Оптимальная нелинейная фильтрация оценок информационного воздействия в стохастической модели информационного противоборства

Автор: Иван Сергеевич Полянский, Кирилл Олегович Логинов
Журнал: Информатика и автоматизация (Труды СПИИРАН) @ia-spcras
Рубрика: Информационная безопасность
Статья в выпуске: Том 22 № 4, 2023 года.
Бесплатный доступ
В статье разработано вычислительно эффективное алгоритмическое решение задачи оптимальной нелинейной фильтрации оценок информационного воздействия в обобщенной стохастической модели информационного противоборства. Сформированное решение применимо при наличии разнородных правил измерения параметров модели информационного противоборства, на основании которых формируется пара систем стохастических дифференциальных уравнений. Оценка информационного воздействия в модели оптимальной нелинейной фильтрации выполняется по критерию максимального правдоподобия по определяемой эволюции апостериорной условной функции плотности вероятности на заданном интервале наблюдения. Нахождение апостериорной условной функции плотности вероятности в заданный момент времени осуществляется с учетом теоремы сложения вероятностей, как вероятность суммы двух совместных событий, функции плотности которых устанавливаются из численного решения соответствующих робастных уравнений Дункана-Мортенсена-Закаи. Для первого события полагается, что первая система стохастических дифференциальных уравнений является уравнением состояния, а вторая - уравнением наблюдения. Для второго события устанавливается их определение в обратном порядке. Решение робастного уравнения Дункана-Мортенсена-Закаи выполнено в постановке спектрального метода Галёркина при дискретизации интервала наблюдения на подынтервалы и сведении исходного решения к численному рекуррентному исследованию последовательности подзадач по так называемому Yau-Yau’s алгоритму, предполагающему оценку вероятностной меры из решения прямого уравнения Колмогорова при ее последующей коррекции по наблюдению. Для выделения особенностей алгоритмической реализации составленного решения сформирован алгоритм оптимальной нелинейной фильтрации оценок информационного воздействия в обобщенной стохастической модели информационного противоборства при уточнении листинга исполняющей его функции, который представлен псевдокодом. Для выявления предпочтительности составленного алгоритмического решения по оптимальной нелинейной фильтрации оценок информационного воздействия проведена серия вычислительных экспериментов на тестовых выборках большого объема. Результат оценки информационного воздействия, получаемый по предложенному алгоритму, сравнен с определяемым решением: 1) по средневыборочным значением из моделей наблюдения; 2) ансамблевым расширенным фильтром Калмана; 3) алгоритмом фильтрации, предполагающим численное исследование уравнения Дункана-Мортенсена-Закаи. По проведенному апостериорному исследованию выделены количественные показатели, устанавливающие выигрыш составленного алгоритма и границы его применимости.
Нелинейная фильтрация, оценка информационного воздействия, стохастическая модель информационного противоборства, робастное уравнение Дункана-Мортенсена-Закаи, гауссовы базисные функции, спектральный метод Галёркина
Короткий адрес: https://sciup.org/14127447
IDR: 14127447 | УДК: 57-77 | DOI: 10.15622/ia.22.4.2
Текст статьи Оптимальная нелинейная фильтрация оценок информационного воздействия в стохастической модели информационного противоборства
1. Введение. Постоянное расширение аудитории социальных сетей и мессенджеров обуславливает значительный рост их влияния на жизнь человека в обществе. Это стимулирует интерес ученых к исследованию процессов информационного воздействия социальных медиа на формирование общественного мнения [1–6]. Наличие у платформ социальных медиа открытого описания способов программного взаимодействия (API – application programming interface) при одновременном развитии сторонних библиотек и расширений (numpy, requests, pandas, seaborn, networkx и пр.) высокоуровневых языков (python), автоматизирующих рутинные функции обработки, визуализации и анализа данных [7], увеличивает мотивацию подобных исследований с позиции формализации представлений при применении, совершенствовании и разработке методов математического моделирования информационного противоборства и управления в структурированном социуме.
Методологическую основу формализованного исследования социальных медиа при построении математических моделей информационного противоборства и управления составляют теории вероятностей [5, 6, 8], игр [2], графов [2, 9] и дифференциальных уравнений [3, 4, 10]. Основные подходы математических представлений по получению оценок информационного воздействия базируются на анализе активных сетевых структур [3] и дифференциальных уравнений [2]. С позиции относительной простоты и точности модели анализа реальной социальной сети в условиях неоднозначности и неполноты информации атрибутивного пространства взаимодействующих пользователей первичной предпочтительностью обладает математическая формализация, основанная на представлениях систем дифференциальных уравнений – модели информационного противоборства в структурированном социуме [2, 4, 10]. Их математическую запись, обобщенно учитывающую выделенные в [2, 4, 10] факторы распространения информации в социуме, можно определить в следующем виде [11]:
k ' = У тк (t)
M amk(t) + ^^ вm′ m (t)xm′k (t) m‘ = 1
Y mk (t^x mk (t);
dy mk (t) dt
dx mk (t)
dt
M
Y mk (t^y mk (t) +
+ a mk (t) + ^^ в m ′ m (t) x m ′ k (t)
L m ‘ = 1
N m X X (x mk ‘ (t) + y mk ’ (t))^ ,
где m' ,m e {1, M}; k = 1, K; K - число субъектов, в отношении которых в социуме формируются предпочтения у индивидов; M – число подгрупп, выделяемых в социуме; Nm – число индивидов в m-й подгруппе M при обозначении N0 = ^2 Nm общей численности социума; xmk и ymk – число адептов и пmре=д1адептов соответственно k-го субъекта из m-й подгруппы социума; αmk и γmk – интенсивности положительной и отрицательной информации, распространяемой внешними источниками в отношении k-го субъекта при учете особенности их восприятия индивидами m-й подгруппы; βm′m – интенсивность межличностной коммуникации индивидов т'-й и m-й подгрупп; t e [t0,t1] - момент времени ([t0, t1] - временной интервал анализа).
Отдельно следует уточнить, что в формируемом решении на основе математических приближений вида (1) не исключается возможность комбинации моделей информационного противоборства в структурированном социуме с активными сетевыми структурами, к примеру, применяемыми для оценки измеряемых параметров α mk , β mk , γ mk [12]. Недостаток моделей информационного противоборства в структурированном социуме [2, 4, 10] состоит в детерминированном определении их параметров ( α mk , β mk , γ mk ), что не позволяет в полной мере оценить степень различия между исходными факторами ( x mk , y mk ) конкурирующих субъектов.
Для устранения указанного недостатка в работах [11, 13, 14] в развитие [2, 4, 10] предложено вводить флуктуацию в измеряемые параметры модели – интенсивности α mk и γ mk . При этом за методологическую основу составления стохастических математических моделей в [11, 13, 14] выбрана теория марковских процессов и процессов диффузионного типа [15, 16]. Для увеличения точности оценки x mk , y mk на фоне наблюдаемых α mk , γ mk , содержащих стохастические компоненты с параметрами отличными от нормального закона распределения [17], в [18] при введении дополнительного фиктивного стохастического дифференциального уравнения состояния разработана схема нелинейной фильтрации. Она предполагает сведение задачи анализа исходного стохастического дифференциального уравнения к численному решению уравнения Дункана–Мортенсена–Закаи [19] спектральным методом Галёркина [20].
