Определение равномерности хода машины по ширине захвата наземным способом и с помощью БВС

Автор: Фокин Александр Михайлович, Курбанова Елена Сергеевна
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Технологии, машины и оборудование для агропромышленного комплекса
Статья в выпуске: 1 (38), 2023 года.
Бесплатный доступ
Показали возможность использования технических средств для оценки проведения технологических операций по обработки почвы наземным и дистанционным способом. (Цель исследования) Провести сравнительный анализ наземных и дистанционных измерений с помощью БВС при определении равномерности хода машины по ширине захвата. (Материалы и методы) Изучили инструментарий дистанционных и наземных измерений. Применяли результаты научных исследований по определению равномерности хода машины по ширине захвата, согласно методике ГОСТ 33736-2016. (Результаты и обсуждение) Проанализировали возможность определения равномерности хода машины по ширине захвата наземным и дистанционным способом. Рассчитали коэффициент вариации наземных и воздушных измерений - 12% и 15% соответственно, воздушные измерения являются достовернее. Определили, что воздушные измерения позволит исключить субъективную оценку при выполнения технологической операции. (Выводы) Разработали алгоритм определения равномерности хода машины дистанционным спобосом, учитываюищй параметры наземных измерений.
Беспилотное воздушное судно, дрон, аэрофотосъемка, обработка почвы, равномерность хода машины
Короткий адрес: https://sciup.org/147240745
IDR: 147240745 | УДК: 631.3-58
The uniformity determination of the machine stroke along the width of the grip by ground method and with the help of the UAV
The possibility of using technical means to assess the implementation of technological operations for land tillage and remote method has been showed. (Purpose of the study) The comparative analysis of ground and remote measurements with the help of UAV in determining the uniformity of the machine's stroke across the working width has been conducted. (Materials and Methods) The toolbox of remote and ground-based measurements has been studied. The results of scientific research has been applied to determine the uniformity of the machine's stroke across the working width, according to the method of GOST 33736-2016. (Results and discussion) The possibility of determining the uniformity of the machine in terms of working width by ground and remote method is analyzed. The coefficient of variation, deviation of the working width from the design width and the standard deviation has been calculated. The coefficient of variation of ground and air measurements has been calculated - 12% and 15% respectively, air measurements are more reliable. It has been determined that aerial measurements will eliminate subjective evaluation when performing technological operations. (Conclusions) The algorithm for determining the uniformity of machine movement by remote method, taking into account the parameters of ground measurements has been developed.
Текст научной статьи Определение равномерности хода машины по ширине захвата наземным способом и с помощью БВС
Земельные ресурсы являются важным средством сельскохозяйственного производства. Для успешного возвращения запущенных и деградированных угодий предусмотрено применение специализированных технологических комплексов.
Равномерность хода мобильного агрегата при выполнении технологических операций по обработки почвы является важнейшим параметром высокопроизводительного использования машинно-тракторных агрегатов, что достигается при определенных значениях мощности двигателя, массе и скорости движения.
Ширина захвата мобильных агрегатов при выполнении технологических операций по возделыванию и уборке сельскохозяйственных культур является важнейшим параметром высокопроизводительного использования машинно-тракторных агрегатов, что достигается при определенных значениях мощности двигателя, массе и скорости движения.
Скорость движения МТА устанавливается относительно выполнения качества работы, однако во многих случаях скорость, определяемая энергонасыщенностью агрегата, не может быть реализована ввиду агротехнических ограничений, и тогда определяющим критерием, отражающим всю совокупность факторов, действующих при — приведенные издержки на единицу площади.
Целесообразность использования технических средств зависит от достоверной оценки состояния запущенных земельных ресурсов, которое оценивается комплексом показателей, важнейшими из которых является твердость, плотность, влажность, степень задернелой почвы, толщина задерненного слоя, микрорельеф, растительные остатки, травянистая и древесная растительность.
