Определение уникальности походки человека с использованием инерциальных датчиков портативного устройства

Автор: Столяров Александр Юрьевич
Журнал: Математическая физика и компьютерное моделирование @mpcm-jvolsu
Рубрика: Компьютерное моделирование
Статья в выпуске: 1 (26), 2015 года.
Бесплатный доступ
В статье демонстрируется уникальность походки человека на основании данных, получаемых с сенсоров портативного устройства путем экспериментального исследования. Раскрываются принципы дальнейшей автоматизации процесса и варианты применения полученных данных.
Походка человека, акселерометр, гироскоп, скорость вращения, кажущееся ускорение, фильтр нижних частот, идентификация по походке
Короткий адрес: https://sciup.org/14968977
IDR: 14968977 | УДК: 004.67:621.398 | DOI: 10.15688/jvolsu1.2015.1.6
Determination of the uniqueness of human gait using inertial sensors of portable device
The article demonstrates the uniqueness of human gait based on data from inertial sensors of portable device. The assumption of the possibility of developing a gait model for every human, which consists of a series of patterns of different states of human movement: walking, running, climbing stairs, was made. Then a number of software was developed. The first program receives measurements from inertial sensors on mobile devices with the Android operating system, processes the data using a low-pass filter and stores them in the device file system. The second program processes the data from the stored files, produces their segmentation and visualizes in graphs. To confirm our assumption, an experiment was conducted using the developed programs. 10 people participated in the experiment. The obtained experimental data are periodical and different for every human. During data analysis, it was also observed that the rotation rate around the axis of the device (gyroscope data) demonstrates the difference between human gaits better than the proper acceleration (accelerometer data). The results of the experiment prove the possibility of creating a template of human walking and allow us to continue research in this direction.
Текст научной статьи Определение уникальности походки человека с использованием инерциальных датчиков портативного устройства
DOI:
В настоящее время портативные устройства (мобильные телефоны, смартфоны, планшетные компьютеры и т. д.) получили широкое распространение. Большинство из них оснащено акселерометрами и гироскопами, которые и позволяют замерять все необходимые данные для построения модели походки человека. Данная модель смогла бы помочь в оптимизации алгоритмов инерциальной навигации и задачах идентификации человека.
Целью данного исследования является разработка комплекса программного обеспечения для сбора с инерциальных датчиков портативного устройства данных и их обработки для подтверждения уникальности походки человека. Обзор исследований по данной теме был произведен в работе [1].
1. Построение гипотезы
Исследование проводится в рамках предположения, что для каждого человека существует ряд шаблонов его походки. Ряд будет состоять из нескольких шаблонов, опи- сывающих разные состояния движения человека: ходьба, бег, поднятие по лестнице. Данная работа показывает, что выдвинутая гипотеза применима для ходьбы человека и из полученных данных возможно построение уникального шаблона для каждого владельца портативного устройства. Стоит заметить, что шаблонизирование определенных жестов (рисование круга, квадрата, треугольника, личной подписи) уже было проделано в работе [3] и успешно используется на практике.
2. Разработка программного обеспечения
Сбор данных. Первый этап исследования заключался в получении данных с сенсоров устройства. Для этого была создана программа на языке Java в среде разработки Android Studio для устройств с операционной системой Android. Так как мобильные устройства построены с использованием бесплатформенных инерциальных систем, то данные поступают с трех одноосевых акселерометров и трех одноосевых гироскопов. В этом случае мы получаем угловую скорость ш и кажущееся ускорение п (разность между истинным ускорением объекта и гравитационным ускорением) по трем осям X , У , Z .
Предобработка. Так как данные с акселерометра и гироскопа обычно довольно сильно зашумлены, для их предобработки часто применяют различные фильтры. В разработке был применен фильтр нижних частот, который способен фильтровать сигналы выше указанной частоты, то есть пропускать сигналы низкой частоты, что позволяет избавиться от шумовых помех сигнала. Использование данного фильтра обусловлено простотой реализации и скоростью работы. Этот и другие фильтры подробно описаны в статье [2].
