Определение силовых параметров возмущенного движения почвообрабатывающих орудий в полевых условиях

Автор: Донцов И.Е., Лысыч М.Н.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки
Статья в выпуске: 4, 2017 года.
Бесплатный доступ
Определить в лаборатории силовые пара-метры почвообрабатывающих машин и орудий иногда затруднительно из-за больших разме-ров и масс последних. Определение же силовых параметров каждого рабочего органа может оказаться трудоемким и длительным процес-сом. Цель - определить силовые параметры возмущенного движения орудий в полевых условиях и проверить эффективность мето-да. За основу взята модель силового взаимо-действия почвообрабатывающих орудий с почвой, предложенная Л.В. Гячевым. Метод состоит в том, чтобы найти такие силовые параметры орудия, которые обеспечивают его заданную траекторию движения. Траек-торию движения почвообрабатывающего ору-дия получают экспериментально. Экспери-мент и обработку результатов можно суще-ственно упростить, если использовать ряд допущений. В уравнениях силовых параметров отбросим члены порядка выше первого. Выби-раем такую скорость движения, при которой закон возмущенного движения почвообраба-тывающего орудия относительно трактора описывается экспонентой. Эксперимент со-стоит из двух серий опытов: с параллельным расположением тяг навески; при одноточеч-ной схеме соединения орудия и трактора. Каждый опыт начинают с того, что задают начальное отклонение орудие. Затем начина-ют движение трактора и получают возму-щенную траекторию движения орудия. Движе- ние трактора осуществляют, по возможно-сти, равномерно и прямолинейно. В каждом опыте регистрируют положение орудия в начале и в конце движения, время и путь. За-тем по предложенным формулам вычисляют искомые силовые параметры орудия. Из ана-лиза погрешностей измерений и коэффициен-та вариации статистического ряда наблюде-ний вытекает, что предложенный метод определения силовых параметров орудий мо-жет быть использован на практике.
Трактор, орудие, меха-низм навески, поле, сила, траектория, колеба-ния, устойчивость движения
Короткий адрес: https://sciup.org/14084909
IDR: 14084909 | УДК: 631.3.072
Determining power parameters of the oscillating motion of tillers in the field
To determine in the laboratory the power pa-rameters of the tillage machines and implements sometimes difficult due to the large size and mass of the latter. Defining the power parameters of each tilling tool can be difficult and time consuming. The goal is to determine power parameters of the oscil-lating motion of tillage implements in field condi-tions and to test the effectiveness of the method. This method based on the model of force interac-tion of tillage implements with the soil, suggested by Professor L. V. Gyachev. The method is to find the power parameters of tillage implements, which provide a known trajectory of the tillage operation. The trajectory of tillage implements is the experi-mental curve. Experiment and results processing can be substantially simplified by using a number of assumptions. Equations in the power parameters, we discard the terms of the order above the first. Choose such speed of movement at which the law of perturbed motion tillage implements relative to the tractor described by the exponent. The experi-ment consists of two series of experiments: parallel arrangement of linkage; one-point arrangement of linkage. In every experience first reject tillers to the side. Then start the tractor and get the trajectory of the tillage operation. The movement of the tractor is carried out, if possible, uniformly and rectilinearly. Each experience registers the position of the tiller at the beginning and at the end of the movement, time and path. Power tillers parameters calculated by the proposed formulas. From the analysis of measurement errors and coefficient of variation statistics number of observations implies that the proposed method of determining the tiller power parameters can be used in practice.
Текст научной статьи Определение силовых параметров возмущенного движения почвообрабатывающих орудий в полевых условиях
Введение . Основными факторами, которые активно влияют на возмущенное движение почвообрабатывающих орудий, являются их силовые параметры. Это доказано многочисленными исследованиями устойчивости движения машин и орудий [1-6].