Основной недостаток решения [18] заключается в фиктивном введении стохастического дифференциального уравнения состояния (составляется из исходного при оценке стохастических компонент наблюдаемых интенсивностей агитации методами полиспектрального анализа [21]) в формировании модели оптимальной нелинейной фильтрации оценок информационного воздействия.
Цель настоящей статьи состоит в устранении указанного недостатка [18] при разработке вычислительно эффективного решения обобщенной задачи оптимальной нелинейной фильтрации оценок информационного воздействия в стохастических моделях информационного противоборства. Для достижения сформулированной цели в развитие результатов [18] необходимо решить следующие задачи:
-
1) формализовать постановку задачи оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства, не предполагающую введения фиктивного стохастического дифференциального уравнения состояния;
-
2) в разрабатываемой задаче оптимальной нелинейной фильтрации при определении эволюции функции плотности вероятности уточнить особенности применения робастного уравнения Дункана–Мортенсена– Закаи [22];
-
3) определить численную схему решения задачи оптимальной нелинейной фильтрации и при систематизированном представлении последовательности действий по получению оценок информационного воздействия в стохастической модели информационного противоборства, уточнении и конкретизации особенностей программной реализации составить соответствующий вычислительный алгоритм;
-
4) выполнить сравнительное апостериорное исследование разработанного алгоритмического решения при выделении особенностей по устойчивости предложенной численной схемы и точности получаемых
-
2. Постановка задачи оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства. Рассмотрим динамическую модель вида (1) для начальных условий x mk (t 0 ) = y mk (t 0 ) = 0, положив, что значения интенсивностей α mk , β m ′ m , γ mk зависят от t и складываются из истинных величин 0 < a mk (t) , в т ‘ m (t), Y m k (t) < ^ и шумов наблюдения a mk (t), в т ’ т (t), Y mk (t) с соответствующими статистическими параметрами: E [a mk ] = E [/3 m‘m] = E [Y mk ] = 0;
cov [a mk , a m ‘ k ‘ ]
оценок.
Для общности представлений стохастической модели информационного противоборства, в отличие от [18] установим зависимости от времени и наличие стохастической компоненты в интенсивности межличностной коммуникации β m ′ m .
dt · εαmkm′ k′ ; cov βm′m, βj′j m′ mj′j ;
cov [7 mk , 7 m ‘ k ‘ ] = dt • e mkm ‘ k ‘ (k,k e {!,K}; m,m ' ,j,j ' e {1,M}). Опираясь на представления [11, 13, 14, 18], запишем (1) в виде системы стохастических дифференциальных уравнений:
dZ = A (Z, A 0 , B 0 , Г 0 ,t J dt + S ( Z, t\
dW,
где A (a mk ) m x k ; B (в т ‘ т ^ м xM ; Г (Y m k ) M xK .
Способы определения элементов вектора переменных Z , вектора
⃗
⃗
сноса A , диффузионной матрицы Σ и вектора шума W , с учетом (1) и представлений [11, 13, 14, 18], уточнены в приложении.
Уравнение (2) устанавливает правило измерения численности адептов и предадептов в структурированном социуме при наблюдаемых интенсивностях α mk , β m ′ m , γ mk . Потенциально соответствующие параметры α mk , β m ′ m , γ mk возможно определять различными методами при обеспечении условия некоррелированности шумов наблюдения. Так, например, интенсивности α mk и γ mk распространения положительной и отрицательной информации о k -м кандидате в m -й подгруппе социума допустимо задавать отношением числа сообщений соответствующей тональности (положительная и отрицательная) к периоду времени наблюдения при учете их объема и вероятностных характеристик тональной оценки [18]. При этом соответствующая вероятностная оценка отдельного сообщения может получаться при применении различных алгоритмических решений. Они, например, программно-реализованы в таких библиотеках python как Dostoevsky, TextBlob, BERT, ruGPT-3 или представлены в виде самостоятельных программ [18, 23]. Их основу составляют алгоритмы машинного обучения и словарные методы [23]. Также и величина β m ′ m может определяться различными не взаимоувязанными способами. Частное решение по нахождению β m ′ m приведено в [24].
Указанное позволяет справедливо предположить о наличии второго независимого от первого правила наблюдения a mk , в т ‘ т , Y'mk соответствующих параметров интенсивностей α mk , β m ′ m , γ mk в модели (1) при неопределенности в предпочтительности первого и второго правил наблюдения. При этом аналогично α mk , β m ′ m , γ mk интенсивности a mk , m'm‘ m , Y mk складываются из истинных величин a mk , e m ‘ m , Y m k и шумов наблюдения <5t'mk (t) , mm'^m ‘ m (t) , Y mk (t) с соответствующими статистическими параметрами: E [a mk ] = E [,3 m‘m| = E [Y mk ] = 0;
cov [a mk ,a m ‘ k ‘ ] = dt • ^r ^km ’ k ’ ; cov ^m ‘ m ,e ‘j]
dt · ε
. в m′ mj′j ;
cov [Y mk , Y m ‘ k ‘ ] = dt • ^mkm ’ k ’ • В этой связи, запишем вторую систему стохастических дифференциальных уравнений наблюдения за численностью адептов:
dZ ' = A Zz ' , A 0 , B 0 , r 0 ,t) dt + S ' Zz ' ,t) dV, (3)
где элементы вектора переменных Z ′ , вектора сноса A , диффузионной матрицы Σ ′ и вектора шума V⃗ , задаются аналогичным (2) способом (см. приложение) при учете правил определения α ′ mk , β m ′ ′ m , γ m ′ k .
Уточним, что уравнения (2), (3) будем понимать в смысле Ито [16].
Я
Задача фильтрации состоит в получении оценок Z = I Z l I числа адептов и предадептов k -го субъекта m -й подгруппы в момент времени t ∈
Я
[t 0 , t 1 ] из заданных уравнений (2), (3). Оценку Z выполним по критерию максимального правдоподобия:
Z = arg max
Z⃗ ∈ Ω
p Z, t
где p Z , t – апостериорная условная функция плотности вероятности распределения .Z е П.
Функцию p ^Z, t^ при p ^Z, t^ = ф ^Zi, t) j R ф ^Zi, t) dZ определим по теореме сложения вероятностей [26] из:
как вероятность суммы двух совместных событий, наступающих при составлении следующих двух пар уравнений состояния и наблюдения для формирования модели оптимальной нелинейной фильтрации: 1) уравнение (2) задается состоянием, а (3) – наблюдением; 2) уравнения состояния и наблюдения определяются в обратном порядке.
