Оптимизация двухлистового упругого элемента протеза стопы с использованием линейной и нелинейной теории изгиба

Автор: Брынских C.И., Осипенко М.А., Няшин Ю.И.
Журнал: Российский журнал биомеханики @journal-biomech
Статья в выпуске: 2 (20) т.7, 2003 года.
Бесплатный доступ
Рассмотрены математические модели линейного и нелинейного изгиба упругого элемента протеза стопы, представляющего собой двухлистовую рессору с зазором между листами. На основе этих моделей конструкция упругого элемента оптимизирована: найдены толщины листов и длина верхнего листа, обеспечивающие минимальную напряженность упругого элемента при заданных размере и податливости. Проведено сравнение моделей.
Протез стопы, упругий элемент, двухлистовая рессора, линейный изгиб, нелинейный изгиб, оптимизация
Короткий адрес: https://sciup.org/146215765
IDR: 146215765 | УДК: 531/534:57+612.7
Текст научной статьи Оптимизация двухлистового упругого элемента протеза стопы с использованием линейной и нелинейной теории изгиба
Многие современные конструкции протеза стопы содержат упругий элемент, который представляет собой консольно закрепленную многолистовую рессору с зазорами между листами или без них (см. рис. 1: a – серийный образец, изготовленный на экспериментальном заводе средств протезирования, г. Реутово, Московская область; б – опытный образец упругого элемента, изготовленный в Пермском НИИ композиционных материалов из углепластика КМУ-4Л; в – упругий элемент протеза стопы Carbon Copy , изготовленный фирмой Ohio Willow Wood Company , США [1]; г – упругий элемент протеза стопы Quantum Foot , изготовленный фирмой Hanger Inter Med , Великобритания). Основная проблема, возникающая при конструировании упругого элемента, – обеспечение заданных упругих характеристик и одновременно максимальной прочности.
Упругие элементы указанного вида сейчас активно изучаются, в том числе теоретически, как в России, так и за рубежом [1–9]. Однако полной и адекватной математической модели упругого элемента не имеется и в ближайшее время такая модель, вероятно, не будет создана ввиду значительной сложности конструкции. Разрабатываются упрощенные модели, отражающие поведение упругого элемента в некоторых частных случаях.
В данной работе за основу взята математическая модель, разработанная на кафедре теоретической механики Пермского государственного технического университета [7, 8]. В эту модель внесены новые элементы – учтены зазор между
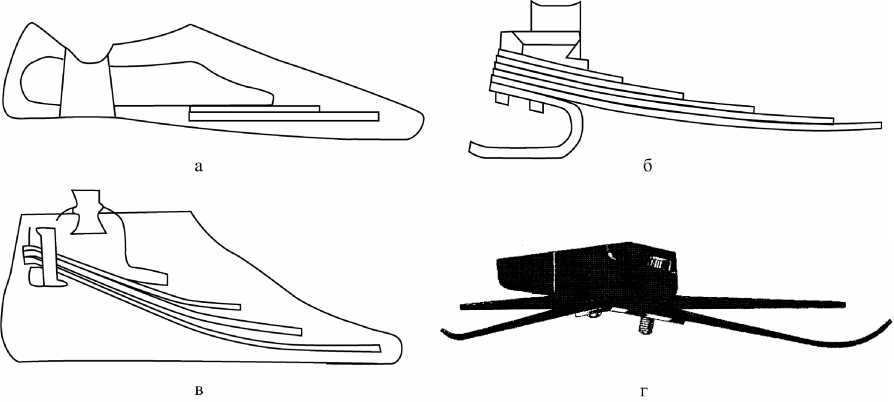
Рис. 1. Разновидности упругого элемента протеза стопы
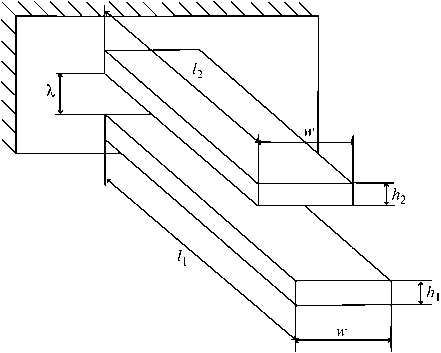
Рис. 2. Модель упругого элемента
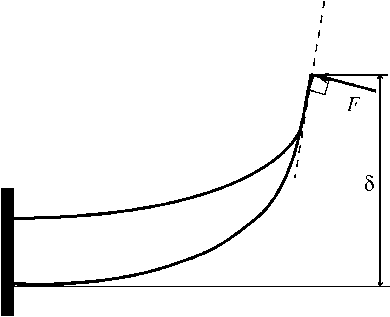
Рис. 3. Схема изгиба упругого элемента
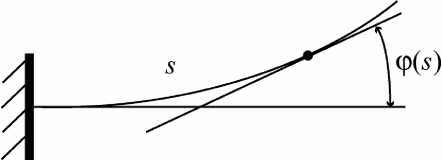