Материалы и методы: Исследования проводились с использованием БПЛА DJI Matrice 200 v2, мультиспектральной камеры Micasense Altum, и мультичастотного GNSS приемника EMLID Reach RS2 (Рисунок 1). После каждого полета собранные данные обрабатывались с помощью программного обеспечения Pix4Dmapper и Agisoft Metashape [1]. В процессе обработки создавались: ортофотоплан, цифровая модель местности (ЦММ) и цифровая модель поверхности (ЦМП) [2].

Рисунок 1. БПЛА DJI Matrice 200 v2 с мультиспектральной камеры Micasense Altum
Также было применено наземное оборудования такое как, рулетка, линейка металлическая, весы, рамка деревянная размером 100 см х100 см, комплект почвенных решет с погрешностью измерения + 1 см, весы, рамка 0,5х0,5 м.
Отклонение рабочей ширины захвата (фактической) от конструкционной, %, вычисляют по формуле:
∆B = Bф-Bк ∙ 102, Bк ,
где B ф – рабочей ширины захвата (фактическая), м;
B к – конструкционная ширина захвата, м;
∆B –отклонение рабочей ширины захвата от фактической.
Среднего арифметическое выборки значения:
∑B ф
Bср = N ,
где ∑B ф – сумма рабочей ширины захвата, м;
N – количество измерений, м;
B ср –среднее арифметическое выборки значение.
Таким образом найденное среднее арифметическое значение выборки позволит произвести расчет стандартного отклонения:
^∑(X 1…50 -B ср )2 σ= N ,
где Xi– разницу выборки и среднего значения, м;
N - количество измерений, м;
В Ср -среднее арифметическое выборки значение, м.
Для того чтобы узнать на сколько вариабельной является выборка в данном исследование произведен расчет коэффициента вариации, согласно которому выборка имеет градацию в процентном соотношении: при <10% выборка слабо вариабельна, при 10% - 20 % — средне вариабельна, при >20 % выборка сильно вариабельна.
V = -^ • 100%, (4)
Bср где V - коэффициент вариации, м;
о - стандартное отклонение, м;
В ср -среднее арифметическое выборки значение.
Результаты и обсуждения:
В условиях производственной эксплуатации неравномерность хода машиннотракторного агрегата (МТА) по ширине захвата, способствует потере технологических качеств современного оборудования, что приводит к не рациональному использованию. В результате снижается эффективность машинно-тракторного парка, повышается себестоимость производимой сельскохозяйственной продукции, нарушаются требования экологии. Для устранения этих ошибок следует обратить внимание на правильность выполнения операций равномерности хода машинно-тракторного агрегата (МТА) по ширине захвата [3].
Рабочую ширину захвата плуга определяют по двум проходам в 50 точках, расположенных с интервалом не менее 1 м по ходу движения агрегата на каждом учетном проходе. Для этого перед учетным проходом агрегата устанавливают 50 кольев на расстоянии от обреза стенки борозды равном ширине захвата плюс 1 м. После учетного прохода агрегата проводят измерения от каждого колышка до обреза борозды.
Число измерений - не менее 50. Погрешность измерений - ±1 см.
Рабочую ширину захвата вычисляют по разнице измерений до прохода и после прохода агрегата. Полученные данные обрабатывают статистическим методом с получением среднеарифметического значения ширины захвата, стандартного отклонения и коэффициента вариации. Вычисления проводят с округлением до первого десятичного знака.
Допускается определение рабочей ширины захвата при помощи маркера, присоединяемого к заднему корпусу плуга. Для этого измеряют расстояние между двумя смежными линиями, прочерченными маркерами при двух смежных проходах.
Для определения равномерности хода машины по ширине захвата с помощью БВС, была осуществлена аэрофотосъемка с мультиспектральной камерой исследуемого участка, после вспашки и составлена Цифровая модель поверхности с отмеченной на ней через 1 метр учетные линии для измерения ширины захвата (Рисунок 2).
Цифровая модель поверхности - это цифровое представление участка земной поверхности, полученное путём обработки материалов аэрофотосъемки (топографической съёмки), и передающее точные данные о высоте земной поверхности, включая здания, растительность и любые другие высотные (вертикальные) объекты, которые присутствовали на момент съёмки [4].
