Оптимальное и квазиоптимальное отождествление объектов при структурно-системном мониторинге обстановки

Автор: Разиньков С.Н., Решетняк Е.А.
Журнал: Физика волновых процессов и радиотехнические системы @journal-pwp
Статья в выпуске: 3 т.18, 2015 года.
Бесплатный доступ
С использованием критерия минимума среднего риска и оценок максимального правдоподобия однотипных параметров выполнен синтез оптимального алгоритма отождествления объектов, выявленных совместно функционирующими средствами мониторинга, в условиях априорной неопределенности признаков идентификации. Получена его квазиоптимальная модификация, позволяющая уменьшить размеры массивов признаков идентификации за счет установления приоритета целей с максимальной условной вероятностью отождествления. Исследованы статистические характеристики эффективности отождествления целей по результатам оценки их координат различными средствами мониторинга.
Структурно-системный мониторинг обстановки, отождествление целей, критерий минимума среднего риска, однотипные параметры идентификации, оценка максимального правдоподобия параметра объекта
Короткий адрес: https://sciup.org/140255928
IDR: 140255928
Optimum and quasi-optimum identification of objects at structural and system monitoring of situation
With use of criterion of a minimum of average risk and estimates of maximum likelihood of the same parameters synthesis of optimum algorithm of an identification of the objects revealed by in common functioning monitors in the conditions of aprioristic uncertainty of signs of identification is executed. Its quasi-optimum modification allowing to reduce the sizes of massifs of signs of identification due to establishment of a priority of the purposes with the maximum conditional probability of an identification is received. Statistical characteristics of efficiency of an identification of the purposes by results of an assessment of their coordinates are investigated by various monitors.
Текст научной статьи Оптимальное и квазиоптимальное отождествление объектов при структурно-системном мониторинге обстановки
Для повышения достоверности и полноты анализа обстановки в условиях априорной неопределенности и малой контрастности контролируемых объектов [1] используются методы структурно-системного мониторинга с совместной обработкой данных (сведений), добываемых разнородными средствами. За счет комплексного анализа демаскирующих признаков целей парируются их пропуски в отдельных каналах поиска (наблюдения), в том числе обусловленные мерами маскировки и снижения заметности [1; 2].
При структурно-системном мониторинге обстановки требуется выполнять отождествление данных (сведений), поступающих от независимых источников. Суть указанной процедуры заключается в установлении идентичности результатов поиска (наблюдения) в различных каналах путем сопоставления однотипных параметров и принятии решения о принадлежности признаков идентификации одному и тому же объекту [3; 4].
В предлагаемой работе на основе критерия минимума среднего риска [3; 4], обеспечивающего высокую надежность принимаемых решений при малом числе признаков идентификации [3], построены оптимальный и квазиоптимальный алгоритмы, найдены статистические показатели эффективности отождествления объектов [4] при наличии пропусков в сопоставляемых мас- сивах и использовании оценок максимального правдоподобия однотипных параметров [5].
Цель работы – исследование оптимального и квазиоптимального отождествления объектов при структурно-системном мониторинге обстановки.
1. Оптимальный алгоритм отождествления объектов с оценкой максимального правдоподобия однотипных параметров
Будем полагать, что отождествление выполняется между I объектами, выявленными первым средством мониторинга, с массивом признаков идентификации ^^(in)] в n-мерном пространстве, i = 1... I, n > 1, и J объектами с набором однотип- ных параметров
, j = 1... J, n > 1, зафикси- рованных вторым средством. Значения
и
^с j 7J определены со среднеквадратическими ошибками (СКО) массив Г|(n)!, j = 1^ J, n > 1, может содержать компоненты, не отождествля- емых ни с одним из элементов
E ( n ) ^ i
i = 1 _ I ,
n > 1, и наоборот.
