемые математические зависимости останутся прежними.
Список литературы Определение конструктивных параметров сепаратора зерна
- Исследование процесса сортирования зер-нового вороха на коническом сепараторе на различных культурах/А.В. Черняков, К.В. Павлюченко, В.С. Коваль //Омский научный вестник. -2013. -№ 3. -С. 108-112.
- Черняков А.В., Павлюченко К.В., Коваль В.С. Пневматический сепаратор//Сельский механизатор. -2014. -№ 12. -С. 13.
- Исследование сепаратора зерна с наклон-ным воздушным каналом путем проведения планируемого эксперимента/А.В. Черня-ков, К.В. Павлюченко, В.С. Коваль //Омский научный вестник. -2015. -№ 2. -С. 95.
- Коваль В.С., Черняков А.В. Зерноочисти-тельная установка//Сельский механиза-тор. -2008. -№ 12. -С. 12-15.
- Патент на полезную модель 79011 РФ, МПК6 В07В 1/18. Решетный стан/А.В. Чер-няков, В.С. Коваль, А.В. Сухов. -№ 2008110154. -Заявл. 17.03.2008, опубл. 20.08.2008.
