Оптимизация частот колебаний упругой пластинки в идеальной жидкости

Автор: Костиков Ю.А., Павлов В.Ю., Романенков А.М.
Журнал: Пространство, время и фундаментальные взаимодействия @stfi
Рубрика: Прикладные аспекты методов фундаментальной науки
Статья в выпуске: 1 (22), 2018 года.
Бесплатный доступ
В данной работе рассматривается задача оптимизации частоты колебаний упругой пластинки, котораяполностью погружена в идеальную жидкость. Моделью малых колебаний пластинки в данном случаеявляется интегро-дифференциальное уравнение с соответствующими граничными условиями. Данная задача рассмотрена в качестве модельного примера в книге Баничука Н. В. [5]. Особенностью данной задачи является специальный вид функционального уравнения, которому удовлетворяет функция отклоненияпластины от положения равновесия. Благодаря тому, что интегральный оператор является самосопряженным удалось получить необходимые условия экстремума, на основе которых был разработан оригинальныйчисленный алгоритм оптимизации частот колебаний. Поиск решения оптимизационной задачи основан наметоде проектирования градиента, этом в работе были получены точные формулы для отыскания проекции градиента. С использованием метода гидродинамических потенциалов задача о колебании пластины была сведена к задаче о колебании балки...
Колебания упругой пластины, метод проектирования градиента
Короткий адрес: https://sciup.org/142216007
IDR: 142216007 | УДК: 519.6 | DOI: 10.17238/issn2226-8812.2018.1.82-91
Optimization of vibration frequencies of the elastic plate in anideal fluid
In this paper, we consider the problem of optimizing the vibration frequency of the elastic plate, which iscompletely immersed in the ideal liquid. The model of small oscillations of a plate in this case is an integro-differential equation with the appropriate boundary conditions. This problem is considered as a model examplein the book Banichuk N. B. [5]. The peculiarity of this problem is a special kind of functional equation, whichsatisfies the function of deflection of the plate from the equilibrium position. Due to the fact that the integraloperator is self-adjoint, it was possible to obtain the necessary extremum conditions, on the basis of which anoriginal numerical algorithm for optimizing the oscillation frequencies was developed. The search for the solutionof the optimization problem is based on the method of gradient design, this work has been obtained exactformulas for finding the projection of the gradient. Using the method of hydrodynamic potentials the problem of plate oscillation was reduced to the problemof beam oscillation...
Текст научной статьи Оптимизация частот колебаний упругой пластинки в идеальной жидкости
Данная работа посвящена численному решению экстремальной задачи о поиске минимального собственного числа самосопряженного интегро-дифференциального оператора. Рассмотрим задачу на собственные значения. Необходимо найти нетривиальные решения уравнения d-^ Qh3 (x) ^ ^^’ ^ — A2 Qh (x) U (x, t) + a ^ К (x, t) U (x, t) dt^ = 0
и соответствующие значения A 2 , удовлетворяющее граничным условиям:
U | x= - i = U | $ =1 = 0,
d2U = d2U dx2 x=-1 dx2
где x Е [— 1; 1], 0 < t < 1, К(x,t) = — ln выставлено дополнительное ограничение:
j h(x)dx = P,
1 +
/ (i - a )(i+t)
V (1 - <)(1+ ж )
/ (i - x)(i+t)
V (i - t)(i+x)
P > 0,
, h(x) Е C 2 [ — 1; 1] и на функцию h(x)
h min
< h(x) < h max .
Далее введем функционал:
J (h(x)) = A i ,
где Ai — первое собственное число задачи (1)-(3). В данной работе описывается численный метод, который позволяет определить такую функцию h(x), что J (h(x)) принимает минимальное значение.
Стоит отметить, что уравнение (1) возникает при описании малых колебаний пластинки бесконечной длины и фиксированной ширины в безграничном объеме идеальной несжимаемой жидкости.
