Определение местоположения объекта с использованием улучшенной трехточечной пассивной системы

Автор: Лысый Николай Иванович, Звежинский Станислав Сигизмундович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 2, 2013 года.
Бесплатный доступ
Определение местоположения объекта осуществляется посредством пеленгатора Сайбеля с обработкой значений мощности сигнала в точках приема. Неоднозначность определения координат устраняется одновременным учетом временных и амплитудных параметров сигнала.
Координаты объекта, определение местоположения, пассивная система поиска, разностно-дальномерный метод, точка приема
Короткий адрес: https://sciup.org/14967145
IDR: 14967145
Текст научной статьи Определение местоположения объекта с использованием улучшенной трехточечной пассивной системы
А нализ исследований в области пассивной координато-метрии [1 – 7] позволяет выделить основные направления дальнейшего развития:
-
♦ определение координат объекта поиска (с учетом сферичности фронта распространения волны), обеспечивая уменьшение систематической погрешности;
-
♦ уменьшение неопределенности полученных координат объекта при решении системы нелинейных уравнений, описывающих его движение, исключение грубых промахов.
Как показывает опыт, для решения этих задач целесообразно применять разностно-дальномерный метод (РДМ) определения координат, в основе которого лежит измерение разности дальностей до пары точек приема (ТП). При этом имеются следующие особенности:
-
♦ используются пассивные точечные средства поиска (СП) или приемники, например, сейсмические;
-
♦ отсутствует априорная информация о параметрах сигнала и координатах объекта;
-
♦ определение координат обеспечивается для всех точек зоны чувствительности СП;
-
♦ возможна инвариантность топологии ТП на местности.
Общий алгоритм РДМ по определению местоположения предполагает отыскание корней системы нелинейных урав- нений, которые связывают ТП ‒ места установки СП (типично 3) с координатами объекта. Решение уравнений является сложной задачей, обычно не имеющей точного аналитического вывода. Из известных моделей РДМ, по мнению авторов, наиболее рациональным является пеленгатор Сайбеля, в котором в определенной степени устраняется неоднозначность определения координат объекта на линии пеленга за счет решения системы нелинейных уравнений гипербол [3]. Данная статья направлена в развитие этого метода.
Пусть в системе координат xOy линии гипербол заданы системой уравнений (1), описывающей положение объекта локации при использовании 3-х приемников с произвольной топологией ( рис. 1 ). Местоположение объекта (т. D ) определяется системой уравнений линий гипербол [3] и представляется в виде линии пеленга:
a1x2 + b1y2 + f1 = 0;
a2x2 + b2y2 + c2xy + d2x + + e2y + f2 = 0; (1) a3x2 + b3y2 + c3xy + d3x + e3y + f3 = 0, где an, bn, fn (n = 1, 2, 3): cm, dm, em (m = 1, 2) – параметры гипербол, связывающие неизвестные значения координаты т.D (объект) с известными координатами тт. А, В, С (ТП) и измеренными значениями разностей дальностей ∆rAB, ∆rAC, ∆rBC.
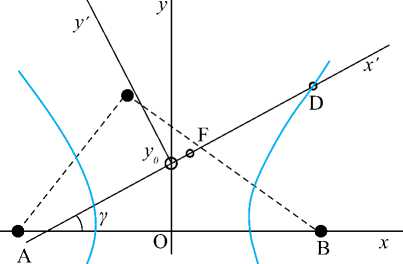

Рис. 1. Задача по определению координат объекта
Система уравнений (1) рассматривается как базовая модель для получения 3-х линий пеленга при использовании 4-х приемников, решения – суть несколько корней (до 4-х), среди которых есть истинные координаты объекта т. D . Для их определения достаточно использовать 3 приемника, вычисляя разности дальностей до объекта, на их основании строя линии гипербол и линию движения (пеленга) объекта локации. Пусть эта линия пересекает ось Ох под углом γ (пеленг объекта) и проходит через точку наблюдения F(xF, yF) , имеющую координаты:
y = y 0 + x×tgγ , (2)
где y0 – ордината пересечения линией пеленга оси Оу .