В этом случае, эволюцию апостериорных условных функций плотности распределения вероятностей p1 Z⃗, t , p2 Z⃗ , t из (5) при p1,2 (Z, t) = *1,2 (Z, t) ^f *1,2 (Z’t) d"Z и заданном начальном условии *1,2 ^Z, t0^ = p0 (zj определим из решения уравнений типа Дункана–Мортенсена–Закаи (ДМЗ) [18, 19]:
d* 1,2 (Z,t) = L 1,2 [^1,2 (Z,t)]dt+
+*1,2 (Z,t) [A2,1 (Z,t)]T [D(2,1)) (t)] 1 dZ2,1, где A (Z,t) = AyZ, A, B, Г,#); A2 (Z,t) = AyZ, A, B', r',t); A = (amk)MxK; B = (em‘m)MxM; Г = (Ymk)MxK; A = (amk)MxK; b' = (em‘т)мXM; Г' = (Ymk)mXK; D(1) = №)„ „ = ssT; d(2) = X / dxd
(D(,A = S'S'T; d/B2 1 - приращение вектора .Z, определяемое ll dxd уравнениями (3), (2) соответственно; L1,2 [^] - диффузионные операторы
Фоккера–Планка–Колмогорова [19]:
d Л 1 d dд2
L12 и =—X dZ [A-0] + 2 XX dZddZ- [D»-21*]- l=1 l l=11‘=1l l
Уточним, что в заданных в выражении (6) обозначениях для определения функции *1 используются операторы и функции с соответствующим первым индексом - L1, A2, D(2) и dZ2. Для нахождения *2 применяются компоненты из (6) с соответствующим вторым индексом. В последующих соотношениях будем придерживаться указанного правила.
Сформированные представления (4)–(6) формализуют исходную постановку задачи оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства при выполнении условий нормировки [13, 14]: R p(Z,t\dZ = 1; Rp 1,2 (Z,t)dZ = 1;
Q Q
p(Z,t) > 0; P 1,2 (Z,t) > 0.
Следуя результатам [25, 27], для повышения точности численного решения задачи нелинейной фильтрации при снижении чувствительности фильтра к дискретному во времени изменению траектории наблюдения для
P i,2 ( Z, t o) = p0 ZZ\ уравнение (6) представим в робастном виде [27]:
T
"t^T = - dt ( 'T | Ml ) Z 2,1 P 1,2 +
+ exp {-A T ,i D Z 2,i} [L i,2 - 2 4, 1 [ D^ ] - a4 2,1] x (8)
X [exp {4,1 [D(2,1)] 1 Z2,1} P1,2] , при обозначении:
^ 1,2 = exp 1-Д ,1 [ d (2 , 1) ] Z^A P 1,2 .
Для заданной постановки задачи (4), (5), (8), (9), учитывая результаты [11, 13, 14, 18, 25, 27], сформируем численную схему оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства.
-
3. Численное решение задачи оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства. Наибольшую трудоемкость и основу в сформированной задаче фильтрации (4), (5), (8), (9) составляет решение уравнения (8). Его исследование выполним в постановке спектрального метода Галёркина [20] при дискретизации интервала наблюдения [t 0 , t 1 ] на тактовые подынтервалы t G [т п , т п +1 ] (At = т „+1 - т „ ; n = 0, N - 1; N = (t 1 - t o )/ At) [28]. Следуя утверждению 1 [25] (утверждение 2.1 [27]), для заданной дискретизации t G [т п , T n+1 ] в формируемом численном решении сведем задачу (8), (9) к рекуррентному решению последовательности подзадач, составляющих основу Yau-Yau’s алгоритма [25]:
^1,2 ( Z, Тп-1) = ^1,21 (Z,T„-1) X где при Ф1 2 ( Z, то ) = Ф1 2 ( Z, to ) = Р0 (Z I значения ф 1 2 ( Z, тп-1 определяются из решения прямого уравнения Колмогорова [25]:
^ФГ- 1 (z,t) = l 1,2 [фп, - 1 (z,t) ]
T 1
- 2Ф П,-1 (z, t) [>12,1 (Z, t)\ [d (2 , 1)) (t )J >1 2,1 (z, t) .
Учитывая результаты [13, 14, 18], решение прямого уравнения Колмогорова (11) выполним численно при введении следующих представлений.
U
S w (u) набором из U симплексов u=1
= 1 ) Л ( V i = 1,d + 1, Z (u) > 0B C
Зададим разбиение П =
/ , C d+ 1 \ 1 X ( d l z ,
^ (u) = j P z iu p iu : P z iu I i=1 \i=1
R d (u =1,U) с d + 1 вершинами P 1 (u) , P 2 (u) ,..., P d+)1 и барицентрическими координатами Z (u) ,..., Z d+)1 при ш (и) ^ ш (и ) = 0 (u = u ‘ ; u, U E {1, U}).
Обозначим (• , •) □ скалярное произведение:
⟨ η, ϕ ⟩
ηZϕZ
- 2^ dZ,
для некоторых функций η и ϕ.
Зададим аппроксимацию <^П,2 ^Z, t^ ненормированных функций
Ф П,2
плотности вероятности:
U
Ф П2 (Z,t) = ЕЕ c !j2) (t) j (Z), u=1 j e J d
подстановка которых в (11) в проекционном представлении метода Галёркина сведет исходную к системе обыкновенных дифференциальных уравнений:
G⃗
de (1,2) (t) = S - 1 ( l (1 , 2) (t) - Q (1,2) (t)) 6 (1,2) (t);
dt (14)
C (1,2) (0) = S - 1 G.
В выражениях (13), (14) приняты следующие обозначения:
vec ( G ) при G
П /(u)\
К№*j /J
; vec ( • ) - операция U X| j d |
векторизации матрицы; C (1,2) = vec ( C (1,2) ) - вектор искомых
коэффициентов разложения, зависящих от t, при C (1,2) =
(c (1>2)) ; l (1 , 2) = £ 1,2 [vO ) ; Q (1,2) =
\ uj Zu x| J d | \\ 5 , I 5 J/Q/ U rX U r
(/ i (u) Л*Г Гтл(2 D) Л/Л1 —1 л i (u‘) \ A c* (/ i (u) i (u‘) \ A
* j ’,A2a [D( • " t А,# '’ U r x U r ; S = (. ^* j ',* 5' )„) U r U r = U |J d |; u,u' E {1,U}; J d - множество мультииндексов j,j' E J d [13,14]:
J rd
| j = (j 1 , .
. . , j i , .
. . , j d+1) : j i E Z + ,
X. 1
ji = r , i=1 )
где r E N - порядок аппроксимации на w (u) ; Z + = N U { 0 } ; * ju) -базисная функция частичной подобласти w (u) E fi, которую зададим произведением:
d+1
*ju) = П фji i=1
Гауссовых базисных функций [29]:
Ф j i = exp
J - [2j i + 1 - 2Z i (r + 1)] 2 [ 2(d +1)
I
Принимая во внимание заданную дискретизацию временного интервала анализа и выбранную рекуррентную схему (10) оценки 754 Информатика и автоматизация. 2023. Том 22 № 4. ISSN 2713-3192 (печ.)