Плоскость Оху, в которой происходят колебания пластинки и жидкости, перпендикулярна длинным краям пластинки. Точка А(х = —Цу = 0) и В(х = 1,у = 0) на плоскости Оху соответствуют закрепленным краям. Ширина пластинки равна 2Z (см. рисунок 1). Предполагается, что толщина пластинки является переменной по координате х, то есть h = h(х), и не меняется в направлении оси z (ось параллельная закрепленным краям пластинки). Обозначая через t время, а через и = u(х,t) и Q = Q(х,t) соответственно функцию прогиба пластинки и реакцию жидкости, можно записать уравнение цилиндрических колебаний пластинки:
. 92и , 92 (тл Eh3 - p1h9t2 + дх2 vdx2; Q’ D 12(1 - 12)' (5)
Здесь D — жесткость пластинки при изгибе, Е — модуль Юнга, 9 — коэффициент Пуассона, р 1 — удельная плотность материала пластинки. Для определенности примем следующие граничные условия в точках А и В, соответствующие шарнирному закреплению концов пластинки:
I I 9 2к 9 2U и|л = и|в = 0, 9^ = ЭА =0- (6)
х л х в
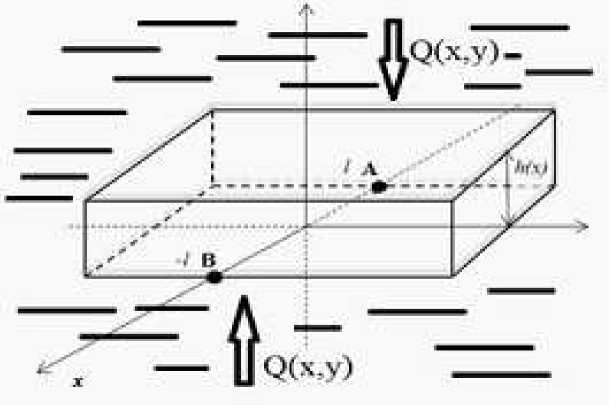
Рис. 1.
Движение жидкости предполагается безвихревым с потенциалом поля скоростей у = ^(х, у, t), удовлетворяющим уравнению Лапласа и линеаризованным граничным условиям
9 2 ^ 9 2 ^
9х2 9у 2
9^ ди
9у ( х, е) 9t '
9^ ди
9у ( х, - е) ~ 9t
— I < х < I, е > 0.
Граничные условия (8) получены путем сноса на ось х условий непротекания жидкости через поверхность пластинки. При этом используются предположения о малости прогиба и, гладкости функции h(х), а также о безотрывности движений жидкости и пластинки.
Распределение давлений р = p(х,у,t) в жидкости вычисляется с помощью интеграла Коши-
Лагранжа
Р = Р ^
р [#+2 ( v^ ) 2] ^ р »
9^
Р2 9Й’
где Р 2 — плотность жидкости, р ^ — давление жидкости на бесконечности. При выводе данного соотношения учтен тот факт, что скорость жидкости мала на бесконечности. Соотношение (9) позволяет определить р, если найден потенциал р. Реакция жидкости Q(х,t), фигурирующая в правой части уравнения колебаний (1), определяется линеаризованной формулой
Q = Р - Р+, где через р+ = (р(х, 0, t))+ и р = (р(х, 0, t)) обозначены распределения давлений соответственно для верхнего и нижнего берегов разреза —l < х < l, у = 0. Определяя Q из соотношений (9), (10) и подставляя найденное выражение в (5), можно преобразовать уравнение колебаний пластинки к виду
+ тп )= Р2 г■;—^). (и)
dt 2 Ух2 \ Ух2/ \ dt ot J
Приходим к замкнутой краевой задаче гидроупругости. Гидродинамическая задача (7), (8) об определении потенциала р и задача (6), (11) о колебаниях пластинки являются связанными, так как в граничные условия (8) входят распределения скоростей колебания пластинки, а в правую часть уравнения (11) — производные потенциала р.
Решение задачи (6)–(8), (11) будем искать в виде к = eMtU (х) , р = iweMtФ (х, у) .
