Определение параметров гидроударников ковша

Автор: Жданов А.В., Летопольский А.Б., Тетерина И.А.
Рубрика: Расчет и конструирование
Статья в выпуске: 2 т.25, 2025 года.
Бесплатный доступ
Задачу разработки мерзлого грунта в стесненных условиях, на площадках с небольшим фронтом работ и на участках вблизи промышленных и гражданских объектов можно решить, оснастив экскаватор сменным оборудованием гидромолота (для подготовки грунта к разработке) и ковша активного действия с гидроударниками (для непосредственной разработки). Эффективность работы этих машин объясняется тем, что часть мощности передается непосредственно на рабочий орган, минуя промежуточные звенья. Предложен вариант совершенствования ковша экскаватора путем добавления в конструкцию двух гидроударников. В статье содержится общий вид в двух проекциях усовершенствованного рабочего оборудования. Также в статье представлена гидравлическая схема гидроударников модернизированного рабочего оборудования. Оснащение экскаватора сменным оборудованием в виде ковша активного действия сохраняет все возможности базовой машины: универсальность, мобильность, маневренность, автономность. Перед проведением работ по имитационному моделированию необходимо провести ряд теоретических исследований, позволяющих определить основные параметры гидроударника ковша активного действия. Это стало целью проведения данных теоретических исследований. Приведены численные выражения для определения таких параметров, как диаметр штока, длина устройства запорно-регулирующего устройства, площадь проходного сечения, максимальный диаметр камеры управления, объем камеры управления, давление на выходе из насоса. В результате проведенных теоретических исследований был построен ряд графических зависимостей, позволяющих установить взаимосвязь параметров. В качестве примера в статье представлена графическая зависимость частоты ударов бойка от расхода насоса при изменении диаметра настроечного дросселя. Исследования показали работоспособность конструктивных схем предлагаемых конструкций гидроударных устройств.
Экскаватор, гидроударник, ковш активного действия, мерзлый грунт, сменное рабочее оборудование
Короткий адрес: https://sciup.org/147252218
IDR: 147252218 | УДК: 626.226 | DOI: 10.14529/engin250202
Determination of the parameters of a hydraulic hammer bucket
The task of developing frozen soil in cramped conditions, on sites with a small work source and on sites near industrial and civil facilities can be solved by equipping the excavator with replaceable hydraulic hammer equipment (for preparing the soil for development) and an active bucket with hydraulic hammers (for direct development). The efficiency of these machines is explained by the fact that part of the power is transmitted directly to the working element, bypassing intermediate links. A variant of improving the excavator bucket by adding two hydraulic hammers to the design is proposed. The article contains a general view in two projections of the improved working equipment. The article also presents a hydraulic diagram of the hydraulic hammers of the modernized working equipment. Equipping the excavator with replaceable equipment in the form of an active bucket preserves all the capabilities of the base machine: versatility, mobility, maneuverability, autonomy. Before carrying out the work on simulation modeling, it is necessary to conduct a number of theoretical studies to determine the main parameters of the hydraulic hammer of the active bucket. This became the purpose of conducting these theoretical studies. Numerical expressions are given for determining such parameters as the rod diameter, the length of the shut-off and control device, the flow area, the maximum diameter of the control chamber, the volume of the control chamber, and the pressure at the pump outlet. As a result of the theoretical studies, a number of graphical dependencies were constructed that allow establishing the relationship between the parameters. As an example, the article presents a graphical dependence of the striker strike frequency on the pump flow rate when changing the diameter of the adjustment throttle. The studies have shown the operability of the design schemes of the proposed designs of hydraulic impact devices.
Текст научной статьи Определение параметров гидроударников ковша
Механизация строительства способствует повышению производительности труда, качества строительных работ и увеличению темпов. Одним из перспективных направлений разработки мерзлых грунтов остается ударное разрушение с помощью рабочих органов активного действия. Наиболее целесообразным в этом вопросе представляется использование ударных устройств в качестве сменного оборудования к базовым машинам, например, к экскаваторам с гидроприводом [1–3].
Сменное оборудование с ковшом активного действия значительно увеличивает производительность по сравнению с традиционными способами разработки грунтов. Ковш позволяет с достаточной точностью разрабатывать дно и откосы котлованов и траншей, допускает проведение работ в черте города, в стесненных условиях строительных площадок и действующих объектов [4, 5].
В связи с перспективностью разработок конструкций рабочих органов с гидроударными элементами актуальность представленных в данной статье исследований подтверждается в полной мере.
Основная часть
Для оптимизации рабочего процесса и сокращения времени, затрачиваемого на смену рабочего оборудования, предложена усовершенствованная конструкция рабочего органа одноковшового экскаватора. Конструкторское решение объединяет в себе ковш и два гидроударника, расположенных на торцевой стороне ковша [6]. Общий вид рабочего органа представлен на рис. 1.
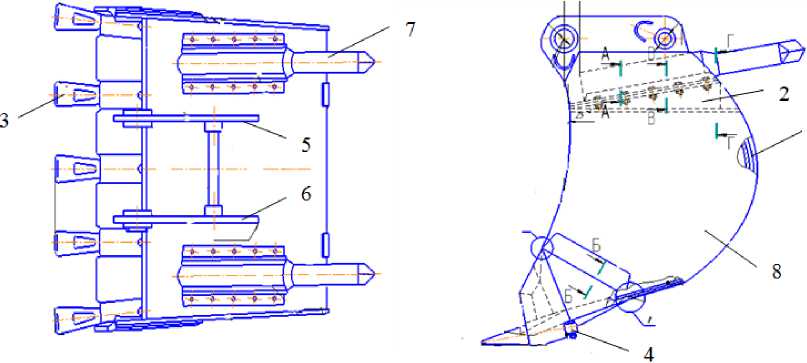
Рис. 1. Ковш с 2 гидроударниками: 1 – вид сверху; 2 – вид сбоку
Fig. 1. Bucket with 2 hydraulic hammers: 1 – top view; 2 – side view
Предлагаемый вариант рабочего оборудования включает в себя: 1 – задняя стенка; 2 – подставка под гидроударник; 3 – зуб; 4 – кронштейн зуба; 5 – кронштейн левый; 6 – кронштейн правый; 7 – гидроударник; 8 – стенка боковая (правая).
На рис. 2 представлена гидравлическая схема гидроударников модернизированного рабочего оборудования.
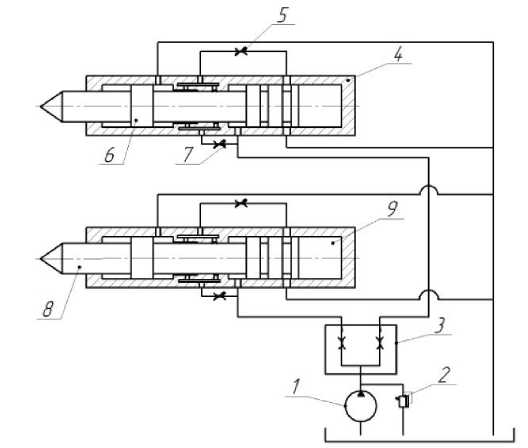
Рис. 2. Гидравлическая схема гидроударников ковша Fig. 2. Hydraulic diagram of bucket hydraulic hammers
Гидравлическая схема включает в себя: 1 – насос; 2 – предохранительный клапан; 3 – делитель потока; 4 – корпус; 5, 7 – регулировочные дроссели; 6 – поршень-боек; 8 – гидроударник; 9 – пневмоаккумулятор [7].
Методы исследования
Цель данного исследования – повышение эффективности рабочего оборудования экскаватора за счет оснащения ковша гидроударными устройствами.
Для подтверждения работоспособности предлагаемого оборудования и определения его параметров был проведен расчет параметров гидроударника и самого рабочего оборудования экскаватора.
Давление на выходе из насоса определяется по формуле
Pn = н I ж ∙ взд , (1)
где
>= + caR2 + (вср ж
b= ^3 V + взд , где ^a – давление зарядки аккумулятора; \взд – скорость взвода бойка; pж – плотность рабочей жидкости, Xp – длина разгона, ^a – коэффициент жесткости аккумулятора [8]:
r2 = + 0,95nlkpn2D2 ;
R3 = + 0,95nlkpn3D3 ;
Ri = + 0,95n:lkpn1D1 ;
Bн= 1+^ a нн+ ( нк нв ;