ISSN 2713-3206 (онлайн)
^ 1,2 , решение обыкновенного дифференциального уравнения (14) для соблюдения компромисса между точностью, вычислительной устойчивостью и сложностью выполним методом Эйлера [30]:
С (1,2) — С (1,2) I { Q-1 Г(Т (1,2) _ П(1,2) Х Г (1,2) 1Х Л S')
C n = C n - 1 + ^t "^S ^L n - 1 Q n - 1 J C n - 1 J J, (18)
где C n1,2) = C (1-2) (T n ); L„ ,2) = L (1,2) (r n ); Q^ ,2) = Q (1,2) (T n ).
(1,2)
Вычисленные выражением (17) коэффициенты C n , с учетом (10) и аппроксимации (13), нормируются по правилу:
С (i,2) = c (1,2) /( c (1,2) С^ n nn / l^n ^ j ,
а затем уточняются соотношением:
(5 n1’2) = S - 1 [Q n^ C n1,2)] , (20)
где Q , (1,2) = (D^ ju) , exp {A T ,1 [ D (2,1) ]
-
1 dZ 2 ,A ^ (u)) ) при ) j /л/ U r X U r
Q n(1,2) = Q , (1,2) (r n ) и рассчитываемых элементов ^A 2,1
~
в момент времени r n ; Ф
Ф uj = R ^ ju) (Z) dZ .
vec
при Ф =
, D (2,1) , dZ 2,1 uj ) u x J d | для
w ( u )
Определение искомой функции плотности вероятностей p Z⃗ , t в момент времени τ n осуществляется при ее аналогичной (13)
U (u)
аппроксимации -p Z?,t) = P P c uj (t) ^j- (Z), где коэффициенты
-
4 2 u=1 jeir v 2
c uj для (C = vec ( C ) и C = (c uj ) U x| j d | задаются при дополнительной нормировки (19) полученных (5 nn1,2) из (20) по правилу:
Cn = c n1) + c n2) - S - 1 C n ; C n = C n/ (с п ф) , (21)
⃗ где Cn = С (Tn); Cn =

для C n
vec I C n I при C n =
((^n^,^ (u)\ )
V\ j /nU и x| j d|
.
Поиск максимума
(4) осуществляется методом Ньютона [31] ^
для начального приближения Z 0 , выбираемого с учетом следующего
a U выражения: Z0 = P P CujФ^и), где Ф^и) = JM(u) Z^(u \^z\dLZ.
u=i jeJr v 7
В целом, перечисленные правила вычисления эволюции функции ^
Z , τ n и оценки Z составляют суть численного решения задачи оптимальной нелинейной фильтрации
оценок информационного воздействия в стохастической модели информационного противоборства. Исследование вопросов существования, единственности и сходимости сформированного численного решения при неизменности операторных представлений в (11) и выбранной системы базисных функций согласуется с результатами [13, 14, 18]. Задание элементов векторов и матриц в (18), (20) обеспечивается численным вычислением интегралов вида (12) с применением кубатурных формул [14] для симплексов [32]. Также для минимизации вычислительных затрат при расчете матриц S, Q^1,2), Cn из (18), (20), (21) соответственно учитывается их симметричность, а нахождение элементов матриц S, Cn реализуется аналитически через функции ошибок (используются результаты, полученные при доказательстве лемм из [13]). Последнее определяет дополнительную предпочтительность применения в качестве аппроксимирующих полиномов Гауссовых базисных функций (16) в сравнении с другими U видами специальных функций [33]. Алгоритм разбиения fi = S w(u) u=1
набором из U симплексов при формировании триангуляции [34] уточнен в [14]. Эффективный алгоритм формирования множества мультииндексов (15) приведен в [35].
Для систематизированного представления последовательности ^
действий получения Z по составленному численному решению, приведем алгоритм оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства. При формировании алгоритма используем результаты [13, 14, 18, 36].
-
4. Алгоритм оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства. Входными данными
алгоритма являются: 1) временной интервал анализа [t 0 , t i ]; 2) число отсчетов дискретизации N; 3) число K субъектов, в отношении которых формируются предпочтения у индивидов; 4) количество M подгрупп в социуме; 5) численность индивидов N m в m-х подгруппах U
социума; 6) порядок аппроксимации г; 7) разбиение fi = S w (u) ;
u=1
8) наблюдаемые матричные функции интенсивностей A , B , Г и А ’ , В ’ , Г ' ; 9) начальное распределение функции плотности вероятности
p
= P o
-1 exp
σ 0
Z T S o Z I , где ^ 0 - нормирующий
множитель, обеспечивающий выполнение условия R p 0 (Z) dZ = 1;
Q ' 2
s o = (=?,‘) d , d .
Выделим основные этапы работы алгоритма, полагая неизвестными а в Y / а 'в ' Y
параметры ε mkm ′ k ′ , ε m ′ mj ′ j , ε mkm ′ k ′ , ε mkm ′ k ′ , ε m ′ mj ′ j , ε mkm ′ k ′ .
Шаг 1. Методом полиспектрального анализа [18, 21] в
отношении функций a mk , в т ’ т , Y mk , a' mk , e m ‘ m , Y m к выполнить оценку соответствующих величин интенсивностей Ck, e m ‘ m , ^ mk , a ' mk , e ' m ‘ m , у mk и усреднением a mk = о, 5 ^m k +, C ‘ m = 0, 5 (3 m ‘ m + Z m’m) , Y m k = 0, 5 (i m k + Y 'm,k) определить приближения для соответствующих истинных значений интенсивностей.
Шаг 2. По средневыборочным правилам [35] для α mk , β m ′ m , Y mk , ^ mk , e m ‘ m , Y mk и найденных Q mk , e m ‘ m , Y m k определить оценку соответствующих параметров ε α mkm ′ k ′ , ε β m ′ mj ′ j , ε γ mkm ′ k ′ , ε m α km ′ k ′ , ε m β ′ mj ′ j , ^ mn,km ‘ k ‘ для задания ковариационных матриц шума D (1,2) .
Шаг 3. Положить n = 0 и установить начальные значения ZZ n = 0, z ni,2) = 0, Z n = 0.
Шаг 4. При заданной p 0 ZZ^ определить (D n = C7 n1,2) = S 1 Gv.
Шаг 5. Для момента времени τ n вычислить ковариационные
(1,2) матрицы D n
.
Шаг 6. По методу Эйлера (Эйлера–Маруямы [37]) выполнить экстраполяцию 2?П+1 с учетом моделей (2), (3):
у (1) _ у (1)
Z n+1 = Z n
+ At.A (^ П1) , А , В , Г , T n ) ;
7 (2) 7 (2) I AfZ (7 (2) a' r' T' -t ) Z n+1 — Z n + ^tA I Z n , A , B , 1 , T n ) .
Шаг 7. Учитывая представления (14), (18), для τ n рассчитать т (1,2) ,^(1,2) матрицы L n , Q n .