Для удобства анализа и решения задачи перейдем к безразмерным переменным и обозначениям х' = х/l, у' = у/l, U ' = U/l, Ф' = Ф/12, h' = lh/S (13)
A 2 = 12p i l 6 (1 — У 2 ) ш2/S 2 Е, a = p 2 l 2 /p i S, (14)
где S — площадь поперечного сечения пластинки. Штрихи у безразмерных переменных в дальнейшем опускаются.
Подстановка в (12), (13) в (6)–(8), (11) приводит к следующим соотношениям для определения амплитудных функций U (х) и Ф(х, у).
U |
^h 3 1^ — A 2 ( hU -а ( Ф + — Ф )) = 0, ах2 \ ах2) "
х=
i = U |
■=1
= 0,
d2U
ах 2
х=
i
УФ
УФ
д 2 Ф
У 2 Ф
Эх 2 Уу 2
= 0,
d2U
ах 2
■=i
= 0,
9у (х, е)
Уу / (■
= U,
1 <
х
< 1,
е> 0.
.х,
е)
Таким образом, путем разделения пространственных и временной переменных исходная задача (6)–(8), (11) сводится к краевой задаче (15), (17) на собственные значения для дифференциального уравнения (15) при граничных условиях (16) и связанной с ней граничной задаче (17), (18) для уравнения Лапласа во внешности разреза — 1 < х < 1, у = 0.
1. Решение гидродинамической задачи
Определим функцию (потенциал) Ф(х,у), являющуюся решением краевой задачи (17), (18). С этой целью рассмотрим вспомогательную функцию W = Ф + г Ф, аналитическую в плоскости с разрезом — 1 < х < 1, у = 0. Из условий Коши-Римана и граничных условий (18) будем иметь
УФ/Ух = УФ /ду = U,
откуда
• X
ф =
-
и (€)d— + С (у) = f (ж) + С (у).
Задача определения потенциала Ф сводится к отысканию мнимой части аналитической функции W , действительная часть которой на отрезке [ — 1,1] равна
KeW = Ф = f (ж) + С (у). (21)
Решение данной задачи легко выписывается (z = ж + гу):
W =Л ( )2 [ 1 ( ) 2 f^ dt, 2ттг \z + 1/ У- \t — 1 У t — z
1 С 1 f (t) + С _
2^г 7-1 , d0
Соотношение (23) служит для определения постоянной С .
Учитывая, что
1 Г1
7 г J-i Vt2 — 1’ из (23) можно получить
С = 1 f 1
71 У- 1 V— 2 — 1.
Используя далее выражение (22) для С и формулу
1 Г 1 У € + 1 А 2 de =1 / z +1 А 2 - 1
27 1-1 U — М € — z 2 ^z — 1) 2 ’ выполним следующие преобразования в представлении (22) для W:
-
1 ( z — 1 А 2 Г 1 / € + 1 А 2 f(€)d€ С Г _( z — 1 А21 2^ +1J Li V— — 1- € — z +2[ V + 1) ]
-
2 1 f <«
-
2 72 \z +1У У- 1 \— — 1У \— — z € +1У 2
-
Vz2—I f1 f(€)d_€
27г J-1 (€ — z)V€2-"T2 .
Вычислим величину Ф+, переходя к пределу в (22) при z = ж + гу ^ ж + 20 (0 < у ^ +0) и выделяя в полученном выражении мнимую часть
Ф+ = lim [Im W(ж + 2у)] = — V1 ж2 (у.р. / ----f (€)d€.
^-+0 27 -1 (€ — .ж '€
Для разности потенциалов на верхнем (плюс) и нижнем (минус) берегах разреза имеем
Ф+ — Ф- =2Ф+,(29)
Преобразуем интеграл (28), используя определение интеграла в смысле главного значения:
2ф + =i к„. [1 (е—ж а 2 f(ts^=
7 \ У-1 V 1 — t2 ) t — ж у
Выполняя далее интегрирование по частям, используя выражение (20) для /(t), обозначая через К(t, x) ядро интеграла, получим
|
2Ф + = lim 6 —^0 |
[к (x — e, x) j U (t) dt — К (x + e, x) j U (t) dt — - j К (t,x)U (t) dt — У U (t) dt . (31) |
Стоит отметить, что все выражения в правой части (30) (записанные в квадратных скобках) конечны, и, следовательно, применение интегрирования по частям законно. При е ^ 0 сумма первых двух членов в (31) обращается в нуль, а два последних интеграла сходятся. Таким образом, искомая зависимость величины скачка потенциалов Ф+ —Ф-= 2Ф+ от распределения прогибов пластинки имеет вид
2Ф + =
f.
