Определение затрат мощности при повороте гусеничных тракторов ОАО «ОТЗ»

Автор: Скобцов И.Г., Питухин А.В., Куликов М.И.
Журнал: Resources and Technology @rt-petrsu
Статья в выпуске: 5, 2005 года.
Бесплатный доступ
Рассматривается методический подход к определению затрат мощности при повороте серийного (механическая трансмиссия) и перспективного (гидрообъемная трансмиссия) трелевочных тракторов, изготовленных на Онежском тракторном заводе.
Трелевочный трактор, механическая трансмиссия, гидрообъемная трансмиссия, режим поворота
Короткий адрес: https://sciup.org/147112111
IDR: 147112111
Текст научной статьи Определение затрат мощности при повороте гусеничных тракторов ОАО «ОТЗ»
В условиях Северо-Западного федерального региона всесезонная заготовка древесины сопряжена со значительными трудностями, поскольку большую часть лесопокрытой площади занимают почвы с низкой несущей способностью (III и IV категорий), пять-шесть месяцев в году территория Европейского Севера покрыта снежным покровом и круглогодичное использование лесозаготовительной техники на этих территориях затруднено по условию проходимости. Этим объясняется преобладающее использование гусеничной техники на лесозаготовках. Как показывают исследования маневренности гусеничных трелевочных тракторов в производственных условиях, самым нагруженным и энергоемким режимом движения является поворот [1, 2, 3]. Материал, изложенный ниже, представляет собой результат исследований, проведенных на кафедре ТМиР ПетрГУ.
В настоящее время одним из путей решения проблемы повышения экономичности лесозаготовительной техники является внедрение новых высокоэффективных трансмиссий. Комплекс НИОКР, который проводился ГСКБ ОТЗ в сотрудничестве с ЛТА, ОКБ «Гидромаш» и рядом других организаций начиная с 1987 года, дал в целом положительные результаты испытаний опыт- ных образцов машин с гидрообъемной трансмиссией и поставил ряд задач, одной из которых являлось исследование совокупности процессов и явлений, связанных с режимом поворота трактора с гидрообъемной трансмиссией, выполненной по бортовой схеме.
В этой связи исследование кинематики, динамики и затрат мощности при повороте гусеничной лесозаготовительной машины, оборудованной механизмом поворота, в качестве которого выступает гидрообъемная трансмиссия, выполненная по бортовой схеме, является весьма актуальной задачей.
ПОСТРОЕНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
Кинематика. Выражения, описывающие закон изменения линейных скоростей на забегающем и отстающем бортах в зависимости от конструктивных параметров трактора и параметров гидропередачи, имеют вид:
02 = у^ !'зв ' ' ПонП», ' 0 " ^2) i
О1 = у^ гзв ■ 2, ■ ПонПо.м " (1 ± ^),
где iMex - передаточное число механической части трансмиссии; юЙ0 - частота вращения коленчатого вала ДВС; qo„, q„, - объемные КПД гидроагрегатов; X - параметр регулирования гидронасоса, X = qJ qmM ( q, - текущий, qmax - максимальный объем рабочей камеры гидронасоса); г1в - радиус ведущей звездочки; 5- буксование.
Таким образом, при кинематическом регулировании линейные скорости определяются параметрами регулирования, объемными КПД гидроагрегатов и свойствами грунта.
Далее определялись продольные и поперечные перемещения опорных ветвей гусениц (рис.1). Элементарные продольные перемещения забегающей гусеницы dS^p^x1) = S^dx . (3)
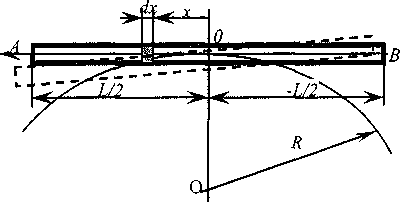
Рис. 1. Схема определения продольных и поперечных перемещений опорной ветви гусеницы
Суммарные продольные перемещения элемента забегающей гусеницы определим с помощью интегрирования выражения:
S2р(х)= ^32dx = 32x + C.