где Rs – коэффициент соотношения площадей = ^b / Pa = 0,25; Sb – площадь сечения бойка; Sa – площадь сечения аккумулятора; Iй – коэффициент трения колец о стенки цилиндра [9]:
, _ 1,6Pg a=,
лр где A – коэффициент гидравлического трения; dн=dcл – диаметр нагнетательной и сливной гидролиний (0,025 м); Iн иIсл – длины нагнетательной и сливной гидролиний (10 м); fн – коэффициент местных сопротивлений в нагнетательной линии; fсл– коэффициент местных сопротивлений в сливной линии; 5н=Sсл – площадь сечения шлангов нагнетательной и сливной гидролиний; ^k ,n,D – соответственно длина контакта, число и диаметр колец уплотнения (l^ = 0,003 м; nl , П2 , П3 =2;d2 =9·10 ’3 м, Di = =3,8·10 ’3 м.
Скорость взвода бойка определена из условия одновременной работы трех ударников от одной секции сдвоенного насоса экскаватора при нормальной подаче 2,7·10–3 м3/с по формуле [10, 11]
^взд =
(о,8-0,85) Q
3(^+lf∙cпр
где C пр – приведенный коэффициент упругости рабочей жидкости, шлангов и цилиндра 1,3·10–11 м5/Н; Q – подача насоса, м3/с.
При расчетах необходимо достигнуть выполнения условия, при котором давление на выходе из насоса не превышает номинального значения в гидроприводе [12].
Необходимо определить ширину кольцевой проточки слива из упругого запорно-регулирующего элемента. Ширина кольцевой проточки определена по формуле [13, 14].
______ть ∙ V взд Sa [ 2Pa~RS ( P в -P с )] ,
где P^b – масса бойка; I в – давление на выходе из насоса; Ra – максимальное давление в аккумуляторе; I сл – давление на сливе, равное
P сл