Для идентификации объектов с однотипными признаками rI ( n ) ] и rI( n ) ], i = 1 ™ I , j = 1 ™ J , n > 1, по критерию минимума среднего риска R ps требуется установить принадлежность I компонентов rI in ) ], i = 1 ™ I , n > 1, определенных первым средством мониторинга, K i = I + J объектам
где R 0 – положительно определенная величина, 5a p — символ Кронекера, путем подстановки (5) в (2), а полученного результата в (1) находим правило отождествления объектов
( i' , k' ) = arg max P , s
i = 1 ^ I , k = 1 ^ KI
( I in ’;I ( n ’ ) ■
из числа J зафиксированных или I пропущенных
С учетом (3) представим (6) в виде
вторым средством мониторинга с массивом зна чений ГI(П)!, k = 1™Ki, n > 1, при условии [6]
( i' , k' ) = arg max Pa, i = 1 ™ I , k = 1 ™ KI
( I ! n l > ■ p |i * ;
I in ) l. (7)
^*
( i , k ) = arg min R p. , (1)
i=1™ I, k=1™ KI где
R ps = £ T;Rik Pps ( I ( n ) ; I ( n ) ) (2)
i = 1 k = 1
Условная вероятность ситуации отождествле- ( n ) ния объектов с однотипными параметрами I i
( n ) ^ ^
и I k , i = 1 ™ I , k = 1 ™ K i , n > 1, находится как произведение вероятностей того, что при гипо-
Rik – риск принятия решения об отождествле-
нии объектов с однотипными параметрами и _ I( n ) !, i = 1 ™ I , k = 1 ™ K , n > 1,
E ( n ) I i
P ps ( I( n ) ; I ^ ) ) = P ap ( I( n ) ) ■ P | I ^ )| I( n ) j (3)
тезе отождествления пары объектов ( i , k ) значения I(1 i ) , i = 1 ™ I , n > 1, принадлежат некоторой области Q ( n ) , n > 1, с размерами, определяемыми порогом принятия решения [3], в окрестности I kn ) , k = 1 ™ K i , n > 1, а любые другие значения
I ( pn ) , p ^ i , p = 1 ™ I , n > 1, располагаются пределами [3; 7]:
за ее
– апостериорная вероятность гипотезы об ото-
ждествлении объектов с однотипными параметрами Г! ” )~l и Г I k )~l, i = 1 ™ I , k = 1 ™ K , n > 1,
определенная в соответствии с теоремой гипо-
тез [3],
P ap ( I in ) ) -
априорная вероятность ус-
P | I ( n )| I ( n ) }= P | I kn )| I ( in ) ; ^ ( n )}x х П I 1 - P ( I kn )| I pn ) ; Q ( n )» , (8)
p = 1, p ^ i
ловия отождествления i -ого объекта, i = 1 ™ I ,
k = 1 ™ K ,
P
I
( n ) k
E ( n )
I i
условная вероятность ситуа-
ции отождествления k -ого, k = 1 ™ K , и i -ого,
i = 1 ™ I , объектов, выявленных различными
средствами мониторинга [4].
Ввиду того, что гипотезы, решения и ситу-
ации отождествления целей образуют полную
группу несовместных событий,
p I i ( n ) E ( n )) M p / E ( n ). S ( n )\
P I I k I i I и P ps ( I i ; I k )
для P ap ( i( " ) ) , выполняются
где p Г i (n) E (n). q ) _
P I I k I i ; ^ ( n ) I
Г f J ( n ) ; ( n T n r ( r )
= J w | I k I i J П d I i , ^ ( n ) r = 1
k = 1 ™ K , i = 1 ™ I , n > 1,
требования [4]:
ZX (K n > > - 1, ^ P I I k * I ( " > )- 1, i = 1 k = 1
£ fx ( I ( n ' ;i ( n ’ ) =1. i = 1 k = 1
Полагая, что риски принятия правильных решений равны нулю, а все неправильные решения приводят к одинаковым информационным потерям, т. е.
R ik = R 0 ( 1 — 5 ii' )( 1 — 5 kk' ) > (5)
( n ) k
E ( n )
I i
w

S ( n ) I k
¥
( n ) k
•
w I
E ( n )
I i
¥
( n ) k
– закон распределения однотипных параметров
при априорной неопределенности их истинных значений ¥ kn ) , k = 1 ™ K , n > 1,
w
I
I
( n ) k
¥(_ n )
I x n 2"Z(" ‘k')
r = 1
x exp [-
]E (
I
I r = 1 / |_ r = 1
('
W Ц ) Ц I " i
. X
^tpif r=1
( n . , . . . . 9 / Г n 9
exp- ] ( S ir ) "» kr ) ) 2 ] ( » i ) )
2 r = 1 / _ r = 1
– условные плотности вероятности признаков идентификации пары объектов ( i , k ) , i = 1 ™ I , k = 1 ™ K I , n > 1.
Вследствие априорной неопределенности параметров при вычислении апостериорной вероятности гипотезы об отождествлении объектов,
выявленных различными средствами монито-
( n )
ринга, истинные значения ¥ k 7, k = 1™ K , n > 1, в (10)–(12) заменяются оценками максимального правдоподобия [5]:
s( n ) -(a( n 1) - 2 + ] s( in 4a( n T
__________________________ i =1 ________________________
w ( n )_ ,
^ k = 1
( a( n -T + ] ( a( n ) ) - 2 i = 1
при k = 1 ™ J ;
] ц I n ) , ( a I n ) ) - 2
= 1
объектов и больших ожидаемых погрешностях измерений могут быть достигнуты такие же значения вероятности (9), что и для близких зна-
( n ) чений ц V'
и [ l( 1 n )
, i = 1 ^ I , n > 1, при малых
СКО a ( n ) и a( 1 n ) . Нормирующий множитель в (14) увеличивает информационные потери [3] для измерений, выполненных с низкой точностью [8; 9].