К(t, x)U(t)dt.
Подставляя найденные величины в (15) и в (16), придём к уравнению (1) с граничными условиями (2).
2. Описание метода решения
Обозначим левую часть уравнения (1) через LU и перепишем его в следующем виде: LU = 0. Тогда из соотношения (LU,U ) = 0 и из уравнения (1) можно выразить собственное число
А 2
________J-^M^S)^________
Jj^ h(x)U 2 (x)dx + a J [ _ 1.1] х [ _ 1.1] К(x,t)U (x)U (t)dxdt
Получим необходимое условие оптимальности в задаче (1)–(4). Выписывая для этого уравнение Эйлера по h для функционала (33), имеем
^ U - " 2 = = 2 ,
^х
где с 2 - множитель Лагранжа.
При решении подобных задач с применением известных алгоритмов оптимизации требуется на каждом шаге алгоритма определять величины U (х) и А, удовлетворяющие условиям (2), (3). Для этой цели в данной работе используется метод последовательных приближений.
Для численной реализации этого метода удобнее перейти от уравнения (1) к системе уравнений вида:
( h^u^ = у
I У тт = А (hu + a J .1 К (t, x)u(t)dt^
Тогда граничные условия (2) могут быть переписаны в следующем виде:
uL = - 1 = и т=1 = y| T= - 1 = у| т=1 = 0 (36)
Согласно методу Чернусько организуем итерационный процесс
J h^u^ = y ( s +1)
[ уТТ ') = hu s + a J 1 1 К (t, x) u ( s ) (t) dt
A ( s +1) =
k"L-.u'"-4
(hu ( s +1) + a J 1 1 К (t, x) u ( s +1) dt, u ( s +1) )
Итак, возникает следующая задача: определить функции и(х) и у(х) и управляющую функцию h(x), удовлетворяющие уравнениям (37), граничным условиям (36) и ограничениям (3) и также, чтобы первое значение А из (1) принимало минимальное значение.
Для решения этой задачи применяется метод проектирования градиента. Для реализации этого метода необходимо выразить вариацию оптимизируемого функционала через вариацию управляющей функции h(x):
s а =
J-^
А u2) Sh dx
Д ^г-и2 + au J k1 К (t, х) и dt ) dx
.
Для численного решения задачи вводим разностную сетку { x q , х 1 , ..., х „ } с постоянным шагом Ах = x i +1 — x i , i = 0, . .. , V — 1. Функция h(x) аппроксимируется кусочно-постоянной функцией вида:
h(x) = h i при x i- 1 < x < x i , i = 1..V,
где h i — некоторые константы. Тогда оптимизируемый функционал А становится функцией V переменных, т.е.
А = F (h 1 , ^ 2 , ..., h N ).
Для оптимизации этой функции применим метод градиентного спуска. Формула (39) позволяет определить производные SA/Sh i , а именно
5А sh i
34 - А -
E N=1 h , u ,2 + a EN x EN =i К зк и , - k A x ’
i = 1..V.
Чтобы учесть ограничения (3) применим метод проектирования градиента.
Пусть проекция точки а на гиперплоскость имеет координаты (х 1 , х 2 , ..., x n ). Для нахождения этой точки необходимо решить следующую классическую задачу на условный экстремум
Откуда следует, что
X i
Е^1 ( x i — a i ) 2 Ax E i N =1 X i
^ min, = Р.
V (e a i - AX)
Пусть решается задача минимизации фундаментальной частоты. Тогда градиентный метод заключается в построении последовательности {h i } N q .