Найдем координаты точки, являющейся пересечением линии гиперболы и прямой. При одновременном перенесении начала системы координат в точку Y0(0,y0) и повороте координатных осей на угол γ ( рис. 1 ), система уравнений (1) представима в виде:
Таким образом, на основе РДМ и с учетом технического решения [3] разработана модель определения координат объекта в виде уравнений (4 – 6). Модель позволяет получить точное аналитическое решение системы гиперболических уравнений определения координат объекта триадой приемников при отсутствии итерационных процедур (которые делали ранее невозможным обработку значительного потока данных в масштабе реального времени). При этом снято ограничение на топологию ТП и применен пеленг, однозначно определяющий местоположение объекта.
Это позволяет найти точки пересечения линии пеленга и линии гиперболы, что отличает эту модель от известных, где местоположение рассматривается как пересечение двух гиперболических линий. При этом с 4 до 2 уменьшено количество точек возможного местоположения объекта по сравнению с известными методами определения координат в [5, 6]. Решениями уравнения (4) являются два значения дальности, из которых одна – истинная. На рис. 2 показана неоднозначность при определении координат объекта – обе точки D1 , D2 являются решениями (3). При этом в зависимости от топологии триады ТП и величины пеленга возможно определить одно истинное значение дальности.
Например, для прямоугольной равнобедренной топологии при условии, что расстояние от точки наблюдения до объекта значительно превышает базу триады, т.е. L1 , L2 > a , то угол пеленга γ ≈ ±45˚ является границей перехода определения дальности по показателю L1 к показателю L2 при положительных значениях пеленга. Полученное значение дальности (от точки наблюдения) для малобазовых систем поиска практически совпадает с дальностью до объекта из центра координат. При определенном пеленге на объект, находящийся на расстоянии, значительно превышающем базу а , однозначное решение координатометричной задачи находится путем сопоставления угла пеленга с секторами определения дальности.
При нахождении объекта вблизи триады ТП ширина сектора определения параметров L1 или L2 существенно изменяется, что приводит к необходимости уменьшения неоднознач-
(x’)2 (acos2γ – sin2γ) – (x’)2y0 sinγ – y02 + f1 = 0 . (3)
Выражение (3) позволяет в системе координат x’O’y ’ определить координаты точки пересечения линий положения объекта при условии x’ = L и получить уравнения, описывающие координаты объекта. Расстояние от точки наблюдения (пересечения пеленгом оси ординат Y0(0, y0) ) до объекта есть:
_ y0 siny ± Ajy0 sin у — (ax cos" у — sin у)(— y0) .
(a, cos у - sin у)
Угол пеленга объекта
γ = arctg((2a×∆rAC – (a + x3)×∆rAB)/(y3×∆rAB)), (5)
где a = |AB|×½ – база точек приема; x3, y3 – координаты точки приема C( x3, y3 ).
Ордината пересечения линии пеленга и оси ординат yn - У, хДеу - ^ + Гдс X Гдв "" Г4С "" a . (6)
Ун AFvbi
2y3
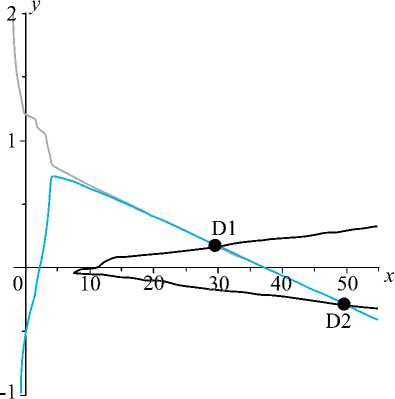
Рис. 2. Неоднозначное определение дальности до объекта
ности решения. Например, характерным является наличие двух решений при пеленге на объект (с центра координат) в интервалах –30…0 и 60…90 град. Следует отметить, что значения L1 или L2 могут быть со знаком минус, что указывает на нахождение объекта во II или III координатном углу.
Поскольку физическая природа параметров мощности и разности дальности ‒ разная, возможно составить уравнение для оценки, например, параметра радиуса окружности линии положения объекта Lp , при этом в уравнение будут входить показатели времени и мощности сигнала. При этом в соответствии с рис. 3
i?„=(X-xcy+Y;,
где Xj , Lp – абсцисса центра и радиус окружности как линии положения объекта, определенные по параметру мощности сигнала в двух точках приема [4]:
P р„-рь ’ ' P„-Pb
где Pa , Pb – мощности принятого сигнала двумя разнесенными точками приема A (– a ,0), B ( a ,0).