Шаг 8. Если n > 0, то:
-
a) принимая во внимание (20), рассчитать:
C ni,2) = S
[ Q ■.,
где Qn(1’2) = Q'(1 ’2) (тп), пои О'(1,2) - f/^(u) хо//т G'(2Д)0 ^ G'(1’2) - при Q — \j3 , exP |A2,1Gn j Tj' / для Gn —
Гп(1,2) 1 - 1 f G (1,2) _ G (1,2) \
[D n J ^Z n Z n - 1 J;
-
б) нормировать полученные векторы С n1,2) по правилу (19).
(1,2)
Шаг 9. С учетом выражения (18), вычислить С пЗ 1 с последующей нормировкой результата соотношением (19).
Шаг 10. С учетом выражения (21), рассчитать (3 п +1 .
Шаг 11. Для найденного (5 п +1 по правилу (4) методом Ньютона [31]
Д определить оценку Z n+1 .
Шаг 12. Увеличить n — n + 1 и проверить условия:
-
а) если n < N , то перейти к шагу 5;
-
б) если n — N , то завершить работу алгоритма и вывести результат Д Д Д
вычисления - Z 0 , Z 1 ,..., Z N - 1 .
Псевдокод сформированного алгоритма оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства, с учетом указанной общей последовательности действий, приведен в виде листинга 1 – функция FilterRatings .
Вспомогательные функции в приведенном листенге 1 реализуют следующие вычислительные процедуры:
-
1) Polyspect Estim – определение приближения для соответствующих истинных значений интенсивностей a ^k , в т ‘ m , Y m k (шаг 1 алгоритма);
function F lLTER R ATINGS (t o ,t i ,N, K, M N i_____ N M Д ,p o ,
A , B , Г , A ‘ , B ‘ , Г ‘ ){
( A 0 , B 0 , Г 0 ) = P OLYSPECT E STIM ( A , B , r , A ‘ , B ‘ , r ‘ );
( e a , 6 е , 6 Y , 6 ‘a , 6 ‘e , 6 ‘Y ) =
C ALC V ARIANCES ( A 0 , B 0 , r 0 , A , B , r , A ‘ , B ‘ , Г ‘ ); n = 0;
( 1,2 )
Z n = 0; 2 П = 0; Z n = 0;
-
△ t — ( t i - t o )/ ( N — 1 ) ; T n — t o ;
S — 1 •-"',-'" .-V. ,.: G P ^Л’
( 1,2 )
C n — C ALC SLAE( S ,G); C n — N ORM V ECTOR (C n ); С П — C n ;
while (n < N) {
D n 1 ) — D IFFUSION E STIM ( e a , e e , e Y ДП^ );
о П 2) — D IFFUSION E STIM ( e 'a , e 'e , e 'Y , Z n2 ) );
Z n + 1 — Z n1 ) + △ t A ( Z n i) , A , B , Г , T n ) ;
Z n + 1 — z n 2) + A tA^ n 2 ) , A ' , B ' , r ' ,T n ) ;
L n i2) — L (12) ( A 12 , D n 12) ,T n ) ;
Q n 1 2 — Q (1 , 2) ( A ,1 , о П 2,1) ,T n ) ;
if (n > 0) {
G n (1,2) — [ D n i,2) ] -1 ( Z n i,2)
z (1,2)v Z n - 1 ) ;
Q n ( 1, 2) — Q '(1 , 2) ( A 2,1 , G n (1,2) ,T n ) ;
( 1 2 ) ' ( 1 2 ) ( 1 2 )
C n — Qn C n ;
C n1 ,2) — C ALC SLAE ( S , C n1 ,2) ) ;
Cn1,2) — NORM VECTOR(Cn1,2));} dC(1,2) — (Ln12) - Qn1,2))Cn1,2);
dC (1,2) — C ALC SLAE ( S , dC (1,2) ) ;
(1,2) (1,2)(
Cn+1 — Cn +AtdC
(1,2)(
C n + 1 — N ORM V ECTOR ( C n + 1 ) ;
^ ^z z ( 1,2 )
T n + 1 T n + A t ; C n + 1 C ( C n + 1 ,T n + 1 ) >
C n + 1 — C ALC SLAE ( S , C п + 1 ) ;
-
( 1 ) ( 2 )
C n + 1 — N ORM V ECTOR ( C n + 1 + C n + 1 - C n + 1 ) ;
Zn+1 — ARGUMENTMAXIMUM(Cn+1); n — n + 1;} return (Zo,.
.
. , Z N - 1 )}
Листинг 1. Оптимальная нелинейная фильтрация оценок информационного воздействия в стохастической модели информационного противоборства
-
2) Calc Variances – средневыборочная оценка параметров ε α mkm k ′ , ε β m mj ′ j , ε γ mkm k ′ , ε ′ m α km k ′ , ε ′ m β ′ mj ′ j , ε ′ m γ km k ′ (шаг 2 алгоритма);
-
3) NormVector – нормировка (19);
-
4) DiffusionEstim - вычисление ковариационных матриц D (,L2) (шаг 5 алгоритма), с учетом правил задания матриц Σ , Σ ′ , уточненных в
приложении;
-
5) Argument Maximum – максимально правдоподобная оценка Д
Z n+1 в соответствии с правилом (4) при численном нахождении оптимума методом Ньютона [31] (шаг 11 алгоритма);
-
6) Calc SLAE – решение системы линейных алгебраических уравнений [38].
-
5. Результаты вычислительного эксперимента. Для апостериорного исследования предпочтительности полученных результатов проведем серию вычислительных экспериментов при решении задачи моделирования и оценивания стохастической модели информационного противоборства вида (2), (3) для K = 2, M = 1 (малые значения K , M выбраны из соображений наглядности демонстрации графических результатов вычислительных экспериментов). При проведении указанных испытаний особое внимание уделим результативности сформированного алгоритма (листинг 1) при вторичном уточнении его устойчивости и вычислительной сложности. Выделенные свойства алгоритма при изменяемом уровне нестационарного негауссовского шума в наблюдаемых интенсивностях моделей (2), (3) апостериорно установим при сравнении данных моделирования
Д точного решения X0 = (xk)K, Y0 = (y0)K с оцениваемыми: 1) Z по
Д средневыборочным правилам Z = ( Z + Z‘ I /2 результатов наблюдений
Д/
Z⃗ , Z⃗ ′ из моделей (2), (3) соответственно; 2) Z⃗ ′ из моделей (2), (3)
Д/ ансамблевым расширенным фильтром Калмана [39]; 3) Z′ алгоритмом фильтрации, основу в котором составляет численное решение уравнения ДМЗ (6).
В качестве истинной модели информационного противоборства при проведении вычислительных экспериментов произвольно выбрана следующая система обыкновенных дифференциальных уравнений:
dy 0 = dt
X N o
Y k (xk - y 0 ) + (a k + x) - P (x k ‘ + y 0 ‘ ) - y o l;
k ′ =1
X
dx 0 k dt
y0 [ak + e0xk] - Yoxk; xk = 0; y0 = 0; k = [1; 2], где a0 (t) = 0, 25 |1 + 2cos (15t)|; a^ (t) = 0, 25 |1 + 2sin (5t)|; в0 (t) = 0,005 |2 + 5cos(0,1t)|; yO (t) = 0,05 |sin(20t)|; y0 (t) = 0,1 |cos(2t)|.