^сл
_^ ∙ p ж 3∙2∙ S сл
Диаметр штока определен из выражения
= ц nd шт
Rs \ 4 4 ;
шт =

45g∙ Rs
П
где d ц – диаметр цилиндра.
Для снижения потерь давления в гидроцилиндре при протекании рабочей жидкости из взводящей полости в переливную необходимо определить площадь сечения переливных отверстий, исходя из максимальной скорости бойка при разгоне [15].
Расход на перетечки жидкости определяется уравнением
$a ∙ Rs ∙ vр+| к = Qn , (14)
где Q к – расход через кольцевую щель, образованную упругим запорно-регулирующим элементом и цилиндром устройства; Vр – скорость разгона бойка [15].
Площадь проходного сечения найдена из условия максимально допустимой скорости течения жидкости Vдоп = 6 м/с, тогда
5=
° V доп
Из условий прочности резины при давлении 16 МПа известно: диаметр каждого отверстия не должен превышать 3 мм.
Число отверстий определено по формуле [16, 17]
n= , ,
где d0 – диаметр отверстия упругого запорного элемента.
Площадь упругого запорно-регулирующего элемента определена из условий, что площадь отверстий занимает 0,1 от площади запорно-регулирующего устройства (из технологических возможностей). Поскольку площадь проходных отверстий одинакова для входящей и переливной полостей, то площадь упругого запорно-регулирующего элемента определена из соотношения
S у =20∙ So ․
Длина устройства упругого запорно-регулирующего элемента определена из соотношения [18]
I = у , nd у ,
где d у – диаметр камеры управления.
Для определения частоты работы гидроударного устройства необходимо определить время для каждой фазы рабочего цикла гидроударного устройства [16].
Фаза взвода бойка
_ v взд( Sb+^ ∙Cпр)
c взд= (0,8-0,85) Qn ,
где c пр – приведенный коэффициент жесткости.
Время перекрытия упругого запорно-регулирующего элемента определяется эмпирической формулой tп =(1,2-1,3) ∙7ку , (20)
где V ку – объем камеры управления:
Vk у

d у +2tузр 2
+Dk у ) (“ у узр

где l – длина упругого запорно-регулирующего элемента; t узр – толщина упругого запорно-регулирующего элемента; D^ у – диаметр камеры управления.
Подставив значение Vку в формулу, можно определить время перекрытия упругого запорно-регулирующего элемента кольцевой щели.
Время торможения бойка определено по формуле
_____2∙ т б , ∙ V взд
Sa [ 2Pa~Rs ( Р в -Р сл )]
Время рабочего хода (разгон-удар) составляет 0,1–0,12 c.
Таким образом, время цикла определяется из формулы [19]
= взд +t п )
ц = (о,9/О,88) ․
Частота ударов определена уравнением [20, 21]

В качестве примера, как результат проведенных теоретических исследований, представлена графическая зависимость частоты ударов бойка от расхода насоса при изменении диаметра настроечного дросселя (рис. 3). Данный параметр выбран исходя из того, что он главным образом оказывает влияние на производительность машины.
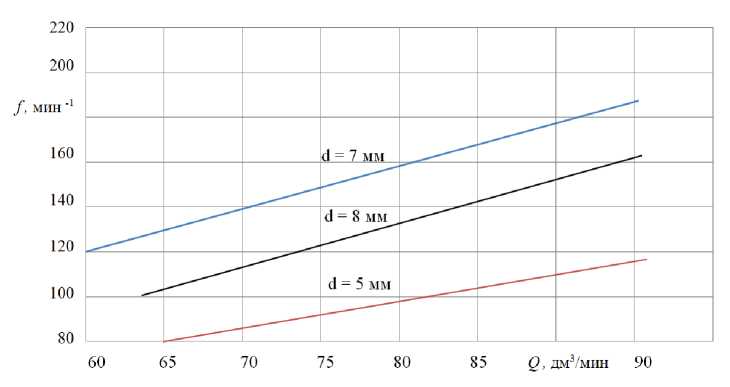
Рис. 3. Зависимость частоты ударов бойка от расхода наноса при изменении диаметра настроечного дросселя
Fig. 3. Dependence of the striker strike frequency on the pump flow rate when changing the diameter of the adjustment throttle
Из анализа представленных графических зависимостей видно, что при данных конструктивных параметрах минимальное время цикла (минимальная частота ударов) зависит практически только от расхода жидкости. Изменить (уменьшить) частоту ударов при полном ходе бойка можно путем изменения проходного сечения настроечного дросселя. Кроме этого, дросселем можно добиться обеспечения вибрационного режима работы ударника при неполном ходе бойка.
Заключение
В результате проведения теоретических исследований были получены расчетные зависимости для определения конструктивных параметров гидроударников ковша активного действия и получена расчетная зависимость определения частоты ударов бойка гидроударника.
Необходимо отметить, что представленные расчетные зависимости дают возможность определить основные параметры гидроударных механизмов для ударных рабочих органов не только ковша активного действия, но и, например, гидромолота.