Обозначим
— k+1 h i
, k дА = h i —a k d>hi ,
тогда
7 । ~ k+1
h k+1 = h i
— - fz /r i k +1 — .
V y~1 Ax j
Учитывая симметрию задачи относительно точки х = 0, будем искать решение на интервале [0, 1], выставив в точке х = 0 граничные условия иж|ж=о — ^ж|ж=0 — 0.
Как было отмечено выше, задача на собственные значения (в данном случае речь идет о первом собственном значении) решается методом последовательных приближений. Для численного решения используется центральная разностная схема, аппроксимирующая уравнения (35) с последующим применением метода матричной прогонки.
Дискредитированная задача имеет следующий вид:
''.
k :..
— 2r , + f ^+i =
At 2
a2
2ui + гц+1 A at у '
(N kiui + c У^ К(tj j=0
, X i )u j At
i,j = 1-^. (47)
Критерием остановки итерационного процесса является выполнение условия
|A ( s +1) — A ( s ) | + ||k ( s +1) — k ( s ) || ^ < e, где e — требуемая точность.
-
3. Результаты
Стоит отметить следующий факт, что форма прогиба U и толщина k(x) выглядят идентично для жестко закрепленных краев и для шарнирно закрепленных, поэтому будут представлены графики соответствующих функций для шарнирно закреплённых краев.
Рассмотрим шарнирный способ закрепления. Зададим c = 0.025, при этом первое собственное число А = 1,1379, получено без управления, а именно, при константной k(x) = 0.9. В случае, использования функции толщины, которая вычислена по алгоритму, который предложен в данной работе значение собственного числа А = 0, 9578, то есть уменьшение произошло чуть более чем на 15%. На рисунке 2 представлена функция прогиба, толщина показана на рисунке 3. Количество итераций, потребовавшееся для e = 0.001 равно 57.
Для жестко закрепленных краев ситуация аналогичная, только число итераций равно 46.
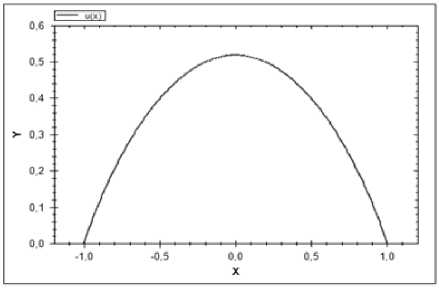
Рис. 2.
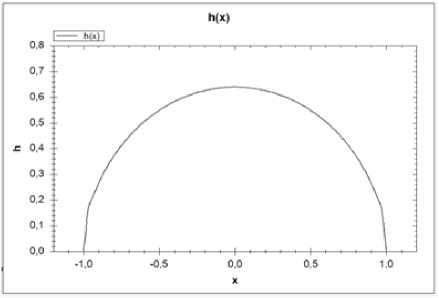
Рис. 3.
Список литературы Оптимизация частот колебаний упругой пластинки в идеальной жидкости
- Баничук Н.В. Оптимизация устойчивости стержня с упругой заделкой//Изв. АН СССР. МТТ. 1974. № 4. С. 150-154
- Olhoff N. Optimal design of vibrating rectangular plates. Internet J. Solids and Structures. 1974, vol.10, № 1
- Лаврентьев М.А., Шабат Б.В. Методы теории функций комплексного переменного. М.: Наука, 1965. 736 с
- Черноусько Ф.Л., Баничук Н.В. Вариационные задачи механики и управления. М.: Наука, 1973. 236 с
- Баничук Н.В. Оптимизация форм упругих тел. М: Наука, 1980. 256 с
- Петров В.М., Черноусько Ф.Л. О равновесии жидкости, ограниченной гибкой пленкой. М.: изв. АН СССР. МТТ, 1971. № 4. С. 131-142
- Гурченков А.А., Муравей Л.А., Романенков А.М. Моделирование и оптимизация технологического процесса ионно-лучевого травления//Инженерный журнал: наука и инновации. 2014. № 1. References