С учетом начальных условий S2p = 0 при х = — , откуда С = -32 — , получим закон изменения продольных перемещений элемента гусеницы относительно почвы за счет ее деформации в продольном направлении:
82р^ = 82х-82 — = 82

Элементарное поперечное перемещение элементов забегающей гусеницы dS2spp

xdx
Здесь R - радиус поворота; В - колея трактора.
С учетом начальных условий S2s = 0,х = 0 суммарное поперечное перемещение задней ветви забегающей гусеницы относительно поверхности грунта
Динамика. При повороте гусеничной трелевочной машины в ходе перемещения пакета деревьев (хлыстов) происходит перераспределение нагрузок между гусеницами за счет изменения направления действия крюковой силы от части пакета, волочащейся по грунту (появление поперечной составляющей крюковой силы). Опорные реакции z-й гусеницы:
Zi - 2ПрМ1 ( 1) '82поп,(5)
реакция при прямолинейном движении:
ZnpiLM = ~(GT + 51 + Ркр sin/?),(6)
величина перераспределения:
3Znml = PKD cos/?sin у-Р,—(7)
ИЛИ
Z1 = l(Gr + а + Ркр sin/?) + Ркр ^-cos/? sin у - Pj ^ ;
Z2 = ^GT + QX + Р smPVp^•^-cos/?siny + /)A Z DD
Здесь GT - вес трактора; Qy - вес части пакета, размещенной на тракторе; Ркр - крюковая нагрузка; Pj - сила инерции; /? - угол между линией действия крюковой силы и поверхностью движения; у - угол между продольной осью машины и пакетом деревьев; hKp - вертикальная координата приложения крюковой силы; hc - вертикальная координата центра масс.
Момент сопротивления повороту Мс определялся как сумма трех составляющих:
-
1) момент сопротивления при скольжении опорной поверхности гусеницы по грунту Мт ;
-
2) момент сопротивления при деформации грунта кромками гусениц М„г;
-
3) момент сопротивления от перемещения вала грунта Мсл1:
Мр — Мр а* М„г + Мсд,. (8)
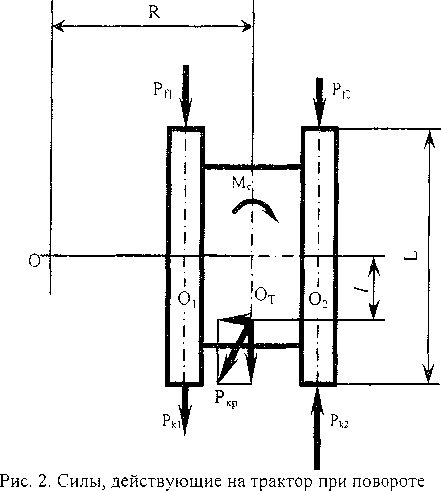
Необходимые касательные силы тяги определятся из уравнений моментов внешних сил относительно полюсов вращения О| и О2 (рис. 2)
рпв ~ РкР й^Р^у ■ -| - Pf2B -Мс-
~Мс - Ркр1 cos /? sin у = 0 ; (9)
- Рк\В * Ркр cos рeasy-^ + PJXB-Мс -
-Ркр1 cos Р sin / = 0 , (10)
где Pk2,Рк; - силы тяги; Ру2,Ру\ - силы сопротивления поступательному движению.
Мощность, необходимая для поворота, расходуется на преодоление внешних и внутренних сопротивлений:
NHO6 =N0 + NT ,
(Н)
где Ng - мощность, расходуемая на преодоление внешних сопротивлений; Ny - тормозная мощность (мощность, затрачиваемая на трение в буксующем фрикционном элементе).