Рис. 4. Функция, описывающая форму изогнутого листа листами и геометрическая нелинейность изгиба листов. В рамках построенной модели решены требуемые задачи математического моделирования двухлистового упругого элемента – расчет изгиба под действием заданной нагрузки и оптимизация конструкции, то есть нахождение параметров элемента, обеспечивающих максимальную прочность при заданных размере и податливости (размер определяется размером обуви пациента; податливость выбирается по желанию пациента или из медицинских соображений). Проведено сравнение полученных результатов с результатами немодифицированной модели (там, где такое сравнение возможно). Показано, что предложенная новая модель дает, вообще говоря, лучшие результаты и, следовательно, может рассматриваться как определенный шаг в направлении построения упомянутой выше полной и адекватной математической модели.
Модель изгиба упругого элемента и постановка задачи оптимизации
Используемая модель упругого элемента показана на рис. 2. В этой модели упругий элемент представляет собой два плоских (в отсутствии нагрузки) листа прямоугольного сечения, отстоящих друг от друга на заданном расстоянии λ ; один край каждого листа защемлен, другой свободен. Листы изготовлены из материала с модулем Юнга E и имеют одинаковые ширины w ; длины l 1 > l 2 и толщины h 1 , h 2 листов различны (нижний индекс 1 или 2 здесь и далее означает величины, относящиеся, соответственно, к нижнему и верхнему листам). К краю нижнего листа, перпендикулярно ему, приложена заданная следящая сила F , равномерно распределенная по ширине листа (рис. 3). Эта сила моделирует реакцию поверхности при ходьбе на протезе. Под действием силы F листы испытывают совместный изгиб (рис. 3; изгиб не предполагается малым). Геометрически толщины листов считаются равными нулю; реальные толщины входят только в изгибные податливости листов (см. ниже). Изгиб считается цилиндрическим, так что формы листов полностью описываются их профилями. Предполагается, что контакт профилей листов либо происходит только в одной точке (расположенной на краю верхнего листа), либо вообще отсутствует (при достаточно малой величине силы F ). Трением между листами пренебрегаем. Профиль изогнутого листа длины l (не меняющейся при изгибе) описывается функцией ф(s ), где 0 < s < l - длина дуги профиля листа от точки защемления до некоторой произвольной точки (криволинейная координата этой точки), ϕ – угол между касательными к профилю в этих точках (рис.4).
Предполагается [10], что в точке с криволинейной координатой s на левую (относительно этой точки) часть листа со стороны правой части действует (сосредоточенный) момент
M = фЧs)/a, (1) где a = 12/Ewh3 - изгибная податливость листа, а “напряжение” (oss на нижней поверхности листа) в этой точке
Eh
^ ( s ) = — ф( s ).
Обозначим через 5 прогиб упругого элемента, то есть расстояние между краем верхнего листа и касательной к профилю этого листа в точке защемления (рис. 3). Введем также обозначение
σ max
= max i max| m ( s )|, max| ^ >( s )| I
V 0 < s < 1 1 0 < s < 1 2 J
(максимальное напряжение в упругом элементе). При заданных E , w , l 1 , F величины δ и σ max являются функциями l 2 , h 1 , h 2 :
5 = 5( 1 2 , h i , h 2 ), (4)
O max = О max( I 2 , h i , h 2 ). (5)
Как упоминалось во введении, размер l 1 упругого элемента и его податливость (прогиб δ 0 при определенной силе F ) заранее заданы; требуется максимизировать прочность (минимизировать σ max ). Тогда математическая постановка задачи оптимизации принимает следующий вид.