Решение (23) при определении эволюции -X 0 = (x k ) K , Y 0 = y k 0 K осуществляется числено методом Эйлера для аналогичных (22) N , At.
При обеспечении условия формирования в компонентах αk , β, γk и α′k , β′ , γk′ нестационарного негауссовского шума для моделей (2) и (3) соответствующие наблюдаемые интенсивности заданы следующими правилами:
-
1) a k (t) = | a 0 (t) -N (0,q i ) | , в (t) = | в 0 (t) —N (0, q i ) | , Y k (t) = | Y 0 (t) —N (0,q i ), где N (0, q i ) - функция генерации случайных чисел, подчиняющихся нормальному закону распределения со средним 0 и дисперсией q 1 ;
-
2) a k (t) = |a k (t2 + R ( q - 1 / 2)|, в ’ (t) = |в 0 (t) + R ( q-1 / 2)|, Y k (t) = | Y 0 (t) + R ( q 2 1 / 2)|, где R ( q - 1 / 2) - функция генерации случайных чисел, подчиняющихся экспоненциальному закону распределения со значением показателя экспоненты равным (2q 2 ) - 1 .
Другие входные данные алгоритма заданы следующими величинами: t 0 = 0; t 1 =4; N = 480; N 0 = 10; r = 33; q 1 = 0, 5; q 2 = 0, 25.
Для компактности представлений результаты вычислительных экспериментов приведем в отношении значения суммы адептов и предадептов k-го кандидата ^k (t) = xk (t) + yk (t).
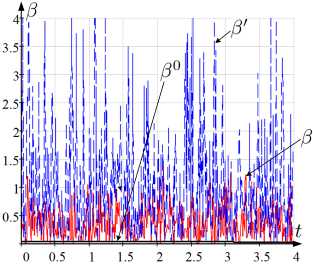
На рисунке 1 представлены графики зависимости от времени элементов векторов численности адептов: 1) истинного ^w ^w
~
~.
ξ k 0 ; 2) определяемого среднего ξ k из моделей (2), (3); 3) оцениваемого ξ k ′ ансамблевым расширенным фильтром Калмана [39]; 4) оцениваемого l,'k по алгоритму фильтрации, предполагающему численное исследование уравнения ДМЗ (6); 5) оцениваемого ξ k по разработанному алгоритму, основанному на численном исследовании робастного уравнения ДМЗ (8).
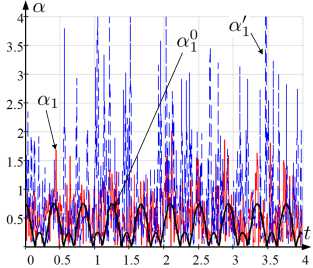
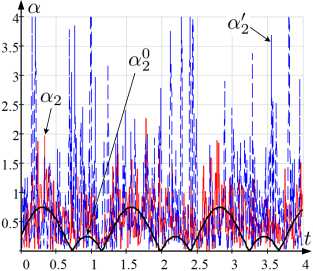
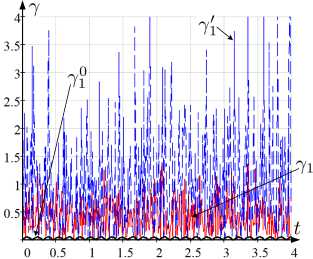
На рисунке 2 отражены графики наблюдаемых и истинных значений интенсивностей a k , в, Y k , a k , в ’ , Y k и a k , в 0 , Y 0 для t G [t o , t i ], используемых при оценивании ξ k 0 , ξ k , ξ k ′ , ξ k ′ , ξ k (рисунок 1).
На рисунке 3 приведены графики одномерного среза апостериорных условных функций плотности вероятности p Z⃗ , t , p 1 Z⃗ , t , p 2 Z⃗ , t в различные моменты времени t G [t 0 ,t 1 ]. Ориентация плоскости среза выбиралась по максимальному значению дисперсии относительно ^ оцениваемого по правилу (4) значению Z.
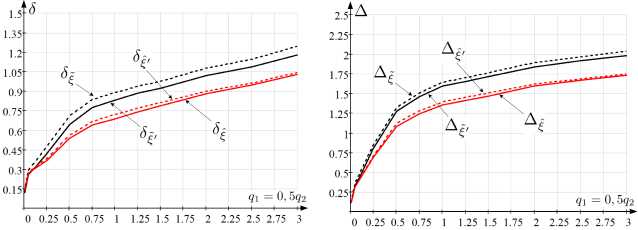
Количественно сравнительную предпочтительность получаемых результатов ξ k , ξ k ′ , ξ k ′ , ξ k по отношению к ξ k 0 установим величиной накопленной средней квадратической ошибки,
˜
значение которой, например, для ξ k определено по правилу
I N - 1 K I 2 I
△ ё = 1/N E E l € 0 (t n ) - ^ k (t n ) |
У n=0 k=1
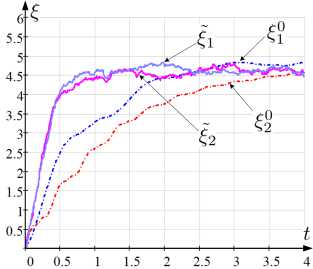
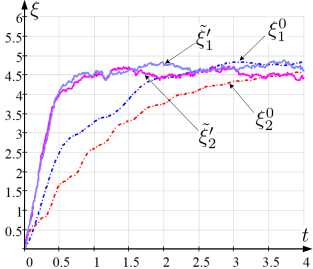
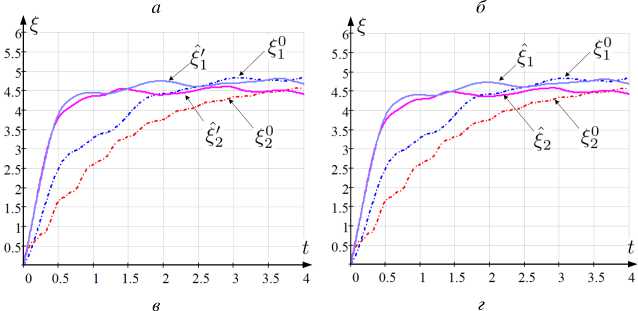
Рис. 1. Графики зависимости от t : а) ξ k0 , ξ k ; б) ξ k0 , ξ k′ ; в) ξ k0 , ξ k′ ; г) ξ k0 , ξ k
Также сопоставление результатов выполним при определении отклонения расчетного от истинного значения для заключительного момента времени K I I наблюдения: 5^ = ^ |$0(tN-1) — £k(tN-1 )| [40]. Для проведенного расчета (рисунок 1) при q1 = 0, 5, q2 = 0, 25 значения А и 5 составили: △ё = 1,11; А^’ = 1,076; А^ = 0,988; А^ = 0,945; 5^ = 0,366; д^ = 0, 275; §!‘ = 0, 231; 5^ = 0, 208.