Полагая равными значения априорной вероятности условия отождествлении каждого i -ого объекта, i = 1 ^ I , с учетом (8)—(13) правило (7)
представим в виде
( i ', k ‘ ) = arg max P * | Ц — i = 1„. 1 , 2
k = 1„. K I
I (
i
где символ «*» означает, что условная вероятность (8) вычисляется при замене в (10) истинных значений признаков идентификации ^ -n ) их оценками максимального правдоподобия ^ kn ) , k = 1 ^ K I , n > 1.
2. Квазиоптимальный алгоритм отождествления объектов при структурно-системном мониторинге обстановки
] (a(nT i=1
при k = J + 1 ™ K i .
Алгоритм (15) позволяет выполнять оптимальное по критерию минимума среднего риска (1)
отождествление целей, выявленных совместно
функционирующими средствами мониторинга, в
условиях априорной неопределенности признаков идентификации.
Используя (10)–(13), несложно показать, что при отождествлении I объектов, выявленных первым средством мониторинга, с одним объектом, данные (сведения) о котором поступают от второго средства, закон распределения признаков идентификации (10) имеет вид
Однако для установления принадлежности
оценок максимального правдоподобия (13) пара-
( n ) метров ц у
и [ l( kn )
, i = 1 _ I , к = 1 ^ K I , n > 1,
соответствующим объектам требуется провести
сравнение значений условной вероятности ситу-
w
s ( • )
E ( n ) s i
ации отождествления
P *

i = 1 ^ I , n > 1, для
2„ ] n ; [ ( a ( r ) ) 2 + ( „( r ) ) 2
у r = 1 _
K i !
I ! ( K i — I ) !
s in)), к = 1™ Ki, возможных со-
четаний из KI по I . В системах измерительносигнатурной разведки MASINT – Measurement
And Signature Intelligence, включающих в свой
n
] ( s ( n ) -s 1n ) )
r =1 ________________________
2 ] [ ( a 1 , r) ) 2 + ( a^) ) 2
r = 1 _
состав средства радиолокационного обзора, оптико-электронные, акустические, сейсмические и магнитометрические датчики [1], си-
Из (9) и (14) следует, что при существенном различии значений однотипных параметров
стемах территориального контроля, раннего обнаружения и распознавания подвижных наземных целей REMBASS – Remotely Monitored Battlefield Sensor System и SOTAS – Stand off Target Acquisition, где для добывания данных
(сведений) об обстановке применяются оптикоэлектронные, акустические и сейсмические разведывательно-сигнализационные приборы [1], активно-пассивных системах радиолокационного обзора воздушного пространства [10] значения I и KI могут достигать нескольких десятков и сотен. Поэтому решение задачи отождествления объектов на основе (15) в реальном масштабе времени затруднено.
Для повышения быстродействия построенного алгоритма предлагается его квазиоптимальная модификация
( i " k " ) =
i ", i" = 1 ™ I , а за счет единичной ошибки отождествлена пара ( k ", i " ) , то объекты, образующие пару ( k', i ") также не подлежат правильному отождествлению.
3. Анализ характеристик отождествления объектов при априорной неопределенности однотипных параметров
Для анализа эффективности алгоритмов (15) и (16) на основе имитационного моделирования потока значений однотипных параметров [8; 9]
( n )
= arg max P* I s k 7 i=1™ I, V k=1™ KI
I ( n ) s i
найдены статистические характеристики ото-
p / =( n )
P * ( S k
£ ( n )
P * ( s k •
S( n ^o, S( n ) ) = o
ждествления объектов по оценкам их координат
Согласно (16), при идентификации объектов
в матрице условных вероятностей P * | S ( n )
। ( n ) s i
( n = 2):
S( 1)= :x i, si 2)= yi, i = 1™ I, s k1)= X k, S k2)= y k, k = 1™ Ki .