Фильтр нижних частот описывается следующей формулой: О п = О п-1 + а(1 п — — О п -1 ) , где О п — выходное значение сигнала (отфильтрованное); 1 п — входное значение (неотфильтрованное); а — коэффициент фильтрации. Эксперименты проводились с коэффициентом а = 0 , 3 .
В эксперименте фильтр применялся в режиме реального времени (сигнал фильтровался сразу при поступлении), а выходные данные записывались в файл, и в дальнейшем подвергались обработке. Стоит также заметить, что данные с начала и конца каждого эксперимента удалялись из конечного файла, так как не относились непосредственно к данным ходьбы человека.
Сегментация сигнала. Для обработки файлов с полученными измерениями была создана программа на языке C# в среде разработки Visual Studio. Сегментация данных производилась по алгоритму интервалов фиксированной длины. Вычисление фиксированной длины производилось следующим образом:
1) Вычисление максимального значения по одной из осей.
2) Определение локальных максимумов на всем интервале, наиболее близких к найденному значению.
3) Вычисление среднего значения временного интервала между локальными макси-
- мумами. 3. Проведение эксперимента
Далее производилась сегментация от начального локального максимума с временным интервалом, равным фиксированной длине, чтобы выделить периоды, за которые человек делал один шаг.
В эксперименте участвовало 10 человек. Перед каждым участником стояла задача пройти по дугообразной линии протяженностью 40 метров привычной для них походкой. Для чистоты эксперимента использовалось одно мобильное устройство с предустановленным, разработанным ранее, программным обеспечением, так как характеристики инерциальных сенсоров на разных мобильных устройствах могут сильно отличаться. В ходе эксперимента были получены и обработаны данные с акселерометра (см. рис. 1) и гироскопа (см. рис. 2).
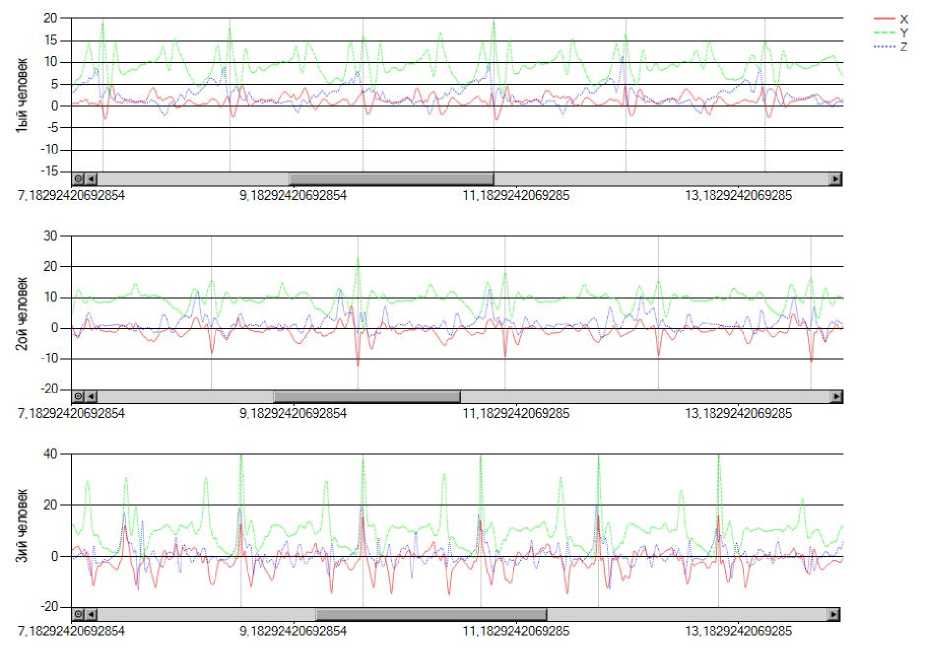
Рис. 1. Кажущиеся ускорения портативного устройства, возникающие во время ходьбы. Данные трех участников эксперимента
На представленных графиках видно, что данные, полученные для каждого человека, сильно различаются. Первым существенным отличием являются данные гироскопа о скорости вращения по осям X и Z , так как наблюдается четкое выделение шаблона походки человека по этим осям. Однако выделить шаблон по угловой скорости вокруг оси У сложнее, так как в ходе эксперимента у всех участников стояла задача пройти именно по дугообразной линии, что поспособствовало дополнительным вращениям по оси У (все участники предпочли положить смартфон в карман своих брюк торцом вниз — это привело к ортогональному расположению оси У к поверхности Земли).