а
в
б
г
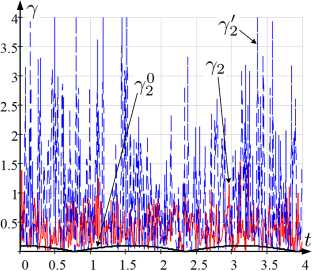
Рис. 2. Графики зависимости от t а) α 1 , α ′ 1 , α 0 1 ; б) α 2 , α ′ 2 , α 0 2 ; в) β , β ′ , β 0 ; г) γ 1 , γ 1 ′ , γ 1 0 ; д) γ 2 , γ 2 ′ , γ 2 0

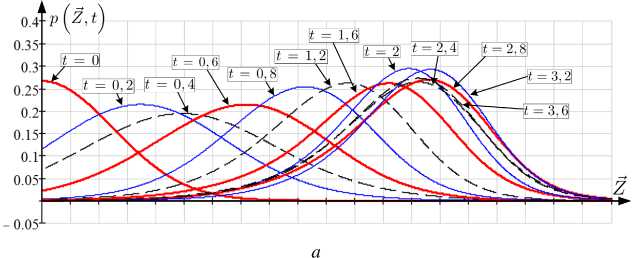
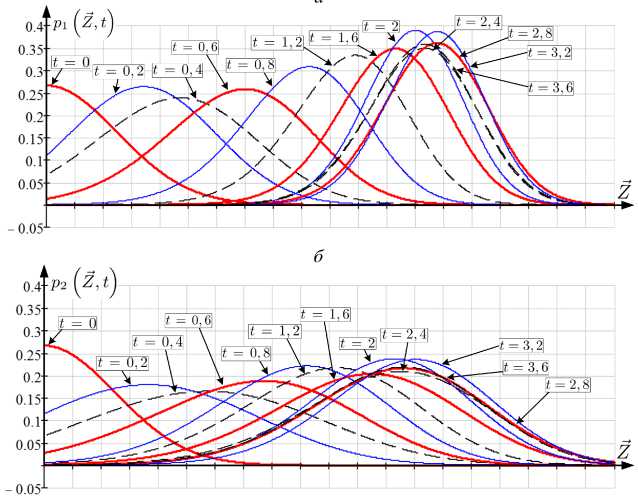
Рис. 3. Графики срезов для разных t : а) p Z⃗ , t ; б) p 1 Z⃗ , t ; в) p 2 Z⃗ , t
Полученные частные результаты (рисунок 1) свидетельствуют о том, что сформированный алгоритм обеспечивает более точную оценку в сравнении с известными решениями [11, 13, 14, 39]. При этом интерес вызывает исследование соотнесенного выигрыша при изменении q 1 , q 2 .
Очевидно, что при росте ошибок в наблюдениях α k , β, γ k , α ′ k , β ′ , γ k ′ вычислительная устойчивость составленного численного решения будет 764 Информатика и автоматизация. 2023. Том 22 № 4. ISSN 2713-3192 (печ.)
ISSN 2713-3206 (онлайн)
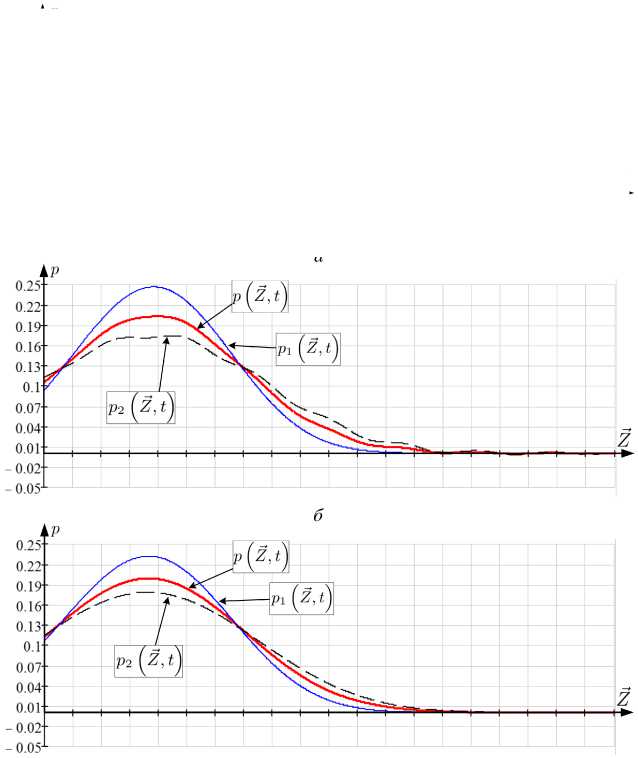
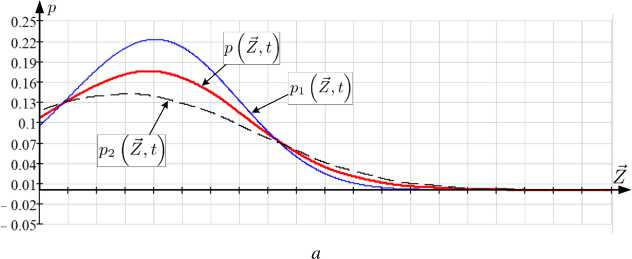
снижаться. Для ее повышения при сохранении адекватности нахождения функций p Z⃗, t , p1 Z⃗ , t , p2 Z⃗ , t требуется увеличить число точек дискретизации N на выбранном интервале наблюдения [t0 ,t1 ] (рисунок 4).
в
Рис. 4. Графики срезов p , p 1 , p 2 для t = 0 , 2 , q 1 = 0 , 75 ; q 2 = 0 , 5 q 1 , полученных при численном исследовании: а) уравнения ДМЗ при N = 480 ; б) робастного уравнения ДМЗ при N = 480 ; в) робастного уравнения ДМЗ при N = 500
Графическая иллюстрация отмеченной особенности приведена на рисунке 4 при представлении одномерного среза апостериорных условных функций плотности вероятности p Z^t t), p1 Z^t t), p2 Z^ t), рассчитанных при решении задачи фильтрации при применении уравнения ДМЗ (6) и робастного уравнения ДМЗ (8) (сформированный алгоритм) для t = 0, 2; q1 = 0, 75; q2 = 0, 5q1; N = 480 и N = 500. Из представленного примера (рисунок 4) следует, что на участках быстрого изменения числа адептов и предадептов (t е [0; 0,4], рисунок 1) при увеличении q1, q2 для недостаточного числа N при численном нахождении p (Z, t^, p1 (Z, t^, p2 (Z, t) наблюдается неравномерная (рисунок 4,б) сходимость выбранной аппроксимации вида (13). При этом в отношении применения робастного уравнения ДМЗ (8) в сравнении с простым уравнением ДМЗ (6) эта неравномерность проявляется более выраженно. Принимая во внимание указанное, выполнено сравнительное исследование точности сформированного решения при изменении q1, q2.