k = 1 ™ K i , i = 1 ™ I , n > 1, находится наибольший
Область Q
ограничена окружностью радиуса R ;
элемент, соответствующий ситуации отождествления k '-ой и i '-ой цели, k = 1 ™ K i , i = 1 ™ I . Идентифицированные результаты заносятся в
при этом (9) имеет вид
список выполненных отождествлений, а из ма-
трицы условных вероятностей ситуаций отождествления исключаются элементы k '-ой стро
ки и i'-ого столбца; в модифицированной ма-
P ( x k , yk | x i , y i ; q( 2 ) ) =
X k + R y k + ^ R 2 - ( X k - ^x i ) (18)
= 2 j j w ( x k, y k | x i, ij i) x x k - R y k x dyjidxi, i = 1™I, k = 1™Ki,
n трице P* ISk
S in ) I размером ( K i - 1 ) x ( I - 1 )
распределение w
снова осуществляется поиск наибольшего
( x k , y k I x i , y / i )
в явном виде
может быть получено из (10)–(12) путем замены
элемента. Указанные процедуры повторяются
L i = min ( I , J ) раз.
Исключение соответствующих строк и столб-
переменных (17) с введением унифицированных обозначений:
цов из исходной матрицы может выполняться пу-
тем обращения в нуль элементов P * I | ( n
I к( n и P * I s k
E (
i
I, k , k " = 1 ™ K , i , i " = 1 ™ I . При
этом общее число операций по отождествлению
объектов структурно-системного мониторинга
сокращается в LI раз.
Квазиоптимальный характер алгоритма (16) обусловлен возможными пропусками подлежащих идентификации целей, поскольку в k "- ой строке и i "- ом столбце, исключающихся из матрицы (8), могут содержаться элементы, имеющие большие значения, чем оставшиеся в модифицированной матрице. В результате возможно появление кратных ошибок отождествления после единичного ошибочного решения. Если истинная идентификация должна быть выполнена для пар целей ( k ", i " ) и ( k ", i ") , k , k" = 1™ K i ,
- ( 1 ) - ( 2 )
^ i -^ x , 'CT =CT y , i = 1 ™ 1 ,
(1) _ ^ ^ (2) _ ^ L. _ 1 K
CT k CT x , CT k CT y , k 1 ™ K I ,
при равной точности оценки однотипных параметров для всех I и KI объектов.
Вероятность правильного отождествления объектов Р 0 определялась как статистически
усредненное отношение числа правильно отождествленных целей к общему количеству выполненных отождествлений, вероятность ложной тревоги Р 1 – как отношение математического ожидания ложно выполненных к общему количеству возможных ошибочных отождествлений [4; 9].
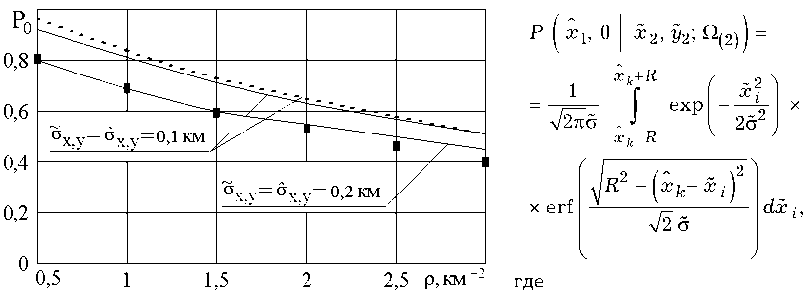
На рис. 1 приведены зависимости Р 0 от плотности размещения объектов, выявленных первым средством мониторинга, p i в общей зоне ответственности средств мониторинга. Сплош-
a
Рис. 1. Зависимости вероятности правильного отождествления от плотности размещения объектов в зоне мониторинга обстановки
ной линией представлены результаты, полученные на основе алгоритма (15) при R = 2 д, где д = д2 + д2, a = с = 0,1 км и 0,2 км, xyx,y x,y а пунктирной линией — при R = 3, 5 д. Черными квадратами обозначены значения Р0, найденные по правилу (16) при R = 2 д и дx y = д x у = 0,2 км. Вероятность ложной тревоги всюду составляет 0,01.
Из зависимостей следует, что при R = 2 д и указанных значениях <5 xy и д xy увеличение плотности объектов с 0,5 км - 2 до 2 км - 2 приво-
2 - erf (a) = e t dt
n
– функция (интеграл) ошибок, а условная вероятность ситуации отождествления (8) определяется выражением [7]
P ( x 1 , 0 I x 1 , y 1 )
г г
1 - exp
R 2
2д 2
X
-
2пд
X k + R
I
дит к снижению вероятности правильного отождествления с 0,9 до 0,65. С увеличением R до 3,5 д при р = 0,5 км-2 величина Р0 возрастает до 0,95, а при д™,, = д = 0,2 км, R = 3,5 д и x,y x,y р = (0,5 ...2) км 2 лежит в пределах 0,55^0,8 при вероятности ложной тревоги, не превышающей 0,02.