При полном выключении одной из муфт поворота, применяемых на серийных трелевочных тракторах ОАО «ОТЗ», потерь на трение во фрикционном элементе не будет (режим поворота с расчетным радиусом), и затраты мощности можно представить в виде:
Nm)B =NO ■
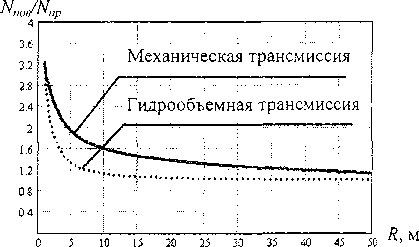
Рис. 4. Сравнительные графики затрат мощности при повороте тракторов с механической и гидрообъемной трансмиссией, построенные на основании теоретических расчетов
Это выражение будет справедливо для описания затрат мощности при повороте гусеничной машины с бесступенчатым механизмом поворота (механизмом поворота, обеспечивающим любой радиус поворота как расчетный радиус).
Мощность внешних сопротивлений представим в зависимости от мощности, потребной для прямолинейного движения машины до входа в поворот
N0
= Nnp
Р + Чгр Р-Нк
ИЛИ
N q _ Р + Чгр N„p Р + Чк
где q?p - основной параметр поворота, ргр =
Мс .
Р™ ■ В
p = R!B - относительный радиус поворота; РКП -
геометрическая сумма касательных сил тяги отстающей и забегающей гусениц; qk - основной параметр механизма поворота, qk = 0.5 для механизмов поворота второго типа (бортовые фрикционы, одноступенчатые планетарные механизмы поворота); qk >0.5 для механизмов поворота третьего типа.
Графики зависимости мощности внешних сопротивлений Nq = /(7?) и мощности, необходимой для поворота Мпов = /(7?) от радиуса для различных типов механизмов поворота, представлены на рисунках 3, 4.
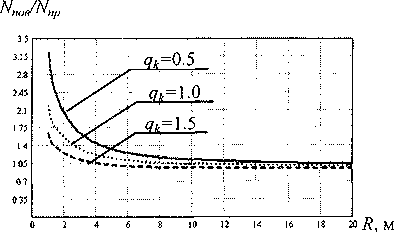
Рис. 3. Графики зависимости мощности внешних сопротивлений от радиуса поворота
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
Методика предусматривала проведение испытаний гусеничной лесозаготовительной машины в летних и зимних условиях (с грузом и на холостом ходу), и ставила целью исследование кинематики, динамики и энергозатрат при повороте в диапазоне от Rce„6 до Я„„„.
Объектом исследования являлся опытный образец гусеничного трелевочного трактора на базе ТБ-1М-15, оборудованный гидрообъемной трансмиссией, выполненной по бортовой схеме. Трактор был оснащен электроизмерительной аппаратурой, позволяющей измерять и регистрировать с помощью контроллера на базе микропроцессора Motorola MC68HC908AZ60A следующие показатели: частоту вращения коленчатого вала двигателя, частоту вращения валов гидромоторов, крутящие моменты на валах гидромоторов, давления в напорных магистралях, расход топлива за время опыта, время опыта.
Аппаратура. Частоты вращения вала двигателя и валов гидромоторов измерялись с помощью тахогенераторов; крутящие моменты на валах гидромоторов - с помощью фольговых тензорезисторов, наклеивающихся на валы; давление в гидросистеме - с помощью тензометрических датчиков давления ТДД, установленных в клапанных коробках гидромоторов. Установка датчиков-преобразователей, их тарировка и подготовка электроизмерительной аппаратуры к работе обеспечивали высокую точность измерения физических величин. Более подробное изложение методики, объекта и аппаратуры экспериментальных исследований приводится в работе [4].