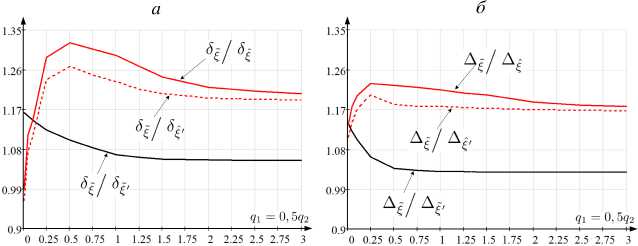
На рисунке 5 представлены графики зависимости усредненных по 10 6 вычислительным экспериментам Д ^ , Д ^^ ’ , Д ^- ’ , Д ^- , 5 ^ , 5 ^ ’ , § 1 ‘ , 5 - от q 1 , q 2 при q 1 = 0,5q 2 (указанная зависимость выбрана из соображений соизмеримости уровня шума в соответствующих наблюдаемых интенсивностях моделей (2) и (3)).
-
6. Заключение. Результаты проведенных вычислительных экспериментов (рисунки 1–5) подтверждают работоспособность разработанного алгоритмического решения оптимальной нелинейной фильтрации оценок информационного воздействия в стохастической модели информационного противоборства. Относительный выигрыш в сравнении со значениями, получаемыми по средневыборочным правилам наблюдения, в среднем равняется 20,7 % (рисунок 5). При этом аналогичный выигрыш применения ансамблевого расширенного фильтра Калмана составляет 7,4 %, а алгоритма нелинейной фильтрации, формируемого на основе исследования уравнения ДМЗ (6), – 17,3 %.
-
7. Приложение. В (2) приняты следующие обозначения: Z Е П
при Z = (Z l ) d = (z (1) , z (2) ,..., z (M) ) определяется численностью (m)\
адептов и предадептов относительно m-и подгруппы Am) = |^zk J = (x m1 , y m1 , x m2 , y m2 , • • • , x mK , y mK ) [18]; П ^ ^ X Y ^X . . . X e (M) c R d — d-мерный (d = 2MK) выпуклый многогранник (правила параметризации П определены в [13, 14]); e (m) С R 2K - симплекс с 2K + 1 вершинами [14]; A = (A l ) d = ( a (1) , a (2) ,..., a (M) ) - вектор a (m) = (п( m ) \ = ( fA f(2) fA fA fA fA ^
сноса при a ^a k j 2K ^f m1 , f m1 , f m2 , f m2 , . . . , f mK , f mK J
(2) для f mk =
K
N m У? (x mk ‘ + y mk ’ ) y mk
k ‘ = 1
Y m k (x mk y mk ) и f mk
M
y mk a mk + P e m ‘ m x m ‘ k
m ‘ = 1
M
armk + P e m ‘ m x mk +
m ‘ = 1
Y m k x mk ;
W = (W l ) d = (w (1) , w (2) ,..., w ( M ) ) для w (m) = (w km) ^ =
( R(1) R)^ rA rA rA rA^ ^ R(1) R(2)
B m1 , B m1 , B m2 , B m2 , . . . , B mK , B mK J при определении B mk , B mk стандартными винеровскими процессами; S = (S ll ‘ ) d x d = S a + S e +
вг
Рис. 5. Графики зависимости от q i , q 2 при q i = 0 , 5 q 2 : а, в) 5 ^ 5 ^ , 5 | ‘ , 5 | ; б, г) А ^ , А 1 ‘ , А ! ‘ , А ।
С позиции вычислительных затрат ансамблевый расширенный фильтр Калмана обладает преимуществом в сравнении со сформированным алгоритмом и способен при программной реализации на типовой ПрЭВМ обеспечить вычисления в режиме, близкому к реальному времени. По вычислительной устойчивости, определяемой равномерностью (рисунок 4(б)) сходимости выбранной аппроксимации функций плотностей вероятностей при одинаковой длительности интервала дискретизации ∆t, алгоритм, который основан на исследовании уравнения ДМЗ (6), обладает преимуществом в сравнении с разработанным алгоритмом (предполагает применение робастного уравнения ДМЗ (8)). Вместе с тем, по вычислительной сложности указанные алгоритмы сопоставимы и разработанный алгоритм обеспечивает наибольшую точность оценки. Таким образом, исходя из апостериорно определенного выигрыша по результативности решения (точноть оценки) при потенциальной возможности адаптивной вариации ∆t в зависимости от скорости изменения числа адептов и предадептов Z и уровня шума q1, q2 наблюдений а, в, Y, разработанное алгоритмическое решение обладает наибольшей предпочтительностью. Однако его применение в сравнении с ансамблевым расширенным фильтром Калмана становится нецелесообразным (рисунок 5) при малых значениях q1, q2 (снижение относительного выигрыша обуславливается вычислительной погрешностью в формируемых численных решениях по кусочно-полиномиальной аппроксимации и интегрированию).
В целом, полученные результаты в развитие работ [11, 13, 14, 18], формируют вычислительно эффективные решения обобщенной задачи оптимальной нелинейной фильтрации оценок информационного воздействия в стохастических моделях информационного противоборства при выделении особенностей основных этапов алгоритмической реализации. Составленный алгоритм применим при наличии неопределенности и разнородности правил измерения соответствующих интенсивностей α, β, γ модели (1). При наличии более двух разнородных правил подобного наблюдения, сформированный алгоритм может быть обобщен, при учете основных теорем теории вероятностей [26] и модификации правила определения итоговой функции плотности распределения вероятности (5). К направлениям дальнейших исследований относится получение априорной оценки, определяющей правило адаптивного выбора At в составленной численной схеме.
Σγ – матрица диффузии при:
^ a,e,Y —
α,β,γ
°11
σ
α,β,γ
M 1
α,β,γ
. " 1M
α,β,γ σ MM

α,β,γ σ mm ′
α,β,γ u 11mm'
α,β,γ
° K1mm ‘
. . ⃗σKα,Kβ,mm′
..s aKmYm ’
α,β,γ σ kk ′ mm ′
σα,β,γ σmkm′ k′ ga,e^Y
σ mkm ′ k ′

mkm ′ k ′
x mk V E mkm ‘ k ‘ ; ^
α mkm′ k′
αα ymk y^mkm’k’; umkm‘k‘
(TY , ,
σ mkm ′ k ′
β
σ mkm ′ k ′
Nm
K
P (xmk’’ + ymk’’) ymk P^\ k‘‘ = 1 J
α mkm'k';
γ β MM β
— (x mk y mk ) V e mkm ‘ k ‘ ; ° mkm ‘ k ‘ = ymk-I P P E j , mim l x j ’ k ;
У j=1 j ‘ = 1
Nm
K
У? (xmk’’ + ymk’’ k‘‘ = 1
) y mk
MM
εjβ′mjm j=1 j'=1
′ x j ′ k .