Для описания силового взаимодействия рабочего органа с почвой при неустановившемся движении орудия использована модель, предложенная Л.В. Гячевым [1]. Согласно гипотезе, реактивные силы приведены к динамическому винту (рис. 1). Модуль главного вектора ( R ), его направление (угол а ) и величина главного момента ( М ) зависят от направления (угол 5 ) вектора скорости ( V ) произвольно выбранной точки приведения сил (т. D). Указанные функции разложены в степенные ряды и аналитически выглядят следующим образом:
R = R + R5+..., а = а + а5+..., M = Mo + M15+.... (1)
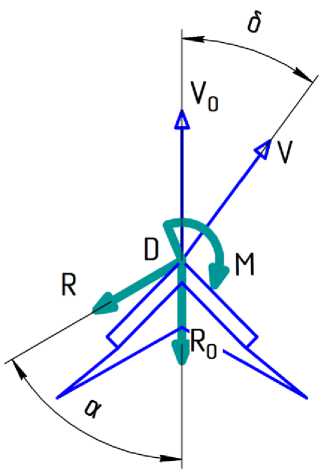
Рис. 1. Модель силового взаимодействия рабочего органа с почвой (по Гячеву Л.В.)
В работе [1] Л.В. Гячев также описал лабораторную установку для определения указанных силовых параметров отдельно взятого рабочего органа. Однако определить в лаборатории силовые параметры всей машины или орудия часто затруднительно из-за больших размеров и масс последних. Определение же силовых параметров каждого рабочего органа может оказаться трудоемким и длительным процессом.
Эксперимент и обработку результатов можно существенно упростить, если в уравнениях (1) отбросить члены порядка выше первого и представить модель силового взаимодействия орудия с почвой в виде равнодействующей сил сопротивления
R « const , а ® а 1 5 , L D ® const , (2)
где R – модуль равнодействующей сил сопротивления; а - угол между равнодействующей и продольной осью орудия; 3 - угол между вектором скорости точки приложения равнодействующей сил и продольной осью орудия; LD – расстояние от оси подвеса орудия до точки приложения равнодействующей сил сопротивления, которое названо приведенной длиной орудия . Если учесть, что модуль R можно вычислить по известному удельному тяговому сопротивлению орудия (формула Горячкина В.П.), то неизвестными остаются силовой параметр а 1 и расстояние L D . Отметим, что коэффициент а 1 безразмерен, так как угол а измеряется в радианах.
На основании описанной модели силового взаимодействия орудия с почвой в работе составлено дифференциальное уравнение колебаний навесного орудия [2, 3]. Представим его в каноническом виде
р + 2np + к2р = 0, (3)
где р - угол поворота навески относительно трактора (обобщенная координата); 2n и k 2 – соответственно диссипативный и квазиупругий коэффициенты дифференциального уравнения.
При n > k закон возмущенного движения орудия описывается экспонентой р=рое -n + 2 ", (4)
где р 0 - начальное возмущение; t - время движения, с.
Для одношарнирного варианта наладки навесной системы имеем aiR(L + Ld)2 k2 = ORL + LD) (5 2VJ ’ J’ для шарнирного параллелограмма – aR n = —1—, k =---,
2V mmL где m – масса орудия, кг; J – момент инерции орудия относительно точки, расположенной по середине оси подвеса орудия, кг·м2; L – расстояние от точек крепления тяг навески к трактору до оси подвеса орудия, м; V0 – скорость трактора, м/с.
Из формул (4)–(6) следует, что траектория движения орудия однозначно зависит от перечисленных выше параметров навески трактора и орудия. Значения m, J, L, R и V 0 могут быть получены путем несложных измерений или вычислений. Что же касается параметров а 1 и LD , то для их вычисления можно решить задачу, обратную той, когда по известным силовым параметрам орудия получают его траекторию (закон возмущенного движения). Здесь же следует сначала получить траекторию движения орудия, причем именно в полевых условиях, а затем вычислить силовые параметры а 1 и LD , которые и обеспечивают полученную траекторию. Поскольку неизвестными являются два параметра системы, то вычисления следует провести для двух различных траекторий движения орудия. Вычисления можно существенно упростить, если взять два частных случая расположения тяг навесной системы, например одношарнирный вариант, и с параллельным расположением тяг навески (см. (5) и (6)).