Задача . Для заданных E , w , 1 1 , F , 5 0 , найти 1 2 , h ^ , h 2 , минимизирующие σ max( l 2, h 1, h 2) при условии
5 ( 1 2 , h i , h 2 ) = 5 o . (6)
Алгоритм численного решения задачи оптимизации
Сформулированная задача оптимизации решалась численно. Вначале был построен алгоритм вычисления функций (4) и (5). Опишем этот алгоритм.
Если контакт между листами отсутствует, то верхний лист остается плоским, а на нижний действует одна сила F (рис. 5). Составляя с помощью (1) уравнение равновесия участка AB нижнего листа (рис. 5), найдем
-
- ф " ( 5 )/ a i + FH ( 5 ) = 0, (7)
где l1
H ( 5 ) = J cos( ф 1 ( 1 1 ) - ф 1 ( x )) dx (8)
s
– плечо силы F относительно точки A . Подставляя (8) в (7), дифференцируя полученное соотношение по 5 и учитывая, что ф 1 (0) = 0 (условие защемления) и ф " ( 1 1 ) = 0 (следует из (7) и (8)), получим краевую задачу для ф 1 ( 5 ):
ф "' ( 5 ) = - a i F cos( Ф i( 1 1 ) - Ф 1( 5 )), 0 < 5 < 1 1 ,
< Ф 1 (0) = 0, (9)
ф " ( 1 1 ) = 0.
Задача (9) неудобна для численного решения, так как является краевой (а не задачей Коши) и, кроме того, содержит неизвестное заранее ϕ 1 ( l 1 ) . Поэтому была введена вспомогательная функция
-
У 1 ( 5 ) = ф " ( 1 " ) — ф " ( 1 " — 5 ) (10)
(геометрический смысл этой функции – отсчитываемый от свободного края листа угол между касательными к профилю листа в точке на этом краю и в точке c криволинейной координатой 1 " - 5 ). Из (9) и (10) получим задачу Коши для ф 1 ( 5 ):
^ 1" ( 5 ) = a 1 F cos ^ " ( 5 ), 0 < 5 < 1 " ,
« ^ 1 (0) = 0, (11)
у " (0) = 0.
Решив задачу (11), найдем из (10)
ф "( 5 ) = У 1( 1 1 ) - У 1( 1 1 - 5 ). (12)
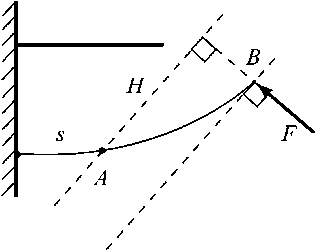
Рис. 5. Схема изгиба листов при отсутствии контакта
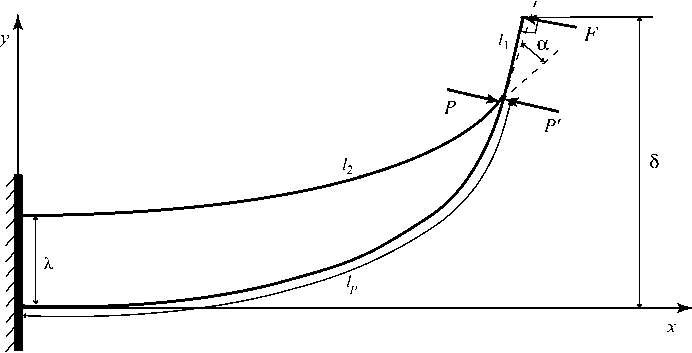
Рис. 6. Схема изгиба листов при наличии контакта
Так как предполагалось, что верхний лист остается плоским, то
ϕ 2 ( s ) ≡ 0. (13)
Это предположение справедливо, если (как следует из простых геометрических соображений)
s
∫ sinϕ1 (x)dx < λ при всех s ≥ 0, таких что s
∫ cos ϕ 1( x ) dx ≤ l 2 . (14)
Если условие (14) не выполнено, то между листами происходит контакт. Схема изгиба нижнего и верхнего листов (соответствующая сформулированному во введении предположению о характере контакта) приведена на рис. 6. На нижний лист действуют силы F и P , на верхний лист действует сила P ′ = - P , причем величина силы P , криволинейная координата lP точки контакта и угол α между силой P ′ и нормалью к профилю верхнего листа в точке контакта (он же угол между профилями листов в точке контакта) заранее неизвестны. Составляя уравнения равновесия участков листов, расположенных между свободным краем и точкой с криволинейной координатой s и вводя вспомогательную функцию