В программе Agisoft Metashape по данным аэрофотосъемки были построены цифровая модели поверхности (ЦМП). ЦМП передает точные данные о высоте земной поверхности, точное расстояние до объекта растительность и любые другие высотные (вертикальные) объекты, которые присутствовали на момент съёмки [5]- [6].
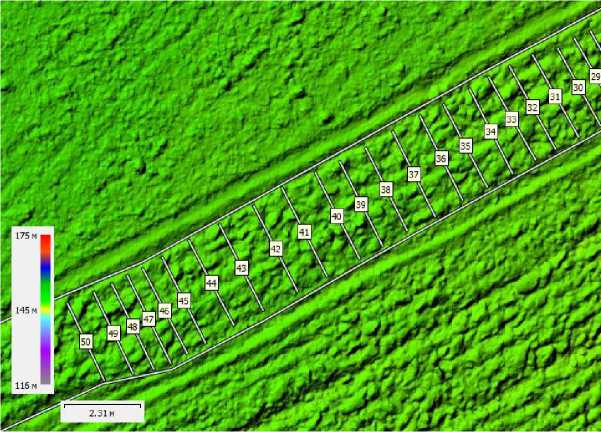
Рисунок 2 – ЦМП с учетные линии для измерения ширины захвата
Сравнительный анализ ЦМП поля показал, что поверхность поля имеет наиболее ровный рельеф на всей площади и имеет минимальный естественный уклон [7].
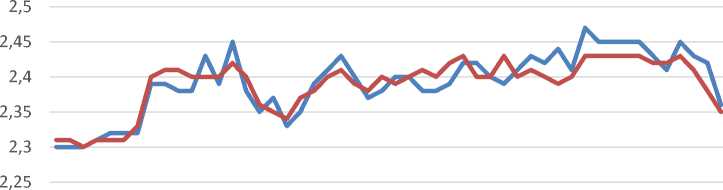
На основании контрольных наземных и дистанционных измерений построен график, точности данных измерений (Рисунок 3).
На данном графике на осе абсцисс обозначено количество проводимых замеров в данном исследовании, а на оси ординат отмечен диапазон ширины захвата начиная от конструкционной ширины захвата, которая составляет 2,30 метра до максимальной фактической при выполнении вспашки.
2,2
1 8 15 22 29 36 43 50
^^^^^™ Наземные измерения
^^^^^™ С помощью БВС после фотограмметрической обработки
Рисунок 3 – Значения проведенных исследований определения равномерности хода машины по ширине захвата
На основе данных воздушных и наземных измерений, рассчитаны такие критерии как: сумма ширины захвата, среднее арифметическое значение, стандартное отклонение коэффициент вариации и отклонение рабочей ширины захвата (фактической) от конструкционной (Таблица 1) [8].
Таблица 1 – Сравнительные статистические данные наземных и воздушных измерений
|
Измерение |
Расстояние до маркера или расстояние от колышков до обреза борозды, после прохода |
Рабочая ширина захвата |
Результаты воздушных измерений с помощью БВС |
|
Сумма |
119,6 |
115 |
119,44 |
|
Ср. арифметическое значение |
2,39 |
2,30 |
2,38 |
|
Стандартное отклонение, ± м |
0.31 |
- |
0,38 |
|
Коэффициент вариации, % |
12 |
- |
15 |
|
Отклонение рабочей ширины захвата от конструкционной, % |
3,9 |
- |
3,4 |
Разработан алгоритм определения равномерности хода машины по ширине захвата дистанционным способом (Рисунок 4). Исследования в направлении создания новых принципов мониторинга почвы, которые основаны на бесконтактных методах, позволят обеспечивать сельхозпроизводителей качественной и количественной оценкой физикомеханических и агротехнических свойств почвы, оценивать состояние сельхозкультур, и контролировать технологические операции.