Рассмотрим дополнительно измерение параметра мощности сигнала в 2-х ТП. Координаты объекта связаны с расстоянием L1 или L2 , полученными по (4), выражениями
По критерию (11) выбираем одну из дальностей, для которой квадрат разности расстояний будет наименьшим, – это значение и будет истинным, а решение – однозначным.
Таким образом, улучшенная трехпозиционная пассивная система определения координат объекта обеспечивает:
-
1) определение пеленга триадой ТП произвольной топологии (2 решения);
-
2) выбор искомого решения как координаты точки пересечения линий гиперболы и пеленга, которые являются линиями положения объекта;
-
3) инвариантность расчетов к топологии точек приема;
-
4) комплексное измерение временных и амплитудных параметров сигнала.
При этом регистрируемыми параметрами являются мощность сигнала и величины временной задержки распространения волны между ТП.
Описанная система поиска отличается от известных тем, что снимаются ограничения на топологию 3-х ТП, а полученные аналитические зависимости обеспечивают однозначное определение координат за счет комплексного контроля временных и амплитудных параметров сигнала. Использование этого «улучшенного» РДМ позволяет повысить эффективность контроля перемещения объектов, в том числе допускает инвариантность топологии точек приема, и исключает грубые промахи из-за имевшейся ранее неоднозначности определения координат ■
Xc = L1(L2)cosγ, Yc = y0 – L1(L2) sinγ.
Истинным будет такое значение L1 или L2 , при котором различие между определением показателя Lp по параметрам мощности и разности дальностей будет минимальным:
^1 = |^ - (xi - L^ cos( У)2 - (A sin(У) + Vo )21 (9)
N2 =\l2„- (X, - Z2cos(7)2- (Z2sin(7) + Jo)2| , (10)
где N1 , N2 – модуль разности квадратов радиусов окружностей как линий положения объекта, определенных по параметрам времени и мощности.
Критерием однозначности определения координат будет решение системы:
Lt при Nt< Nt, L, при N, < Nv
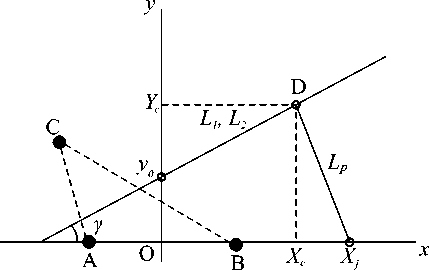
Рис. 3. Однозначное определение координат объекта
Список литературы Определение местоположения объекта с использованием улучшенной трехточечной пассивной системы
- Большаков В.Д. Радиогеодезические и электрооптические измерения./Учебник для вузов В.Д. Большаков [и др.]. -М.: Недра, 1985.
- Антонюк В.П. Шляхи пiдвищення ефективностi пасивних гiперболiчних систем/В.П. Антонюк./Вiсник НУ «Львiвська полiтехнiка»; ред. З.Г. Пiх. -Львiв: НУ «ЛП», 2009. -№ 645.
- Разностно-дальномерный способ пеленгования источника радиоизлучения и реализующее его устройство: Патент RU № 2258242, МПК G01S3/46. -ФИПС, оп. 20.02.2005.
- Дальномерно-разностный способ определения координат источника радиоизлучения и реализующее его устройство: Патент RU №2363010, МПК G01S3/46. -ФИПС, оп. 27.07.2009.
- Mizusawa G.A. Performance of hyperbolic position location techniques for code division multiple access. -Blacksburg, Virginia: Electrical Enginttring, 1996.
- Прокина Н.В. Пеленгация наземных объектов с использованием сейсмических датчиков/Н.В. Прокина, В.А. Дудкин./Датчики и системы; под ред. В.Ю. Кнеллер. -М.: ИПУ РАН, 2010. -№ 1.
- Орлов В.В. Методы синтеза и анализа компьютеризированных систем адаптивного обнаружения и распознавания объектов акустического излучения в условиях кратковременных помех: автореферат дис. канд. тех. наук/В.В. Орлов. -Киев, 2011.