ψ 2( s ) = ϕ 2( l 2) - ϕ 2( l 2 - s ), (15)
получим, аналогично (11), задачу Коши для ψ 1 ( s ) , ψ 2( s ) :
v'1 ( s ) =
<
a 1 F cos ψ 1 ( s )
a 1 F cos V | ( s ), 0 < s < 1 1 - I P , - a i P cos( V 1 ( s ) - V 1 ( 1 1 - 1 p )), 1 1
— 1p < s < 11,
< v 2 ( s ) = a 2 P cos( v 2( s ) + a ), 0 < s < 1 2
V 1 (0) = V 2 (0) = 0, v' 1 (0) = v 2 (0) = 0.
Функции ϕ1(s) и ϕ2(s) выражаются через решение задачи (16) по формуле (12) и по аналогичной формуле ф2(s) = V 2(12) - V 2( 12 - s). (17)
Эти функции зависят от параметров P , 1P , a : ф 1 = ф 1( P , 1P , a , s ), ф 2 = ф 2( P , 1P , a , s ). Параметры должны быть далее найдены из: а) условия совпадения значений координаты x точки контакта (рис. 6) при их вычислении с использованием сначала ϕ 1( s ) , а затем ϕ 2( s ) ; б) аналогичного условия для координаты y ; в) из упоминавшегося выше условия совпадения угла между профилями листов в точке контакта с углом α . Эти условия представляют собой систему трех алгебраических уравнений относительно P , lP , α :
1P j cosф1(P, 1P,a,s)ds - jcosф2 (P, 1P,a, s)ds = 0, 00
1P
< Jsin ф1( P, 1P, a, s) ds -J sin ф 2( P, 1P, a, s) ds - X = 0,(18)
ф 1( P , 1P , a , 1P ) - ф 2( P , 1P , a , 1 2) - a = 0.
Окончательно алгоритм вычисления функций (4) и (5) выглядит следующим образом. Сначала численно (методом Рунге – Кутта [11]) решается задача (11). Затем по формуле (12) находится ϕ 1 ( s ) и проверяется условие (14). Если это условие выполнено, то для ϕ 2( s ) справедливо (13). После этого находится δ l 1
5 = J sin ф 1( s ) ds (19)
и из (12), (13), (2) и (3) находится σ max . Если условие (14) не выполнено, то численно решается совместно задача (16) (методом Рунге – Кутта) и, с учетом (12) и (17), система (18) (методом Ньютона с численным нахождением производных [11]). После этого из (19) находится δ и из (12), (17), (2) и (3) находится σ max .
Далее численно находился минимум функции (5) при условии (6). Для этого сначала условие (6) численно разрешалось (методом Ньютона) относительно l 2 :
1 2 = 1 2 ( h 1 , h 2 ). (20)
Подставляя (20) в (5), получим (вообще говоря, негладкую) функцию двух переменных ( h 1 , h 2 ), точка безусловного минимума которой ( h ^ , h 2 ) находилась численно (методом Нелдера – Мида [12]). Далее из (20) получаем оптимальное значение 1 2 = 1 2 ( h 1, h 2) и из (5) получаем минимальное значение о max :
* ,,* ,* ,*.
° max = ° max ( 1 2 , h 1 , h 2 ) .