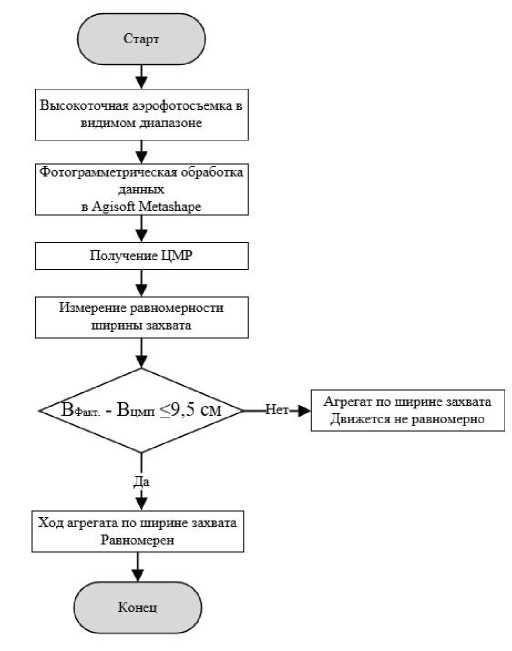
Рисунок 4 – Алгоритм определения равномерности хода машины по ширине захвата
Получение зависимостей между результатами дистанционных измерений и наземными исследованиями позволит оперативно оценивать состояние почвы, сократить время и снизить расходы в 2 раза на проведение технологических операций по почвообработке. Такие данные создадут основу для принятия эффективных управленческих решений в сельскохозяйственном производстве.
Выводы
Разработан алгоритм определения равномерности хода машины по ширине захвата. Алгоритм, позволяет оценивать ход выполнения технологической операции дистанционным путем. Алгоритм сформирован на основе данных наземных и дистанционных измерений, согласно полученным зависимостям, вариабельность составляет 12% у наземных измерений и 15% у воздушных, на основании чего можно сделать вывод, что воздушные измерения являются более высокоточными и ориентированы на сокращения временных затрат.
Полученная зависимость между результатами, создадут основу для принятия эффективных управленческих решений в сельскохозяйственном производстве. Дистанционный способ, является перспективным направлением в сторону цифровизации и отхода от наземных измерений с целью внедрения в технологию точного земледелия.
Список литературы Определение равномерности хода машины по ширине захвата наземным способом и с помощью БВС
- Detection and analysis of methane emissions from a landfill using unmanned aerial drone systems and semiconductor sensors Daugela I., Visockiene J.S., Kumpiene J. // Detritus. 2020 vol. 10. 127-138.
- Костомахин, М. Н, А. Н. Воронов, Р. К. Курбанов. Способ дистанционного мониторинга надежности сельскохозяйственной техники с использованием систем GPS/ГЛОНАСС. Инновации в сельском хозяйстве. 2018. № 3(28). - С. 353-357.
- Костомахин, М. Н., Р. К. Курбанов, Н. Г. Кынев. Точное земледелие расширяет свои границы. Сельскохозяйственная техника: обслуживание и ремонт.2018. № 3. - С. 7-9.
- Курбанов Р. К., Н. И. Захарова, О. М. Захарова, Д. М. Горшков Оценка перезимовки всходов селекционной озимой пшеницы с помощью БПЛА. Инновации в сельском хозяйстве.2019. № 3(32). - С. 133-139.
- Курбанов, Р. К, А. М. Фокин, М. А. Литвинов. Программное обеспечение для обработки мультиспектральных данных и оцифровки полей. Сельскохозяйственная техника: обслуживание и ремонт. 2021.№ 11. - С. 3-6.
- Курбанов, Р. К, Н. И. Захарова, О. М. Гайдук. Использование теплового канала (LWIR) для оценки состояния посевов и прогнозирования урожайности сельскохозяйственных культур. Электротехнологии и электрооборудование в АПК.2020. Т. 67. № 3(40). - С. 87-94.
- Лискин, И. В., Д. А. Миронов, Р. К. Курбанов. Обоснование параметров искусственной почвенной среды для лабораторного исследования изнашивания лезвия Сельскохозяйственные машины и технологии. 2017.№ 4. - С. 37-42.
- Личман Г. И., В. М. Коротченя, И. Г. Смирнов, Р. К. Курбанов, Концепция точного земледелия на основе понятий идеального поля и цифрового двойника. Электротехнологии и электрооборудование в АПК. 2020. Т. 67. № 3(40). - С. 81-86.