Цель исследований . Определить в первом приближении силовые параметры возмущенного движения почвообрабатывающего орудия в полевых условиях.
Задачи : разработать экспресс-метод приближенного определения силовых параметров возмущенного движения орудий в полевых условиях и проверить его эффективность на практике.
Методы и результаты исследований . Для решения поставленной задачи преобразуем сначала выражение (4) к виду
-
- n + П 2 = lnPL/ P l , (7)
где р 0 - начальное возмущение орудия, р к -возмущение в конце исследуемого отрезка траектории движения орудия.
Обозначим п = In фк/ р0) = In UKZ), с-1, (8) tt где K Z – кратность затухания возмущений на исследуемом отрезке траектории орудия.
Показатель п характеризует быстродействие системы и называется степенью устой- чивости. Кратность затухания KZ может быть
определена как отношение ординат x 0 , x K
шим полученное уравнение относительно
L + L D . Получим (м)
траектории движения орудия в начале и в конце исследуемого отрезка. Итак
— n + V n2 — k2 = ц . (9)
Значения коэффициентов n и k как функции от исследуемых параметров для различных схем наладки навески приведены в формулах (5) и (6). Подставим выражения (6) в формулу (9) и решим полученное уравнение относитель-
L + L d =
Vo- + Л+ J 2ц \ 4n a R
Отметим, что слагаемое J а} R
в среднем на
но a1. Имеем a =
— ( ц 2 + R/ mL Vom n R
Обратим внимание на то, что первое слагаемое в числителе формулы (10) в среднем на
два порядка меньше второго, поэтому им можно пренебречь. Получим
a i
V0 S
--- —--.
n L t n L
где S – абсцисса (длина) исследуемого отрезка траектории возмущенного движения орудия, м.
Как видим, параметр a 1 не зависит от силы сопротивления и точки приведения. Очевидно, что он в первую очередь зависит от формы рабочих органов.
Считая теперь параметр а 1 известным, подставим формулы (5) в выражение (9) и ре-
два порядка меньше, чем слагаемое , по-
4 ц 2
этому меньшим из них можно пренебречь. Имеем (м)
Ld —— V + 1 — L — — S/t + L — l . (13)
2 ц 2 ц
Таким образом, определение силовых параметров орудия в полевых условиях включает следующие мероприятия.
1. Эксперимент (рис. 2) состоит из двух серий опытов: а) с параллельным расположением тяг навески и б) при одношарнирной схеме соединения орудия и трактора. Каждый опыт начинают с того, что задают начальное возмущение, отклонив орудие в сторону. Затем начинают движение трактора и получают возмущенную траекторию движения орудия. Движение трактора осуществляют, по возможности, равномерно и прямолинейно. При этом, чем массивней трактор, тем меньшие возмущения от орудия он испытывает и тем точнее будут результаты эксперимента.
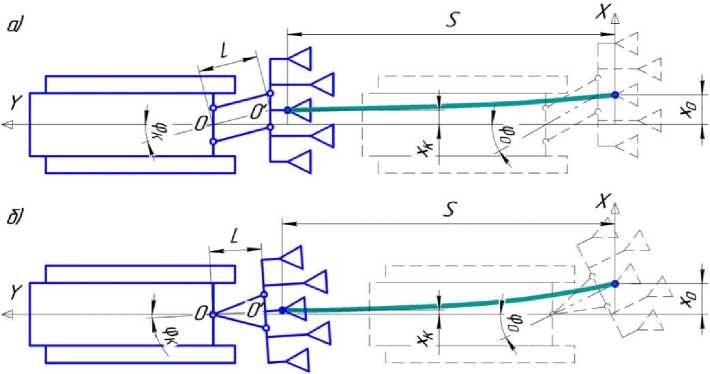
Рис. 2. Схемы движения агрегата: а – с параллельным расположением тяг навески; б – при одношарнирной схеме соединения орудия и трактора
-
2. В каждом опыте регистрируют возмущения
-
3. По данным опытов с параллельным расположением тяг навески, используя формулу (11), вычисляют значение параметра а 1 .