ОБРАБОТКА ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ И ПРОВЕРКА АДЕКВАТНОСТИ РАЗРАБОТАННОЙ МОДЕЛИ
Разработанная аппаратура позволяла снимать информацию с семи датчиков (один раз за 17 мс снимается информация с 7 датчиков), оцифровывать и в 16-ричном виде записывать ее во FLASH память контроллера, а также передавать полученную информацию в персональный компьютер. Ниже приведем пример кода полученных экспериментальных данных:
S12380000000600D0600000000860D06000000 S12380200600O00000860DO600OO0O00800D00 51238O400O810D06000000017F0D0600000O01 51238060000003007A1D066A001B0078220664 5123808078230600007С017423060000950171 512380A0F3E0017123066900EB0272240700F3 S12380C0230700AF3A027923060000F5027723 S12380E0F8027A230700F4D60277240600F1A3 51238100070000F40271230600F2AB02792303 512381200278240600F2E5027623070000F502
Полученные данные каждого из записанных параметров за цикл установившегося поворота в каждой серии опытов после перехода к десятеричной системе исчисления переводились, согласно результатам тарировок, в физические величины в программной среде Excel. Для удобства дальнейшей обработки и сравнения полученных экспериментальных данных с теоретическими значения частот вращения и моментов на валах гидромоторов были переведены соответственно в скорости иь и? и силы тяги Ркь Рк2 отстающей и забегающей гусениц. Далее вычислялись оценки математических ожиданий и исправленные оценки дисперсий каждого из параметров, проверялась однородность ряда дисперсий опытов по G-критерию Кочрена, определялись регрессионные зависимости, строились оценки корреляционных функций и спектральных плотностей случайных процессов.
Сравнительные данные теоретических и экспериментальных значений сил тяги при повороте, а также расхождения между ними для опытного образца трелевочного трактора с гидрообъемной трансмиссией (летняя серия опытов) представлены в таблице 1.
Таблица 1
Теоретические и экспериментальные значения сил тяги
ВЫВОДЫ
-
1. Разработанная математическая модель движения гусеничного трелевочного трактора, описывающая кинематику и динамику установившегося поворота, позволяет определять затраты мощности при повороте машин с различными типами трансмиссий (механизмов поворота).
-
2. Адекватность предложенной модели подтверждается данными экспериментальных исследований, проведенных на серийном гусеничном тракторе, оснащенном механической трансмиссией, и перспективном гусеничном тракторе, оснащенном гидрообъемной трансмиссией, выполненной по бортовой схеме. Адекватность проверялась с использованием F-критерия. Разница между данными расчета и эксперимента не превышает 10 %.
-
3. Результаты моделирования и экспериментальных исследований показывают, что затраты мощности при повороте гусеничного трелевочного трактора возрастают с уменьшением радиуса поворота, причем мощность, необходимая для поворота трактора с гидрообъемной трансмиссией, на 15...20 % ниже мощности, необходимой для поворота трактора с механической трансмиссией (при малых радиусах).
-
4. Разработанный для проведения экспериментальных исследований микроконтроллер с необходимыми согласующими усилителями может применяться для снятия динамических характеристик не только опытного образца трелевочного трактора, но и других тракторов и лесозаготовительных машин отечественных и зарубежных производителей. Устройства на данном микропроцессоре Motorola MC68HC908AZ60A могут применяться не только для измерений, но и для наблюдений (контроля), и, что более важно, для управления движением объектов (через исполнительные устройства) в режиме реального времени.
Список литературы Определение затрат мощности при повороте гусеничных тракторов ОАО «ОТЗ»
- Зайчик М. И. Характеристика поворотливости гусеничных лесосечных машин и баланс мощности/М. И. Зайчик//Труды МЛТИ, 1970. Вып.25.
- Куликов М. И. Исследование поворота гусеничных трелевочных тракторов. Дис. … канд. техн. наук/М. И. Куликов. М.,1971.
- Махов Г. А. Исследование поворота машин на трелевке леса. Автореф. дис. … канд. техн. наук/Г. А. Махов. М.,1969.
- Скобцов И. Г. Экспериментальные исследования поворотливости гусеничных тракторов ОАО «ОТЗ»/И. Г. Скобцов//Труды лесоинженерного факультета ПетрГУ. Вып.4. Петрозаводск: Изд-во ПетрГУ, 2003. С. 119-121.