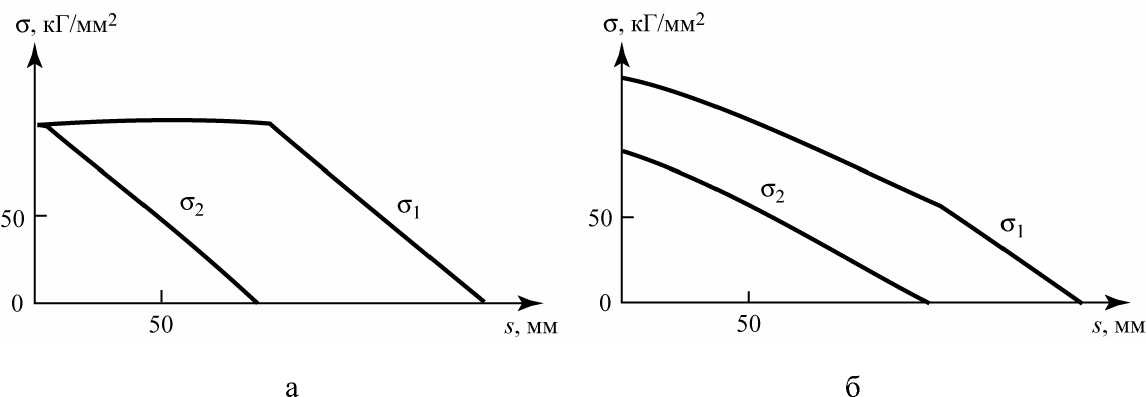
Рис. 7. Напряжения в листах оптимального (a) и неоптимального (б) упругих элементов
Приведем пример результата реализации описанного алгоритма численного решения задачи оптимизации. Все дальнейшие численные результаты соответствуют E = 9533 кГ/мм2 (углепластик КМУ-4Л), w = 60 мм , X = 8 мм , 1 1 = 180 мм, F = 1,5 • 80 кГ. При 5 0 = 100 мм описанный алгоритм дает h * = 3,08 мм, h 2 = 2,70 мм, 1 2 = 89,5 мм , a max = 112 кГ/мм2. На рис. 7а показаны зависимости с 1( s ) и ст 2( s ) для упомянутых оптимальных значений параметров. Для сравнения, на рис. 7б показаны те же зависимости для неоптимальных (но соответствующих 6 = 6 0 ) значений параметров h 1 = 3,25 мм, h 2 = 2,00 мм , 1 2 = 120 мм; для этих значений a max = 145 кГ/мм2. Другие примеры приведены ниже (при сравнении результатов, полученных при использовании нелинейной и линейной теорий изгиба).
Аналитическое решение задачи оптимизации с использованием линейной теории изгиба
Проведем линеаризацию соотношений (2), (3), (11), (12), (14), (16)-(19) по параметрам F и λ . Получающиеся приближенные варианты этих соотношений соответствуют линейной теории (слабого) изгиба [10]. Решения (11), (16) и (18) тогда находятся аналитически; после простых преобразований получаем (символом ~ обозначены величины, найденные в линейном приближении):
(i) если X > X c , то
£( 1 2, h 1 , h 2) = 4 1 1 FlEwhl, C ( s ) = 6( 1 1 - s ) F / wh 2 , C 2 ( s ) = 0;
где
(ii) если X < X c , то
δ ( l 2 , h 1 ,
<~ 1( s ) =
h 2) = 2 ( 2 1 13 F - 1 22 (3 1 1 -
6 ( ( 1 1 - s ) F - ( 1 2
-
1 2 ) P У Ewh l ,
s ) P У wh 2 , 0 < s < 1 2,
6( 1 1 - s ) F/whl, 1 2 < s < 1 1 , ^2 ( s ) = 6( 1 2 - s ) P*/wh 2 ,
~
P =
(3 1 1 - 1 2) F (к! - XEw) 2 1 2 .
λ c
2 1 2 (V h 3 + v h 3 )
= 2 1 2 (31 1 - 1 2) F^wh ^ ;
;
с ттах ( 1 2, h 1 , h 2) далее вычисляется по формуле (3).