-
4. По данным опытов с одношарнирной схемой соединения орудия и трактора, считая а 1
-
5. На основании закона накопления средних погрешностей определяют погрешность измерений в каждой серии опытов. Ниже приводятся формулы для вычисления погрешностей косвенных измерений (вычислений) силовых параметров исходя из заданных погрешностей измерительных средств и приборов, используемых для прямых измерений параметров.
известным, по формуле (13) вычисляют приве- орудия в начале ( x0 ) и в конце ( xK ) выбранного отрезка траектории орудия (м); время t (с) и путь S (м), пройденный трактором; расстояние L от точек крепления тяг навески к трактору до оси подвеса орудия (м), после чего вычисляют степень устойчивости ц (с-1) по формуле (8).
денную длину орудия LD (м).
Погрешности вычислений определяют по формулам:
-
- степень устойчивости ц
Лц
Г A x 12
+ Л
+
ln( x / x )
< x K t )
V x o t )
t2
Л )
;
- силовой параметр а 1
Ла
Г л 12
Г SAt 12
V V tLn )
+ --
V tLn )
+
Г SAL \ 2
VtL ц )
+
Л
Vt^ )
- приведенная длина орудия LD
A L d
Г AS 1
V 2tЦ )
+
т
2п
V 2t ц )
+
ГS/т+1
V 2ц2
Лц + AL, )
где A x, A S, A t, A L - погрешности прямых измерений.
Как видно из формулы (14), погрешность Лц вычисления степени устойчивости, от которой, в свою очередь, зависят погрешности вычислений исследуемых силовых параметров, будет тем меньше, чем больше будут знаменатели в каждом из слагаемых формулы (14). С этой целью необходимо увеличивать масштаб траектории орудия (х0 ^ max,xK ^ max,t ^ max). Откуда следу- ет, что для повышения точности измерений следует увеличивать длину тяг навески (L ^ max).
Необходимый отрезок исследуемой траектории движения орудия, который можно охарактеризовать кратностью возмущений в начале и в конце траектории, определяют из условия минимума погрешности Лц .
Для этого преобразуем выражение (14) в выражение
Лц =
Г р
V PlKz
ц
)
+
Г ЛР
V PolnKZ
12 ц
)
Г At+
----ц
I lnK7 '
Z
.
Необходимым условием экстремума (минимума) функции (15) является равенство нулю ее частной производной
д ( Лц ) дKz
После преобразований получим, что требуемая кратность затухания возмущений на исследуемом отрезке траектории вычисляется по формуле
Kz = 2 + 5 +
At Фо n . (19)
V Аф 7
Из анализа зависимости (19), в частности, вытекает, что kz > 4,23 .
Из условия (19) определяют необходимую продолжительность опыта (время движения трактора, с)
_ In ( 1/K z ) t N ,
n
или, используя формулу (20), необходимую длину исследуемого отрезка траектории (м)
S = Vo tN •
По предложенной методике на учебном полигоне был поставлен эксперимент по определению силовых параметров орудий. Исследовались два типа орудий: плуг ПКЛ-70 и культиватор КЛБ-1,7. Причем плуг исследовали в 4 модификациях: 1) без дисковых ножей; 2) с перед- ним дисковым ножом; 3) с задним дисковым ножом и 4) с двумя (передним и задним) дисковыми ножами. Глубина хода плуга – 12 см. Угол атаки дисковых батарей культиватора КЛБ-1,7 – 30º, ширина защитной зоны – 25 см, глубина обработки – 8 см. Повторность опытов в каждой серии рассчитана на основании разведывательных опытов. Окончательно было принято: для схемы с параллельным расположением тяг повторность опытов равна 10, для одношарнирной схемы – 12. В качестве тягового средства использовали гусеничный трактор ДТ-75К. Начальное отклонение предварительно заглубленного орудия задавали поворотом трактора на месте.