Еще одним немаловажным отличием являются периоды шага. У первого и третьего человека этот период меньше, чем у второго — это говорит нам о том, что второй прошел дистанцию немного быстрее.
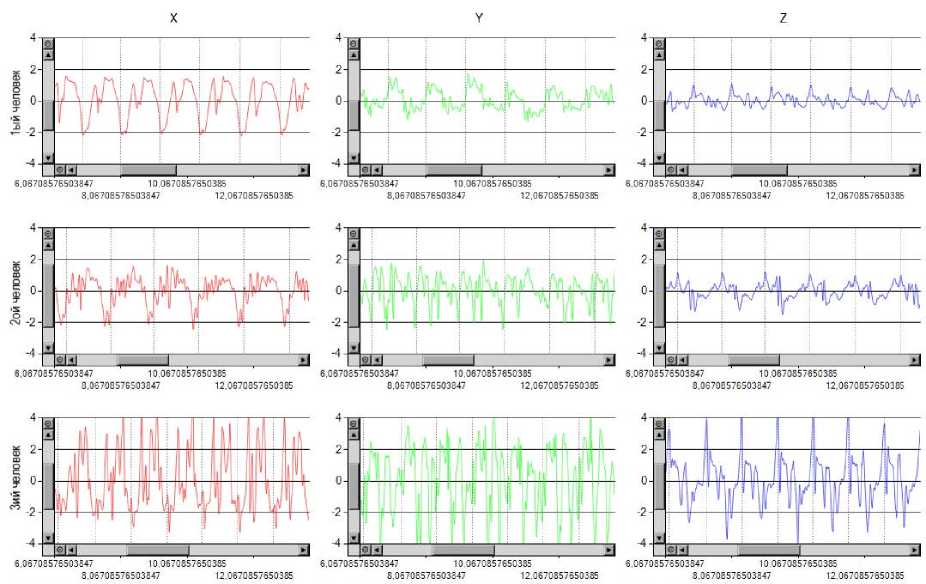
Рис. 2. Скорости вращения портативного устройства вокруг своих осей, возникающие во время ходьбы. Данные трех участников эксперимента
На графиках данных акселерометра также можно проследить периодизацию, однако эти данные подвергнуты чуть большим шумам, чем у гироскопа, что затруднит идентификацию владельца и составление шаблона.
Заключение
Результаты проведенных экспериментов подтверждают выдвинутую ранее гипотезу, что позволяет нам продолжить исследования в данном направлении.
Следующим шагом планируется автоматизировать выделение шаблона и научиться распознавать движение человека по уже имеющимся шаблонам. Учитывая непостоянство движения и погрешности устройств, систему автоматизации нужно будет построить с возможностью самообучения. Кроме этого, шаблонам будет присвоен ряд других параметров в зависимости от решаемой задачи. Так, для задач инерциальной навигации ими выступят скорость и длина пройденного пути.
Список литературы Определение уникальности походки человека с использованием инерциальных датчиков портативного устройства
- Казанцева, А.Г. Идентификация человека по походке с использованием носимых сенсоров. Обзор исследований/А.Г. Казанцева//Изв. ОмГУ им. Ф.М. Достоевского, Математические структуры и моделирование. -2013. -№ 2 (28). -C. 103-111.
- Пестов, Е.А. Распознавание движения мобильного устройства/Е.А. Пестов//International Journal of Open Information Technologies. -2013. -Т. 1, № 3. -C. 5-10.
- Jiayang, L. User evaluation of lightweight user authentication with a single tri-axis accelerometer/L. Jiayang, Z. Lin, W. Jehan, V. Venu//MobileHCI'09 Proceedings of the 11th International Conference on Human-Computer Interaction with Mobile Devices and Services. -New York: ACM, 2009. -P. 15:1-15:10.