Построение аналитического решения задачи оптимизации, даже для рассматриваемого линейного приближения, сопряжено с весьма громоздкими вычислениями [7]. Поэтому используем здесь предложенный в [7] эвристический метод решения (используемый только в линейном приближении; строгое обоснование метода имеется только для X = 0). Этот метод состоит в том, что условие минимизации
^тах ( 1 2, h 1 , h 2) заменяется на условие
< ( 5 ) = <~2 (0) для 0 < s < 1 2
(оптимальный упругий элемент должен быть равнонапряженным ). Заметим, что сама возможность выполнения условия (26) существует только в линейном приближении и только в случае (ii). В этом случае условие (26), с учетом (22) и (23), равносильно
~
~
равенствам F = P и < 1 (0) = < 2 (0). Добавляя эти равенства к условию 5 ( 1 2, h 1 , h 2) = 5 0
~* ~* ~*
и используя (21)-(24), получим систему алгебраических уравнений для 1 2 , h 1 , h 2 :
' 2 F ( 2 1 13 - 1 22 (3 1 1 - 1 2 ) )/ Ewh 3 = 5 0 ,
(3 1 1 - 1 2 ) F/h i3 - XEwj21 2
Г = ---------1—,—:----:—гЛ-----
2 1 2 1 h 3 + 1/ h 2 )
. ( 1 1 - 1 2 )/ h i2 = 1 2 / h 2 .
<
,
Несложное исследование этой системы приводит к выводу, что при 5 0 > X (это неравенство будем считать выполненным, так как обычно 5 0 >> X ) она имеет единственное (положительное) решение, которое можно представить в виде:
h* = 1 1 (2 F (2 - ц 2 (3 - ц ))/( EwS o ) f,
h 2= vhl,(28)
~2* = Mli,(29)
где
M = v 2/(1 + v2),(30)
ν – (положительный) корень уравнения
3(k - 1)v4 + 2v3 + 6kv2 + 2k = 0,(31)
k = ^50 .(32)
Для ν можно найти явное выражение, которое здесь не приводим ввиду его громоздкости. Из (22) и (29) получаем минимальное значение σ ~ max :
~ * σ max
l 1
( 5 E21 - M F J
( 4(2 + 2 m - M 2 ) 2 w J
Формулы (27)-(33) дают аналитическое решение задачи оптимизации с использованием линейной теории изгиба. Заметим, что при X = 0 из (28)-(32) получается известный результат [7]: 1 2 * Д = 4/13, h 2* / h f = 2/3 .
Сравнение результатов оптимизации, полученных с помощью нелинейной и линейной теорий изгиба
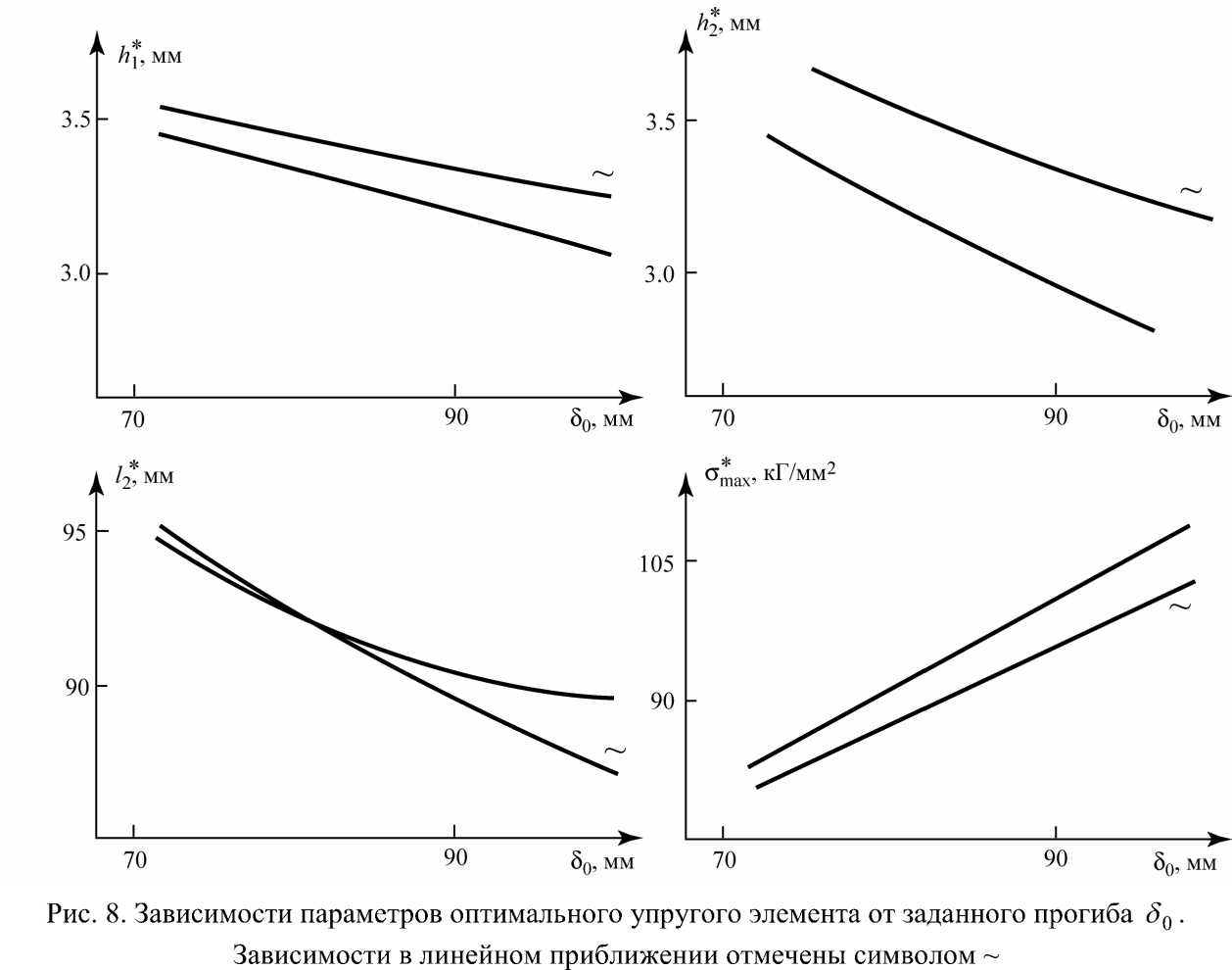