В таблице представлены результаты вычислений, погрешности измерений Aa 1 , A L D и коэффициенты вариации статистического ряда u % .
Силовые параметры орудий
|
Орудие |
Сила R , кН |
Коэффициент а 1 |
Приведенная длина LD , м |
||||
|
а |
Л а |
и,% |
LD |
A L d |
и,% |
||
|
ПКЛ-70 без дисковых ножей |
5,2 |
2,01 |
0,020 |
13,8 |
1,05 |
0,03 |
16,5 |
|
ПКЛ-70 с передним дисковым ножом |
5,4 |
2,53 |
0,020 |
14,0 |
0,73 |
0,03 |
17,6 |
|
ПКЛ-70 с задним дисковым ножом |
5,3 |
2,24 |
0,015 |
12,7 |
1,13 |
0,04 |
17,0 |
|
ПКЛ-70 с двумя (передним и задним) дисковыми ножами |
5,5 |
2,67 |
0,025 |
13,9 |
0,89 |
0,03 |
18,4 |
|
КЛБ-1,7 |
3,2 |
3,17 |
0,030 |
10,6 |
0,73 |
0,03 |
12,2 |
Выводы . Дисковые ножи, установленные на плуг ПКЛ-70, несмотря на незначительное увеличение тягового сопротивления, вместе с тем значительно повышают коэффициент а : с 2,01 до 2,67. При этом наибольшее влияние оказывает дисковый нож, установленный спереди. Для культиватора КЛБ-1,7 со сферическими дисковыми рабочими органами коэффициент а 1 заметно больше. Он равен а 1 = 3,2 . Очевидно, что решающим фактором здесь является форма рабочих органов, во многом похожая на плоские дисковые ножи. Из анализа погрешностей измерений и коэффициента вариации статистического ряда наблюдений (см.
табл.) вытекает, что предложенный метод определения силовых параметров орудий может быть использован на практике.
Список литературы Определение силовых параметров возмущенного движения почвообрабатывающих орудий в полевых условиях
- Гячев Л.В. Устойчивость движения сель-скохозяйственных машин и агрегатов. -М.: Машиностроение, 1981. -206 с.
- Донцов И.Е. Повышение курсовой устойчи-вости машинно-тракторного агрегата с фронтальным орудием (ФМТА)//Вестник КрасГАУ. -2008. -№ 2. -С. 209-215.
- Донцов И.Е. Проектирование новых комби-нированных МТА (КМТА) с фронтальными и задними навесными орудиями//Вестник КрасГАУ. -2009. -№ 5. -С. 152-156.
- Перспективная конструкция многофункцио-нального культиватора для склонов с авто-матической биометрически корректируемой системой контроля поперечной устойчиво-сти/И.М. Бартенев, С.Д. Кургалин, Я.А. Туровский //Лесотехнический жур-нал. -2015. -Т. 5, № 2 (18). -С. 158-165.
- Тухтакузиев А., Мансуров М.Т. Исследова-ние устойчивости трактора с орудиями пе-редней и задней навески против бокового заноса//Тракторы и сельхозмашины. -2015. -№ 9. -С. 34-35.
- Jönsson H., Bengtsson R. Return from a Lat-eral Displacement by Front-Mounted Three-Point Hitched Implements//Journal of Agricul-tural Engineering Research. -1998. -№ 3, Vol. 69. -P. 199-208.