Установлено, что при R < 2 д вероятность правильного отождествления объектов даже
X erf
X k - R
1 1
<3
I
7 I
при значительных расстояниях между ними
Как показано в [7], с увеличением расстояния между объектами x k с 3,3д до 4д при R / д = 4 значение (22) повышается с 0,6 до 0,8, а за счет изменения R от 4д до д при x к /д = 3,3 — возрастает с 0,6 до 0,9.
ограничивается вероятностью попадания пара-
метров идентификации в область ^ ( 2 ) ■ Поэтому для достижения показателя Р 0 = 0,95...0,99 при Р 1 = 0, 01 требуется высокая (не менее 0,1 км) точность местоопределения объектов [7; 9].
В частном случае отождествления объектов по оценкам координат ( Х ^ y 1 ) и ( x 1 ; у 1 = 0 ) при наличии вскрытых двумя средствами мониторинга мешающих целей в точках ( x 2 ; y 2 ) и ( x 2 = 0; у 2 = 0 ) условная вероятность группирования однотипных параметров (18) в предположении, что д = д X + д У ^ 0, т. е. значения ( x 1 ; 0 ) и ( 0; 0 ) близки к истинным, имеет вид [7]:
Квазиоптимальный алгоритм отождествления (16) сохраняет работоспособность при малой плотности размещения идентифицируемых объектов и высокой точности оценки однотипных параметров. При р = ( 2 ... 3 ) км - 2 различие величин Р 0, найденных на основе (15) и (16) составляет 0,03…0,05 ввиду пропуска подлежащих отождествлению целей на этапе формирования модифицированных матриц условных вероятностей ситуаций отождествления. Установлено, что за счет уменьшения СКО д xy и д xy до 0,1 км при р = ( 2 ... 3 ) км - 2 применение квазиопти-мального алгоритма отождествления объектов
P ( x 1,01
x 1 , У ь q ( 2 ) ) = 1 - exP
' R 2
—
2д 2
,
приводит к получению заниженных значений Р 0 на 0,02…0,03.
Заключение
Таким образом, с использованием критерия минимума среднего риска [3; 4] и оценок максимального правдоподобия однотипных параметров [5] выполнен синтез алгоритма отождествления объектов при структурно-системном мониторинге обстановки в условиях априорной неопределенности признаков идентификации [5; 6]. Показано, что при равенстве нулю рисков принятия правильных решений и одинаковых информационных потерях для всех неправильных решений, а также равных значениях апостериорных вероятностей гипотез об отождествлении идентификации подлежат объекты с максимальной условной вероятностью ситуации отождествления. При этом априори неизвестные значения признаков идентификации, обусловленные, в том числе, их пропусками в различных средствах мониторинга, требуется заменять оценками максимального правдоподобия.
Список литературы Оптимальное и квазиоптимальное отождествление объектов при структурно-системном мониторинге обстановки
- Меньшаков Ю.К. Теоретические основы технических разведок. М.: МГТУ им. Н.Э. Баумана, 2008. 536 с.
- Иванкин Е.Ф., Понькин В.А. Теоретические основы получения и защиты информации об объектах наблюдения. М.: Горячая линия-Телеком, 2008. 386 с.
- Вопросы статистической теории распознавания // под ред. Б.В. Варского. М.: Cов. радио, 1967. 400 с.
- Машков Г.М. Статистические критерии и показатели качества отождествления локационных объектов // Известия вузов. Радиоэлектроника. 2001. T. 44. № 9. С. 40-48.
- Школьный Л.А., Ясько С.И. Отождествление РЭС на основе данных от разнородных датчиков информации // Радиотехника. 1999. № 9. С. 3-7.
- Разиньков С.Н., Решетняк Е.А. Многоальтернативное отождествление объектов с оценкой максимального правдоподобия однотипных параметров // Физика волновых процессов и радиотехнические системы. 2014. Т. 17. № 4. С. 38-42.
- Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки эффективности). М.: Радиотехника, 2006. 236 с.
- Попова О.Э., Разиньков С.Н. Отождествление объектов в системах активно-пассивной радиолокации // Измерительная техника. 2008. № 6. С. 43-48.
- Попова О.Э., Разиньков С.Н. Отождествление угловых координат целей в системах активно-пассивной радиолокации // Антенны. 2008. № 1(128). С. 58-61.
- Радиоэлектронные системы: основы построения и теория / под ред. Я.Д. Ширмана. М.: Радиотехника, 2007. 512 с.