На рис. 8 показаны зависимости оптимальных толщин листов, оптимальной длины верхнего листа и минимизированного максимального напряжения от заданного прогиба δ 0 . Каждая зависимость приведена для нелинейной теории изгиба и в линейном приближении. При 5 0 = 100 мм погрешности величин h * , h 2 * , 1 2 * , <~ max по отношению к h * , h 2 , 1 2 , о max равны, соответственно, 5,8, 16, 2,7 и 6,3%. Следовательно, линейное приближение дает достаточную точность при вычислении l 2 , удовлетворительную - при вычислении h / и о max и непригодно при вычислении h 2 . Следует, однако, заметить, что качество линейного приближения определяется не только приведенными погрешностями, но и другими факторами. Во-первых, линейное приближение дает заниженное значение σ max , что нежелательно вблизи предела прочности материала (94кГ/мм2 для углепластика КМУ-4Л). Во-вторых, если с помощью нелинейной теории подсчитать δ для параметров, считающихся оптимальными согласно линейной теории, то эта величина будет заметно отличаться от 5 0 . Например, при 5 0 = 100 мм описанный выше численный алгоритм дает 5 = 86,0 мм
~
~
~
(для h 1 = h 1 = 3,26 мм, h 2 = h 2 = 3,15 мм, 1 2 = 1 2 = 87,1 мм).
Выводы
Сравнение результатов оптимизации двухлистового упругого элемента, полученных с помощью нелинейной и линейной теорий изгиба, показывает, что для ряда параметров элемента линейное приближение дает недостаточную точность. Поэтому использование нелинейной теории является необходимым. Вместе с тем, для некоторых параметров линейное приближение приемлемо. Кроме того, линейная теория позволяет проводить качественное исследование задачи. Поэтому в настоящее время обе теории имеют определенные области применения. Вероятно, вопрос об относительной важности этих теорий может быть окончательно разрешен только при исследовании задачи оптимизации многолистового упругого элемента. Переход к многолистовому элементу необходим, так как даже минимизированное максимальное напряжение в двухлистовом элементе при реальном прогибе превышает, как показано выше, предел прочности материала.
